第四章 矩阵的分解
- 格式:ppt
- 大小:675.00 KB
- 文档页数:88

矩阵分解总结-回复矩阵分解总结:1. 什么是矩阵分解矩阵分解是将一个矩阵拆解成若干个子矩阵的过程。
通过分解矩阵,我们可以更好地理解矩阵的性质和结构,从而简化矩阵的计算和应用过程。
常见的矩阵分解方法包括LU分解、QR分解、奇异值分解(SVD)和特征值分解等。
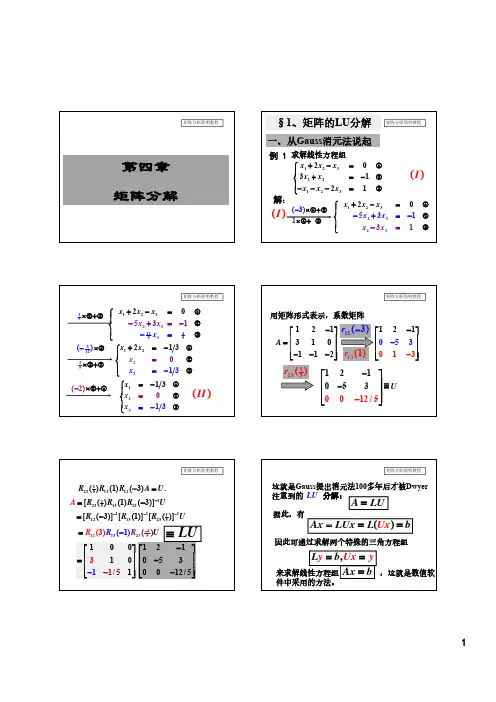
2. LU分解LU分解是将一个矩阵分解为下三角矩阵L和上三角矩阵U的乘积的过程。
LU分解的主要应用是求解线性方程组和矩阵的逆。
通过LU分解,我们可以将线性方程组的求解过程简化为两个方程组的求解,从而提高计算效率。
3. QR分解QR分解是将一个矩阵分解为正交矩阵Q和上三角矩阵R的乘积的过程。
QR分解的主要应用是求解最小二乘问题和计算矩阵的特征值。
通过QR分解,我们可以将最小二乘问题转化为最小化上三角矩阵R的问题,从而简化求解过程。
4. 奇异值分解(SVD)奇异值分解是将一个矩阵分解为三个矩阵的乘积的过程,即将矩阵A分解为U、Σ和V的乘积。
其中,U和V是正交矩阵,Σ是一个对角矩阵。
SVD 的主要应用是降维和推荐系统。
通过SVD,我们可以将高维矩阵降低到低维空间,从而简化计算和提高推荐系统的准确性。
5. 特征值分解特征值分解是将一个方阵分解为特征向量和特征值的乘积的过程。
特征值分解的主要应用是计算矩阵的幂和对角化。
通过特征值分解,我们可以将矩阵的幂运算简化为特征值的幂运算,从而提高计算效率和准确性。
总结:矩阵分解是一种将矩阵拆解为更简单结构的方法,可以简化矩阵的计算和应用过程。
不同的矩阵分解方法适用于不同的应用场景,如LU分解适用于线性方程组的求解,QR分解适用于最小二乘问题的求解,SVD适用于降维和推荐系统,特征值分解适用于幂运算和对角化。
矩阵分解在数学、工程、计算机科学等领域有着广泛的应用,对于提高计算效率和准确性起到了重要的作用。
矩阵分析引论第四版课后练习题含答案简介《矩阵分析引论》是矩阵分析领域的经典教材之一,已经发行了四个版本。
该书主要以线性代数、矩阵理论和应用为主要内容,重点介绍了矩阵分析的基本概念、原理和应用。
本文主要介绍该书第四版中的课后练习题及其答案。
提供的资料本文为矩阵分析引论第四版课后练习题及其答案,包含了第一章到第五章的所有习题和答案。
其中,习题从简单到复杂,大部分习题都有详细的解答过程和答案。
内容概述第一章引言第一章主要介绍了矩阵分析的历史和基本概念、性质、符号等。
本章习题主要涉及了矩阵、向量、矩阵运算等基本概念和性质。
第二章基本概念和变换第二章主要介绍了线性变换的基本概念和性质,以及线性代数中的一些重要定理和定理的证明。
本章习题主要涉及了线性变换、矩阵的秩和标准型、特征值和特征向量等内容。
第三章矩阵运算第三章主要介绍了矩阵运算的基本概念和性质,包括矩阵乘法、逆矩阵、行列式等。
本章习题主要涉及矩阵运算的基本操作和应用。
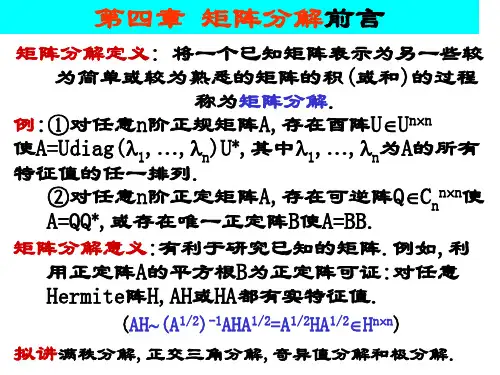
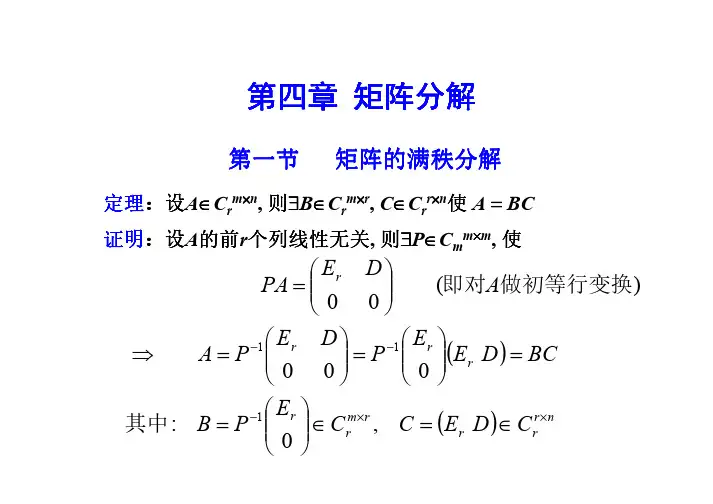
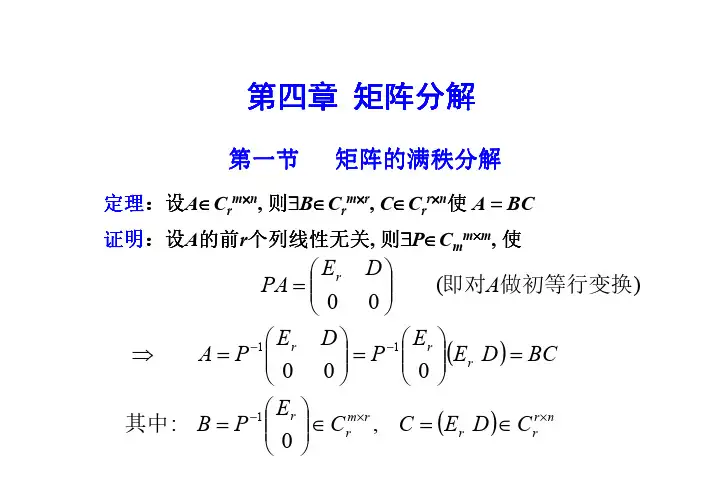
第四章矩阵分解第四章主要介绍了矩阵分解的基本概念和应用,包括特征值分解、奇异值分解、QR分解等。
本章习题主要涉及了矩阵特征值和特征向量、矩阵的奇异值分解等内容。
第五章线性方程组和特征值问题第五章主要介绍了解线性方程组和求特征值的方法,包括高斯消元法、LU分解、带状矩阵、雅可比迭代等。
本章习题主要涉及了线性方程组的解法、矩阵的特征值问题等内容。
结语本文介绍了矩阵分析引论第四版课后练习题及其答案。
对于学习矩阵分析的同学,课后习题是一个非常重要的练习和提升自己能力的途径。
本文所提供的习题和答案可以帮助读者巩固和提高自己的矩阵分析能力。
同时,本文也希望能够帮助更多的人学习矩阵分析,并成为矩阵分析领域的专家。

现代控制理论讲义第四章矩阵范数和奇异值分解4.1 引言在这一讲中,我们将引入矩阵范数的概念。
之后会介绍矩阵的奇异值分解或者叫SVD。
SVD 揭示了矩阵的2范数,它的值意义更大:它使一大类矩阵扰动问题得以解决,同时也为后面稳定鲁棒性的概念打下基础;它还解决了所谓的完全最小二乘问题,该问题是我们前面讲的最小二乘问题的推广;还帮我们澄清在矩阵求逆计算中碰到的态性的概念。
在下一讲中,我们会花更大的篇幅来叙说SVD的应用。
例 4.1 为了提高大家对矩阵范数研究和应用的兴趣,我们首先从一个例子开始,该例子提出了与矩阵求逆有关的矩阵态性问题。
我们所感兴趣的问题是矩阵求逆对矩阵扰动的敏感程度。
考虑求下列矩阵的逆马上就可以求得现在我们假设对一个受到扰动的矩阵求逆求逆后,结果就成了在这里表示A中的扰动,表示中的扰动。
显然中一项的变化会导致中的变化。
如果我们解,其中,得到,加入扰动后,解得。
在这个结果中,我们仍然可以清楚的看到开始数据仅有的变化,却导致解产生的变化。
以上例子中我们看到的要比在标量情况下差的多。
如果是标量,那么,所以的倒数中小数部分的变化和的变化在同一量级上。
因此,在上例中的现象完全是在矩阵的时候才出现的。
看上去好像和是近似奇异的事实有关——因为它的列几乎不独立,且它的行列式值要比它的最大元素小很多,等等。
随后(见下一讲),我们会找到衡量奇异程度的合理方法,同时还要说明在求逆情况下,这种方法和灵敏度的关系如何。
在理解这种灵敏度和扰动的细节关系之前,我们首先要找到度量向量和矩阵量级的方法。
在第一讲中我们已经引入了向量范数的概念,所以我们现在来看一下矩阵范数的定义。
4.2 矩阵范数一个维复数矩阵可以看成(有限维)赋范向量空间中的一个算子:其中,这里的范数指的是标准欧氏范数。
定义的归纳2-范数如下:术语“归纳”是指在向量和的范数的基础上,使得以上矩阵范数的定义有意义。
该定义中,归纳范数表示矩阵在中单位圆上向量扩大的倍数,也就是说,它表示矩阵的增益。
高等代数课件(北大版)第四章矩阵第一节:矩阵的概念及基本运算矩阵是现代数学的重要基础,是线性代数理论的核心概念之一。
在数学和应用领域有着重要的应用价值。
1.1 矩阵的定义定义1.1:矩阵是一个有规律的数表,其中的每一个数称为矩阵的一个元素,通常用一个大写字母表示。
例如:$$A=\begin{pmatrix}a_{11} & a_{12} & a_{13} \\a_{21} & a_{22} & a_{23} \\a_{31} & a_{32} & a_{33}\end{pmatrix}$$其中 $a_{ij}$ 称为矩阵 $A$ 的第 $i$ 行第 $j$ 列元素。
1.2 矩阵的基本运算1.2.1 矩阵的加法定义1.2:设 $A=(a_{ij})_{m \times n},B=(b_{ij})_{m \times n}$,则其和 $C=A+B$ 定义为矩阵 $C$ 的元素为 $c_{ij}=a_{ij}+b_{ij}$。
例如:$$A=\begin{pmatrix}1 &2 &3 \\4 &5 &6 \\7 & 8 & 9\end{pmatrix},B=\begin{pmatrix}-1 & -2 & -3 \\-4 & -5 & -6 \\-7 & -8 & -9\end{pmatrix},$$则 $C=A+B$ 得:$$C=\begin{pmatrix}0 & 0 & 0 \\0 & 0 & 0 \\0 & 0 & 0\end{pmatrix}$$1.2.2 矩阵的数乘定义1.3:设 $A=(a_{ij})_{m \times n}$,$k \in K$,则矩阵 $kA$ 定义为矩阵 $kA$ 的元素为 $ka_{ij}$。
第一节 正规矩阵【Schur 三角化定理】设n nA ⨯∈,则存在酉矩阵U ,使*U AU B =,其中B 为一个上三角矩阵.【酉矩阵】n 阶复方阵U 的n 个列向量是U 空间的一个标准正交基.1H H H n U U UU E U U -==⇔=性质:设有矩阵A ,B ,则(1)若A 是酉矩阵,则1A -也是酉矩阵;(2)若A ,B 是酉矩阵,则AB 及BA 也是酉矩阵;(3)若A 是酉矩阵,则|det()|1A =;(4)A 是酉矩阵⇔A 的n 个列向量是两两正交的单位向量. 【定理4.1.1】矩阵A 可以酉对角化⇔**AA A A =.*U AU T =是上三角矩阵,*********()()AA UTU UTU UTU UT U UTT U === *********()()A A UTU UTU UT U UTU UT TU ===,故****A A AA T T TT =⇔=A 可以酉对角化,则∃酉矩阵U 使*U AU D =***************()()()()AA U DU U DU U DUU D U U DD UU D DU U DU U DU A A ======【定义4.1.1】设n nA ⨯∈,若**AA A A =,则称A 是正规矩阵.【引理4.1.1】设A 为正规矩阵,若A 又为三角矩阵,则A 为对角矩阵. 【定理4.1.2】设n nA ⨯∈,则A 为正规矩阵⇔A 有n 个两两正交的单位特征向量.【推论4.1.1】正规矩阵属于不同特征值的特征向量是两两正交的.【定理4.1.3】设()i j n n A a ⨯=是复矩阵,1λ,2λ,……,n λ为A 的n 个特征值,则 (1)(Schur 不等式)221,1||||n nii ji i j aλ==≤∑∑(2)A 为正规矩阵⇔221,1||||nni i j i i j a λ===∑∑(3)*2,,1tr()||ni ji j AA a==∑【推论】设A 为正规矩阵且幂零,则0A =.【定义4.1.2】设a 与b 是实数,且0b ≠,则称二阶实矩阵a b b a ⎛⎫ ⎪-⎝⎭为一个Schur 型. 【定理4.1.4】(实正规矩阵)设A 是n 阶实矩阵,则A 是正规矩阵⇔存在正交矩阵Q 使得12T s Q AQ A A A =⊕⊕⊕其中每个i A 或者是一阶实矩阵,或者是一个Schur 型. 【推论4.1.2】设A 是n 阶实矩阵.(1)A 是对称矩阵⇔存在正交矩阵Q ,使得T Q AQ 是对角矩阵; (2)A 是反对称矩阵⇔存在正交矩阵Q ,使得120T s Q AQ A A A =⊕⊕⊕⊕其中每个00i i i b A b ⎛⎫= ⎪-⎝⎭,从而反对称矩阵的非零特征值为纯虚数;(3)A 是正交矩阵⇔存在正交矩阵Q ,使得12()T s t s Q AQ I I A A A =⊕-⊕⊕⊕⊕其中每个i A 是二阶Givens 旋转矩阵,从而正交矩阵的特征值的模均为1. 设B 是n 阶复矩阵.(4)B 是Hermite 矩阵⇔存在正交矩阵U ,使得T U BU 是实对角矩阵; (5)B 是反Hermite 矩阵⇔存在正交矩阵U ,使得T U BU 是纯虚数对角矩阵(即实部为0);(6)B 是酉矩阵⇔存在酉矩阵U ,使得T U BU 是对角元素的模均为1的对角矩阵,从而酉矩阵的特征值的模均为1;(7)Hermite 矩阵A 正定⇔A 的所有顺序主子式均大于0; 【引理4.1.2】Hermite 阵或实对称矩阵A 在某一个k 维子空间上正定⇔A 至少有k 个特征值(包括重数)大于零.第二节 正规矩阵的谱分解设A 是正规矩阵,则由定理4.1.1知,存在酉矩阵U 使得*12(,,,)n U AU diag λλλ=.因而*12(,,,)n A Udiag U λλλ=.令12(,,,)n U ααα=,则12*1*212****111222(,,,)n n n n n nA αλλααααλαλααλααλαα⎛⎫⎛⎫ ⎪⎪ ⎪ ⎪= ⎪⎪ ⎪ ⎪ ⎪⎝⎭⎝⎭=+++ (4.2.1)由于12,,,n λλλ为A 的特征值,12,,,n ααα为A 对应的两两正交的单位特征向量,故式(4.2.1)称为正规矩阵A 的谱分解或特征(值)分解。
矩阵分解公式摘要:一、矩阵分解公式简介1.矩阵分解的定义2.矩阵分解的意义二、矩阵分解的几种方法1.奇异值分解(SVD)2.谱分解(eigenvalue decomposition)3.非负矩阵分解(NMF)三、矩阵分解在实际应用中的案例1.图像处理2.信号处理3.数据降维四、矩阵分解的发展趋势和挑战1.高维数据的处理2.矩阵分解算法的优化3.新型矩阵分解方法的研究正文:矩阵分解公式是线性代数中一个重要的概念,它涉及到矩阵的诸多操作,如矩阵的乘法、求逆、迹等。
矩阵分解的意义在于将一个复杂的矩阵简化为易于处理的形式,从而便于进行矩阵运算和数据分析。
本文将介绍几种常见的矩阵分解方法,并探讨它们在实际应用中的案例和发展趋势。
首先,我们来了解一下矩阵分解的定义。
设A是一个m×n的矩阵,矩阵分解就是将A表示为若干个矩阵的乘积,即A = UΣV*,其中U是m×m的酉矩阵(满足UU* = I),Σ是m×n的非负实对角矩阵,对角线上的元素称为奇异值,V是n×n的酉矩阵(满足VV* = I),V*是V的共轭转置。
通过矩阵分解,我们可以得到矩阵A的秩、奇异值、特征值等信息。
矩阵分解有多种方法,其中较为常见的有奇异值分解(SVD)、谱分解(eigenvalue decomposition)和非负矩阵分解(NMF)。
奇异值分解是将矩阵A分解为三个矩阵的乘积:UΣV*,其中U和V是酉矩阵,Σ是对角矩阵。
谱分解是将矩阵A分解为两个矩阵的乘积:A = UΣV*,其中U和V是酉矩阵,Σ是对角矩阵,对角线上的元素是矩阵A的特征值。
非负矩阵分解是将矩阵A分解为两个非负矩阵的乘积:A = WH,其中W和H都是非负矩阵。
矩阵分解在实际应用中有着广泛的应用,尤其在图像处理、信号处理和数据降维等领域。
在图像处理中,矩阵分解可以用于图像压缩、去噪和特征提取等任务。
在信号处理中,矩阵分解可以用于信号降噪、特征提取和频谱分析等任务。
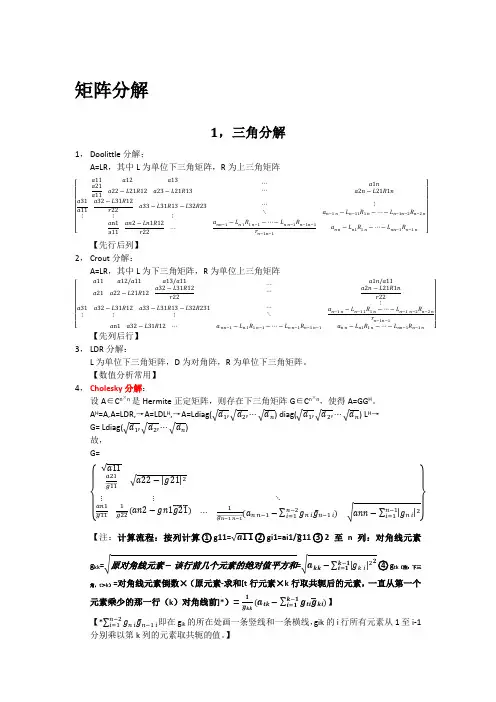
第四章 矩阵的分解将矩阵分解为具有某种特性的因子之积,从以我们所熟悉的Gauss 消去法为依据而导出的LU 分解,到上个世纪60、70年代以Givens 和Householder 变换发展起来的QR 分解,在矩阵理论的研究与应用中都具有十分重要的意义。
这些特殊的分解式一方面反映了原矩阵的某些数值特征,另一方面,分解的方法与过程也为某些数值计算方法和理论分析提供了有效的工具。
§4.1n 阶矩阵的三角分解和LU 分解在线性代数中我们已经学过应用Gauss 消去法求解n 元线性方程组b Ax =, 其中:()nn ija A ⨯=,()Tn x x x x ,,,21 =,()Tn b b b b ,,,21 =。
Gauss 消去法的基本思路是将系数矩阵化为上三角形矩阵,或将增广矩阵化为上阶梯形矩阵,而后回代求解。
现在应用所谓选主元素法来实施Gauss 消去法的消去过程,至于回代过程我们不做讨论。
设()A A =0,记A 的k 阶顺序主子式为k ∆()n k ,,2,1 =。
如果()00111≠=∆a ,令()()011011a a c i i = ()n i ,,3,2 =,构造Frobenius 矩阵:⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=11121211 n n c c c L ,⎪⎪⎪⎪⎪⎭⎫⎝⎛---=-111212111 n n c c c L则()()()()()()()()()1002020220101201101100A a a a a a a a AL nn n n n =⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=- (4.1.1) 因此,在()0A的第一列中除主元素()011a 外,其余元素均被化为零。
式(4.1.1)即为()()110A L A =,由于倍加变换不改变矩阵行列式的值,所以由()1A 得到A 的二阶顺序主子式为()()1220112a a =∆。
如果()()01220112≠=∆a a ,则必有()0122≠a 。