第十三章 控制系统工具箱
- 格式:pdf
- 大小:434.03 KB
- 文档页数:9
![一种智能工具箱的控制系统[发明专利]](https://uimg.taocdn.com/0253f5eaac51f01dc281e53a580216fc700a5339.webp)
(19)中华人民共和国国家知识产权局(12)发明专利申请(10)申请公布号 (43)申请公布日 (21)申请号 201711022238.4(22)申请日 2017.10.27(71)申请人 贵州医科大学地址 550001 贵州省贵阳市云岩区北京路9号贵州医科大学(72)发明人 汪家文 黄江 王杰 夏冰 万昌武 刘芳 (74)专利代理机构 北京酷爱智慧知识产权代理有限公司 11514代理人 安娜(51)Int.Cl.G05B 19/042(2006.01)G01G 19/52(2006.01)G01D 21/02(2006.01)A61L 2/10(2006.01)(54)发明名称一种智能工具箱的控制系统(57)摘要本发明公开了一种智能工具箱的控制系统,所述控制系统包括:主控模块,工具检测模块,自动开关抽屉模块,消毒模块,电源模块;主控模块分别与工具检测模块、自动开关抽屉模块、消毒模块连接,所述电源模块分别与主控模块、工具检测模块、自动开关抽屉模块、消毒模块。
本发明可以实现抽屉的自动打开和关闭,自动检测每一个工具或器械的归位情况,并能够自动消毒对工具箱进行消毒。
权利要求书1页 说明书5页 附图13页CN 107656480 A 2018.02.02C N 107656480A1.一种智能工具箱的控制系统,其特征在于,所述控制系统包括:主控模块,工具检测模块,自动开关抽屉模块,消毒模块,电源模块;主控模块分别与工具检测模块、自动开关抽屉模块、消毒模块连接,所述电源模块分别与主控模块、工具检测模块、自动开关抽屉模块、消毒模块;所述主控模块,用于对工具检测模块、自动开关抽屉模块、消毒模块进行数据采集和控制;所述工具检测模块,用于检测工具的归位情况;所述自动开关抽屉模块,用于实现抽屉的自动开关,并指示抽屉的动作和状态;所述消毒模块,用于在抽屉关闭后对工具箱进行消毒;所述电源模块,用于为主控模块、工具检测模块、自动开关抽屉模块、消毒模块供电。
控制系统校正工具在现代工业中,控制系统是保证生产运行正常的重要组成部分。
然而,由于各种因素的干扰,控制系统难免会出现误差,因此需要进行校正以提高系统的准确性和稳定性。
为了解决这个问题,各种控制系统校正工具应运而生。
一、什么是控制系统校正工具?控制系统校正工具是为了确保控制系统运行准确和稳定而设计的设备或软件。
它可以对控制系统的传感器、执行器和控制器进行校准和调整,以确保其输出与期望值相匹配。
控制系统校正工具通常包括以下几个方面的内容:1. 传感器校正工具:用于调整传感器的灵敏度、补偿温度漂移和消除误差,确保传感器输出准确可靠。
2. 执行器校正工具:用于校准执行器的控制范围、响应速度和动作精度,提高执行器的控制精度和工作效率。
3. 控制器校正工具:用于调整控制器的参数和工作模式,优化控制系统的稳定性和响应速度。
二、控制系统校正工具的应用领域控制系统校正工具广泛应用于各个领域,涵盖了许多不同的行业和应用场景。
以下是几个主要的应用领域:1. 工业自动化:在生产线、工厂或仪表控制系统中,控制系统校正工具可以帮助工程师对各种传感器和执行器进行准确校准,确保生产过程的稳定性和产品质量的一致性。
2. 医疗设备:在医疗器械和医疗仪器中,控制系统校正工具可以用于校准血压计、体温计等传感器设备,确保医疗数据的准确性,提高医疗诊断和治疗的效果。
3. 能源管理:在能源管理系统中,控制系统校正工具可以用于校准压力传感器、流量计等仪表设备,确保能源流程的稳定和测量数据的可靠性,提高能源利用效率。
4. 航空航天:在飞行控制系统中,控制系统校正工具可以对飞行器的姿态传感器和推力调节系统进行校准,确保飞行器的安全稳定。
三、控制系统校正工具的优势和挑战控制系统校正工具的使用具有很多优势,带来了诸多便利:1. 提高准确性:通过校准工具对控制系统进行校正,可以大大提高系统的准确性和精度,确保输出结果与期望值尽可能一致。
2. 保证稳定性:校准工具可以对控制系统的参数和工作模式进行调整,从而提高系统的稳定性和响应速度,减少误差和振荡。
自动控制原理目录模板前言
1. 简介
2. 目的与意义
第一章自动控制系统基础
1. 传感器与执行器
1.1 传感器概述
1.2 执行器概述
2. 控制系统的要素
2.1 反馈控制与前馈控制
2.2 控制误差与修正
3. 自动控制系统的分类
3.1 开环控制系统
3.2 闭环控制系统
3.3 连续控制系统与离散控制系统
第二章自动控制原理
1. 控制算法
1.1 比例控制算法
1.2 比例-积分控制算法
1.3 比例-微分控制算法
1.4 PID控制算法
2. 系统建模
2.1 传递函数模型
2.2 状态空间模型
2.3 信号流图
3. 控制器设计
3.1 根轨迹法
3.2 频域法
3.3 状态空间法
第三章自动控制系统应用
1. 温度控制系统
1.1 温度传感器介绍
1.2 温度控制器选择与参数调节方法
2. 液位控制系统
2.1 液位测量方法
2.2 液位控制器选择与参数调节方法
3. 速度控制系统
3.1 速度传感器介绍
3.2 速度控制器选择与参数调节方法
结论
1. 自动控制原理的重要性
2. 对自动控制系统应用的总结
参考文献
附录
1. 传感器与执行器的详细说明
2. 控制系统的数学模型推导
3. 控制器设计案例分析
以上是根据题目"自动控制原理目录模板"编写的目录,根据此目录模板可以细化撰写文章的各个章节内容。
控制设计工具箱
佚名
【期刊名称】《《现代制造》》
【年(卷),期】2009(000)029
【摘要】MLS风轮机控制设计(WTCD)工具箱是一套建立在MATLAB基础上的软件开发和分析工具组。
其包含多种建模,设计和分析工具,旨在帮助工程师迅速处理所有和控制设计、控制器的性能评价和载荷计算相关的任务。
【总页数】1页(P41)
【正文语种】中文
【中图分类】TP317.4
【相关文献】
1.MATLAB 的数据采集工具箱--一种与硬件设备通讯的新工具箱 [J], 法林;陈文辉;董大群
2.MATLAB工具箱Sisotool工具箱在控制系统补偿器中的应用 [J], 王晓东;张岳
3.MATLAB下GA工具箱和ANN工具箱联合使用的实现技术 [J], 申伟科;钟理;李伍举
4.系统维护工具箱——魔豆精灵眩光工具箱 [J],
5.NI LabVIEW 新添控制设计和仿真工具套件——新型交互式控制设计工具包为开发实时控制系统提供解决方案 [J],
因版权原因,仅展示原文概要,查看原文内容请购买。
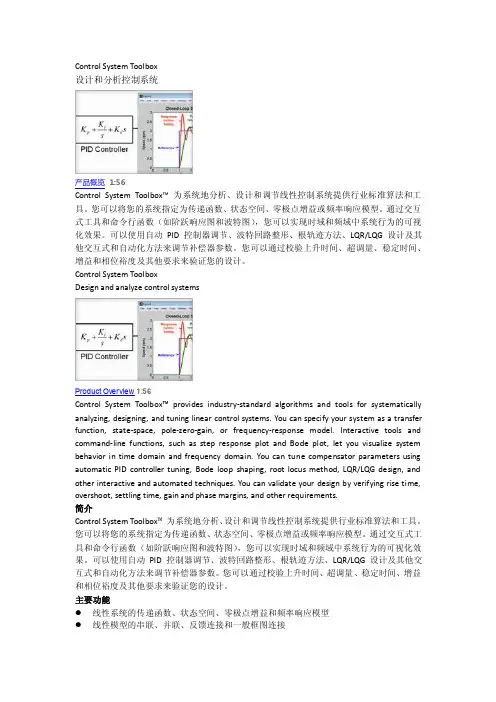
Control System Toolbox设计和分析控制系统产品概览1:56Control System Toolbox™为系统地分析、设计和调节线性控制系统提供行业标准算法和工具。
您可以将您的系统指定为传递函数、状态空间、零极点增益或频率响应模型。
通过交互式工具和命令行函数(如阶跃响应图和波特图),您可以实现时域和频域中系统行为的可视化效果。
可以使用自动PID 控制器调节、波特回路整形、根轨迹方法、LQR/LQG 设计及其他交互式和自动化方法来调节补偿器参数。
您可以通过校验上升时间、超调量、稳定时间、增益和相位裕度及其他要求来验证您的设计。
Control System ToolboxDesign and analyze control systemsProduct Overview1:56Control System Toolbox™ provides industry-standard algorithms and tools for systematically analyzing, designing, and tuning linear control systems. You can specify your system as a transfer function, state-space, pole-zero-gain, or frequency-response model. Interactive tools and command-line functions, such as step response plot and Bode plot, let you visualize system behavior in time domain and frequency domain. You can tune compensator parameters using automatic PID controller tuning, Bode loop shaping, root locus method, LQR/LQG design, and other interactive and automated techniques. You can validate your design by verifying rise time, overshoot, settling time, gain and phase margins, and other requirements.简介Control System Toolbox™为系统地分析、设计和调节线性控制系统提供行业标准算法和工具。
Matlab控制系统仿真工具箱的高级应用指南控制系统是现代工程中的关键部分之一,它用于设计和优化各种机械、电子和工业过程的自动化系统。
为了开发、分析和验证这些控制系统,Matlab提供了一个功能强大且灵活的控制系统仿真工具箱。
本文将介绍Matlab控制系统仿真工具箱的高级应用,并探讨如何使用这些工具进行系统建模、控制器设计和性能评估。
一、系统建模在使用Matlab控制系统仿真工具箱之前,我们需要先建立一个准确的系统模型。
系统建模是指将实际系统的物理过程和数学方程转化为Matlab可以处理的形式。
在建模过程中,我们需要确定系统的输入、输出和参数,以及系统动态方程的形式。
Matlab提供了多种建模方法,包括传递函数、状态空间和零极点等。
其中,传递函数是最常用的建模方法,特别适用于线性系统。
如果系统较为复杂或包含非线性元素,可以使用状态空间建模方法。
二、控制器设计在建立了系统模型之后,我们可以进行控制器的设计。
控制器是用来改变系统的输入信号以实现所需系统响应的装置。
在Matlab控制系统仿真工具箱中,有多种控制器设计方法可供选择。
最常用的控制器设计方法之一是PID控制器。
PID控制器由比例、积分和微分三个分量组成,可以实现系统的快速响应和准确跟踪。
在Matlab中,我们可以使用pidtune函数来自动调整PID控制器的参数,以满足系统的性能要求。
除了PID控制器,Matlab还提供了其他高级控制器设计方法,如模糊控制、自适应控制和预测控制等。
这些方法在处理非线性系统、时变系统或多变量系统时特别有效。
三、系统性能评估完成控制器设计后,我们需要对系统的性能进行评估。
系统性能评估是为了验证控制器设计是否达到了预期的目标。
在Matlab控制系统仿真工具箱中,有多种评估性能的方法可供选择。
最常用的性能指标之一是系统的稳态误差。
稳态误差是指系统在无穷大时间后与期望输出之间的差距。
Matlab提供了step函数来绘制系统的阶跃响应,并计算稳态误差。
八.控制系统工具箱系统常用的数学模型有:传递函数模型,状态方程模型,零极点增益模型,部分分式模型;(1) 传递函数描述系统在MATLAB 中可以方便地由分子和分母系数构成的两个向量唯一地确定出来,这两个向量分别用num 和den 表示。
num=[b1,b2,…,bm,bm+1]den=[a1,a2,…,an,an+1]调用格式:G=tf(num,den)注意:它们都是按s 的降幂进行排列的。
num=[12,24,0,20];den=[2 4 6 2 2];G=tf(num,den)num=4*conv([1,2],conv([1,6,6],[1,6,6]));den=conv([1,0],conv([1,1],conv([1,1],conv([1,1],[1,3,2,5]))));G=tf(num,den)(1)G.variable='p'Transfer function:4 p^5 + 56 p^4 + 288 p^3 + 672 p^2 + 720 p + 288-----------------------------------------------------p^7 + 6 p^6 + 14 p^5 + 21 p^4 + 24 p^3 + 17 p^2 + 5 pG.td=0.5Transfer function:4 p^5 + 56 p^4 + 288 p^3 + 672 p^2 + 720 p + 288exp(-0.5*p) * -----------------------------------------------------p^7 + 6 p^6 + 14 p^5 + 21 p^4 + 24 p^3 + 17 p^2 + 5 p(2)G=tf(num,den,'inputdelay',0.5)Transfer function:4 s^5 + 56 s^4 + 288 s^3 + 672 s^2 + 720 s + 288exp(-0.5*s) * -----------------------------------------------------s^7 + 6 s^6 + 14 s^5 + 21 s^4 + 24 s^3 + 17 s^2 + 5 s(3)set(G,'variable','s','Td',0.7)get(G)num: {[0 0 4 56 288 672 720 288]}den: {[1 6 14 21 24 17 5 0]}ioDelay: 0Variable: 's'Ts: 0InputDelay: 0.7OutputDelay: 0InputName: {''}22642202412)(23423++++++=s s s s s s s G )523()1()66)(2(4)(23322+++++++=s s s s s s s s s GOutputName: {''}InputGroup: [1x1 struct]OutputGroup: [1x1 struct]Name: ''Notes: {}UserData: [](2)零极点增益模型调用格式 G=zpk(z,p,k);结果是零极点形式的;函数tf2zp()可以用来求传递函数的零极点和增益:[z,p,k] = tf2zp(num,den)例 求零极点增益模型num=[1 11 30];den=[1 9 45 87 50];[z, p,k]=tf2zp(num,den);G=zpk(z,p,k)(3)部分分式展开 实际就是对residue 的应用 例 将tf 转化为部分分式的形式num=[2 0 9 1];den=[1 1 4 4 ];[r p k]=residue(num,den);[num den]=residue(r,p,k)num =2.0000 -0.0000 9.0000 1.0000den =1.0000 1.0000 4.0000 4.0000(4)状态空间描述B 的列数为输入的个数,C 的行数为输出的个数;D 的维数为C 的行*B 的列数 G=ss (A,B,C,D ); 例 可以看出: >> A=[1 6 9 10;3 12 6 8;4 7 9 11;5 12 13 14]; >> B=[4 6; 2 4; 2 2;1 0];>> C=[0 0 2 1;8 0 2 2]; >> D=zeros(2); >> G=ss(A,B,C,D)a =x1 x2 x3 x4x1 1 6 9 10x2 3 12 6 8x3 4 7 9 11x4 5 12 13 1450874593011)(23423++++++=s s s s s s s s G 44192)(233+++++=s s s s s s G DuCx y Bu Ax x+=+= x y u x x ⎥⎦⎤⎢⎣⎡=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=22081200012242641413125119748612310961b =u1 u2x1 4 6x2 2 4x3 2 2x4 1 0c =x1 x2 x3 x4y1 0 0 2 1y2 8 0 2 2d =u1 u2y1 0 0y2 0 0Continuous-time model.>> G=tf(G) 得到四个传递函数;分别为11;12;21;21(5)模型之间的相互转换模型转换的函数包括:residue :传递函数模型与部分分式模型互换ss2tf : 状态空间模型转换为传递函数模型ss2zp : 状态空间模型转换为零极点增益模型tf2ss : 传递函数模型转换为状态空间模型tf2zp : 传递函数模型转换为零极点增益模型zp2ss : 零极点增益模型转换为状态空间模型zp2tf : 零极点增益模型转换为传递函数模型也就是tf ss zpk 之间可以相互转化;举例说明:1. 状态空间模型:(单输入,单输出) A=[0 1;1 -2];B=[0;1];C=[1 3];D=1; G=ss(A,B,C ,D); [num,den]=ss2tf(A,B,C,D,[1])[Z P K]=ss2zp(A,B,C,D,[1]);2. 单入三出的模型的传递函数如下:(这里的分子和分母是矩阵)61162)(61165)(61162)()()(23231232123111++++=+++--=+++-==s s s ss s G s s s s s G s s s s u s y s Gnum=[0 0 -2;0 -1 -5 ;1 2 0];den=[ 1 6 11 6];[A B C D]=tf2ss(num,den);[]u x y u x x +=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡-=31102110>> g=tf(num,den)??? Error using ==> tf.tf at 239The values of the "num" and "den" properties must be rowvectors or cell arrays of row vectors, where each vectoris nonempty and containing numeric data. Type "ltipropstf" for more information.也就是tf 只能对行向量进行转化;可以直接G=ss(A,B,C,D);G=tf(G)生成多个传递函数3. 系统的零极点增益模型 )5)(2)(1()3(6)(++++=s s s s s G z=[-3];p=[-1 -2 -5];k=[6];g=zpk(z,p,k);[num,den]=zp2tf(z,p,k);[a,b,c,d]=zp2ss(z,p,k)4.模型的结构A 串联 G=G1*G2;B.并联G=G1+G1C.反馈G=feedback(G1,G2,SIGN);5.控制系统工具箱(控制系统的分析稳定性分析,时域分析,频域分析,根轨迹分析) LTI 对象有如下三种:ss 对象;tf 对象;zpk 对象;(1) 稳定性判据;判稳及找出是否为最小相角系统 例 a=[1 2 -1 2;2 6 3 0;4 7 -8 -5;7 2 1 6]; b=[-1;0 ;0;1]; c=[-2 5 6 1]; d=[7]; [z p k]=ss2zp(a,b,c,d); Ii=find(real(p)>0) %找出右半平面的极点下标,以列向量给出pzmap(p,z); %汇出系统的零极点图2.num=[3 16 41 28 ]; den=[1 14 110 528 1494 2117 112]; [z p k]=tf2zp(num,den);pzmap(p,z)(2) 时域分析求取系统单位阶跃响应:step()求取系统的脉冲响应:impulse() 本身就可以处理多输入,多输出的问题 求系统的稳态值 :dcgain(sys)Pole(G) zero(G) 以列向量形式返回极点和零点例101113220)(234++++=s s s s s G o 系统的开环传递函数,求单位反馈下的阶跃响应曲线。
自动控制原理教学之Matlab控制系统工具箱函数使用作者:陈凤祥来源:《教育教学论坛》2017年第03期摘要:论文根据一些现行自动控制原理教材中控制工具箱的使用情况,结合实际教学过程学生的疑问,完善了控制工具箱一些函数的使用方法:对tf/zpk对象属性的使用,解决了各类传递函数形式的准确显示;引入bodeplot函数,完善了非最小相位系统相频图绘制;引入sumblk/connect函数,解决了前馈+反馈系统结构的表达。
最后各类函数的使用均给出了相关示例。
关键词:自动控制;Matlab;控制系统工具箱中图分类号:G642.41 文献标志码:A 文章编号:1674-9324(2017)03-0204-03Matlab的Control System Toolbox(控制系统工具箱)提供了许多用于控制系统的仿真和分析的函数与模块,这给控制系统的仿真和控制器的设计带来了极大的方便。
对于相关的命令,不少现行教材[1,2]均有说明,但仅仅利用书上给定的命令,往往是不方便的,甚至无法实现一些教材中常见控制架构的仿真和分析。
如在Matlab中:(1)如何将一给定传递函数表示成形式4(见表1),以便于Bode图手工绘制;(2)如何准确绘制非最小相位系统的Bode 图;(3)如何将前馈+反馈的系统结构互联起来。
这些都是控制理论学习过程中常见的问题,但鲜有相关教材能针对这类问题给出相关的例子或者函数介绍。
在本科教学过程中,本人时有发现一些学生期望能够利用现成的Matlab命令用于解决上述三个问题。
为此下文根据这些问题给出了相应的解决方案。
一、传递函数表示在自动控制原理教材中[1,2],共有四种类型的传递函数表达形式(如表1所示),每种形式都是为了解决不同的控制问题所给出。
当前的教材在介绍Matlab控制系统工具箱函数时往往只介绍了传递函数形式1和形式2的表达方式,而比较重要的形式3,形式4则未曾给出,这导致很多学生还需用手工将形式2转化到形式3或4,从而感觉十分不便。
第十三章软件开发环境软件开发环境主要目标是提高软件生产率,改善软件质量和降低软件成本,而这些目标的实现只能依靠软件工具的广泛应用,所以软件工具是开发环境中最主要的组成部分。
本章内容的要点在于软件开发环境、软件工具及CASE等基本概念的了解。
13.1软件开发环境在软件工程学中,方法和工具是同一个问题的两个不同方面,方法是工具研制的先导,工具是方法的实在体现,软件工程方法的研究成果要最终实现为软件工具和系统,才能充分发挥软件工程方法在软件开发中的作用。
软件开发环境,就是围绕着软件开发的一定目标而组织在一起的相关一组软件工具的有机集合。
13.1.1软件开发环境概论1.什么是软件开发环境软件开发环境是指在计算机的基本软件的基础上,为了支持软件的开发而提供的一组工具软件系统。
一个由IEEE和ACM支持的国际工作小组提出的关于“软件开发环境”的定义是:“软件开发环境是相关的一组软件工具集合,它支持一定的软件开发方法或按照一定的软件开发模型组织而成”。
美国国防部在STARS计划中定义如下;“软件工程环境是一组方法、过程及计算机程序(计算机化的工具)的整体化构件,它支持从需求定义、程序生成直到维护的整个软件生存期”。
软件开发环境的定义可从三方面理解:(1)软件开发环境是一组相关工具的集合。
(2)这些相关工具按一定的开发方法或一定开发处理模型组织起来的。
(3)这些相关工具支持整个软件生存期的各阶段或部分阶段。
2.软件开发环境的发展在70年代,软件开发与设计方法由结构化程序设计技术(SP)向结构化设计(SD)技术发展,而后又发展了结构化分析技术的一整套的相互衔接的SA-SD的方法学。
在80年代中期与后期,主要是实时系统设计方法,以及面向对象的分析和设计方法的发展,它克服了结构化技术的缺点。
在90年代主要是进行系统集成方法和集成系统的研究,所研究的集成CSAE环境可以加快开发复杂信息系统的速度,确保用户软件开发成功,提高软件质量,降低投资成本和开发风险。
Control System Toolbox设计和分析控制系统产品概览1:56Control System Toolbox™为系统地分析、设计和调节线性控制系统提供行业标准算法和工具。
您可以将您的系统指定为传递函数、状态空间、零极点增益或频率响应模型。
通过交互式工具和命令行函数(如阶跃响应图和波特图),您可以实现时域和频域中系统行为的可视化效果。
可以使用自动PID 控制器调节、波特回路整形、根轨迹方法、LQR/LQG 设计及其他交互式和自动化方法来调节补偿器参数。
您可以通过校验上升时间、超调量、稳定时间、增益和相位裕度及其他要求来验证您的设计。
Control System ToolboxDesign and analyze control systemsProduct Overview1:56Control System Toolbox™ provides industry-standard algorithms and tools for systematically analyzing, designing, and tuning linear control systems. You can specify your system as a transfer function, state-space, pole-zero-gain, or frequency-response model. Interactive tools and command-line functions, such as step response plot and Bode plot, let you visualize system behavior in time domain and frequency domain. You can tune compensator parameters using automatic PID controller tuning, Bode loop shaping, root locus method, LQR/LQG design, and other interactive and automated techniques. You can validate your design by verifying rise time, overshoot, settling time, gain and phase margins, and other requirements.简介Control System Toolbox™为系统地分析、设计和调节线性控制系统提供行业标准算法和工具。