盾构机激光导向测量系统原理研究
- 格式:doc
- 大小:29.50 KB
- 文档页数:5

浅谈地铁盾构施工测量控制随着城市化进程的不断推进,地铁成为大多数城市公共交通的重要组成部分。
地铁的建设方式有多种,其中盾构施工技术的应用越来越普及。
盾构施工是一种高效、安全、环保的施工方式,在地铁建设中起到了重要作用。
然而,盾构施工的实施也需要进行测量控制,以确保施工的准确性和安全性。
一、盾构施工的基本原理盾构施工是利用盾构机在地下开挖隧道,施工过程中需要控制盾构机的前进方向、水平位置、高度和姿态等参数,以确保施工的准确性和安全性。
一般来说,盾构机的控制是基于激光测距、GPS定位、惯性导航等技术实现的。
其中,激光测距技术被广泛应用于盾构施工中,通过在隧道内设置一定数量的反射板和激光探头,实现对盾构机位置和姿态的准确测量。
盾构施工的测量控制是保证施工准确性和安全性的基础工作。
盾构施工的测量控制主要包括三个方面:前方探测、导向系统和盾构机机身控制。
1. 前方探测前方探测是盾构施工中最为重要的环节之一,通常采用激光测距的方式完成。
前方探测即指对盾构机前方的掘进面进行测量控制,以保证盾构机的前进方向和姿态的准确性。
前方探测系统包括激光探头、反射板以及控制系统。
在施工前需要先在盾构机前方设置一定数量的反射板,然后在探头和参考平面之间发射激光,通过激光探测和反射板的反射,计算出盾构机前方的距离和位置,再通过控制系统控制盾构机的前进方向和姿态,以确保盾构机准确掘进。
2. 导向系统导向系统是盾构施工中另一个重要的环节,通过导向系统,可以保证盾构机沿着设计线路掘进,避免偏离和偏移。
导向系统通常包括传感器、控制系统和电动执行器等组件。
传感器可以实时测量盾构机的位置和姿态信息,并将数据发送到控制系统。
控制系统通过处理传感器数据,控制电动执行器的转动,实现盾构机的精确定位和导向。
3. 盾构机机身控制盾构机机身控制是盾构施工中最基本的一环,确保盾构机的前进和掘进位置的准确定位,同时还可以实现其他功能,如掘进速度控制、盾构机的转向、后备推进等。


盾构机激光导向测量系统原理研究盾构机激光导向测量系统原理研究摘要:以我公司在某工程使用的海瑞克S481盾构机为例,介绍该盾构机配套的激光导向测量系统的组成,探讨该激光导向系统的工作过程,从测绘学角度,研究该激光导向系统的工作原理。
关键字:盾构施工盾构机导向测量系统姿态中图分类号:V556文献标识码: A引言目前,盾构法已成为我国隧道施工的一种主要方法,包括地铁隧道,电缆隧道,大的输水隧洞,伴随着激光、计算机及自动控制等技术的发展成熟,激光导向测量系统得到成功运用和发展。
我国盾构施工技术自20世纪50、60年代引进以来,在许多领域有了进步和发展,但在激光导向系统方面,尤其是测绘学原理方面研究不深,在一定程度上影响了盾构施工对隧洞中心轴线控制,而且对我国自行研发也不利。
全面理解激光导向系统的测量原理,有助于工程技术人员在盾构施工中解决问题,保证隧道中心轴线和准确贯通。
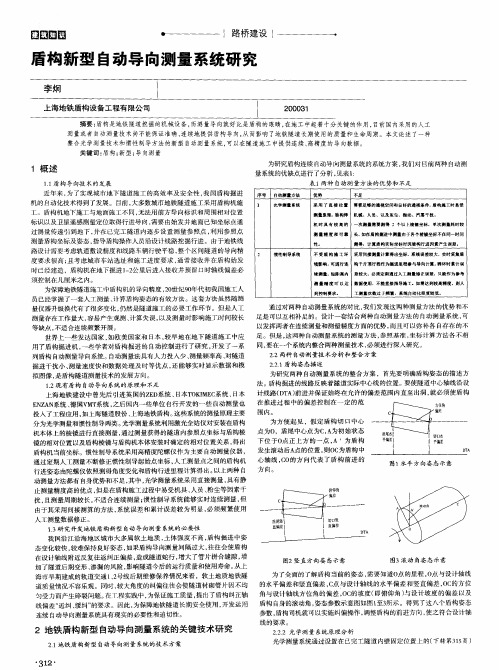
1、盾构机激光导向系统组成及其作用激光导向系统是综合运用测绘技术、激光传感技术、计算机应用技术以及机械电子等技术指导盾构施工的独立运行体系,它主要由:(1)激光全站仪(激光发射和接收源、距离和角度量测设备)和黄盒子(信号传输和供电装置,共2个);(2)激光接收靶(内置光栅和横、竖向测斜仪)和小棱镜;(3)主控室的中继箱、工业电脑(包括安装的软件)、PLC;(4)油缸伸长量测量装置等。
海瑞克盾构机激光导向系统核心是VMT测量系统软件。
在整个盾构施工过程中,激光导线测量系统起着非常重要的作用,它比作盾构机的“眼睛”,如下图2-1盾构施工基本过程图所示,盾构机激光导向系统贯穿整个盾构施工过程:在测量系统工业电脑上动态显示盾构机轴线相对于隧道设计轴线的偏差,指导盾构司机根据显示盾构姿态,调整推进参数,使盾构机沿着隧道设计轴线掘进;获取各环掘进姿态,输入相应数据,自动科学计算管片封顶块拼装位置,指导管片拼装。
输入设计图纸给定的隧洞轴线设计元素,自动计算隧道的理论设计中心轴线;导向系统自带远程数据传输功能,和地面监控室电脑相连,对盾构机的掘进姿态和相关推进参数实施远程实时监控,并能储存每个时间段的数据,以利于以后的研究。


地铁盾构施工测量技术本文介紹了地铁盾构施工中的VMT导向系统、盾构姿态人工检测、管环检测等内容。
其中VMT导向系统的应用和维护以及经验教训还有盾构姿态人工检测和管环检测的经验和技巧是本文介绍的重点。
标签导向系统;盾构姿态;管环检测1 导向系统:1.1导向系统介绍1.1.1 VMT导向系统概述:在掘进隧道的过程中,为了避免隧道掘进机(TBM)发生意外的运动及方向的突然改变, 必须对TBM的位置和DTA(隧道设计轴线)的相对位置关系进行持续地监控测量。
这就是TBM采用“导向系统”(SLS)的原因。
1.1.2 导向系统基本组成导向系统是由激光全站仪(TCA)、中央控制箱、ESL靶、黄盒子和计算机及掘进软件组成。
1.1.3 导向基本原理洞内控制导线是支持盾构机掘进导向定位的基础。
激光全站仪安装在位于盾构机的右上侧管片上的拖架上,后视一基准点(后视靶棱镜)定位后。
全站仪自动掉过方向来,收寻ELS靶,ELS接收入射的激光定向光束,即可获取激光站至ELS靶间的方位角、竖直角,通过ELS棱镜和激光全站仪就可以测量出激光站至ELS靶间的距离。
TBM的仰俯角和滚动角通过ELS靶内的倾斜计来测定。
ELS靶将各项测量数据传向主控计算机,计算机将所有测量数据汇总,就可以确定TBM在全球坐标系统中的精确位置。
将前后两个参考点的三维坐标与事先输入计算机的DTA(隧道设计轴线)比较,就可以显示盾构机的姿态了。
1.2 导向系统应用1.2.1 激光站人工移站盾构机的掘进时的姿态控制是通过全站仪的实时测设ELS的坐标,反算出盾构机盾首、盾尾的实际三维坐标,通过比较实测三维坐标与DTA三维坐标,从而得出盾构姿态参数。
随着盾构机的往前推进,每隔规定的距离就必须进行激光站的移站。
激光站的支架用角钢和钢板做成可以安装在管片螺栓的托架形似, 托架的底板采用400×400×10mm钢板,底板中心焊上仪器连接螺栓,长1㎝。
采取强制对中,减少仪器对中误差。

盾构导向系统原理探讨摘要:文章从组成、坐标系定义等方面对盾构隧道施工掘进的测量导向系统原理进行探讨。
关键词:盾构;测量;PPS导向1概况目前在我国盾构隧道掘进中所使用的导向软件有VMT、PPS、三菱以及国产的力信等。
其中PPS、三菱和力信的组成部分基本上一致,主要由棱镜、倾斜仪、带司服马达的全站仪、工业微机和数据交换装置组成,而VMT则多了一个激光靶。
所有导向系统的原理也都基本一致,且早期的VMT导向系统也是采用双棱镜的,文章仅围绕PPS系统的导向工作原理做探讨性说明。
(见图1)2PPS导向系统2.1各组成部分的作用各个组成部分作用如表1所示。
2.2坐标系的定义①大地坐标系(O-XYZ):简称地面坐标系,根据隧道中线设计而定,一般为地方坐标系。
洞内(外)控制点、测站点、后视点以及隧道中线坐标,均用该系坐标表示。
②盾构机坐标系(o-xyz):简称机械坐标系,在盾构机在水平放置且未发生旋转的情况下,以盾构机刀头中心前端切点为原点,以盾构机中心纵轴为x轴,由盾尾指向刀头为正向;以竖直向上的方向线为z轴,横轴y轴沿水平方向与x、z轴构成左手系。
盾构机坐标系是连同盾构机一起运动的独立直角坐标系。
盾构机尾部中心参考点、导向系统的微型棱镜等相对盾构机的位置都以此系坐标表示,这些坐标必须在盾构机出厂前精确测定。
③滚动角(roll):围绕盾构机中心纵轴(x轴)旋转产生的角度。
倾斜角(pitch):盾构机刀头中心相对于盾尾中心抬高或降低的角度。
(见图2)2.3PPS导向原理在掘进过程中,导向系统按如下流程工作:由系统控制全站仪实时测定盾构机上两个微型棱镜的三维坐标(大地坐标);利用安装在两棱镜之间的倾斜仪测得盾构机倾斜角和滚动角。
通过工业微机上安装的导向软件计算出当前的盾构机刀头、盾尾相对于设计线路的位置并用图形界面显示出来(见图3)。
如此反复进行,指导盾构机向前推进。
PPS的导向工作是如何实现的呢?首先,盾构机在出厂前已经将导向棱镜与刀头、盾尾的关系确定了(即机械坐标、夹角和距离);其次,盾构机在实际掘进中是会发生滚动和倾斜的,那么就需要通过倾斜仪将这种角度变化精确测量出来,有了滚动和倾斜角后就可以对导向棱镜的盾构机坐标(机械坐标)进行滚动、倾斜改正,改正完后再重新计算出它们与盾构机刀头、盾尾的关系;最后,通过全站仪测得两导向棱镜的大地坐标,利用它们与盾构机刀头、盾尾的关系即可推算出刀头和盾尾的大地坐标,再通过与设计隧道中心轴线的比较就可得出盾构机刀头、盾尾的水平、垂直偏移量以及所对应的线路里程。



浅谈TBM激光导向系统的原理及施工中的偏差控制摘要:本文主要介绍激光导向系统的组成、特点及其原理,阐述了在掘进施工中偏差的原因、偏差的控制措施及最终贯通偏差的控制。
关键词:激光导向;TBM;偏差;控制网;贯通1.前言随着长隧洞和超长隧洞施工的需要,TBM在隧洞开挖中占据了主导地位。
TBM全称全断面岩石掘进机,采用了计算机控制、传感器、测量、通信技术等,是集机、光、电、气、液、传感、信息技术于一体的成套设备,具有自动化程度高的优点。
为了避免TBM掘进严重偏离轴线造成重大质量事故,控制掘进的方向成为了重中之重。
常规人工测量方法速度慢、精度低、易出错,无法满足TBM持续开挖的需要,因此激光导向系统作为一种新的施工测量方法完美替代了常规人工测量,大幅度减轻现场测量人员的劳动强度和工作压力,系统各部件规格及测量精度满足TBM施工测量要求。
2.激光导向系统的原理激光导向系统具有施工数据采集功能、TBM姿态管理功能、施工数据管理功能以及施工数据实时远传功能,操作简单、方便、易于维护。
2.1激光导向系统的特点(1)测量和计算TBM的位置,以图形和数字的方式直观显示;(2)自动检查全站仪定向偏差,激光靶偏差,确保测量值的准确性;(3)TBM推进姿态及过程中的资料采集;(4)通过标准的线形设计要素计算隧道设计轴线,隧道中线坐标计算更简单易行;2.2硬件组成TBM激光导向系统硬件部分由带自动马达的全站仪、后视棱镜、激光靶(也可用两颗前视棱镜)、无线电台、数据传输电缆、控制盒、系统计算机等组成。
2.3软件系统软件由语言开发,测量主界面以图形和数字结合的方式显示盾构机的姿态信息、系统各硬件的状态信息;每一次测量成功后信息都将被软件保存,可供后期校核分析。
2.4导向原理激光导向系统的目的在于提供TBM位置信息,包括航向、滚动角、俯仰角、里程等,显示TBM相对于隧道设计中线的偏差,用数字的形式显示在计算机上,指引TBM回到设计方向。


盾构导向系统横向比较1、比较的导向系统SLS-T 盾构导向系统(简称SLS-T ) MTG-T 盾构导向系统(简称MTG-T ) ROBOTEC 盾构导向系统(简称ROBOTEC ) ZED GLOBAL 盾构导向系统(简称ZED GLOBAL ) PPS 盾构导向系统(简称PPS ) RMS-D 盾构导向系统(简称RMS-D )2、关键技术1.1系统原理 1.1.1 激光靶系统图1激光靶偏航角测量示意图如图1所示,激光靶的关键技术是精确感应激光束与激光靶轴线间的偏航角度,激光靶集成有精密角度传感器,能精确测定激光靶的转动角及俯仰角。
1.1.2 棱镜系统图2棱镜技术原如图2所示,棱镜技术是通过测量安装在盾构机上的两个棱镜及盾构机的转动角,通过数学激光束激光靶偏航角激光靶轴线的方法计算盾构的位置姿态。
1.1.3 两种原理的差别安装1)、激光靶安装图3 激光靶安装激光靶系统在盾构机上仅需安装一个激光靶设备,易于安装、保护和维护。
2)、棱镜安装图4 棱镜安装除安装两个开关棱镜外,还需要安装一个角度传感器,共在盾构机上安装三个设备,每个设备需要供电及通讯。
通视状况1)、激光靶系统图5 激光靶通视状况激光靶系统具有较好的通视距离,可很好的应用于狭窄测量通道的盾构机及小型盾构机。
2)、棱镜系统图6 棱镜系统通视状况棱镜系统易发生棱镜被遮挡的情况,在狭窄测量通道的盾构机上应用受限,不能应用于小型盾构机。
测量精度及稳定性1)、激光靶系统方位角:0.25~0.5mm/m;俯仰角:0.18~0.5mm/m;转动角:0.18~0.5mm/m;位置:1mm测量结果稳定性:稳定。
2)、棱镜系统方位角:与棱镜之间的距离有关;俯仰角:0.18~0.5mm/m;转动角:0.18~0.5mm/m;测量结果稳定性:与棱镜安装位置有关。
图7 棱镜之间距离对测量精度的影响1.1.4激光靶导向系统SLS-T系统MTG-T系统ZED GLOBAL系统1.1.5 棱镜导向系统ROBOTEC系统PPS系统RMS-D系统1.2系统通讯1.2.1 无线通讯无线通讯是指系统的全站仪与工业PC间采用无线数传电台进行数据通讯。


TBM激光导向系统TBM激光导向系统(PPS)作业指导隧道掘进机(TBM)上均配有激光导向系统,用以精确地监测TBM 在掘进时的位置,提供TBM与隧道设计中线的偏差,以便操作者及时调整TBM掘进方向,使其精确的按隧道的设计方向掘进。
1、P PS激光导向系统的工作原理PPS激光导向测量以安装在边墙上的激光经纬仪/测距仪发出的激光为基准,接口单元使激光数据、距离、经纬仪的坐标(X、Y、H)与控制系统发生联系,并输出给控制单元。
当激光束照射到安装于TBM主机上的目标单元,目标单元测量出激光束与目标单元轴线的夹角在水平面和铅垂面上的投影角度、激光束照射到目标单元屏幕上的位置(X、Y)、目标单元的左右横向滚动角度、目标单元中的棱镜配合测距仪测出经纬仪到目标单元靶屏幕距离。
所有这些数据通过连接电缆传送到控制单元的主计算机中,根据输入控制单元的隧道设计轴线数据和激光经纬仪数据并考虑目标单元轴线与TBM主轴线之间的安装误差(此项误差用常规方法测验出并从控制单元输入)计算出TBM的当前位置(目标单元屏幕处TBM的各项数据),并计算出TBM刀盘中心与设计隧道轴线的X、Y差值,操纵人员就是根据这些数据来控制TBM的位置。
随着TBM的不断前移,控制单元与激光/经纬仪/测距仪之间的连接电缆不断放出,直到两者之间距离达到最大值250m,此时激光/经纬仪/测距仪及接口单元应重新前移安装。
PPS系统的洞内部分通过并调制解调器、中继单元与放置于洞外的计算机和打印机联系,在计算机上可显示从控制单元传来的各项数据,对TBM的位置进行临视,并记录各项数据。
2、T BM掘进方向测量和调整技术措施(1)为检验激光导向系统的正确性,可用常规方法测量主机的各项位置数据,算出目标单元里程处和刀盘中心(即预测位置处)与隧洞设计轴线的各项偏差,然后与控制单元上显示的各项数据相比较,允许误差如下:导向、仰视、滚向数据相差应在±1mm/m 以内,当前位置相差应在±1mm以内,预测位置相差应在±25mm以内。

第二十一章隧道掘进激光导向及掘进管理系统第一节激光导向系统随着科学技术得发展,激光导向技术已开始用于隧道掘进工程中。
其原理就就是利用有良好直线性光束得激光,投射到盾构里,使操纵者及时地了解盾构得偏离、偏转情况,并随时纠正顶进方向,保证施工质量,提高施工速度。
目前采用得导向系统主要有VMT、PPS、日本演算工坊三种。
一、激光导向系统得主要作用盾构在掘进中,由于地层阻力、刀盘切削反作用力及推进千斤顶作用力等得不均,使盾构偏离既定得中心,这在施工中就是不允许得。
盾构施工得激光导向系统得作用就是随时指出盾构得顶进方向,使司机能控制机器按预定得设计线路顶进。
(1) 可以通过隧道设计得几何元素计算出隧道得理论轴线。
(2) 通过测倾仪测量盾构机得滚动与俯仰角度并予以显示。
(3) 在显示屏上随时以图形直观显示盾构机轴线相对于隧道设计轴线得准确位置,便于操作者根据偏差随时调整盾构机掘进得姿态与位置,使盾构机得掘进轴线逼近隧道设计轴线。
(4) 掘进一环后,从盾构机PLC自动控制系统获得推进油缸得伸长量数值,依此计算出上一环管片得管环平面位置,输入盾尾间隙数据后,计算出这一环适合拼装得管片类型。
(5) 从数据库中可以查阅各环得掘进姿态及其她相关资料。
(6) 通过调制解调器与电话线与地面办公室得电脑建立联系,将盾构机掘进数据传输到地面,便于工程管理人员实时监控盾构机得掘进情况。
二、激光导向得工作原理将激光发生器固定在已成洞得洞壁上。
利用激光导向技术发射出来得直线光束,投射到盾构里得靶板上,再用某种支持系统,以一种简单易见得形式指出盾构顶进得方向。
激光测量线就是一束容易瞧见得明亮得红光束,投射到盾构内得塑料靶板上就是一个红光点。
司机根据激光投射得光点与靶上预先设计好得隧道中心线位置就是否相符来调整盾构上、下、左、右得位置。
设备以固定参考点激光器发出得光束为基准计算掘进机得位置。
知道掘进机得位置后就可以计算出与设计洞线得偏差。

盾构机激光导向系统原理0 引言:20世纪70年代以来,盾构掘进机施工技术有了新的飞跃。
伴随着激光、计算机以及自动控制等技术的发展成熟,激光导向系统在盾构机中逐渐得到成功运用、发展和完善。
激光导向系统,使得盾构法施工极大地提高了准确性、可靠性和自动化程度,从而被广泛应用于铁路、公路、市政、油气等专业领域。
全面理解激光导向系统的原理,有助于工程技术人员在地铁的盾构施工中及时发现问题,解决问题,保证隧道的正确掘进和最后贯通;有助于国产盾构机研制工作的开展。
1 盾构机和激光导向系统的组成1.1 盾构机的组成盾构机按推力方式可分为网格式、压气式、插板式以及土压式和水压式;按形状划分,除典型的矩形、单圆筒形外,近年来又出现了双圆、三圆及多圆等异构形。
它们的组成有一定差异。
其中,土压式单圆盾构机在我国应用比较普遍。
它主要由盾体(含刀盘等)、管片拼装机、排土机构、后配套设备、电气设备、数据采集系统、SLS-T激光导向系统及其他辅助设备组成。
1.2 激光导向系统的组成激光导向系统是综合运用测绘技术、激光传感技术、计算机技术以及机械电子等技术指导盾构隧道施工的有机体系。
其组成(见图1:激光全站仪(激光发射源和角度、距离及坐标量测设备)和黄盒子(信号传输和供电装置);激光接收靶(ELS Target,内置光栅和两把竖向测角仪)、棱镜(ELS Prism)和定向点(Reference Target);盾构机主控室(TBM Control Cabin):由程控计算机(预装隧道掘进软件,具有显示和操作面板)、控制盒、网络传输Modem和可编程逻辑控制器(PLC)四部分组成;油缸杆伸长量测量(Extension Measurement)装置等。
其中,隧道掘进软件是盾构机激光导向系统的核心。
2 激光导向系统和盾构机控制测量在盾构施工中的地位和作用地铁盾构法施工过程如图3所示。
在隧道掘进模式下,激光导向系统是实时动态监测和调整盾构机的掘进状态,保持盾构机沿设计隧道轴线前进的工具之一。


盾构机激光导向系统原理激光导向系统是盾构机中一种先进的导向系统,通过激光束进行导向和定位,能够准确地判断和修正盾构机的前进方向,提高隧道的建设速度和精度。
以下将详细介绍盾构机激光导向系统的原理。
1.激光器:激光导向系统采用激光器产生一束高亮度、单色、相干的激光束。
激光器通过激活外部介质使得能量得以集中并扩大,然后利用光学反射和折射原理将激光束集中并射出。
2.激光传输:激光束通过特殊的光纤传输到盾构机前端的激光头部。
在激光传输的过程中,需要保证激光的稳定度和能量的损耗。
3.激光头:激光头是激光导向系统的核心部件,将激光束精确地投射到工作面上。
激光头一般由激光器、光学透镜和控制电路组成。
激光头可以嵌入到盾构机的刀盘上,用于检测刀盘的位置和姿态信息。
4.探测器:激光导向系统还需要安装激光接收器以接收反射回来的激光信号。
接收器一般由光学组件和光电探测器组成。
当激光束射入地下隧道时,部分光线会被地下岩土反射回来,并通过激光接收器接收。
5.定位算法:激光导向系统利用接收到的反射激光信号进行定位和判断盾构机的前进方向。
通过测量和计算反射信号的强度、时间延迟等参数,激光导向系统可以实时判断盾构机相对于设计线路的偏移量,并根据需要调整刀盘的姿态和方向,以使盾构机保持在设计轨迹上。
6.控制系统:激光导向系统的控制系统是整个系统的核心,可以根据激光传感器的反馈信号进行数据处理和控制,实现盾构机的自动导向和定位。
控制系统还可以配合其他设备,如液压系统,实现对盾构机前进速度和力量的控制。
总结:盾构机激光导向系统通过激光器产生激光束,利用光学原理和探测器接收反射激光信号,通过定位算法和控制系统实现盾构机的自动导向和定位。
激光导向系统具有高精度、高效率、自动化等优点,能够大大提高隧道建设的质量和速度。
相信随着技术的不断发展,激光导向系统在盾构机中的应用会越来越广泛,为隧道建设行业带来更多的便利和发展。
盾构机激光导向测量系统原理研究
盾构机激光导向测量系统原理研究
摘要:以我公司在某工程使用的海瑞克S481盾构机为例,介绍该盾构机配套的激光导向测量系统的组成,探讨该激光导向系统的工作过程,从测绘学角度,研究该激光导向系统的工作原理。
关键字:盾构施工盾构机导向测量系统姿态
中图分类号:V556文献标识码: A
引言
目前,盾构法已成为我国隧道施工的一种主要方法,包括地铁隧道,电缆隧道,大的输水隧洞,伴随着激光、计算机及自动控制等技术的发展成熟,激光导向测量系统得到成功运用和发展。
我国盾构施工技术自20世纪50、60年代引进以来,在许多领域有了进步和发展,但在激光导向系统方面,尤其是测绘学原理方面研究不深,在一定程度上影响了盾构施工对隧洞中心轴线控制,而且对我国自行研发也不利。
全面理解激光导向系统的测量原理,有助于工程技术人员在盾构施工中解决问题,保证隧道中心轴线和准确贯通。
1、盾构机激光导向系统组成及其作用
激光导向系统是综合运用测绘技术、激光传感技术、计算机应用技术以及机械电子等技术指导盾构施工的独立运行体系,它主要由:(1)激光全站仪(激光发射和接收源、距离和角度量测设备)和黄盒子(信号传输和供电装置,共2个);(2)激光接收靶(内置光栅和横、竖向测斜仪)和小棱镜;(3)主控室的中继箱、工业电脑(包括安装的软件)、PLC;(4)油缸伸长量测量装置等。
海瑞克盾构机激光导向系统核心是VMT测量系统软件。
在整个盾构施工过程中,激光导线测量系统起着非常重要的作用,它比作盾构机的“眼睛”,如下图2-1盾构施工基本过程图所示,盾构机激光导向系统贯穿整个盾构施工过程:
在测量系统工业电脑上动态显示盾构机轴线相对于隧道设计轴
线的偏差,指导盾构司机根据显示盾构姿态,调整推进参数,使盾构机沿着隧道设计轴线掘进;
获取各环掘进姿态,输入相应数据,自动科学计算管片封顶块拼装位置,指导管片拼装。
输入设计图纸给定的隧洞轴线设计元素,自动计算隧道的理论设计中心轴线;
导向系统自带远程数据传输功能,和地面监控室电脑相连,对盾构机的掘进姿态和相关推进参数实施远程实时监控,并能储存每个时间段的数据,以利于以后的研究。
2、盾构机激光导向系统原理
2.1盾构机激光导向系统涉及的坐标系
盾构机出厂前各参数在一个参考坐标系统中,而我们实际施工中采用的是地面直角测量坐标系,为了解算还引入其他一些空间辅助坐标系,主要坐标系统如下:
地面直角测量坐标系(o-xyz):一般为地方坐标系,地面、地下控制网、测站点、后视点及理论隧道中心线坐标均用该系统表示。
盾构机坐标系(F-xyz):在盾构机出厂设置的,由盾构机制作商给定,以盾构机刀头中心前端切点为远点,以盾构机中心纵轴为X轴,由盾尾指向刀头为正向;以竖向向上方向线为Z轴,Y周沿水平方向与X、Z轴构成左手系。
该系统连同盾构机一起运动的独立直角坐标系,盾体中部、激光靶、前盾、盾构机棱镜等相对盾构机的位置都以此坐标表示。
各坐标系关系如下图2.1-1所示:
图2.1-1各坐标系统关系图
2.2盾构系统运行原理
激光导向测量系统的运行原理是:已知两坐标系之间的平移参数、旋转参数及变形量,求解盾构机自身参考系中的参考点在实际推进过程中的坐标系坐标,通过测得实际坐标与理论坐标比较偏差,拟合修正曲线,指导纠偏,是一个不断测量、计算、纠偏的过程。
盾构机自动导向系统的姿态定位主要是依据地下控制导线点来
精确确定盾构机掘进的方向和位置。
在掘进中盾构机的自动导向系统是主要是根据地下控制导线上一个点的坐标(即X、Y、Z)来确定的,这个点就是带有激光器的全站仪的位置,然后全站仪将依照作为后视方向的另一个地下导线的控制点来定向,这样就确定了北方向,即方位角。
再利用全站仪自动测出的测站与ELS棱镜之间的距离和角度,就可以知道ELS棱镜的三维坐标(即X、Y、Z)。
坡度和旋转直接用安装在ELS内的倾斜仪测量,这个数据大约每秒钟两次传输至工业电脑上。
通过全站仪测出的与ELS之间的距离可以提供沿着DTA掘进的盾构机的里程长度。
所有测得的数据由通信电缆传输至电脑,通过软件组合起来用于计算盾构机轴线上前后两个参考点的精确的空间位置,并与隧道设计轴线比较,得出的偏差值显示在屏幕上,这就是盾构机的姿态。
2.3 盾构机姿态位置的检测和计算
在隧道推进的过程中,必须独立于SLS-T系统定期对盾构机的姿态和位置进行检查。
间隔时间取决于隧道的具体情况,在有严重的光折射效应的隧道中,检查频率要高些。
我们采用棱镜法来对盾构机的姿态进行检查。
在盾构机内有15个参考点(M8螺母),这些点在盾构机构建完成之前就已经定好位了,它们相对于盾构机的轴线有一定的参数关系(见表2.3-1),即它们与盾构机的轴线构成局部坐标系。
在进行测量时,需要将特制的螺栓旋到M8螺母内,再装上棱镜。
利用已知的坐标和测得的坐标经过三维转换,与设计坐标比较,就可以计算出盾构机的姿态和位置参数等。
表2.3-1TBM参考系统各点坐标
点号盾构轴线局部坐标系
X(m) Y(m) Z(m)
1 -2.2115 -3.4045 1.1037
2 -1.7756 -3.6767 1.8745
3 -1.263
4 -3.6773 2.2465
4 0.2770 -3.6742 2.5997
5 1.3467 -3.6657 2.1168
6 2.0391 -3.6679 1.5439
7 2.3519 -3.4547 0.7580
8 2.6713 -3.6672 0.3026
9 1.4187 -3.4484 -1.7412
10 1.1234 -3.6697 -1.9407
11 0.3306 -3.4563 -2.4493
12 -0.5635 -3.4650 -2.2615
13 -0.6785 -3.3458 -1.8555
14 -1.4078 -3.6709 -2.0676
15 -1.7147 -3.4531 -1.7840
用棱镜法来计算盾构机的姿态和位置方法如下:
我们利用洞内地下导线控制点,只要测出15个参考点中的任意
三个点(最好取左、中、右三个点)的实际三维坐标,就可以计算盾构机的姿态。
对于以盾构机轴线为坐标系的局部坐标来说,无论盾构机如何旋转和倾斜,这些参考点与盾构机的盾首中心和盾尾中心的空间距离是不会变的,他们始终保持一定的值,这些值我们可以从它的局
部坐标计算出来。
假设我们已经测出左,中,右(2,8,11号)三个参考点的实际三维坐标,分别为(x1,y1,z1),(x2,y2,z2),(x3,y3,z3),并设未知量为盾
首中心的实际三维坐标(X首,Y首,Z首)和盾尾中心的实际三维坐标(X尾,Y尾,Z尾),在以盾构机轴线构成局部坐标系中,盾首中心为坐标原点,坐标为(0,0,0),盾尾中心坐标为(0,-4.2483,0)。
从表2.3-1中也可以看出各参考点在局部坐标系的坐标值。
根据以上数据就可以列出两组三元二次方程组,来解出盾首中心和盾尾中心的实际三维坐标。
方程组如下:
第一组(计算盾首中心三维坐标):
(x1-x首)2+(y1-y首)2+(z1-z首)2=(-1.7756)2+(-3.6767)2+(1.8745)2
(x2-x首)2+(y2-y首)2+(z2-z首)2=(2.6713)2+(-3.6672)2+(0.3026)2
(x3-x首)2+(y3-y首)2+(z3-z首)2=(0.3306)2+(-3.4563)2+(-2.4493)2
第二组(计算盾尾中心三维坐标):
(x1-x首)2+(y1-y首)2+(z1-z首)2=(-1.7756)2+
(-3.6767+4.2483)2+(1.8745)2
(x2-x首)2+(y2-y首)2+(z2-z首)2=(2.6713)2+
(-3.6672+4.2483)2+(0.3026)2
(x3-x首)2+(y3-y首)2+(z3-z首)2=(0.3306)2+
(-3.4563+4.2483)2+(-2.4493)2
三个方程三个未知量,采用专业软件解算方程组,算出的数值与设计比较,得出的偏差即显示在工业电脑上。
2.4推进纠偏及拟合修正曲线
人工输入修正曲线的参数,根据输入的参数自动计算并形成曲线,调整各个推进油缸区域分压,辅以相应的转弯管片,不断调整实际轴线至理论轴线上。
3、结束语
激光导向系统是从人工导向系统随着科技发展演变而来,基本理论是不变的,变的如何便捷和提高精度。
盾构施工影响因素太多,对测量系统中的测量设备和通讯设备要求较高,一个系统的运行靠的各个环节运行正常,每个过程的提高都能使得导向系统精度提高或者稳定性能调高,此涉及的专业领域广,自动化程度和科技含量高,是个可研究性很高的课题。
参考文献
[1]VMT GmbH-Bruchsal SLS-T Manual[M].Germany
[2]刘基余,李征航等全球定位系统原理及其应用[M] 北京测绘出版社 1995
------------最新【精品】范文。