第1作者2006-06双模压缩真空态模间纠缠度的讨论
- 格式:pdf
- 大小:137.84 KB
- 文档页数:3
自发参量下转换与双模压缩真空态-概述说明以及解释1.引言1.1 概述概述在量子光学领域,自发参量下转换和双模压缩是两个重要的研究课题,它们在光子的生成和控制过程中发挥着关键作用。
本文将结合这两个主题,探讨它们在真空态中的应用和意义。
首先,我们将介绍自发参量下转换的基本原理和特点,以及其在量子信息领域中的应用。
接着,我们将探讨双模压缩的概念和实验方法,以及在量子通信和量子计算中的潜在应用。
最后,我们将研究真空态的特性和量子行为,探讨其在量子信息科学中的重要性。
通过对这三个主题的深入探讨,我们希望能够加深对量子光学中自发参量下转换和双模压缩的理解,并为未来的量子技术发展提供一定的启示和指导。
文章结构部分内容如下:1.2 文章结构本文将分为三个部分来阐述自发参量下转换与双模压缩真空态的相关内容。
首先将在第二部分中介绍自发参量下转换的基本概念和原理,包括其在量子物理中的应用及最新研究进展。
接着,第二部分将详细探讨双模压缩的理论基础和实验现象,以及其与自发参量下转换的联系和区别。
最后,在第二部分中将介绍真空态的概念和性质,以及其在量子信息领域中的重要作用。
通过对这三个主要内容的详细讨论,本文旨在帮助读者更全面地了解自发参量下转换与双模压缩真空态的研究现状和未来发展方向。
1.3 目的目的部分的内容应该清晰地表达本文的研究目标和意义。
在这篇文章中,我们的目的是探讨自发参量下转换与双模压缩真空态之间的关系,从而深入研究这两个物理现象在量子力学中的应用和影响。
通过对这些现象的探讨,我们可以更深入地理解量子系统的行为,并为未来的研究和应用工作提供理论基础和启示。
同时,本文也旨在为读者提供对于这些复杂现象的简明解释,以便让更多人了解并深入研究这一领域的知识。
通过本文的阐述,我们希望能够推动量子物理学领域的发展,促进其在科学研究和技术应用中的进一步应用。
2.正文2.1 自发参量下转换自发参量下转换是一种常见的光学效应,它描述了光子在非线性介质中相互转换的现象。
实现纠缠交换的基本方案王菊霞【摘要】阐述了量子隐形传态及量子纠缠交换的基本理论,通过单光子的量子纠缠交换、连续变量纠缠交换实证说明纠缠交换的机制,纠缠交换可使得从未直接发生相互作用的量子系统产生纠缠,利用纠缠交换可达到实现信息传递的目的,纠缠交换是目前信息学中实现信息交换非常重要的途径之一。
%The description of quantum teleportation and entanglement swapping theory is given.The mechanism of entanglement swapping is illustrated to make use of demonstration in a single-photon and continuous-variable entanglement swapping.It is an im-portant protocol in quantum information science since it enables to entangle two particles that have never interacted in order to realize information transfer.【期刊名称】《渭南师范学院学报》【年(卷),期】2014(000)023【总页数】4页(P17-20)【关键词】量子信息学;量子隐形传态;纠缠交换;信息传递【作者】王菊霞【作者单位】渭南师范学院物理与电气工程学院; 渭南师范学院陕西省X射线检测与应用研究开发中心,陕西渭南714099【正文语种】中文【中图分类】O4311993年,由Zukowki[1]等人提出纠缠交换的概念.两个从未直接相互作用的量子系统之间要产生相互关联可以通过纠缠交换的过程来实现,更重要的是可以建立远程非局域关联.潘建伟等人[2]则最先利用纠缠交换在实验上制备出光子间的纠缠态;在2004年底由彭堃墀院士的研究团队首次实现了连续变量的纠缠交换这一重要的基础实验[3];纠缠交换是量子隐形传态的一个特例,其表现形式是纠缠态的量子隐形传送.要实现纠缠交换,必须得理解量子态、量子纠缠等基本概念,特别值得一提的是,量子纠缠是量子信息最基本的源泉,迄今为止,量子纠缠已被广泛应用于量子隐形传态、量子编码、量子保密通讯和量子计算等领域.1997年,《自然》杂志上发表了一篇具有里程碑意义的研究论文《实验量子隐形传态》,该篇文章引起了全球物理界的轰动,被欧洲物理学会、美国物理学会、美国《科学》杂志等大量宣传及高度评价,此后相应的理论研究非常活跃,直到2004年,相关实验“五光子纠缠和终端开放量子隐形传递”由潘建伟研究团队首次实现[4],这个实验的难度相当大,《自然》杂志称赞此成果是一壮举;随后的研究更上一层楼,取得了一系列重大成果.目前,在光量子纠缠操纵和量子通信方面,我国已经处于领跑的位置.[4]迄今为止,已有多种实现量子纠缠交换的方案[5-12],本文阐述了纠缠交换的基本理论与实现纠缠交换最基本最典型的实证,通过单光子的量子纠缠交换、连续变量纠缠交换的方案,说明了实现纠缠交换的基本机制,旨在了解比较抽象的“纠缠交换”的实质内容及实际应用.1 量子隐形传态对于两个或两个以上子系统构成的量子体系,在任何量子力学表象中,如果无论如何体系都不可能由组成该体系的各子系统对应的量子态矢用直积形式来表示,那么这些子系统之间就存在一定的关联,即表现出相互纠缠的不可分特性,这种情况下它们即使在空间中分离,当对一个子系统的测量时也必然会影响其他子系统的测量结果,这种相互依存的非定域关联称为量子纠缠,简称纠缠.[5-6]量子隐形传态方案首次由Bennett等六位科学家联合在Phys.Rev.Lett.(1993年)上发表论文《由经典和EPR通道传送未知量子态》中提出[13],由此引起了人们对这方面的热烈讨论,直到1997年Bouwmeester、潘建伟等人在实验上首次实现.[14]最早提出的量子隐形传态也叫远距隐形传物,当时的远距传物,类似于不少科幻影片中都出现过的场景:一个神秘人物在某处突然消失掉,然后在另一处莫名其妙地显现出来.在经典物理中的解释为:传送一个物体就是传送组成它的全部经典物理特征,那么只要将原物的所有信息能提取出来,传送这些信息的速度只要不超越光速极限,即使传至遥远的地点,然后利用获得的信息重新构制出与被传送对象完全相同的复制品,这种重新组装的物体就可完成经典客体的隐形传物.[15-16]2 纠缠交换的基本理论设发送者Alice(简称A)和接收者Bob(简称B),他们分别掌握纠缠光束对a,b和c,d,即初始时刻a与b之间存在纠缠,c与d之间存在纠缠,但是,a,b与c,d之间互不纠缠,如果通过第三方Claire(简称C),对b和c进行联合Bell基测量[17],由于测量导致的纠缠塌缩,将使得之前没有任何关联的光学摸a和d之间就会产生纠缠,也就是说通过联合测量,这个操作相当于利用c和d之间的EPR纠缠,将量子态b离物传送至d,在模d上再现模b的量子态特性,从而使模d与模a产生纠缠,即可完成纠缠的转移,这一过程称之为纠缠交换(Entanglement Swapping).通常判断纠缠交换是否实现的实验方法有两种:一种是直接测量关联度.初始模a和模d之间无任何关联,如果测量它们之间的关联达到一定程度,则通过纠缠交换产生了量子关联,也就说明纠缠交换得以实现.[18]另一种是利用量子隐形传态实验,将纠缠交换后的模a和模d作为相干光的纠缠光束,进行相应的实验,通过测量量子态的保真度(Fidelity)来作出判断.如果其保真度F>0.5,则说明a和d之间必然存在纠缠,即完成了纠缠交换.3 单光子的量子纠缠交换一个用于2比特编码单光子控制非门的量子逻辑协议,可实现从动量纠缠转换为偏振纠缠,其实验装置如图1所示,其中使用了参量下转换光子对,它周期性地连接KTP晶体,该晶体属于Ⅱ型共线频率衰减参量下转换产生398.5 nm的连续波.在动量空间中,下转换光束可以分为上半(T)和下半(B)两种模式.图1 单光子纠缠交换方案原理图(PPKTP:周期性连接的KTP晶体;PBS:偏振分束器;HWP:半波片;DP:棱镜;1F:1 nm长的滤光片;D:探测器)根据这些模式动量纠缠态可以写为:其中:H、V分别表示水平和垂直线偏振态.一个交换门可以由三个连续控制非门构成,初始态中的多比特信号光子和闲置光子通过交换门后,由此获得最终偏振纠缠态为:为了实施这个方案需要两种类型的控制非门:偏振控制非门(P-CNOT)和动量控制非门(MCNOT),在图1中,波片的光轴与水平方向成45°角时光子处于偏振态,光路中放置补偿片是为了抵消两个不同模之间的延迟,此方案中需要能传递两光子的一套控制门.动量模式分离后,M-CNOT的功能可通过用于偏振分析的半波片HWP2来实现,分束器BS两个输出端的探测器将同时记录到光子(即符合计数),借助于两臂的探测器这种符合计数,可以将两光子投影到Bell基中的单重态上.通过P-CNOT门的偏振态是.图2 符合计数率(θ2=0°时“方点”、θ2=45°时“圆点”)图3 连续变量纠缠交换方案原理图图2表示符合计数度随着偏振分析角θ2变化的情况,其中θ2为臂2中符合计数器与偏振分析仪的夹角,当θ2=0°时用方形点表示,θ2=45°时用圆形点描述,对于0°和45°情形与正弦曲线的符合度分别为(97±2)%和(88±2)%.在这种量子态的传送中,检验正确的平均几率S必须满足一定的数值范围,该实验测量了S值并得到的结果是S=2.653±0.004,突破了经典极限,根据贝尔不等式大于1.50标准偏差,由此证明:从动量纠缠转换为偏振纠缠,即实现了纠缠交换.4 连续变量的纠缠交换连续变量纠缠交换实现的方案如图3所示,由分束器所获的两束光为压缩真空态,它们的结合产生两对相互正交的纠缠对EPR1和EPR2,EPR1由模式1和2构成,而EPR2由模式3和4构成,两者相互独立.纠缠交换的目的是光束1和4之间形成纠缠,可通过模式2隐形传递到模式4'来实现,而模式4'与模式1并没有直接相互作用.如果成功实现相关量子传态,那么,模式1和4'之间将形成纠缠,在这种方法中,纠缠交换的实质是模式2和4'之间产生纠缠.在连续变量纠缠交换方案中利用了光学参量振荡器(OPO)产生压缩态光束,由860 nm的外腔式倍频蓝宝石激光器分为四个光束为OPO提供泵浦,LO是为探测器提供信号的局域振荡器,AM和PM分别表示振幅调制和相位调制,除了99/1以外的分束器都是50/50,g为经典通道的标准增益.利用不可分离准则验证纠缠交换方案的成功性,模式1和4'之间的不可分离充分条件为:其中:Xj和Pj(j=1,4')分别是湮灭算符实部和虚部对应的正交相位振幅:即aj=xj+ipj,如果不等式(3)成立,那么,没有直接相互作用的模式1和4'对应的两个态将会产生纠缠,在实验中,隐形传态的标准化增益g调整到不等式(3)的最小值.在这种情况下,进行了一系列实验测量,〈[Δ(x1-x4')]2〉的增益g ≈ 0.8,测量〈[Δ(x1)]2〉和〈[Δ(x4')]2〉相对于真空态的噪音电平分别是3.56 ± 0.15 dB、3.60± 0.18 dB;进一步测量〈[Δ(x1-x4')]2〉变化量,其结果表明,噪音电平比真空情况降低0.76±0.19 dB.类似的,测量〈[Δ(p1-p4')]2〉的结果是噪音比真空情况降低0.55±0.19 dB.由此得知:不等式(3)的涨落起伏为0.86±0.04.这些结果低于相应的标准量子极限,显然表明模式1和4之间存在非经典关联,则说明成功实现纠缠交换.5 结语纠缠态具有空间非定域关联(noulocalcore-lation)的特性,对于纠缠态的量子体系,即使二者相距遥远且无相互作用,由于对某一子系统的测量过程会导致纠缠的塌缩,从而可以确定另一子系统状态.验证纠缠交换是否真正实现的基本方法是对没有任何相互作用的两个子系统的量子态执行联合关联测量,当它们的正交关联方差均低于相应的标准量子极限时,则说明两个子系统具有量子纠缠特性,即已完成了纠缠交换.正是因为即使是两个遥远的、从来没有直接相互作用的量子体系,纠缠交换能使它们之间产生纠缠,因此纠缠交换将在长距离的量子通讯、量子通讯网络以及未来的量子计算机等领域都有着潜在的、非常重要的应用前景.参考文献:【相关文献】[1]Zukowski M,Zeilinger A,Horne M A,et al.“Even-Ready-Detectors”Bell experiment via entanglement swapping[J].Phys.Rev.Lett,1993,71(26):4287.[2]Pan J W,Bouwmeester D,Weinfurter H,et al.Experimental entanglementswapping:entangling photons that never interacted[J].Phys.Rev.Lett,1998,80(18):3891.[3]Jia X J,Su X L,Pan Q,et al.Experimental Demonstration of Unconditional Entanglement Swapping for Continuous Variables[J].Phys.Rev.Lett,2004,93(25):250501-250504.[4]俞路石,曾皓,潘建伟.量子世界“追梦人”[N].中国教育报,2014-06-13(1).[5]谢常德,贾晓军,苏晓龙,等.连续变量无条件纠缠交换——纠缠态的量子离物传送[J].物理,2005,34(8):573-577.[6]彭堃墀.压缩态纠缠与连续变量纠缠交换[J].激光与光电子学进展,2005,42(12):7-8. [7]刘红.双光子J-C模型中的纠缠交换方案[J].甘肃联合大学学报(自然科学版),2008,22(2):43-44.[8]杨健,任珉,於亚飞,等.利用交叉克尔非线性效应实现纠缠转移[J].物理学报,2008,57(2):887-891.[9]单传家,夏云杰.外场驱动下腔QED中实现量子纠缠交换的方案[J].滨州学院学报,2006,22(3):23-27.[10]龚晶,何敏,姚泽清.纠缠交换的量子回路实现[J].通信技术,2008,41(6):78-80. [11]栗军.用腔QED技术实现纠缠交换[J].德州学院学报,2007,23(4):32-34.[12]苏晓龙,潘庆,谢常德.连续变量纠缠交换对系统物理参量的依赖关系[J].量子光学学报,2004,10(4):157-163.[13]Bennett C H,Brassard G,Crepeau C,et al.Teleporting an unknown quantum state via dual classical and Einstein Podolsky-Rosen Channels[J].Phys Rev Lett,1993,70(13):1895-1899.[14]Bouwmeester D,Pan J W,Mat tle K,et al.Experimental quantum teleportation [J].Nature,1997,390:575-579.[15]郭光灿,郭涛,郑仕标,等.量子信息讲座第六讲量子隐形传态[J].物理,1999,28(2):120-126.[16]苏晓琴,郭光灿.量子隐形传态[J].物理学进展,2004,24(3):259-273.[17]Zhang Jing,Peng Kun chi.Quantum teleportation and dense coding by means of bright amplitude-squeezed light and direct measurement of a Bell state[J].Phys Rev A,2000,62(6):064302.[18]Zhang Jing,Xie Chang de,Peng Kun chi.Entanglement swapping using nondegenerate optical parametric amplifier[J].Phys.Lett.A,2002,299(5-6):427-432.。
摩擦模型及其磁滞特性的研究1张晓巧,王兴松东南大学机械工程学院,江苏南京 (210096)E-mail: linlangqiao820926@摘 要:摩擦是存在于两接触面间的一种非常复杂的现象,直接影响运动控制系统的定位精度和速度。
根据运动控制发展的需要,本文提出将机械伺服系统中出现的摩擦现象与磁滞现象综合考虑的理念。
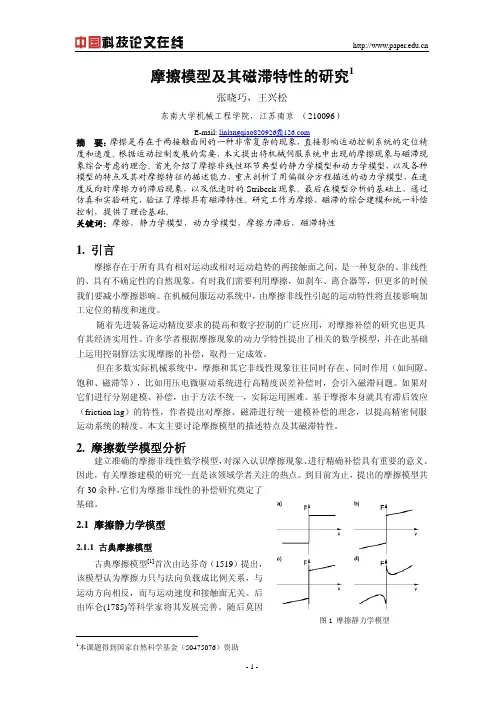
首先介绍了摩擦非线性环节典型的静力学模型和动力学模型,以及各种模型的特点及其对摩擦特征的描述能力,重点剖析了用偏微分方程描述的动力学模型,在速度反向时摩擦力的滞后现象,以及低速时的Stribeck 现象。
最后在模型分析的基础上,通过仿真和实验研究,验证了摩擦具有磁滞特性。
研究工作为摩擦、磁滞的综合建模和统一补偿控制,提供了理论基础。
关键词:摩擦,静力学模型,动力学模型,摩擦力滞后,磁滞特性1. 引言摩擦存在于所有具有相对运动或相对运动趋势的两接触面之间,是一种复杂的、非线性的、具有不确定性的自然现象。
有时我们需要利用摩擦,如刹车、离合器等,但更多的时候我们要减小摩擦影响。
在机械伺服运动系统中,由摩擦非线性引起的运动特性将直接影响加工定位的精度和速度。
随着先进装备运动精度要求的提高和数字控制的广泛应用,对摩擦补偿的研究也更具有其经济实用性。
许多学者根据摩擦现象的动力学特性提出了相关的数学模型,并在此基础上运用控制算法实现摩擦的补偿,取得一定成效。
但在多数实际机械系统中,摩擦和其它非线性现象往往同时存在、同时作用(如间隙、饱和、磁滞等),比如用压电微驱动系统进行高精度误差补偿时,会引入磁滞问题。
如果对它们进行分别建模、补偿,由于方法不统一,实际运用困难。
基于摩擦本身就具有滞后效应(friction lag )的特性,作者提出对摩擦、磁滞进行统一建模补偿的理念,以提高精密伺服运动系统的精度。
本文主要讨论摩擦模型的描述特点及其磁滞特性。
2. 摩擦数学模型分析建立准确的摩擦非线性数学模型,对深入认识摩擦现象、进行精确补偿具有重要的意义。
一维非定常对流扩散方程非均匀网格上的高精度紧致差分格式黄雪芳;郭锐;葛永斌【摘要】A high accuracy compact finite difference scheme with non-uniform grids is pro-posed to solve unsteady convection diffusion equations, which are used to describe boundary layer problems or locally large gradient problems, etc. The new method starts from the dis-cretization of the steady convection diffusion equation. Firstly, the spatial derivatives are discretized by using the Taylor series expansion on non-uniform grids. Then, the second order backward Eulerian difference formula is used to discretize the temporal derivative term. The three-level full implicit compact difference scheme on non-uniform grids for solving the one-dimensional unsteady convection diffusion equation is derived. The new scheme has the second order accuracy in time and the third to fourth order accuracy in space and is unconditionally stable. Finally, some numerical experiments are conducted to demonstrate the high accuracy and the advantages in solving boundary layer problems or locally large gradient problems.%本文在非均匀网格上给出了求解非定常对流扩散方程的一种高精度紧致差分格式,特别适合边界层和大梯度等问题的求解。