(课件)1.1任意角和弧度制
- 格式:ppt
- 大小:1.40 MB
- 文档页数:39
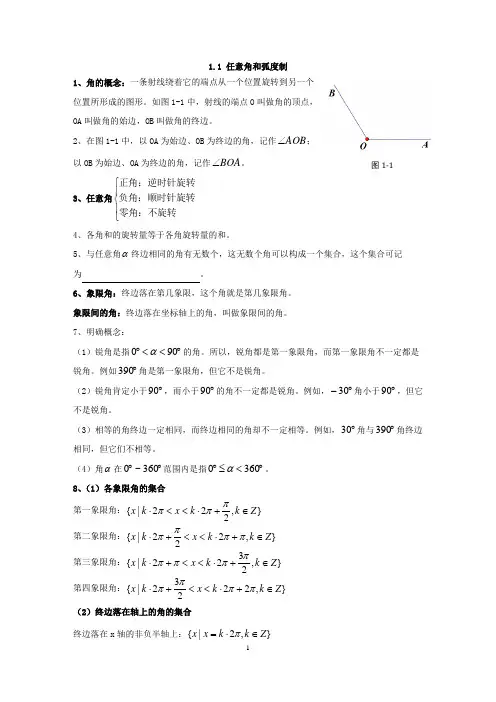
1.1 任意角和弧度制1、角的概念:一条射线绕着它的端点从一个位置旋转到另一个位置所形成的图形。
如图1-1中,射线的端点O 叫做角的顶点,OA 叫做角的始边,OB 叫做角的终边。
2、在图1-1中,以OA 为始边、OB 为终边的角,记作AOB ∠;以OB 为始边、OA 为终边的角,记作BOA ∠。
3、任意角⎪⎩⎪⎨⎧零角:不旋转负角:顺时针旋转正角:逆时针旋转4、各角和的旋转量等于各角旋转量的和。
5、与任意角α终边相同的角有无数个,这无数个角可以构成一个集合,这个集合可记为 。
6、象限角:终边落在第几象限,这个角就是第几象限角。
象限间的角:终边落在坐标轴上的角,叫做象限间的角。
7、明确概念: (1)锐角是指︒<<︒900α的角。
所以,锐角都是第一象限角,而第一象限角不一定都是锐角。
例如︒390角是第一象限角,但它不是锐角。
(2)锐角肯定小于︒90,而小于︒90的角不一定都是锐角。
例如,︒-30角小于︒90,但它不是锐角。
(3)相等的角终边一定相同,而终边相同的角却不一定相等。
例如,︒30角与︒390角终边相同,但它们不相等。
(4)角α在︒︒360~0范围内是指︒<≤︒3600α。
8、(1)各象限角的集合 第一象限角:},222|{Z k k x k x ∈+⋅<<⋅πππ第二象限角:},222|{Z k k x k x ∈+⋅<<+⋅ππππ第三象限角:},2322|{Z k k x k x ∈+⋅<<+⋅ππππ 第四象限角:},22232|{Z k k x k x ∈+⋅<<+⋅ππππ(2)终边落在轴上的角的集合终边落在x 轴的非负半轴上:},2|{Z k k x x ∈⋅=π图1-1终边落在x 轴的非正半轴上:},2|{Z k k x x ∈+⋅=ππ终边落在x 轴上:},|{Z k k x x ∈⋅=π 终边落在y 轴的非负半轴上:},22|{Z k k x x ∈+⋅=ππ 终边落在y 轴的非正半轴上:},22|{Z k k x x ∈-⋅=ππ终边落在y 轴上:},2|{Z k k x x ∈+⋅=ππ终边落在坐标轴上:},2|{Z k k x x ∈⋅=π9、角度制与弧度制(1)1弧度角的规定:长度等于半径长的圆弧所对的圆心角叫做1弧度的角。