基于MATLAB的单闭环直流调速系统的设计与仿真
- 格式:doc
- 大小:51.50 KB
- 文档页数:3

单闭环直流调速系统的设计与仿真实验报告摘要:本文基于基本原理和方法,设计和仿真了一个单闭环直流调速系统。
首先介绍了直流电机调速的基本原理,然后根据系统要求,设计了控制系统的结构和参数,包括PID控制器的参数调整方法。
接下来使用Matlab/Simulink软件进行系统仿真实验,对系统的性能进行评估。
最后根据仿真结果对系统进行分析和总结,并提出了可能的改进方法。
关键词:直流电机调速、单闭环控制系统、PID控制器、仿真实验一、引言直流电机广泛应用于机械传动系统中,通过调节电机的电压和电流实现电机的调速。
在实际应用中,需要确保电机能够稳定运行,并满足给定的转速要求。
因此,设计一个高性能的直流调速系统至关重要。
本文基于单闭环控制系统的原理和方法,设计和仿真了一个直流调速系统。
首先介绍了直流电机调速的基本原理,然后根据系统要求,设计了控制系统的结构和参数,并采用PID控制器进行调节。
接着使用Matlab/Simulink软件进行系统仿真实验,并对系统的性能进行评估。
最后根据仿真结果对系统进行分析和总结,并提出了可能的改进方法。
二、直流电机调速的基本原理直流电机调速是通过调节电机的电压和电流实现的。
电压变化可以改变电机的转速,而电流变化可以改变电机的转矩。
因此,通过改变电机的电压和电流可以实现电机的调速。
三、控制系统设计和参数调整根据系统的要求,设计一个单闭环控制系统,包括传感器、控制器和执行器。
传感器用于测量电机的转速,并将信息传递给控制器。
控制器根据测量的转速和给定的转速进行比较,并调节电机的电压和电流。
执行器根据控制器的输出信号来控制电机的电压和电流。
在本实验中,采用PID控制器进行调节。
PID控制器的输出信号由比例项、积分项和微分项组成,可以根据需要对各项参数进行调整。
调整PID控制器的参数可以使用试错法、频率响应法等方法。
四、系统仿真实验使用Matlab/Simulink软件进行系统仿真实验,建立直流调速系统的模型,并对系统进行性能评估。
课题:一、单闭环直流调速系统的设计与Matlab 仿真(一)作者: 学号: 专业: 班级: 指导教师:在对调速性能有较高要求的领域,如果直流电动机开环系统稳态性能不满足要求,可利用速度负反馈提高稳态精度,而采用比例调节器的负反馈调速系统仍是有静差的,为了消除系统的静差,可利用积分调节器代替比例调节器。
通过对单闭环调速系统的组成部分可控电源、由运算放大器组成的调节器、晶闸管触发整流装置、电机模型和测速电机等模块的理论分析,比较原始系统和校正后系统的差别,得出直流电机调速系统的最优模型,然后用此理论去设计一个实际的调速系统。
本设计首先进行总体系统设计,然后确定各个参数,当明确了系统传函之后,再进行稳定性分析,在稳定的基础上,进行整定以达到设计要求。
另外,设计过程中还要以Matlab为工具,以求简明直观而方便快捷的设计过程。
摘要:Matlab 开环闭环负反馈静差稳定性V-M 系统摘要 (2)一、 ..................................................... 设计任务 41、 ...................................................... 已知条件42、设计要求 (4)二、 ..................................................... 方案设计 51、 ...................................................... 系统原理 52、 ........................................................ 控制结构图 6三、 ..................................................... 参数计算7四、 ....................................................... PI调节器的设计.. (9)五、 ................................................ 系统稳定性分析11六、 ......................................................... 小结12七、 ..................................................... 参考文献13一、设计任务1、已知条件已知一晶闸管-直流电机单闭环调速系统(V-M系统)的结果如图所示。
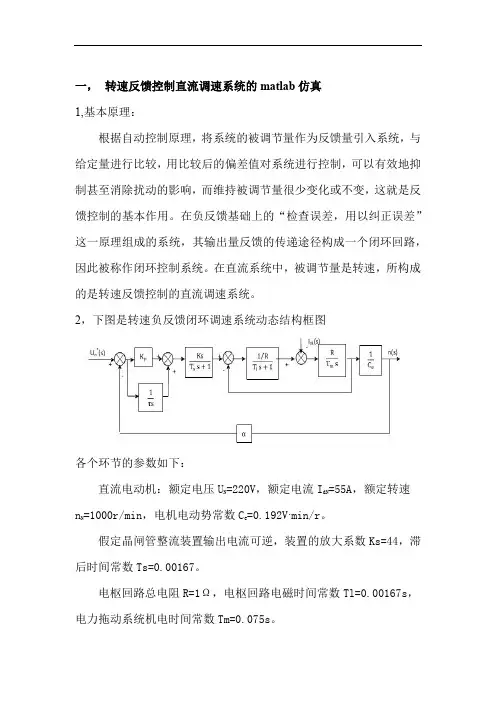
一,转速反馈控制直流调速系统的matlab仿真1,基本原理:根据自动控制原理,将系统的被调节量作为反馈量引入系统,与给定量进行比较,用比较后的偏差值对系统进行控制,可以有效地抑制甚至消除扰动的影响,而维持被调节量很少变化或不变,这就是反馈控制的基本作用。
在负反馈基础上的“检查误差,用以纠正误差”这一原理组成的系统,其输出量反馈的传递途径构成一个闭环回路,因此被称作闭环控制系统。
在直流系统中,被调节量是转速,所构成的是转速反馈控制的直流调速系统。
2,下图是转速负反馈闭环调速系统动态结构框图各个环节的参数如下:直流电动机:额定电压U N=220V,额定电流I dN=55A,额定转速n N=1000r/min,电机电动势常数C e=0.192V·min/r。
假定晶闸管整流装置输出电流可逆,装置的放大系数Ks=44,滞后时间常数Ts=0.00167。
电枢回路总电阻R=1Ω,电枢回路电磁时间常数Tl=0.00167s,电力拖动系统机电时间常数Tm=0.075s。
转速反馈系数α=0.01 V·min/r。
对应的额定电压U n*=10V。
在matlab的simulink里面的仿真框图如下其中PI调节器的值暂定为Kp=0.56,1/τ=11.43。
3,仿真模型的建立:进入matlab,单击命令窗口工具栏的simulink图标,打开simulink模块浏览器窗口,如下图所示:打开模型编辑器窗口,双击所需子模块库的图标,则可以打开它,用鼠标左键选中所需的子模块,拖入模型编辑窗口。
要改变模块的参数双击模块图案即可(各模块的参数图案)。
加法器模块对话框Gain模块对话框把各个模块连接起来并按照上面给定的电机参数修改各个模块相应的参数,可以得到如下的比例积分的无静差直流调速系统的仿真框图:4,仿真后的结果及其分析:其中输出scope1中可以看出超调和上升时间等。
改变PI调节器的参数,并在仿真的曲线中得到最大的超调级调整时间,相互间进行比较,如下表所示:参照以上表格中的数据分析可知,改变PI调节器的参数,可以得到快速响应的超调量不一样,调节时间不一样的响应曲线。
实验二单闭环直流调速系统MATLAB 仿真
一、实验目的
1.掌握单闭环直流调速系统的原理及组成;
2.掌握单闭环直流调速系统的仿真。
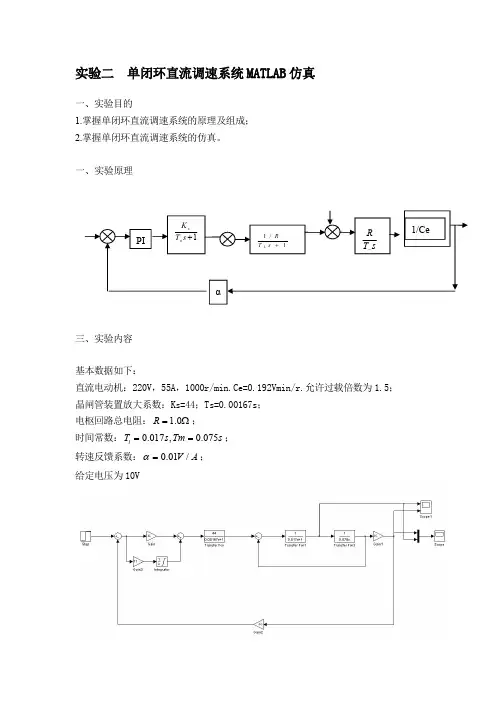
一、实验原理
三、实验内容
基本数据如下:
直流电动机:220V,55A,1000r/min.Ce=0.192Vmin/r.允许过载倍数为1.5;晶闸管装置放大系数:Ks=44;Ts=0.00167s;
电枢回路总电阻:Ω=0.1R ;
时间常数:s Tm s T l 075.0,017.0==;
转速反馈系数:A V /01.0=α;
给定电压为10V
四、实验步骤
1.根据原理和内容搭建电路模型;
2.设置各元器件的参数;
Step:step time=’0’final valve=’10’
Intergrator的限幅值为正负10
Kpi=0.25,1/τ=3;Kpi=0.56,1/τ=11.43;Kpi=0.8,1/τ=15;
3.设置仿真参数:仿真时间设为0.06s;计算方法为ode15或ode23。
4.仿真实现。
五、实验报告
1.绘制负载电流为零时电流及转速输出波形;
2.绘制负载电流为额定电流时电流及转速输出波形;
3.并讨论P及PI调节器参数对系统的影响。
step Simulink/sources‘0’‘0’‘10’‘0’Integrator Simulink/continuous/‘0’‘10’‘-10’Transfer Fcn Simulink/continuous/
gain Simulink/math operations
sum Simulink/math operations+-。
单闭环直流调速系统的仿真研究【基于MATLAB软件的仿真】《论文》1引言调速方法通常有机械的、电气的、液压的、气动的几种,仅就机械与电气调速方法而言,也可采用电气与机械配合的方法来实现速度的调节。
电气调速有许多优点,如可简化机械变速机构,提高传动效率,操作简单,易于获得无极调速,便于实现远距离控制和自动控制,因此,在生产机械中广泛采用电气方法调速。
1.1直流调速系统的概述由于直流电动机具有极好的运动性能和控制特性,尽管它不如交流电动机那样结构简单、价格便宜、制造方便、维护容易,但是长期以来,直流调速系统一直占据垄断地位。
就目前来看,直流调速系统仍然是自动调速系统的主要形式。
在我国许多工业部门,如海洋钻探、纺织、轧钢、矿山、采掘、金属加工、造纸以及高层建筑等需要高性能可控电力拖动的场合,仍然广泛采用直流调速系统。
而且,直流调速系统在理论上和实践上都比较成熟,从控制技术的角度来看,它又是交流调速系统的基础。
随着GTO晶闸管、GTR、P-MOSFET、IGBT和MCT等全控型功率器件的问世,这些有自断能力的器件逐步取代了原来普通晶闸管系统所必须的换向电路,简化了电路的结构,提高了效率和工作频率,降低了噪声,缩小了电力电子装置的体积和重量。
谐波成分大、功率因素差的相控变流器逐步被斩波器或脉冲宽度调制器所代替,明显的扩大了电动机控制的调速范围,提高了调速精度,改善了快速性、效率和功率因素。
PWM电源终将取代晶闸管相控式可控功率电源,成为电源的主流。
随着信息、控制与系统学科以及电力电子的发展,电力拖动系统获得了迅猛发展,从旋转交流机组到水银整流器静止交流装置、晶闸管整流装置,再到众多集成电力模块。
目前完全数字化的控制装置已成功应用于生产,以微机作为控制系统的核心部件,并具有控制、检测、监视、故障诊断及故障处理等多功能电气传动系统正处在形成和不断完善之中。
1.2本章小结本章介绍了直流调速系统的研究前景及其优点。
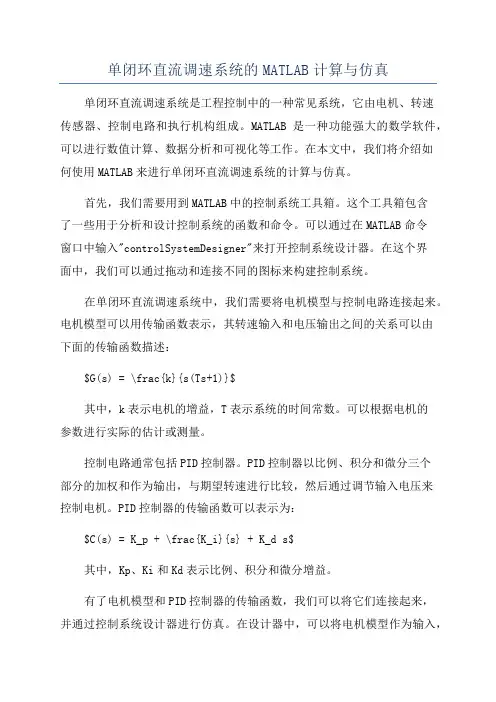
单闭环直流调速系统的MATLAB计算与仿真单闭环直流调速系统是工程控制中的一种常见系统,它由电机、转速传感器、控制电路和执行机构组成。
MATLAB是一种功能强大的数学软件,可以进行数值计算、数据分析和可视化等工作。
在本文中,我们将介绍如何使用MATLAB来进行单闭环直流调速系统的计算与仿真。
首先,我们需要用到MATLAB中的控制系统工具箱。
这个工具箱包含了一些用于分析和设计控制系统的函数和命令。
可以通过在MATLAB命令窗口中输入"controlSystemDesigner"来打开控制系统设计器。
在这个界面中,我们可以通过拖动和连接不同的图标来构建控制系统。
在单闭环直流调速系统中,我们需要将电机模型与控制电路连接起来。
电机模型可以用传输函数表示,其转速输入和电压输出之间的关系可以由下面的传输函数描述:$G(s) = \frac{k}{s(Ts+1)}$其中,k表示电机的增益,T表示系统的时间常数。
可以根据电机的参数进行实际的估计或测量。
控制电路通常包括PID控制器。
PID控制器以比例、积分和微分三个部分的加权和作为输出,与期望转速进行比较,然后通过调节输入电压来控制电机。
PID控制器的传输函数可以表示为:$C(s) = K_p + \frac{K_i}{s} + K_d s$其中,Kp、Ki和Kd表示比例、积分和微分增益。
有了电机模型和PID控制器的传输函数,我们可以将它们连接起来,并通过控制系统设计器进行仿真。
在设计器中,可以将电机模型作为输入,PID控制器作为输出。
然后,我们可以通过调整PID控制器的增益来改变系统的动态响应。
还可以通过添加阻尼器或滤波器来进一步优化系统的性能。
完成连接后,可以点击设计器界面中的“模拟”按钮来进行系统的仿真。
仿真结果将显示在设计器的右侧窗口中,包括系统的阶跃响应、频率响应和鲁棒性等指标。
通过观察这些指标,可以评估系统的性能并进行参数优化。
除了使用控制系统设计工具箱之外,MATLAB还提供了许多其他功能来进行系统的计算和仿真。
《MATLAB工程应用》转速单闭环直流调速系统仿真一、选题背景晶闸管开环直流调速系统启动电流大,转速随负载变化而变化,负载越大,转速降落越大,因此,无法在负载变动时保持转速的稳定,影响生产。
为了提高直流调速系统的动静态性能指标,通常采用闭环控制系统(单闭环或双闭环)。
对调速指标要求不高的场合,采用单闭环系统;对调速指标要求高的场合,采用双闭环系统。
按反馈的方式不同,可分为转速反馈、电流反馈、电压反馈。
在单闭环系统中,般采用转速反馈。
二、原理分析转速单闭环直流调速系统原理如图 1 转速单闭环直流调速系统原理图所示。
图 1 转速单闭环直流调速系统原理图中将反映转速变化的电压信号作为反馈信号,经过速度变换后接到电流调节器的输入端,与给定的电压U;相比较经放大后,得到移相控制电压信号Uc,用作控制整流桥的触发电路,触发脉冲经功放后加到晶闸管的门极和阴极之间,以改变整流桥的输出电压,这就构成了速度负反馈闭环系统。
图 1 转速单闭环直流调速系统原理图该系统在电机负载增加时,转速n将下降,转速反馈U n减小,导致转速的偏差ΔU n。
将增大(ΔU n=U n∗−U n),U C增加,并经移相触发器使整流器输出电压U增加,电枢电流1。
也就增加了,从而使电动机电磁转矩增加,转速n也随之升高,补偿了负载增加造成的转速降。
在MATLAB仿真中,通常省略AD采样中的变换环节,直接用测量模块得到实际物理量。
三、过程论述利用Simulink建立有静差的转速单闭环直流调速系统仿真模型。
该系统由给定信号、速度调节器、晶闸管整流桥、平波电抗器、直流电动机、速度反馈等部分组成。
与开环直流调速系统相比,二者的主电路就基本相同,系统的差别主要在控制电路上。
图 2 有静差的转速单闭环直流调速系统仿真模型图 2 有静差的转速单闭环直流调速系统仿真模型中的二极管桥模块参数设置如图 3 二极管参数设置。
在整流桥后面并一个二极管桥,主要是为了加快电动机的减速过程,同时避免在整流桥输出端出现负电压而使波形畸变。
《MATLAB工程应用》
转速单闭环直流调速系统仿真
一、选题背景
此次课程设计要求设计转速单闭环直流电路,与转速双闭环直流电路相比,转速单闭环直流电路的电源利用率更高,应用更为广泛。
我们应该对转速单闭环直流理论知识详细掌握,以及对MATLAB的simulink进行熟练的操作。
二、原理分析
任何一个自动控制系统的调试都是先从弄清这个自动控制系统由哪些器件或设备组成,其大致的工作原理及整个系统的工作过程如何开始的。
对自动控制系统基本组成及工作原理的分析称为定性分析。
下面就结合本章介绍的相关知识,对一个实际的自动控制系统——单闭环直流调速系统进行工作原理上的定性分析。
三、过程论述
原理图
仿真图
四、结果分析
五、课程设计总结
当负载突增时,积分控制的无静差调速系统动态过程曲线如图。
在稳态运行时,转速偏差电压必为零。
如果不为零,则继续变化,就
不是稳态了。
在突加负载引起动态速降时产生,达到新的稳态时,又恢复为零,但已从上升到,使电枢电压由上升到,以克服负载电流增加的压降。
比例积分控制综合了比例控制和积分控制两种规律的优点,又克服了各自的缺点,扬长避短,互相补充。
比例部分能迅速响应控制作用,积分部分则最终消除稳态偏差。
0 引言在现代化的工业生产中,对作为生产设备主要动力的电动机有较高的要求。
根据不同的生产要求,常常需要对生产设备进行平滑调速,而调速要通过调节电动机来实现。
同时,大多数设备要求动力系统运行稳定、具有良好的动态性能,这往往也直接取决于电动机的性能。
直流电动机因为具有较多明显的优点,常常被用于工业生产中。
直流电动机闭环调速系统具有较多优点,如可以在较大范围内进行无级调速且结构简单,启动、制动性能良好等,在具有较高要求的工业生产领域得到了广泛应用。
因此本文在Matlab 平台上搭建了直流电动机闭环调速系统的仿真模型[1],并进行了仿真分析。
1 直流闭环调速系统原理带转速负反馈的有静差直流闭环调速系统的电气原理图如图1所示。
系统由转速给定环节*nU 、放大器P K 、移相触发器CF、晶闸管整流器、直流电动机M、测速发电机G 等组成。
其中,n U :转速反馈;n U ∆:转速偏差,*n n n U U U ∆=−;C U :放大器输出;d U :整流器输出电压;d I :电枢电流。
在该系统中,当电动机负载增加时,转速反馈n U 将随着转速的下降而减小,而转速的偏差n U ∆将增大,同时放大器输出C U 增加,并经移相触发器使整流输出电压d U 增加,电枢电流d I 增加,从而使电动机电磁转矩增加,转速也随之提高,补偿了由于负载增加所引起的转速降落[2]。
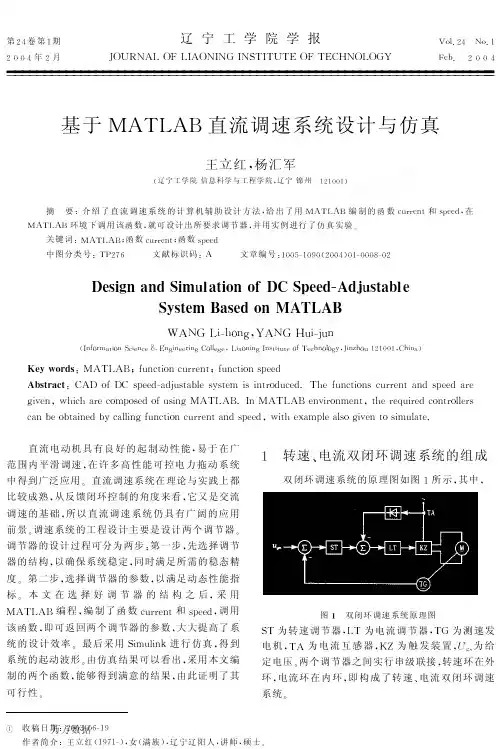
带转速反馈的直流调速系统的稳态特性方程为:frequent stepless rapid start, braking and reversal, with excellent motion performance and control characteristics. And dc speed regulation is mature in theory and practice, and it is the basis of AC speed regulation. Therefore, the study of DC speed regulation system for the development of AC speed regulation, improve the speed regulation system has an important role.Keywords: automatic speed regulation;dc motor;Matlab simulation;control feature基金项目:本文系河南省智能制造技术与装备工程技术研究中心、焦作市物料传输设备关键件制造工艺与装备工程技术研究中心项目(3118210370)的研究成果。
摘要运动控制系统中应用最广泛的是自动调速系统,在工程实践中,有许多生产机械要求在一定的范围内进行速度的平滑调节,并且要求有良好的稳态、动态性能。
晶闸管直流调速系统由整流变压器、晶闸管整流调速装置、平波电抗器、电动机-发电机、测速反馈系统组成。
晶闸管调速系统以其良好的调速性能而广泛应用于生产生活中。
闭环控制对电动机的稳定性有很好的保障。
对于晶闸管直流电动机系统的研究要从两个方面进行,一是在带电动机负载时整流电路的工作情况;二是由整流电路供电时电动机的工作情况。
本文介绍了晶闸管直流电机调速系统,运用M a t l a b 进行了仿真,并对晶闸管直流调速系统参数和环节特性进行了分析和测定。
关键词:晶闸管,整流,直流调速,M a t l a b,闭环控制目录第一章概述 (3)第二章调速控制系统的性能指标 (4)2.1 直流电动机工作原理 (4)2.2 电动机调速指标 (4)2.3 直流电动机的调速 (5)2.4直流电机的机械特性 (6)第三章单闭环直流电动机系统 (7)3.1 三相桥式全控整流电路 (7)3.1.1带电阻负载时的工作情况 (7)3.1.2 三相桥式全控整流电路计算公式 (9)3.2 单闭环直流调速 (9)第四章电路设计和仿真 (10)4.1 电路原理 (10)4.2 参数设定及Matlab的仿真 (11)4.2.1 系统仿真图 (11)4.2.2 系统的建模和参数的设定 (11)4.3 仿真结果 (13)第五章总结 (15)参考文献 (16)第一章概述电动机是用来拖动某种生产机械的动力设备,所以需要根据工艺要求调节其转速。
比如:在加工毛坯工件时,为了防止工件表面对生产刀具的磨损,因此加工时要求电机低速运行;而在对工件进行精加工时,为了缩短加工时间,提高产品的成本效益,因此加工时要求电机高速运行。
所以,我们就将调节电动机转速,以适应生产要求的过程就称之为调速;而用于完成这一功能的自动控制系统就被称为是调速系统。
1 绪论直流电动机具有良好的起、制动性能,宜于在广泛范围内平滑调速,在轧钢机、矿井卷扬机、挖掘机、海洋钻机、金属切割机床、造纸机、高层电梯等需要高性能可控电力拖动的领域中得到了广泛的应用。
近年来直流调速系统发展很快,然而直流拖动控制系统毕竟在理论上和实践上都比较成熟,而且从反馈闭环控制的角度来看,它又是交流拖动控制系统的基础,所以首先应该很好的掌握直流系统。
我们可以首先从单闭环转速负反馈直流调速系统来研究。
由于系统需要观察较多的性能,计算参数较多,而MATLAB 中的Simulink实用工具可直接构建其动态模型,省去大量的计算,通过修改动态模型可完善系统性能。
直流调速系统概述从生产机械要求控制的物理量来看,电力传动自动控制系统有调速系统、位置伺服系统、张力控制系统等其他多种类型,各种系统往往是通过控制转速来实现的,因此调速系统是最基本的驱动控制系统。
调速系统目前分为交流和直流调速控制系统,由于直流调速系统的调速范围广,静差率小、稳定性好并且具有良好的动态性能。
因此在相当长的时期内,高性能的调速系统几乎都采用了直流调速系统。
相比于交流调速系统,直流调速系统在理论上和实践上更加成熟。
直流调速是现代电力拖动自动控制系统中发展较早的自动控制系统。
在20世纪60年代发展起来的电力电子技术,使电能可以转换和控制,产生了现代各种高效、节能的新型电源和交直流调速装置,为工业生产,交通运输,建筑、办公、家庭自动化控制设备提供了现代化的高新技术,提高了生产效率和人们的生活质量,因此,人类社会的生产、生活发生了巨大变化。
随着新型电力电子器件的研究和开发,先进控制技术的发展,电力电子和电力传动控制装置的性能也不断优化和提高,这一变化的影响将越来越大。
单闭环直流电机调速系统在现代日常生活中的应用越来越广泛,其良好的调速性能、低廉的价格越来越被大众接受。
单闭环直流调速系统由整流变压器、平波电抗器、晶闸管整流调速装置、电动机-发电机、闭环控制系统组成。
基于Matlab的单闭环直流调速系统仿真实验设计尚丽;陈杰【期刊名称】《苏州市职业大学学报》【年(卷),期】2011(022)004【摘要】分析Matlab/Simulink仿真技术在转速单闭环直流调速系统中的应用.考虑了转速有静差和无静差两种情况,采用面向电气原理结构图的仿真方法建立仿真模型;给出主电路和控制电路的参数设置方法,同时改变转速调节器的参数设置,对单闭环直流调速系统的调速性能进行仿真实验分析,并给出直流电动机的转速和电枢电流仿真波形.实验结果表明,单闭环直流调速系统的调速性能仿真结果与理论推导的调速性能一致,对实验教学有一定的指导意义.%This paper mainly analyzes the application of simulation technique of Matlab/Simulink to rotating speed single closed loop DC speed control system.utilizing the simulation method of facing electric principle construction diagram based on the possible cases of static error and no static error,the paper proposes the parameter setting methods of main circuit and control circuit.At the same time,the simulation experimental analysis of the speed performance of the single-losed loop DC motor control system is made with changes of the parameter setting of speed regulator.The simulation waves of speed and current of DC motor are also given out.The experimental results show that the simulation results of speed performance of single closed loop DC motor are consistent with those obtained from theory,and this system offers guidance for experimental teaching.【总页数】5页(P1-5)【作者】尚丽;陈杰【作者单位】苏州市职业大学电子信息工程系,江苏苏州215104;苏州市职业大学电子信息工程系,江苏苏州215104【正文语种】中文【中图分类】TP391【相关文献】1.基于MATLAB直流双闭环调速系统仿真研究 [J], 龙明艳;鲁绍万;黄东2.基于Matlab无刷直流电机双闭环调速系统仿真研究 [J], 张克涵;狄正飞;刘晓强;武黎明3.基于电流截止负反馈的单闭环直流调速控制系统仿真 [J], 魏宁4.基于Matlab的双闭环直流调速系统仿真及参数进化设计 [J], 周凯汀;郑力新5.基于MATLAB/SIMULINK的双闭环直流调速系统仿真 [J], 沈凤龙因版权原因,仅展示原文概要,查看原文内容请购买。
MATLAB仿真技术报告1题目:转速反馈单闭环直流调速系统仿真直流电机模型框图如下图所示,仿真参数为R=0.2,T l=0.012,T m=0.09,Ce=0.1。
本次仿真采用算法为ode45,仿真时间2s。
1、开环仿真:用Simulink实现上述直流电机模型,直流电压U d0取420V,0~1s,电机空载,即I d=0;1s~2s,电机满载,即I d=150A。
(1) 画出转速n的波形,根据仿真结果求出空载和负载时的转速n以及静差率s。
(2) 画出电枢绕组电流波形。
画出电枢绕组电流波形。
1.负载时的转速波形如上图,在Id的作用下。
在一秒后,波形会有个明显的下降,这是因为在负的扰动下,经过负反馈,导致转速下降,输出的转速波形如图由图中标尺功能可得出,空载时转速n=4200rpm负载时转速n s=3900rpm。
由静差率公式s= n−n sn 可知可知s=4200−39004200=0.0714.2.上图是电枢绕组电流波形,因为是有了电流Id 扰动,在一秒后有了一个电流分量,如果在电流Id 为零的时候,电枢绕组电流的波形应该在电机平稳运转之后降为0,或者有一个极为细微的电流。
从图中可以看出,电流在1s 后不为零,这就是受到扰动阶跃信号影响的结果。
2、闭环仿真:在上述仿真基础上,添加转速闭环控制器,转速指令为4200rpm ,0~1s ,电机空载,即I d =0;1s~2s ,电机满载,即I d =150A 。
(1) 控制器为比例环节:比较不同k p 值时的稳态转速。
值时的稳态转速。
(2)控制器为比例积分环节,设计恰当的k p 和k I 值,画出转速波形、电机端电压波形和电枢绕组电流波形,求出静差率、超调量。
求出静差率、超调量。
(3) 分析(2)中电压和电流波形,解释为什么闭环系统动态响应优于开环系统。
1. Kp取不同的值时,有着不同的稳态转速,上左图Kp=1,稳态转速为3791rpm上右图Kp=2,稳态转速为3988rpm。
《MATLAB工程应用》转速单闭环直流调速系统仿真一、选题背景在对调速性能有较高要求的领域,如果直流电动机开环系统稳态性能不满足要求,可利用速度负反馈提高稳态精度,而采用比例调节器的负反馈调速系统仍是有静差的,为了消除系统的静差,可利用积分调节器代替比例调节器。
通过对单闭环调速系统的组成部分可控电源、由运算放大器组成的调节器、晶闸管触发整流装置、电机模型和测速电机等模块的理论分析,比较原始系统和校正后系统的差别,得出直流电机调速系统的最优模型。
然后用此理论去设计一个实际的调速系统,并用MATLAB仿真进行正确性的验证。
二、原理分析(设计理念)晶闸管-直流电动机系统可以通过调节晶闸管控制角改变电动机电枢电压实现调速,但是存在两个问题,一是全电压启动时启动电流大;二是转速随着负载变化而变化,负载越大,转速降落越大,难于在负载变动时保持转速的稳定而满足生产工艺的要求。
为了减小负载波动对电动机转速的影响,可以采取带转速负反馈的闭环调速系统,根据转速的偏差来自动调节整流器的输出电压,从而保持转速的稳定。
带转速负反馈的有静差直流调速系统的结构如图1所示。
系统有转速给定环节U。
放大器 Kp、移相触发器CF、晶闸管整流器和直流电动机M、测速发电机TG等组成。
该系统在电动机负载增加时,转速将下降,转速反馈U。
减小,而转速的偏差△U。
将增大(△U.=U.-U.)同时放大器输出U。
增加,并经移相触发器使整流器输出电压U。
增加,电枢电流[。
增加,从而使电动机电磁转矩增加,转速也随之升高,补偿了负载增加造成的转速降。
三、过程论述该系统在电机负载增加时,转速n将下降,转速反馈Un减小,导致转速的偏差△Un增大(△Un=Un*-Un),同时放大器输出Uc增加,并经移相触发器使整流输出电压Ud增加,电枢电流Id增加,从而使电动机电磁转矩增加,转速n 也随之升高,补偿了负载增加造成的转速降。
上述负载R增加时转速调节的过程可以简单表示如下:R增大→n减小→Un减小→△Un增大→Uc增大→Ud增大→Id增大四、结果分析1.AC电源2.Universal Bridge3. RL4.DC Machine5.Step6.Pulse7.Saturation8.输出波形图对研究过程中所获得的主要的数据、现象进行定性或定量分析,得出结论和推论。