2019年全国大学生电子设计竞赛赛题B题_巡线机器人
- 格式:pdf
- 大小:451.97 KB
- 文档页数:5
2023年全国职业院校技能大赛高职组“机器人系统集成应用技术”赛项学生赛赛题B评分表配分表及得分表统分裁判(签字)核分裁判(签字)裁判长(签字) ___________________裁判(签名): 选手确认(签赛位号):模块子项评分标准分值得分60-Σ⅛:.小计8完成视觉的安装,得0∙5分,能采集清晰稳定的图像,得0∙5分。
1平1完成视觉的标定,得1分。
(根据4.3任务判,能正确检测出划痕尺寸,此部分正确)评分前准备:1、4号仓位轮毂:视觉检测区域3贴“划痕1”贴纸,视觉检测区域4贴红色标签贴纸2、5号仓位轮毂:正面贴瑕疵贴纸如下图所示位置,并贴“划痕4”任务4视觉单元集成应用8分能正确检测出划痕尺寸,在WINCC显示出来,显示范围误差1.5不超过29mm±0.5mm,得1.5分能正确检测出颜色标签,在WINCC显示出来,显示红色,得1.5L5分能正确检测瑕疵数量,在WlNCC显示数量3,得1分1工业机器人实现使用端面打磨工具,在打磨工位打磨区域2,得2分2小计8一评分前准备:轮毂背面朝上放置到3号仓位中,视觉检测区域3贴划痕3贴纸;视觉检测区域4贴蓝色标签纸在攵,机器人运动状态打到自动运行模式,评分过程任意流程中断或错误,评J梵A分结束,中断后的内容不给分为营商或按下控制面板的绿色“自复位”按钮,流程启动,设备集成三色灯绿灯以IHZ频率闪烁,得1分11.5调或步骤1:3号料仓推出,机器人拾取快换工具,完成24分轮毂抓取,得1.5分模块子项裁判(签名):选手确认(签赛位号):裁判(签选手确认(签赛位号):名):。
2023年全国赛区大学生电子设计TI杯竞赛试题(E题)参赛注意事项(1)20xx年x月xx日8:00竞赛正式开始。
本科组参赛队只能在A、B、C、D、E题目中任选一题;高职高专组参赛队原则上在F、G、H题中任选一题,也可以选择其他题目。
(2)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生身份的有效证件(如学生证)随时备查。
(3)每队严格限制3人,开赛后不得中途更换队员。
(4)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设计制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违纪参赛队取消评审资格。
(5)20xx年x月xx日20:00竞赛结束,上交设计报告、制作实物及《登记表》,由专人封存。
激光枪自动射击装置(E题)【本科组】一、任务设计一个能够控制激光枪击发、自动报靶及自动瞄准等功能的电子系统。
该系统由激光枪及瞄准机构、胸环靶、弹着点检测电路组成,其结构示意见图1。
二、要求1.基本要求(1) 用激光笔改装激光枪,激光枪可受电路控制发射激光束,激光束照射于胸环靶上弹着点的光斑直径<5mm;激光枪与胸环靶间距离为3m。
图1 激光枪自动射击装置示意图(2) 激光枪固定在一机构上,可通过键盘控制激光枪的弹着点(用键盘设置激光束在靶纸上上下、左右移动一定距离)。
(3) 制作弹着点检测电路,通过摄像头识别激光枪投射在胸环靶上的弹着点光斑,并显示弹着点的环数与方位信息。
其中环数包括:10、9、8、7、6、5、脱靶;方位信息是指弹着点与10环区域的相对位置,包括:中心、正上、正下、正左、正右、左上、左下、右上、右下。
详见图2-b。
2.发挥部分(1) 在图形点阵显示器上显示胸环靶的相应图形,并闪烁显示弹着点。
(2) 自动控制激光枪,在15秒内将激光束光斑从胸环靶上的指定位置迅速瞄准并击中靶心(即10环区域)。
(3) 可根据任意设定的环数,控制激光枪瞄准击中胸环靶上相应位置。
全国大学生电赛历年题目文章来源:互联网发表时间:2012-3-6 15:21:36文章作者:admin 浏览次数:908第一届(1994年)全国大学生电子设计竞赛A.简易数控直流电源B.多路数据采集系统第二届(1995年)全国大学生电子设计竞赛A.实用低频功率放大器B.实用信号源的设计和制作C.简易无线电遥控系统D.简易电阻、电容和电感测试仪第三届(1997年)全国大学生电子设计竞赛A.直流稳定电源B.简易数字频率计C.水温控制系统D.调幅广播收音机第四届(1999年)全国大学生电子设计竞赛A.测量放大器B.数字式工频有效值多用表C.频率特性测试仪D.短波调频接收机E.数字化语音存储与回放系统第五届(2001年)全国大学生电子设计竞赛A.波形发生器B.简易数字存储示波器C.自动往返电动小汽车D.高效率音频功率放大器E.数据采集与传输系统F.调频收音机第六届(2003年)全国大学生电子设计竞赛A.电压控制LC振荡器B.宽带放大器C.低频数字式相位测量仪D.简易逻辑分析仪E.简易智能电动车F.液体点滴速度监控装置第七届(2005年)全国大学生电子设计竞赛A.正弦信号发生器B.集成运放测试仪C.简易频谱分析仪D.单工无线呼叫系统E.悬挂运动控制系统F.数控恒流源G.三相正弦波变频电源第八届(2007年)全国大学生电子设计竞赛A.音频信号分析仪B.无线识别C.数字示波器D.程控滤波器E.开关稳压电源F.电动车跷跷板G.积分式直流数字电压表H.信号发生器I.可控放大器J.电动车跷跷板第九届(2009年)全国大学生电子设计竞赛A.光伏并网发电模拟装置B.声音导引系统C.宽带直流放大器D.无线环境监测模拟装置E.电能收集充电器F.数字幅频均衡功率放大器G.低频功率放大器H.LED点阵书写显示屏I.模拟路灯控制系统。
2019电赛题目类型分类摘要:一、引言二、电赛简介1.电赛背景2.电赛目的三、2019 年电赛题目类型1.电源类题目2.信号类题目3.控制系统类题目4.通信类题目5.仪器仪表类题目四、各类题目特点及难点1.电源类题目特点及难点2.信号类题目特点及难点3.控制系统类题目特点及难点4.通信类题目特点及难点5.仪器仪表类题目特点及难点五、针对不同类型题目的备赛建议1.电源类题目备赛建议2.信号类题目备赛建议3.控制系统类题目备赛建议4.通信类题目备赛建议5.仪器仪表类题目备赛建议六、总结正文:一、引言全国大学生电子设计竞赛(简称电赛)是我国面向大学生的一项重要电子科技竞赛活动,旨在培养大学生的创新能力和实践能力。
2019 年电赛已经落下帷幕,本文将对2019 年电赛题目类型进行分类及解析,为新一届电赛参赛者提供参考。
二、电赛简介电赛自1997 年创办以来,已经发展成为一项具有广泛影响力的竞赛。
它不仅考验参赛者的理论知识,更注重考查其实际动手能力和解决实际问题的能力。
电赛题目来源于实际工程问题,要求参赛者综合运用所学知识进行分析和设计。
1.电赛背景全国大学生电子设计竞赛是由教育部主管,各省市教育部门和各高校共同主办的全国性竞赛。
竞赛分为省赛和全国赛两个阶段,省赛选拔出的优秀队伍晋级全国赛。
2.电赛目的电赛旨在培养大学生的创新能力和实践能力,提高电子科技人才的综合素质,推动我国电子信息产业的发展。
三、2019 年电赛题目类型2019 年电赛题目类型主要包括电源类、信号类、控制系统类、通信类和仪器仪表类。
1.电源类题目电源类题目主要考察参赛者对直流稳压电源、交流稳压电源和逆变器等电源设备的原理和设计能力。
这类题目需要参赛者掌握电源变换器的工作原理、电路拓扑、控制策略等方面的知识。
2.信号类题目信号类题目涉及信号放大、滤波、变换、调制与解调等方面,要求参赛者具备对信号处理的基本原理和实际应用的掌握。
这类题目通常需要参赛者设计特定的信号处理电路或系统,以满足特定的性能要求。
2019年全国大学生电子设计竞赛试题参赛注意事项(1)8月7日8:00竞赛正式开始。
本科组参赛队只能在【本科组】题目中任选一题;高职高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。
(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。
(3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生身份的有效证件(如学生证)随时备查。
(4)每队严格限制3人,开赛后不得中途更换队员。
(5)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设计制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违纪参赛队取消评审资格。
(6)8月10日20:00竞赛结束,上交设计报告、制作实物及《登记表》,由专人封存。
模拟电磁曲射炮(H题)【本科组】一、任务自行设计并制作一模拟电磁曲射炮(以下简称电磁炮),炮管水平方位及垂直仰角方向可调节,用电磁力将弹丸射出,击中目标环形靶(见图3),发射周期不得超过30秒。
电磁炮由直流稳压电源供电,电磁炮系统内允许使用容性储能元件。
引二、要求电磁炮与环形靶的位置示意如图1及图2所示。
电磁炮放置在定标点处,炮管初始水平方向与中轴线夹角为0°、垂直方向仰角为0°。
环形靶水平放置在地面,靶心位置在与定标点距离200cm≤d≤300cm,与中心轴线夹角a≤±30°的范围内。
1.基本要求(1)电磁炮能够将弹丸射出炮口。
(2)环形靶放置在靶心距离定标点200~300cm间,且在中心轴线上的位置处,键盘输入距离d值,电磁炮将弹丸发射至该位置,距离偏差的绝对值不大于50cm。
(3)用键盘给电磁炮输入环形靶中心与定标点的距离d及与中心轴线的偏离角度a,一键启动后,电磁炮自动瞄准射击,按击中环形靶环数计分;若脱靶则不计分。
2.发挥部分(1)在指定范围内任意位置放置环形靶(有引导标识,参见说明2),一键启动后,电磁炮自动搜寻目标并炮击环形靶,按击中环形靶环数计分,完成时间≤30s。
2019年全国大学生电子设计竞赛综合测评题综合测评注意事项(1)综合测评于2019 年8 月19 日8:00 正式开始,8 月19 日15:00 结束。
(2)本科组和高职高专组优秀参赛队共用此题。
(3)综合测评以队为单位采用全封闭方式进行,现场不能上网、不能使用手机。
(4)综合测评结束时,制作的实物及《综合测评测试记录与评分表》由全国专家组委派的专家封存,交赛区保管。
多信号发生器使用题目制定综合测评板上的一片LM324AD(四运放)和一片SN74LS00D(四与非门)芯片设计制作一个多路信号发生器,如下图所示。
设计报告应给出方案设计、详细电路图、参数计算和现场自测数据波形(一律手写),综合测评板编号及3个参赛同学签字需在密封线内,限2页,与综合测评板一同上交。
u o1U o1————方波U o2————占空比连续可调窄脉冲U o3————正弦波U o4————余弦波一.约束条件1.一片SN74L.S0OD四与非门芯片(综合测评板上自带);2. 一片LM324AD四运算放大器芯片(综合测评板上自带);3.赛区提供固定电阻、固定电容、可变电阻元件(数量不限、参数不限);4.赛区提供直流电源。
二.设计任务及指标要求利用综合测评板和若干电阻、电容元件,设计制作电路产生下列四路信号:1.频率为19kHz~2IkHz连续可调的方波脉冲信号,幅度不小于3.2V;2.与方波同频率的正弦波信号,输出电压失真度不大于5%,峰-峰值(Vpp)不小于1V;3.与方波同频率占空比5%~15%连续可调的窄脉冲信号,幅度不小于3.2V;4.与正弦波正交的余弦波信号,相位误差不大于5°,输出电压峰-峰值(Vpp)不小于1V。
各路信号输出必须引至测评板的标注位置并均需接1kΩ负载电阻(R L),要求在引线贴上所属输出信号的标签,便于测试。
三.说明1.综合测评应在模电或数电实验室进行,实验室提供常规仪器仪表和工具;2. SN74LS00D和LM324AD芯片使用说明书随综合测评板并提供;3.参赛队应在理论设计基础上进行实验调试,理论设计占一定分值,各部分分数(包括理论设计)分配为:方波占10分、正弦波占8分、窄脉冲占6分、正交的余弦波占6分;4.不允许在测评板上增加使用IC芯片,如果增加芯片则按0分记;5.原则上不允许在测评板上增加使用BJT、FET和二极管,如果增加则按3分/只扣分;6.原则上不允许参赛队更换测评板,如果损坏测评板只可更换一次并扣10分;7.各路信号测试应在电路互联且加负载情况下进行,单独模块测试相应得分减半;8.本科组只允许使用单一+5V电源,增加使用直流电源的扣除10分。
机器人巡线教程机器人巡线是一种在机器人技术中常见的任务,它涉及到使用机器视觉、图像处理和运动控制等领域的知识。
本教程将指导您完成机器人巡线的任务,包括硬件和软件的设置和调试。
机器人平台:为了进行巡线,您需要一个具有轮子的机器人平台。
将控制器连接到计算机,以便您可以在计算机上远程控制机器人。
安装传感器并连接到控制器。
确保传感器能够正确地检测到线条。
安装并配置您的机器人控制软件,例如ROS(Robot Operating System)。
编写或使用现有的巡线算法。
这些算法通常会利用传感器数据来控制机器人的移动,使其保持在线条上。
将算法集成到您的控制软件中,以便实时控制机器人的移动。
测试您的巡线算法,确保它能够正确地检测到线条并控制机器人沿其移动。
根据测试结果调整算法的参数,优化机器人的巡线性能。
例如,调整机器人的速度、转向灵敏度等。
如果需要,您还可以使用更高级的图像处理技术,例如特征检测或深度学习,以提高巡线的准确性和鲁棒性。
本教程提供了关于机器人巡线的基本指导,包括硬件和软件的设置以及调试过程。
完成本教程后,大家将能够掌握机器人巡线的基本技能,并可以根据需要进行进一步的优化和改进。
请注意,这只是一个基本的教程,具体的实现细节可能因大家的硬件和软件环境而异。
机器人巡线比赛是一项基于机器人技术的竞技比赛,旨在培养参赛者对自动化控制理论的理解,检测其编程和操作技能。
在这个比赛中,参赛者需要设计和操作一台机器人,使其能够在规定的赛道上自动巡航。
赛道设定:比赛采用单赛道模式,赛道由黑白相间的直线和曲线组成,复杂程度视参赛队伍的等级而定。
机器人规格:机器人必须是自主设计、编程和制造的,且不能使用任何形式的遥控或人工干预。
机器人必须能够在赛道上稳定运行,并按照规定的路线进行巡航。
操作限制:参赛者只能使用预先安装在机器人上的传感器和执行器进行操作。
在比赛过程中,参赛者不能对传感器和执行器进行任何形式的修改或更换。
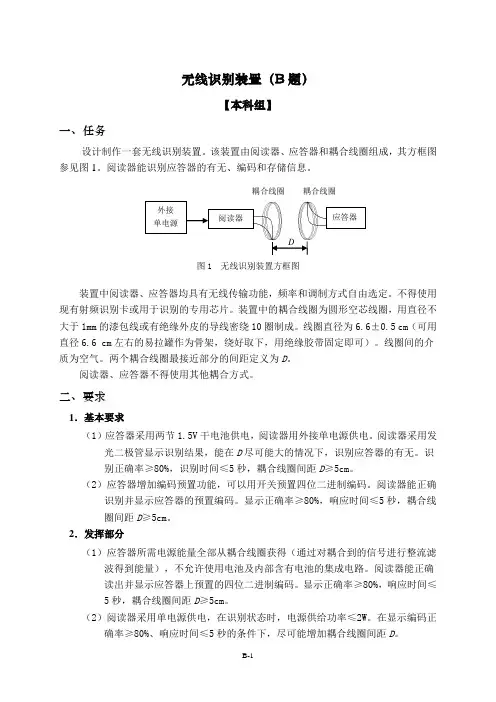
无线识别装置(B题)【本科组】一、任务设计制作一套无线识别装置。
该装置由阅读器、应答器和耦合线圈组成,其方框图参见图1。
阅读器能识别应答器的有无、编码和存储信息。
D图1 无线识别装置方框图装置中阅读器、应答器均具有无线传输功能,频率和调制方式自由选定。
不得使用现有射频识别卡或用于识别的专用芯片。
装置中的耦合线圈为圆形空芯线圈,用直径不大于1mm的漆包线或有绝缘外皮的导线密绕10圈制成。
线圈直径为6.6±0.5 cm(可用直径6.6 cm左右的易拉罐作为骨架,绕好取下,用绝缘胶带固定即可)。
线圈间的介质为空气。
两个耦合线圈最接近部分的间距定义为D。
阅读器、应答器不得使用其他耦合方式。
二、要求1.基本要求(1)应答器采用两节1.5V干电池供电,阅读器用外接单电源供电。
阅读器采用发光二极管显示识别结果,能在D尽可能大的情况下,识别应答器的有无。
识别正确率≥80%,识别时间≤5秒,耦合线圈间距D≥5cm。
(2)应答器增加编码预置功能,可以用开关预置四位二进制编码。
阅读器能正确识别并显示应答器的预置编码。
显示正确率≥80%,响应时间≤5秒,耦合线圈间距D≥5cm。
2.发挥部分(1)应答器所需电源能量全部从耦合线圈获得(通过对耦合到的信号进行整流滤波得到能量),不允许使用电池及内部含有电池的集成电路。
阅读器能正确读出并显示应答器上预置的四位二进制编码。
显示正确率≥80%,响应时间≤5秒,耦合线圈间距D≥5cm。
(2)阅读器采用单电源供电,在识别状态时,电源供给功率≤2W。
在显示编码正确率≥80%、响应时间≤5秒的条件下,尽可能增加耦合线圈间距D。
(3)应答器增加信息存储功能,其存储容量大于等于两个四位二进制数。
装置断电后,应答器存储的信息不丢失。
无线识别装置具有在阅读器端写入、读出应答器存储信息的功能。
(4)其他。
三、说明设计报告正文中应包括系统总体框图、核心电路原理图、主要流程图、主要的测试结果。
2019年9月全国机器人等级考试四级(有答案)一、单选题(共20题,共80分)1.关于NPN型三极管,说法错误的是(B)。
A三级管是一种电流控制半导体器件B它的三根接脚分别是基极,接收极,发射极C它的发射极要接地D它的导通要在基极加一个正的电压2.下图程序中,串口监视器输出的值可能是(C)。
A 0.B 2.7.C 2.D 33.在机器人制作中,“超声波传感器-Arduino控制板-马达”可以对应人体的B)部位。
A大脑-腿-眼睛B眼睛-大脑-腿C大脑-眼睛-腿D眼睛-腿-大脑4.以下四个符号中属于赋值运算符的是(C)。
A ++。
B ==。
C =。
D!5.关于“数字信号”和“模拟信号”的概念错误的是(C)。
A模仿旌旗灯号是在时间和数值上均具有连续性的旌旗灯号B数字信号是在时间和数值上均具有离散性的信号C Arduino中1或这样的数值反应的是模拟信号D电位器、光敏电阻反馈的是模拟信号6.程序指令delay(1000);的意思是(B)。
A延时1000微秒B延时1000毫秒C延时1000秒D延时1000周期7.电路搭建如下,当光映照光敏电阻时,随着光照强度的增加,analogRead(A0)的返回值会(A)变化。
A随着光照强度增加而减少B随着光照强度增加而增加C不随光的变化而变化D随光的变化做无规则变化8.如图所示,有一盏红色LED小灯,已知它的工作电压为1.7V,工作电流是30mA。
我们想用Arduino点亮该LED小灯,相干Arduino代码如下则实际上,所串联的电阻合理的是(C)。
A 10ΩB 30ΩC 110ΩD 480Ω9.在Arduino的C语言编程中,0xFFE210表示的是(C)。
A一个变量B一个函数C一个16进制的数D一个2进制数10.电路搭建如图,当程序履行analogWrite(3,256)后,下列描述精确的选项是(A)。
A LED灯熄灭B LED灯点达到最亮C LED灯亮度不断变化D LED灯烧毁11.对程序指令描述精确的选项是(D)。
A BC D2019年全国大学生电子设计竞赛试题参赛注意事项(1)8月7日8:00竞赛正式开始。
本科组参赛队只能在【本科组】题目中任选一题;高职高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。
(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。
(3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生身份的有效证件(如学生证)随时备查。
(4)每队严格限制3人,开赛后不得中途更换队员。
(5)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设计制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违纪参赛队取消评审资格。
(6)8月10日20:00竞赛结束,上交设计报告、制作实物及《登记表》,由专人封存。
电动小车动态无线充电系统(A题)【本科组】一、任务设计并制作一个无线充电电动小车及无线充电系统,电动小车可采用成品车改制,全车重量不小于250 g,外形尺寸不大于30cm×26cm,圆形无线充电装置发射线圈外径不大于20cm。
无线充电装置的接收线圈安装在小车底盘上,仅采用超级电容(法拉电容)作为小车储能、充电元件。
如图1所示,在平板上布置直径为70cm的黑色圆形行驶引导线(线宽≤2cm),均匀分布在圆形引导线上的A、B、C、D点(直径为4cm的黑色圆点)上分别安装无线充电装置的发射线圈。
无线充电系统由1台5V的直流稳压电源供电,输出电流不大于1A。
图1 电动小车行驶区域示意图二、要求1. 基本要求(1)小车能通过声或光显示是否处在充电状态。
(2)小车放置在A点,接通电源充电,60秒时断开电源,小车检测到发射线圈停止工作自行起动,沿引导线行驶至B点并自动停车。
(3)小车放置在A点,接通电源充电,60秒时断开电源,小车检测到发射线圈停止工作自行起动,沿引导线行驶直至停车(行驶期间,4个发射线圈均不工作),测量小车行驶距离L1,L1越大越好。
2019年全国大学生电子设计竞赛简易电路特性测试仪(D题)2019年8月7日摘要本系统以STM32为核心控制芯片,通过单片机对信号产生模块、电子开关模块、AD采样模块等控制,实现对放大器电路的相关电路特性的测量。
信号产生模块利用DDS技术,选用成熟稳定的DDS模块AD9851产生信号波形,通过单片机技术采样和处理电路相关参数,且在被测放大器电路前后级进行阻抗隔离。
系统可自动完成相应功能,并且在oled中显示结果。
关键字:STM32;DDS技术;单片机技术;阻抗隔离目录1系统方案 (1)1.1主要模块的论证与选择 (1)1.2系统组成及实现方法 (2)2系统分析与计算 (2)2.1系统理论分析...........................................................................错误!未定义书签。
2.2误差分析 (5)3电路与程序设计 (6)3.1主要电路的设计 (6)3.2程序的设计 (6)4测试结果 (7)4.1测试条件与仪器 (7)4.2测试结果及分析 (7)简易电路特性测试仪(D题)【本科组】1系统方案由题意,使该电路测试仪能满足题目所要求的相应功能,结合题目的精度要求,本系统由信号产生模块、液晶显示模块、键盘输入模块、A/D采集模块、辅助电源模块和单片机控制模块等组成。
1.1主要模块的论证与选择1.信号产生模块方案一:采用正弦波振荡电路。
使用振荡电路产生正弦波电路较简单,满足一定的参数条件即可起振,但缺点是很难稳定输出波形,另外输出正弦波形失真较大、频率有限。
方案二:采用先进的DDS技术。
利用DDS专用芯片产生信号,可根据需求对芯片编程控制设计出任意的信号波形,具有频率分辨率高、转换速度高、信号纯度高、输出波形无电流脉冲叠加等优势。
在对题目进行仔细分析后,DDS模块最高可产生100MHz 的信号且实现容易,可满足题目要求的上限频率范围,提高可靠性,符合产品设计的思路。
2019年全国大学生电子设计竞赛试题参赛注意事项(1)8月7日8:00竞赛正式开始。
本科组参赛队只能在【本科组】题目中任选一题;高职高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。
(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。
(3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生身份的有效证件(如学生证)随时备查。
(4)每队严格限制3人,开赛后不得中途更换队员。
(5)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设计制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违纪参赛队取消评审资格。
(6)8月10日20:00竞赛结束,上交设计报告、制作实物及《登记表》,由专人封存。
双路语音同传的无线收发系统(G 题)【本科组】一、任务设计制作一个双路语音同传的无线收发系统,实现在一个信道上同时传输两路话音信号。
系统的示意图如图1所示。
图1 双路语音同传无线收发系统示意图二、要求1. 基本要求(1) 制作一套FM 无线收发系统。
其中,FM 信号的载波频率设定为语音输出A双路语音分离处理FM 解调语音输出B 语音输入A FM 调制双路语音同传合路处理语音输入B48.5MHz ,相对误差的绝对值不大于1‰;峰值频偏不大于25kHz ;天线长度不大于0.5m 。
(2) 通过FM 无线收发系统任意传输一路语音信号A 或者B ,语音信号的带宽不大于3400Hz 。
要求无线通信距离不小于2m ,解调输出的语音信号波形无明显失真。
(3) 通过FM 无线收发系统同时传输双路语音信号A 和B 。
要求无线通信距离不小于2m ,解调输出的双路语音信号波形无明显失真。
2. 发挥部分(1) 要求设计制作的发射电路中FM 信号的载波频率能通过一个电压信号()C v t 进行调节,用来模拟无线通信中载波频率漂移的情况。
1 正弦波功率输出装置一、任务设计并制作一个正弦波功率输出装置。
二、要求1、基本要求①输入为单相市电;②输出频率范围为20Hz~100Hz的交流电,输出电压有效值为36V,负载为阻性负载;③输出电压波形应尽量接近正弦波,用示波器观察无明显失真;④当输入电压为198V~242V,负载电流有效值为0.1~2A时,输出电压有效值应保持在36V,误差的绝对值小于5%;⑤具有过流保护(输出电流有效值大于3A时动作),保护时自动切断输入交流电源。
2、发挥部分①当输入电压为198V~242V,负载电流有效值为0.5~3A时,输出电压有效值应保持在36V,误差的绝对值小于1%;②设计制作具有测量、显示该装置输出电压、电流、频率和功率的电路,测量误差的绝对值小于5%;③其它。
2 程控交流电压源1、基本要求(1)单、三相电压均可独立可调,每相输出电压30-150V程控连续可调,步进1V;(2)输出频率200-800Hz程控连续可调,步进1Hz;(3)每相输出功率不小于10W;(4)输出电压精度:±0.5V,输出频率精度:±1Hz;(5)波形失真度:<1%;(6)显示电压、频率精确到小数点后一位;(7)通讯方式自选。
2、发挥部分(1)三相交流程控电压源输出电压范围:5V-180V;(2)三相交流程控电压源每相输出功率:不小于20W;(3)三相交流程控电压源输出电压精度:±0.1V;(4)其它。
3 智能搬运小车一、设计任务设计并制作一个能自动搬运货物的智能电动车,其工作示意图如下。
图中,左边为停车区、货物存储区A 和货物存储区B,并有两个对应的射灯光源;距右边线30 cm 处共放置3 片白色或黑色的薄铁片,铁片之间的距离大于20cm。
二、要求1、基本要求(1)智能车从起跑线出发(车体不得超过起跑线),在无障碍物的情况下,可寻找并搬取铁片,按照不同颜色分送不同存储区,即在光源A 的引导下将黑色铁片搬运到货物存储区A 存放,或在光源B 的引导下将白色铁片搬运到存储区B 存放(装载方式不限制)。
2019年全国大学生电子设计竞赛试题
参赛注意事项
(1)8月7日8:00竞赛正式开始。
本科组参赛队只能在【本科组】题目中任选一题;高职高专组参赛队在【高职高专组】题目中任选一题,也可以选择【本科组】题目。
(2)参赛队认真填写《登记表》内容,填写好的《登记表》交赛场巡视员暂时保存。
(3)参赛者必须是有正式学籍的全日制在校本、专科学生,应出示能够证明参赛者学生身份的有效证件(如学生证)随时备查。
(4)每队严格限制3人,开赛后不得中途更换队员。
(5)竞赛期间,可使用各种图书资料和网络资源,但不得在学校指定竞赛场地外进行设计制作,不得以任何方式与他人交流,包括教师在内的非参赛队员必须迴避,对违纪参赛队取消评审资格。
(6)8月10日20:00竞赛结束,上交设计报告、制作实物及《登记表》,由专人封存。
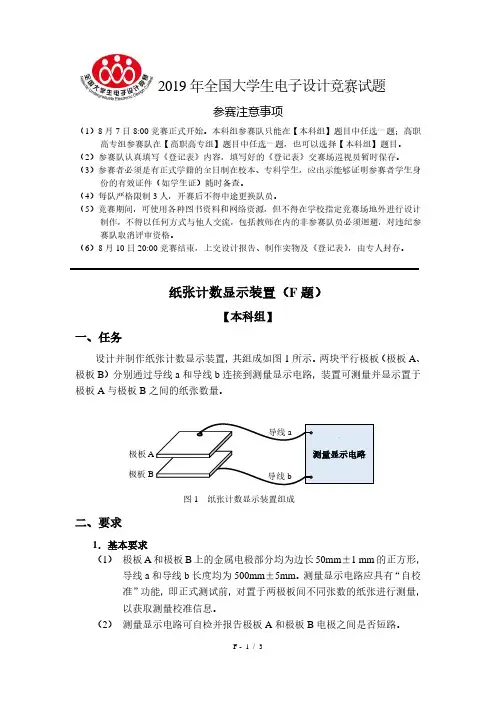
巡线机器人(B题)
【本科组】
一、任务
设计一基于四旋翼飞行器的巡线机器人,能够巡检电力线路及杆塔状态
(见图1),发现异常时拍摄存储,任务结束传送到地面显示装置上显示。
巡线机器人中心位置需安装垂直向下的激光笔,巡线期间激光笔始终工作,以标识航迹。
二、要求
1.基本要求
(1)巡线机器人从距A杆塔1米范围内的起飞点起飞,以1米定高绕杆巡检,巡检流程为:起飞→杆塔A→电力线缆→绕杆塔B→电力线缆→
杆塔A,然后稳定降落;巡检期间,巡线机器人激光笔轨迹应落在地
面虚线框内。
(2)从起飞到降落,巡线完成时间不得大于150秒,巡线时间越短越好。
(3)发现线缆上异物(黄色凸起物),巡线机器人须在与异物距离不超过30cm的范围内用声或光提示。
图1 杆塔与线缆示意图图2 杆塔B二维码示意
2.发挥部分
(1)拍摄所发现线缆异物上的条形码图片存储到SD卡,巡检结束后在显示装置上清晰显示,并能用手机识别此条形码内容。
(2)发现并拍摄杆塔B上的二维码图片存储到SD卡,巡检结束后在显示装置上清晰显示,并能用手机识别此二维码内容。
(3)拍摄每张条形码、二维码图片存储的照片数不得
超过3张。
(4)停机状况下,在巡线机器人某一旋翼轴下方悬挂
一质量为100g的配重,然后巡线机器人在图3
所示环形圆板上自主起飞,并在1米高度平稳悬
停10秒以上,且摆动范围不得大于±25cm。
(5)在测试现场随机选择一个简单飞行动作任务,30
分钟内现场编程调试完成飞行动作。
图3 环形圆板(6)其他。
三、说明
1. 电力线缆与杆塔说明
(1)线缆的直径不大于5mm,颜色为黑色。
(2)杆塔高度约150cm,直径不大于30mm。
(3)线缆上异物上粘贴有圆环状的黄底黑色8位数条形码,条形码宽度约30±2mm,见图4。
图4 条形码示例图5 二维码示例
(4)线缆上的异物为黄色(红绿蓝三原色参数为:R-255,G-255,B-0),直径约30±2mm,长度约50±5mm。
(5)二维码粘贴在杆塔B上与线缆连接处外侧,大小30±3mm见方,见图5。
2.巡线机器人要求:
(1)参赛队所用飞行器应遵守中国民用航空局的管理规定(《民用无人驾驶航空器实名制登记管理规定》,编号:AP-45-AA-2017-03)。
(2)四旋翼飞行器最大轴间距不大于420mm。
(3)为确保安全,飞行器桨叶须全防护(防护圈将飞行器或桨叶全包),否则不得测试;测试区应设置防护网。
(4)巡线机器人不得有“无线通信及遥控”功能。
(5)除飞行器机械构件、飞行控制(电调)、摄像功能模块外,巡线机器人其他功能的实现不得采用飞行器集成商提供的组件,必须自主设计完
成。
(6)激光笔可采用悬挂等软连接方式。
3. 测试流程说明
(1)起飞前,飞行器可手动放置到起飞点;可手动控制起飞;起飞后整个巡检过程中不得人为干预。
(2)从基本部分(1)到发挥部分(3)的巡线工作须一次连续完成,期间不得人为干预,也不得更换电池;允许测试2次,按最好成绩记录;
两次测试间可更换电池。
(3)发挥部分(1)、(2)中拍摄的条形码及二维码图片存储在存储介质(如SD卡)中,巡线完成后在地面显示装置上读取显示,用手机识别;手
机及显示装置作为作品的组成部分,必须与作品一起封存。
(4)在巡线区地面标识±60cm区域,见图1,巡线机器人巡检航迹可参照激光笔光点轨迹摄像判定。
(5)基本部分(1)到发挥部分(3)测试完成后,进行发挥部分(4)测试;
增加配重后,不得自行另加其他配重。
(6)现场编程实现的任务在所有其他测试工作(包括“其他”项目)完成之后进行。
编程调试超时判定任务未完成;编程调试时间计入成绩。
编程下载工具必须与作品一起封存。
(7)测试现场应避免窗外强光直接照射,避免高照度点光源照明;尽量采用多点分布式照明,以减小飞行器自身投影的影响。
(8)飞行场地地面可采用图6所示灰白条纹纸质材料铺设。
灰白条纹各宽20mm,灰色的红绿蓝三原色参数为:R-178,G-178,B-178。
图6 地面敷设材料图案
(9)飞行期间,飞行器触及地面后自行恢复飞行的,酌情扣分;触地后5秒内不能自行恢复飞行视为失败,失败前完成动作仍有效。
(10)平稳降落是指在降落过程中无明显的跌落、弹跳及着地后滑行等情况出现。
(11)调试及测试时必须佩带防护眼镜,穿戴防护手套。
四、评分标准。