乐高机器人初级课程图文稿
- 格式:docx
- 大小:21.06 KB
- 文档页数:6

•课程介绍与目标•乐高EV3基础知识•机器人搭建与拆卸技巧•编程基础与实例分析•进阶编程技巧探讨•项目实践:创意机器人设计挑战•课程总结与展望未来目录01课程介绍与目标乐高EV3简介课程目标与期望成果课程目标期望成果适用人群及学习建议适用人群本课程适合对机器人和编程感兴趣的学生,年龄范围广泛,可根据学生的实际情况进行适当调整。
学习建议学生在学习本课程前,最好具备一定的数学和英语基础,以便更好地理解和应用相关知识。
同时,学生需要保持积极的学习态度和耐心,认真完成每一项任务和挑战,不断积累经验和提升自己的能力。
02乐高EV3基础知识EV3控制器功能操作界面控制器连接030201EV3控制器功能及操作界面电机与传感器类型及使用电机类型传感器类型电机与传感器使用编程环境与软件安装软件安装编程环境从乐高官网下载按照提示进行安装。
编程界面介绍03机器人搭建与拆卸技巧阅读搭建指南认真阅读乐高EV3的搭建指南,了解机器人的结构设计和搭建步骤。
了解EV3组件熟悉乐高EV3套装中的各种组件,包括电机、传感器、连接件、装饰件等。
准备工具准备好所需的工具,如螺丝刀、扳手等,以便在搭建过程中使用。
搭建前的准备工作机器人结构设计与实现设计机器人结构根据搭建指南和自己的创意,设计机器人的结构,包括底盘、电机、传感器等部分的布局和连接方式。
搭建机器人按照设计好的结构,逐步搭建机器人,注意连接件的紧固和电机的安装。
测试机器人完成搭建后,对机器人进行测试,确保各部分功能正常,如电机转动、传感器响应等。
1 2 3拆卸顺序注意安全保管好组件拆卸方法及注意事项04编程基础与实例分析编程概念引入:顺序、循环和条件判断顺序结构01循环结构02条件判断03图形化编程界面介绍及操作演示界面布局介绍EV3软件界面各部分功能及布局。
编程步骤演示创建新项目、添加程序块、连接程序块等基本操作。
程序下载与运行讲解如何将编写好的程序下载到EV3机器人上,并控制机器人运行。
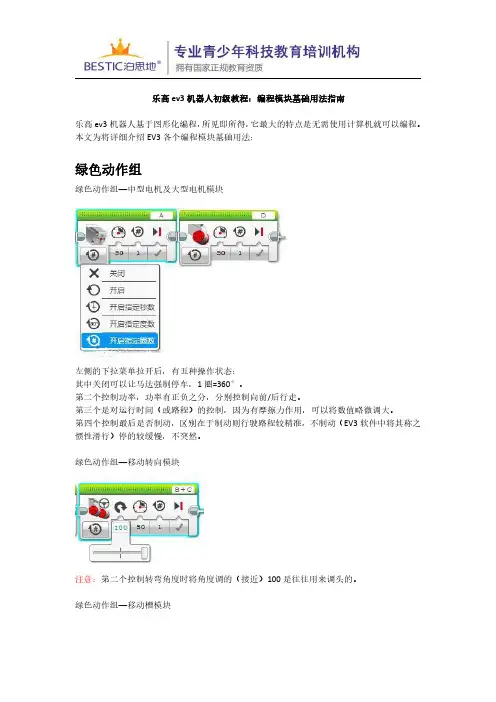
乐高ev3机器人初级教程:编程模块基础用法指南乐高ev3机器人基于图形化编程,所见即所得,它最大的特点是无需使用计算机就可以编程。
本文为将详细介绍EV3各个编程模块基础用法:绿色动作组绿色动作组—中型电机及大型电机模块左侧的下拉菜单拉开后,有五种操作状态:其中关闭可以让马达强制停车,1圈=360°。
第二个控制功率,功率有正负之分,分别控制向前/后行走。
第三个是对运行时间(或路程)的控制,因为有摩擦力作用,可以将数值略微调大。
第四个控制最后是否制动,区别在于制动则行驶路程较精准,不制动(EV3软件中将其称之惯性滑行)停的较缓慢,不突然。
绿色动作组—移动转向模块注意:第二个控制转弯角度时将角度调的(接近)100是往往用来调头的。
绿色动作组—移动槽模块相当于把两个大型电机模块拼在一块。
绿色动作组—显示模块第二个擦除屏幕的意思是显示新的内容前,擦去旧的,系统默认擦除屏幕。
大写的X和Y组合形成一个点,X,Y分别代表屏幕上的坐标系中的横坐标和纵坐标,X=0,Y=0时则说明此时图像将显示在坐标(即屏幕)中心上。
绿色动作组—声音模块注意:这里最右侧下拉框的等待完成是可以阻塞程序的。
绿色动作组—程序块状态灯模块控制灯亮不亮,亮的话是什么颜色,闪不闪烁。
橙色流程控制组橙色流程控制组—开始模块在将EV3主机与电脑连接后,单击绿三角可以使主机自动运行程序。
橙色流程控制组—等待模块等待模块有两类用法:第一个是等某个时间再进行第二个就是结合传感器数值做出逻辑判断,最右侧多数输出的是逻辑的真或伪,不是具体数值,这里必须注意。
注意:31313配的那个测距离的传感器叫红外传感器别搞错了。
特别注意:后面的黄色传感器组也有比较真实测量值与设定值输出逻辑关系的功能,差别大体上在是否阻碍程序。
橙色流程控制组—循环模块循环模块内部的模块会按照设定重复执行。
时间和计数退出就是到了就自动退出。
逻辑退出:假如事先设定逻辑判定为真时退出,连线接入判定口(最右侧的那个)后如果输出真,则退出;反之亦然。
乐高ev3机器人初级教程:编程模块基础用法指南乐高ev3机器人基于图形化编程,所见即所得,它最大的特点是无需使用计算机就可以编程。
本文为将详细介绍EV3各个编程模块基础用法:绿色动作组绿色动作组—中型电机及大型电机模块左侧的下拉菜单拉开后,有五种操作状态:其中关闭可以让马达强制停车,1圈=360°。
第二个控制功率,功率有正负之分,分别控制向前/后行走。
第三个是对运行时间(或路程)的控制,因为有摩擦力作用,可以将数值略微调大。
第四个控制最后是否制动,区别在于制动则行驶路程较精准,不制动(EV3软件中将其称之惯性滑行)停的较缓慢,不突然。
绿色动作组—移动转向模块注意:第二个控制转弯角度时将角度调的(接近)100是往往用来调头的。
绿色动作组—移动槽模块相当于把两个大型电机模块拼在一块。
绿色动作组—显示模块第二个擦除屏幕的意思是显示新的内容前,擦去旧的,系统默认擦除屏幕。
大写的X和Y组合形成一个点,X,Y分别代表屏幕上的坐标系中的横坐标和纵坐标,X=0,Y=0时则说明此时图像将显示在坐标(即屏幕)中心上。
绿色动作组—声音模块注意:这里最右侧下拉框的等待完成是可以阻塞程序的。
绿色动作组—程序块状态灯模块控制灯亮不亮,亮的话是什么颜色,闪不闪烁。
橙色流程控制组橙色流程控制组—开始模块在将EV3主机与电脑连接后,单击绿三角可以使主机自动运行程序。
橙色流程控制组—等待模块等待模块有两类用法:第一个是等某个时间再进行第二个就是结合传感器数值做出逻辑判断,最右侧多数输出的是逻辑的真或伪,不是具体数值,这里必须注意。
注意:31313配的那个测距离的传感器叫红外传感器别搞错了。
特别注意:后面的黄色传感器组也有比较真实测量值与设定值输出逻辑关系的功能,差别大体上在是否阻碍程序。
橙色流程控制组—循环模块循环模块内部的模块会按照设定重复执行。
时间和计数退出就是到了就自动退出。
逻辑退出:假如事先设定逻辑判定为真时退出,连线接入判定口(最右侧的那个)后如果输出真,则退出;反之亦然。
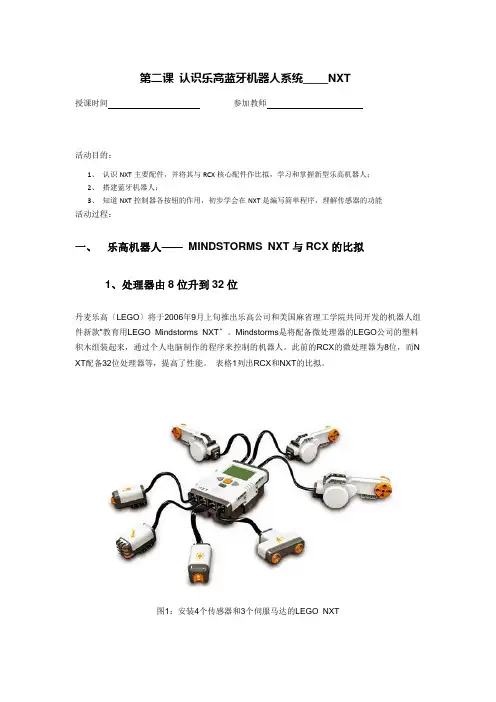
第二课认识乐高蓝牙机器人系统____NXT授课时间参加教师活动目的:1、认识NXT主要配件,并将其与RCX核心配件作比拟,学习和掌握新型乐高机器人;2、搭建蓝牙机器人;3、知道NXT控制器各按钮的作用,初步学会在NXT是编写简单程序,理解传感器的功能活动过程:一、乐高机器人——MINDSTORMS NXT与RCX的比拟1、处理器由8位升到32位丹麦乐高〔LEGO〕将于2006年9月上旬推出乐高公司和美国麻省理工学院共同开发的机器人组件新款“教育用LEGO Mindstorms NXT〞。
Mindstorms是将配备微处理器的LEGO公司的塑料积木组装起来,通过个人电脑制作的程序来控制的机器人。
此前的RCX的微处理器为8位,而N XT配备32位处理器等,提高了性能。
表格1列出RCX和NXT的比拟。
图1:安装4个传感器和3个伺服马达的LEGO NXT图4:LEGO NXT系统目前提供的4种传感器全家福5、改良了编程软件NXT程序用软件“R OBOLAB ver.2.9〞,跟ROBOLAB原来的版本一样,是基于NI LabVI EW开发的。
该软件不仅可以制作NXT用的程序,也可以完成RCX用的程序。
此前要操作接近4 00个图标进行编程,这次减少为约40个,从而使得编程更为简单。
OS为“Windows2000〞以上和“Mac OS X〞。
图5:乐高网站给出的ROBOLAB 2.9的样图,跟以前版本相比,变化较大二、快速认识NXT1、按钮NXT正面有四个按钮,它们分别是开关、运行;导航和返回。
2、NXT显示器上各图标的意义最上一行,相当于状态栏,从左到右依次表示了:蓝牙、USB、NXT控制器名、运行状态、电池电量以及声音音量的情况。
状态栏的下面是六个主控操作面板,相当于主菜单,它们依次是:“My Files我的文件〞、“Try me测试〞、“Settings设置〞、“Bluetooth蓝牙〞、“View查看〞、“NXT Progra m NXT程序〞。

乐高机器人初级课程集团文件版本号:(M928-T898-M248-WU2669-I2896-DQ586-M1988)
乐高机器人初级课程编号:295 发布时间:2011-08-18 截止日期:地区:
适合2-3个学生为一组搭建和编程设计机器人方案。
共431个组件的套装中包括一个NXT可编程的微型电脑,一块可充电的锂电池,三个伺服电机,二个触动传感器,一个光电传感器,一个超声波传感器,一个声音传感器,三个灯以及足够课堂教学所需的乐高积木。
另外还有3
根连接RCX传感器或马达的转换线,1根USB导线,以及分类盒和搭建手册等。
关健学习价值:
1.介绍机器人以及机械工程的概念。
2.收集、翻译数据,进行科学调查研究。
3.学习如何在团队工作中解决问题。
9797教育版和8527玩具版的分别:
9797 多了以下超级好用又超值的东西:
1. 多了玩具版没有的,一颗锂电池
2. 比玩具版多一个触觉传感器,所以有二个!!
3. 多了玩具版没有的,三个灯炮
乐高机器人中级课程
乐高机器人高级课程。