天线俯仰角
- 格式:docx
- 大小:13.64 KB
- 文档页数:8
创新实验课作业报告姓名:王紫潇苗成国学号:1121830101 1121830106专业:飞行器环境与生命保障工程课题意义:随着科学技术的迅猛发展,特别是航天科技成果不断向军事、商业领域的转化,航天科技得到了极大的发展,航天器机构朝着高精度、高可靠性的方向发展。
因此对航天机构的可靠性、精度、寿命等要求越来越高,对航天器机构精度的要求显得愈发突出,无论是航天器自身的工作,还是航天器在轨服务都对其精度有着严格的要求。
航天器中的外伸指向机构通常指的是星载天线机构,星载天线是航天器对地通信的主要设备,肩负着对地通信的主要任务,同时随着卫星导航的广泛应用,星载天线就愈发的重要起来,而其指向精度的要求就愈发的突出,指向精度不足,将会导致通信信号质量下降,卫星导航精度下降等结果。
民用方面移动通信和车载导航等,军用方面舰船导航、精确打击等这些都对星载天线的指向精度有着极高的依赖性。
因此,星载天线的指向精度是非常重要的。
要保证星载天线的指向精度,课题一双轴驱动机构转角到天线波束空间指向首先就是要确保星载天线驱动机构在地指向精度分析的正确性,只有这样才能对接下来的在轨指向精度分析和指向误差补偿进行分析。
星载天线驱动机构的末端位姿误差主要来源于机构的结构参数误差和热变形误差,这些误差是驱动机构指向误差最原始的根源,由于受实际生产加工装配能力和空间环境的限制,这些引起末端指向误差的零部件结构参数误差是必须进行合理控制的,引起结构参数变化的热影响因素是必须加以考虑的,只有这样才能使在轨天线驱动机构指向精度动态分析和误差补偿都得到较理想的结果。
纵观整个星载天线驱动机构末端位姿误差的分析,提出源于结构参数误差和热变形误差引起的星载天线驱动机构末端位姿误差的研究是必要的。
发展现状:星载天线最初大多是以固定形式与卫星本体相连的,仅仅通过增大天线波束宽度和覆盖面积来提高其工作范围,对其精度要求不是很高,但是随着航天科技的不断发展和市场需求的不断变化,这就要求,星载天线要具备一定的自由度,因此促使了星载天线双轴驱动机构的发展。
基站天线俯角和方位角测量方法1.目的。
规范测量方法、降低人为因素、提高系统质量。
2.适用范围。
此方法适用于所有摩托罗拉基站安装督导,检查工程师及现场安装工作人员。
3.天线俯角测量:3.1.根据设计院的设计文件以及客户优化资料提供的最新数据调整天线俯角,要求调整后的俯角度数与最新数据的误差为正负1度。
3.2.由于各天线厂家生产的天线型号、规格、形状不尽相同,测量者必须选择天线背面的平直面进行测量。
3.3.天线机械俯角的测量工具应为斜度测量仪(也称坡度仪)。
3.4.斜度测量仪(也称坡度仪)必须每年进行一次检验和校准。
3.5.测量者手握坡度仪安全站在天线的背后,用侧面紧靠在天线背面的平直面,取上、中、下三点进行测量,取三个测试数据值的平均值,精确到小数点后一位。
3.6. 电调天线的俯角是天线机械俯角与天线内置角或电调角之和。
3.7. 天线内置角度需从天线厂家或客户资料中获取;电调角度根据厂家使用说明用专用工具读取。
4. 天线方位角测量:4.1. 根据设计院的设计文件以及客户优化资料提供的最新数据调整天线方位角,要求调整后的方位角度数与最新数据的误差为正负5度。
4.2.由于各地基站的安装环境不同,天线安装方式也不尽相同,大致可分为:Ø落地铁塔、楼顶铁塔、楼顶简易铁塔、楼顶拉线铁塔、楼顶桅杆塔、楼顶增高架、楼顶墙沿桅杆、楼顶炮台桅杆。
根据不同的安装方式,确定不同的天线方位角测量方法。
4.3.天线方位角的测量工具应为指北针或地质罗盘仪。
指北针或地质罗盘仪必须每年进行一次检验和校准。
4.5.天线方位角测量原则:4.5.1.指北针或地质罗盘仪应尽量保持在同一水平面上。
4.5.2.指北针或地质罗盘仪必须与天线所指的正前方成一条直线。
4.5.3.指北针或地质罗盘仪应尽量远离铁体及电磁干扰源(例如各种射频天线、中央空调室外主机、楼顶铁塔、建筑物的避雷带、金属广告牌以及一些能产生电磁干扰的物体)。
4.6.建议测量方式(直角拐尺测量法)4.6.1.前方测量:在方位角的测量时,两人配合测量。
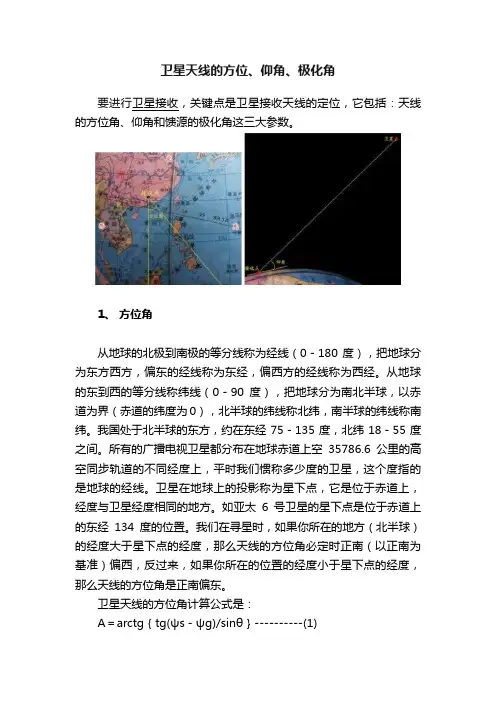
卫星天线的方位、仰角、极化角要进行卫星接收,关键点是卫星接收天线的定位,它包括:天线的方位角、仰角和馈源的极化角这三大参数。
1、方位角从地球的北极到南极的等分线称为经线(0-180度),把地球分为东方西方,偏东的经线称为东经,偏西方的经线称为西经。
从地球的东到西的等分线称纬线(0-90度),把地球分为南北半球,以赤道为界(赤道的纬度为0),北半球的纬线称北纬,南半球的纬线称南纬。
我国处于北半球的东方,约在东经75-135度,北纬18-55度之间。
所有的广播电视卫星都分布在地球赤道上空35786.6公里的高空同步轨道的不同经度上,平时我们惯称多少度的卫星,这个度指的是地球的经线。
卫星在地球上的投影称为星下点,它是位于赤道上,经度与卫星经度相同的地方。
如亚太6号卫星的星下点是位于赤道上的东经134度的位置。
我们在寻星时,如果你所在的地方(北半球)的经度大于星下点的经度,那么天线的方位角必定时正南(以正南为基准)偏西,反过来,如果你所在的位置的经度小于星下点的经度,那么天线的方位角是正南偏东。
卫星天线的方位角计算公式是:A=arctg{tg(ψs-ψg)/sinθ}----------(1)公式(1)中的ψg是接收站经度,ψs为卫星的经度,θ为接收站的纬度。
图1是卫星的方位角示意图。
方位角的调整方法很简单,首先用指南针找到正南方,天线方向正对正南方,如果计算的角度A是负值,则天线向正南偏西转动A度,如果A是正值,则天线向正南偏东方向转动A度。
即可完成方位角的调整。
2、仰角仰角是接收站所在地的地平面水平线于天线中心线所形成的角度,如图2所示。
仰角的计算公式是:. -----------------⑵仰角的调整最好是用量角器加上一个垂针作成的仰角调整专用工具进行调整。
方位角和仰角的调整顺序是,先调整好仰角,在调整方位角。
3、极化角国内或区域卫星一般都是线极化,线极化分为水平极化(以E‖表示)和垂直极化(以E⊥ 表示)。
创新实验课作业报告姓名:王紫潇苗成国学号:1121830101 1121830106 专业:飞行器环境与生命保障工程课题一双轴驱动机构转角到天线波束空间指向课题意义:随着科学技术的迅猛发展,特别是航天科技成果不断向军事、商业领域的转化,航天科技得到了极大的发展,航天器机构朝着高精度、高可靠性的方向发展。
因此对航天机构的可靠性、精度、寿命等要求越来越高,对航天器机构精度的要求显得愈发突出,无论是航天器自身的工作,还是航天器在轨服务都对其精度有着严格的要求。
航天器中的外伸指向机构通常指的是星载天线机构,星载天线是航天器对地通信的主要设备,肩负着对地通信的主要任务,同时随着卫星导航的广泛应用,星载天线就愈发的重要起来,而其指向精度的要求就愈发的突出,指向精度不足,将会导致通信信号质量下降,卫星导航精度下降等结果。
民用方面移动通信和车载导航等,军用方面舰船导航、精确打击等这些都对星载天线的指向精度有着极高的依赖性。
因此,星载天线的指向精度是非常重要的。
要保证星载天线的指向精度,首先就是要确保星载天线驱动机构在地指向精度分析的正确性,只有这样才能对接下来的在轨指向精度分析和指向误差补偿进行分析。
星载天线驱动机构的末端位姿误差主要来源于机构的结构参数误差和热变形误差,这些误差是驱动机构指向误差最原始的根源,由于受实际生产加工装配能力和空间环境的限制,这些引起末端指向误差的零部件结构参数误差是必须进行合理控制的,引起结构参数变化的热影响因素是必须加以考虑的,只有这样才能使在轨天线驱动机构指向精度动态分析和误差补偿都得到较理想的结果。
纵观整个星载天线驱动机构末端位姿误差的分析,提出源于结构参数误差和热变形误差引起的星载天线驱动机构末端位姿误差的研究是必要的。
发展现状:星载天线最初大多是以固定形式与卫星本体相连的,仅仅通过增大天线波束宽度和覆盖面积来提高其工作范围,对其精度要求不是很高,但是随着航天科技的不断发展和市场需求的不断变化,这就要求,星载天线要具备一定的自由度,因此促使了星载天线双轴驱动机构的发展。
有关罗盘也叫指北针或指南针!目前基站上用的较多的有以下几种型号和厂家的:一种哈尔滨出厂的地质罗盘、一种浙江出的地质罗盘、还有一种就是地摊上用的所谓“军用罗盘”。
一般来讲,地质罗盘的准确度较绿色的“军用罗盘”准确度要很高。
以下是针对地质罗盘的使用及测试方法:
测试方位角的方法无怪呼看黑针、看白针,这主要取决于你手持罗盘的方式及所处位置是在天线前方还是后方。
当你置身于塔下(必须身处被测小区天线正下方),面对天线时。
此时有镜子的一面冲着铁塔,你也面对铁塔。
此时如果能在镜子中看到天线,天线的地面水平线应该和镜子的中线承垂直交叉。
此时你应读取的是白针所指的方位刻度。
相反如果你手持罗盘的时有镜子的一侧对着你,此时被测小区天线仍然要被套入镜子中,其底面水平线与镜子中线承垂直交叉,此时你要读取的是黑针刻度。
通俗点说就是镜子一侧对着你自己怀里的时候,有刻度一侧指向天线覆盖正前方,但是必须要将天线套入反射镜,使其底面水平线与反射镜垂直线承垂直交叉。
此时看的是白针,反之则看黑针。
测试天线俯仰角的时候,带反射镜的一侧必须朝上,带刻度一侧必须指向地面。
此时持罗盘手的手指缓慢拨动罗盘后边的调整水平的铁片,要注意观看的是罗盘内的水平尺,此时尽量将水平尺气泡置中线,读
取水平尺所指刻度即为天线的俯仰角。
(注意事项:测试俯仰角时必须先测试抱杆的垂直度,以便保证测试精确度,带刻度一侧必须指向地面方向,反之俯仰角误差在2~3度。
)
方位角测试时罗盘应保持水平状态,避免离铁塔过近或距离手机过近。
手机磁场会象磁铁一样,导致指针失效。
卫星天线⽅位⾓、仰⾓和极化⾓1、⽅位⾓:通常我们通过计算软件或在资料中得到的结果应该是以正南⽅向为标准,将卫星天线的指向偏东或偏西调整⼀个⾓度,该⾓度即是所谓的⽅位⾓。
⾄于到底是偏东还是偏西,取决于接收地与欲接收卫星之间的经度关系,以我们所在的北半球为例,若接收地经度⼤于欲接收卫星经度,则⽅位⾓应向南偏西转过某个⾓度;反之,则应向东转过某个⾓度。
正南⽅向⽤指南针来测定,但是由于地理南极和地磁场南极并⾮完全重合,所以选好⽅位⾓之后还得做⼀些修正才有可能接收到最强的卫星信号。
2、仰⾓:是天线轴线与⽔平⾯之间的夹⾓。
正馈天线的轴线很明确,是⾼频头所在位置与天线中⼼的连线;偏馈天线的轴线就没那么明确了,我仔细观察了偏馈天线的结构和形状,得出结论:轴线应该与⽀撑KU头的L型杆基本平⾏。
后来我照此结论去调节偏馈天线的仰⾓,结果调了两天也收不到76.5的亚太2R。
⼀直调到怀疑⾼频头是不是坏了,都准备再邮购⼀个新的⾼频头了,但是在那天下午,我突发奇想,想利⽤太阳光来检查⼀下偏馈天线的焦点位置,于是将L型杆对准太阳(调节天线位置,使得L型杆的在地⾯上的影⼦汇聚成⼀点),结果发现被天线反射的太阳光并没有会聚于⾼频头所在位置,⽽是在其上⽅⼀点的位置(⽤⼿在该位置可以接受到会聚的太阳光线,也可以据此来判定天线的聚焦性能),然后将天线仰⾓减⼩,使得光线会聚点正好在⾼频头所在位置,测量刚才两个不同位置下L型杆与⽔平⾯之间的夹⾓相差有⼗度左右。
⾄此⽅才恍然⼤悟原先为什么找不到那该死的亚太2R了:我所在地接收该星的仰⾓应为30度,那么L型杆与⽔平⾯之间的夹⾓应该调成20度左右(我是这样调节的:在L型杆上拴⼀根下挂重物的细绳,⽤量⾓器测量该线与L型杆之间的夹⾓θ,则L型杆与⽔平⾯之间的夹⾓必为90-θ,即只要调节θ,使之等于70度就可以了),⽽我将L型杆与⽔平⾯之间的夹⾓调成30度,然后作正负5度左右的调整,当然就找不到星星了!将该⾓度修正之后,在计算好的⽅位⾓附近适当调整,表明信号质量的红条⼦马上就窜了出来!那时候的感觉怎⼀个“爽”字了得!3、极化⾓:⽬前我们所能收视的卫星信号⼤多采⽤所谓的线极化⽅式传送,可以在同⼀个转发器中传送两个相互垂直且互不影响的两个信号,通常这两个⽅向为⽔平(H)和垂直(V)两个⽅向,由于位于⾚道上空的卫星经度与接收地经度⼀般并不相同,所以卫星发出的⽔平或垂直极化波到达接收地后极化⽅向会发⽣变化,所变化的⾓度即是所谓的极化⾓。
4D毫米波雷达俯仰角原理1.简介本文将介绍4D毫米波雷达的俯仰角原理。
首先会对毫米波雷达的基本原理进行简单说明,然后重点介绍俯仰角在4D毫米波雷达中的应用以及测量方法。
通过阅读本文,您将对4D毫米波雷达的俯仰角有一个清晰的理解。
2.毫米波雷达基本原理毫米波雷达是一种通过发射和接收毫米波信号来实现目标检测与测距的设备。
它工作在毫米波频段(频率通常在30G Hz到300GHz之间),具有较高的分辨率和穿透力。
毫米波雷达通过发射一个短脉冲的毫米波信号,并接收目标反射回来的信号来实现对目标的探测和测距。
3.俯仰角的概念俯仰角是指雷达天线与地面之间的夹角,即天线的仰角。
在4D毫米波雷达中,俯仰角是指雷达天线上下旋转的角度。
通过调整俯仰角,可以实现对不同高度目标的检测和跟踪。
4.俯仰角的应用4D毫米波雷达广泛应用于自动驾驶、智能交通和无人驾驶等领域。
在自动驾驶中,4D毫米波雷达可以通过调整俯仰角实现对行人、车辆和障碍物的检测和跟踪,从而实现智能避障和自动驾驶功能。
5.俯仰角的测量方法为了准确测量4D毫米波雷达的俯仰角,通常采用以下方法:-惯性导航系统:通过使用加速度计和陀螺仪等传感器,可以实时测量雷达天线的俯仰角。
-光学传感器:使用光学传感器配合计算机视觉算法,可以检测雷达天线的位置和姿态,从而计算出俯仰角。
-电子水平仪:安装在雷达天线上的电子水平仪可以直接测量雷达天线的俯仰角。
6.俯仰角的控制与调整在4D毫米波雷达系统中,通过调整俯仰角可以实现目标检测的精确性和灵活性。
通过对目标进行连续跟踪,并实时调整俯仰角,可以最大程度地优化雷达的性能。
7.结论4D毫米波雷达的俯仰角在自动驾驶、智能交通和无人驾驶等领域发挥着重要作用。
本文对俯仰角的原理进行了详细介绍,并介绍了俯仰角的应用和测量方法。
通过合理控制和调整俯仰角,可以提高4D毫米波雷达的目标检测和跟踪性能,使其在自动驾驶等领域发挥更大的作用。
以上就是关于4D毫米波雷达俯仰角原理的详细介绍。
创新实验课作业报告姓名: 王紫潇苗成国学号:1121830101 1121830106专业:飞行器环境与生命保障工程课题一双轴驱动机构转角到天线波束空间指向课题意义:随着科学技术的迅猛发展,特别是航天科技成果不断向军事、商业领域的转化,航天科技得到了极大的发展,航天器机构朝着高精度、高可靠性的方向发展。
因此对航天机构的可靠性、精度、寿命等要求越来越高,对航天器机构精度的要求显得愈发突出,无论是航天器自身的工作,还是航天器在轨服务都对其精度有着严格的要求。
航天器中的外伸指向机构通常指的是星载天线机构,星载天线是航天器对地通信的主要设备,肩负着对地通信的主要任务,同时随着卫星导航的广泛应用,星载天线就愈发的重要起来,而其指向精度的要求就愈发的突出,指向精度不足,将会导致通信信号质量下降,卫星导航精度下降等结果。
民用方面移动通信和车载导航等,军用方面舰船导航、精确打击等这些都对星载天线的指向精度有着极高的依赖性。
因此,星载天线的指向精度是非常重要的。
要保证星载天线的指向精度,首先就是要确保星载天线驱动机构在地指向精度分析的正确性,只有这样才能对接下来的在轨指向精度分析和指向误差补偿进行分析.星载天线驱动机构的末端位姿误差主要来源于机构的结构参数误差和热变形误差,这些误差是驱动机构指向误差最原始的根源,由于受实际生产加工装配能力和空间环境的限制,这些引起末端指向误差的零部件结构参数误差是必须进行合理控制的,引起结构参数变化的热影响因素是必须加以考虑的,只有这样才能使在轨天线驱动机构指向精度动态分析和误差补偿都得到较理想的结果。
纵观整个星载天线驱动机构末端位姿误差的分析,提出源于结构参数误差和热变形误差引起的星载天线驱动机构末端位姿误差的研究是必要的。
发展现状:星载天线最初大多是以固定形式与卫星本体相连的,仅仅通过增大天线波束宽度和覆盖面积来提高其工作范围,对其精度要求不是很高,但是随着航天科技的不断发展和市场需求的不断变化,这就要求,星载天线要具备一定的自由度,因此促使了星载天线双轴驱动机构的发展。
天线的覆盖范围主要取决于天线高度、下倾、天线增益、天线口功率、无线链路等因素。
一般网络规划对市区可按照:(a) 繁华商业区;(b) 宾馆、写字楼、娱乐场所集中区;(c) 经济技术开发区、住宅区;(d)工业区及文教区;等进行分类。
一般来说:(a)(b)类地区应设最大配置的定向基站,如8/8/8站型,站间距在0.6~1.6km;(c) 类地区也应设较大配置的定向基站,如6/6/6站型或4/4/4站型,基站站间距取1.6~3km;(d) 类地区一般可设小规模定向基站,如2/2/2站型,站间距为3~5km;若基站位于城市边缘或近郊区,且站间距在5km以上,可设以全向基站。
上几类地区内都按用户均匀分布要求设站。
郊县和主要公路、铁路覆盖一般可设全向或二小区基站,站间距离5km-20km左右。
覆盖的目的就是为了给客户带来更好无线业务服务,不过还需要注意几个方面:1、看覆盖环境,不同的地区采用不同下倾方式和天线挂高;2、看天线类型、参数,是否带电倾角,看天线参数以及其方向图进行评估;3、实地CQT测试,更加贴近用户的方式。
天线高度的调整天线高度直接与基站的覆盖范围有关。
一般来说,我们用仪器测得的信号覆盖范围受两方向因素影响:一是天线所发直射波所能达到的最远距离;二是到达该地点的信号强度足以为仪器所捕捉。
900MHz移动通信是近地表面视线通信,天线所发直射波所能达到的最远距离(S)直接与收发信天线的高度有关,具体关系式可简化如下:S=2R(H+h)其中:R-地球半径,约为6370km;H-基站天线的中心点高度;h-手机或测试仪表的天线高度。
由此可见,基站无线信号所能达到的最远距离(即基站的覆盖范围)是由天线高度决定的。
GSM网络在建设初期,站点较少,为了保证覆盖,基站天线一般架设得都较高。
随着近几年移动通信的迅速发展,基站站点大量增多,在市区已经达到大约500m左右为一个站。
在这种情况下,我们必须减小基站的覆盖范围,降低天线的高度,否则会严重影响我们的网络质量。
天线俯仰角计算
天线俯仰角是指天线安装时与水平面之间的夹角,是确定天线指向的重要参数。
在天线工程中,计算天线俯仰角非常重要。
下面介绍天线俯仰角的计算方法:
1. 首先确定天线安装位置的海拔高度H,以及天线指向的目标位置的海拔高度h。
2. 计算两个位置之间的水平距离D,可以使用直线距离计算方法:D=√(Δx+Δy),其中Δx、Δy分别是两点在水平方向上的直线距离。
3. 计算两个位置之间的高度差d,可以使用以下公式:d=hH。
4. 最后,天线俯仰角θ可以使用以下公式计算:θ=tan(d/D)。
需要注意的是,在实际工程中,还需要考虑地球曲率等因素对计算结果的影响,需要进行修正。
- 1 -。
天线方位角-俯仰角以及指向计算创新实验课作业报告姓名:王紫潇苗成国学号:1121830101 1121830106专业:飞行器环境与生命保障工程课题一双轴驱动机构转角到天线波束空间指向课题意义:随着科学技术的迅猛发展,特别是航天科技成果不断向军事、商业领域的转化,航天科技得到了极大的发展,航天器机构朝着高精度、高可靠性的方向发展。
因此对航天机构的可靠性、精度、寿命等要求越来越高,对航天器机构精度的要求显得愈发突出,无论是航天器自身的工作,还是航天器在轨服务都对其精度有着严格的要求。
航天器中的外伸指向机构通常指的是星载天线机构,星载天线是航天器对地通信的主要设备,肩负着对地通信的主要任务,同时随着卫星导航的广泛应用,星载天线就愈发的重要起来,而其指向精度的要求就愈发的突出,指向精度不足,将会导致通信信号质量下降,卫星导航精度下降等结果。
民用方面移动通信和车载导航等,军用方面舰船导航、精确打击等这些都对星载天线的指向精度有着极高的依赖性。
因此,星载天线的指向精度是非常重要的。
要保证星载天线的指向精度,首先就是要确保星载天线驱动机构在地指向精度分析的正确性,只有这样才能对接下来的在轨指向精度分析和指向误差补偿进行分析。
星载天线驱动机构的末端位姿误差主要来源于机构的结构参数误差和热变形误差,这些误差是驱动机构指向误差最原始的根源,由于受实际生产加工装配能力和空间环境的限制,这些引起末端指向误差的零部件结构参数误差是必须进行合理控制的,引起结构参数变化的热影响因素是必须加以考虑的,只有这样才能使在轨天线驱动机构指向精度动态分析和误差补偿都得到较理想的结果。
纵观整个星载天线驱动机构末端位姿误差的分析,提出源于结构参数误差和热变形误差引起的星载天线驱动机构末端位姿误差的研究是必要的。
发展现状:星载天线最初大多是以固定形式与卫星本体相连的,仅仅通过增大天线波束宽度和覆盖面积来提高其工作范围,对其精度要求不是很高,但是随着航天科技的不断发展和市场需求的不断变化,这就要求,星载天线要具备一定的自由度,因此促使了星载天线双轴驱动机构的发展。
卫星天线的⽅位、仰⾓、极化⾓卫星天线的⽅位、仰⾓、极化⾓要进⾏卫星接收,关键点是卫星接收天线的定位,它包括:天线的⽅位⾓、仰⾓和馈源的极化⾓这三⼤参数。
1、⽅位⾓从地球的北极到南极的等分线称为经线(0-180度),把地球分为东⽅西⽅,偏东的经线称为东经,偏西⽅的经线称为西经。
从地球的东到西的等分线称纬线(0-90度),把地球分为南北半球,以⾚道为界(⾚道的纬度为0),北半球的纬线称北纬,南半球的纬线称南纬。
我国处于北半球的东⽅,约在东经75-1 35度,北纬18-55度之间。
所有的⼴播电视卫星都分布在地球⾚道上空35786.6公⾥的⾼空同步轨道的不同经度上,平时我们惯称多少度的卫星,这个度指的是地球的经线。
卫星在地球上的投影称为星下点,它是位于⾚道上,经度与卫星经度相同的地⽅。
如亚太6号卫星的星下点是位于⾚道上的东经134度的位置。
我们在寻星时,如果你所在的地⽅(北半球)的经度⼤于星下点的经度,那么天线的⽅位⾓必定时正南(以正南为基准)偏西,反过来,如果你所在的位置的经度⼩于星下点的经度,那么天线的⽅位⾓是正南偏东。
卫星天线的⽅位⾓计算公式是:A=arctg{tg(ψs-ψg)/sinθ}----------(1)公式(1)中的ψg是接收站经度,ψs为卫星的经度,θ为接收站的纬度。
图1是卫星的⽅位⾓⽰意图。
⽅位⾓的调整⽅法很简单,⾸先⽤指南针找到正南⽅,天线⽅向正对正南⽅,如果计算的⾓度A是负值,则天线向正南偏西转动A度,如果A是正值,则天线向正南偏东⽅向转动A度。
即可完成⽅位⾓的调整。
2、仰⾓仰⾓是接收站所在地的地平⾯⽔平线于天线中⼼线所形成的⾓度,如图2所⽰。
仰⾓的计算公式是:. -----------------⑵仰⾓的调整最好是⽤量⾓器加上⼀个垂针作成的仰⾓调整专⽤⼯具进⾏调整。
⽅位⾓和仰⾓的调整顺序是,先调整好仰⾓,在调整⽅位⾓。
3、极化⾓国内或区域卫星⼀般都是线极化,线极化分为⽔平极化(以E‖表⽰)和垂直极化(以E⊥表⽰)。
温馨小提示:本文主要介绍的是关于《精确调整天线方位角的实操指南》的文章,文章是由本店铺通过查阅资料,经过精心整理撰写而成。
文章的内容不一定符合大家的期望需求,还请各位根据自己的需求进行下载。
本文档下载后可以根据自己的实际情况进行任意改写,从而已达到各位的需求。
愿本篇《精确调整天线方位角的实操指南》能真实确切的帮助各位。
本店铺将会继续努力、改进、创新,给大家提供更加优质符合大家需求的文档。
感谢支持!(Thank you for downloading and checking it out!)《精确调整天线方位角的实操指南》一、前言在现代通信技术中,天线方位角的准确调整对于信号的稳定性和质量有着至关重要的作用。
无论是对于无线电通信、卫星通信,还是移动通信,天线的指向直接影响到传输的效率和可靠性。
因此,理解并掌握天线方位角的调整技巧,对于无线通信工程师和维护技术人员来说,都是必备的专业知识。
天线方位角调整的重要性天线方位角的调整,是指根据通信需要,精确改变天线波束的指向。
这一过程对于提高通信质量、增大覆盖范围、减少干扰和提高频率利用率等方面都有着显著影响。
例如,在无线电广播中,正确的天线方位角调整能够使得信号覆盖更加均匀,提升广播质量;在卫星通信中,方位角的微调可以确保信号的最优路径传输,降低信号衰减和延迟;在移动通信基站的建设中,通过精确的天线指向调整,可以避免或减少基站间的干扰,提高网络的整体性能。
实操指南的目的与意义本实操指南的制定,旨在为通信工程技术人员提供一套系统、实用的天线方位角调整操作指导。
通过本指南的学习,用户不仅能够了解到天线方位角调整的理论基础,更能够通过实操步骤的学习,掌握天线调整的精确方法。
此外,本指南还提供了多种情景下的实操案例,帮助读者在实际工作中遇到问题时,能够迅速找到解决方案。
本指南的内容遵循了通信技术实操的规范要求,避免理论上的抽象和脱离实际,力求使每一个实操步骤都具有可操作性和实用性。