基于BP神经网络的电动车电子差速器设计
- 格式:pdf
- 大小:361.29 KB
- 文档页数:4

基于神经网络的智能车辆控制系统设计与实现智能车辆是汽车智能化的重要创新,可以提供更精准、更安全、更舒适的驾驶体验。
在现今的科技繁荣时期,基于神经网络的智能车辆控制系统正在得到越来越多的关注。
神经网络是一种基于人工智能的模拟人类神经系统的计算模型。
通过模拟人脑神经元之间的联系,神经网络可以自动学习和适应新的数据,并不断优化自己的预测和决策能力。
将神经网络技术应用于智能车辆控制系统,可以使车辆更好地适应不同的驾驶环境、更高效地处理复杂的交通场景,提高行车的安全性和舒适性。
智能车辆控制系统通常包括以下几个重要模块:感知模块、决策模块和执行模块。
感知模块是指使用传感器技术获取车辆周围环境信息的模块,比如雷达、摄像头、激光雷达等;决策模块负责根据感知到的信息做出相应决策,比如判断车辆行驶方向、速度、避障等;执行模块则是根据决策模块的指示,控制车辆发动机、刹车、转向等动作。
在这三个模块中,神经网络技术可以被应用于感知模块和决策模块,提高车辆的感知和决策能力。
例如,通过使用深度学习技术对摄像头和激光雷达数据进行分析,识别车辆周围的障碍物、道路标志和行驶道路状况;通过使用强化学习技术,训练车辆根据不同的交通情况做出最优决策,比如避让行人、判断车辆转向方向等。
在神经网络的支持下,智能车辆可以更快、更精准地感知和响应外界情况,减少事故风险和提高行车舒适度。
当然,神经网络技术的应用也面临着一些挑战。
例如,神经网络通常需要大量的计算资源和数据,这对智能车辆的实时性和可靠性提出了更高的要求;神经网络的可解释性较低,很难通过直觉理解和可视化技术对其预测和决策过程进行解释和验证。
因此,在设计和实现基于神经网络的智能车辆控制系统时,需要充分考虑这些挑战,并通过相应的优化和改进来提高系统的性能和可靠性。
总体而言,基于神经网络的智能车辆控制系统是一个非常有前途的领域。
随着人工智能技术的不断进步,我们相信未来会有越来越多的智能车辆问世,并且它们的控制系统也将更加智能、更加高效、更加可靠。

基于新能源电动汽车的电子差速控制系统探究发布时间:2022-02-25T09:47:01.952Z 来源:《中国科技信息》2021年11月中32期作者:李华[导读] 随着全球能源危机的加剧和环境问题的出现,世界越来越关注能源和环境问题。
电动汽车在能源和环境保护方面的独特优势和竞争力已经成为世界发展的优先产业之一。
电动汽车传动系结构简单,传动系效率高,重量轻,可针对每种车轮类型独立控制,有助于改善车辆的稳定性和动态驾驶性能。
因此,新能源汽车已经成为电动汽车的重要发展方向,具有广阔的发展前景。
科大国创新能科技有限公司李华摘要:随着全球能源危机的加剧和环境问题的出现,世界越来越关注能源和环境问题。
电动汽车在能源和环境保护方面的独特优势和竞争力已经成为世界发展的优先产业之一。
电动汽车传动系结构简单,传动系效率高,重量轻,可针对每种车轮类型独立控制,有助于改善车辆的稳定性和动态驾驶性能。
因此,新能源汽车已经成为电动汽车的重要发展方向,具有广阔的发展前景。
关键词:电动汽车;电子差速;控制技术随着人们对每天消耗的石化资源的认识不断提高,人们越来越注重寻找资源保护和绿色可持续发展的途径。
在汽车领域,新能源汽车的出现极大地促进了节能环保。
但是,为了改善电动汽车的行驶性能,必须加强对车辆电控系统的研究,以保证车辆转动期间的稳定性,保证车辆驾驶的安全性。
一、新能源电动汽车电子差速控制方法1.控制车辆驱动轮的转速。
这种控制方法的目的是根据车辆转向模型的计算来跟踪目标转速,并控制车辆的转速。
在四轮低速独立驱动电动车中,Ackermann&jeantand转向模型用于实现四轮转向速度限制,PID控制被采用来成功地控制车内外轮在不同速度和转向角度的目标转速,以保证车辆转向的稳定性和安全性。
2.检查车辆驱动轮的扭矩。
由于不同内外轮毂半径,因此在转向时刻车轮的内扭矩和外扭矩存在差异。
如果车轮内部扭矩过大,将会发生打滑现象,如果外部车轮扭矩过小,则会造成打滑问题。

基于神经网络的智能车辆控制系统设计近年来,随着人工智能产业的逐步快速发展,智能汽车也逐渐成为一个备受关注的领域。
在传统的汽车技术基础上,智能汽车增加了人工智能技术,借助大数据,云计算,物联网等技术,不断提升自身智能化程度,使智能汽车在行驶,预警,安全等领域具有了更加先进的性能和功能。
在智能汽车中,控制系统起着至关重要的作用。
基于神经网络的智能车辆控制系统是目前最为流行的一种智能车辆控制系统。
其依托于神经网络这一高效的机器学习算法,可以充分利用现有数据,不断学习和优化模型,从而实现更加准确和灵活的控制。
神经网络技术神经网络技术是一种基于人脑神经元运作机理而构建的仿生技术,能够模仿神经元进行信息输入、加工和输出等复杂信息处理。
利用神经元之间的连接和施加权值的运算方式,在大数据的基础上进行训练,从而不断优化自身的预测和判别能力。
由于其具有自学习和自适应能力,可以自动学习和优化模型,因此在智能控制领域有着广泛的应用。
基于神经网络的智能车辆控制系统的设计智能车辆控制系统由许多不同的组件构成,包括硬件和软件。
其中,基于神经网络的控制器是这种系统的关键组件之一,其功能在于收集汽车传感器数据,利用预训练后的神经网络模型来预测和改进车辆控制,以实现在行驶过程中的更加准确和灵活的控制。
在设计基于神经网络的智能车辆控制器时,需要进行多个重要的步骤,包括:1.使用数据聚合技术来收集汽车的传感器数据,包括车辆当前的速度,方向盘的转向角度,车身加速度等。
这些数据可以通过传感器或者汽车自身的控制系统进行收集。
2.进行数据处理和预处理。
对于收集到的大量数据,需要进行清洗和处理等预处理步骤,以保障数据的准确性和可靠性。
3.进行训练和测试。
在完成数据预处理后,需要进行神经网络模型的训练和测试。
这一步骤的目的在于使用多个不同的算法来构建神经网络模型,并测试模型的准确性和性能。
4.优化和调整。
在对神经网络进行了测试后,需要根据模型表现的情况进行优化和调整。

基于改进BP神经网络PID的无刷直流电动机速度控制的研
究
彭韬;鱼振民
【期刊名称】《微电机》
【年(卷),期】2005(038)004
【摘要】引进模糊归一化控制策略,在线实时地调整与收敛速度密切相关的学习速率和动量系数,克服了BP网络收敛慢和容易陷入局部最小的缺点,并将改进的BP神经网络PID算法成功应用于无刷直流电动机速度控制中.仿真结果表明,改进BP神经网络PID使收敛变得更快,而且系统具有较强的鲁棒性和自适应能力.
【总页数】4页(P17-20)
【作者】彭韬;鱼振民
【作者单位】西安交通大学电气工程学院,西安,710049;西安交通大学电气工程学院,西安,710049
【正文语种】中文
【中图分类】TM361;TM381
【相关文献】
1.基于改进BP神经网络的智能车PID控制研究 [J], 丁鹏;李林升;钟成
2.基于单神经元自适应PID控制器的无刷直流电动机控制方法研究 [J], 严卫;王育才;孙希通
3.基于改进BP神经网络PID励磁控制器的研究 [J], 彭飞;王晓颜
4.基于改进BP神经网络的电加热炉炉温PID控制研究 [J], 黄浩强
5.基于改进BP神经网络PID控制器温室温湿度控制研究 [J], 李锋;樊玉和;梁辉因版权原因,仅展示原文概要,查看原文内容请购买。
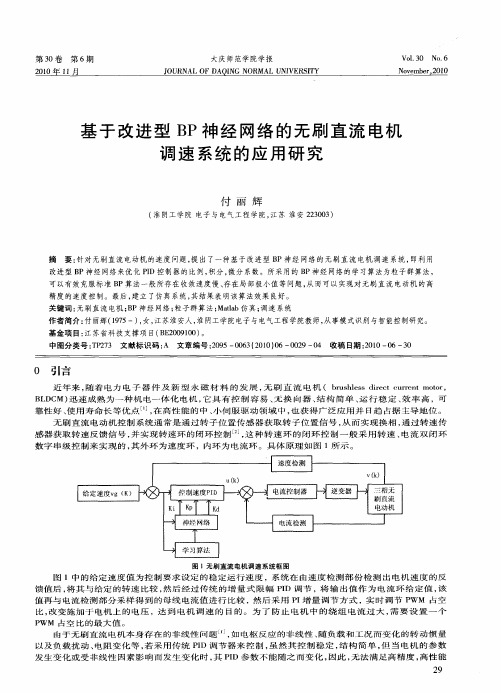
Zhuangbei Yingyong yu Yanjiu !装备应用与研究基于BP 神经网络的无刷直流电机控制系统张闯王勋黄亮程(贵州电网有限责任公司贵阳供电局,贵州贵阳550008)摘要:针对传统无刷直流电机PID 控制系统存在的非线性和强耦合问题,将神经网络与传统PID 控制器相结合,并建立3层神经网 络,通过梯度下降法对各个参数进行修正,弥补了传统PID 控制方法依赖人工经验确定参数的缺陷,实现了 PID 各个参数的在线自动调 整验结 ,神网络的PID 控制器具有度 度高和鲁棒性强等优点。
关键词:无刷直流电机;PID 控制;神经网络0引言无刷直流电机以在 ,通过电力电 器 实现, 了通直流电机通过机器实现换向存在的 缺点,[1]o传统PID 控制方法线性系统,且控制度高,无刷直流电机(BLDCM ) 电 方!!",有强耦合、等优点的非线性系统。
传统PID 控制方法高精度、高性的控制 ,控制冈 控制法成的流 ,在传统PID 控制方法的 ,引控制方法对提高系统整性 有 对的 控制器进行了 实验,以 的控制器的有性1无刷直流电机基本工作原理无刷直流电机 电机电以 动控制器 电机行过程 控制电机度,在无刷直流电机度控制中,电机通过传器 对进行 , 的 , 的, 动控制器控制电 电 电 器 的 ,以的 的, 电机 定 行三相 连接,其电压平衡方程为:!a R 00 一#a'L LmL mdd &"a'a=0R 0+%m L Lm+!c00R 一"cLmL mL"c(C式中:!0、如、!电机 相电压;e *、%、(电机 电动势;电机 相电流分别电机 的自感和定子每相之间产生的互感;"电机 电阻。
电机的电磁转矩为:*1=丄((a $a (b $b (c $)⑶电机 动方程:*1#*2=+4!dt⑷为电磁 矩(Nm );*2为负载转矩(Nm );J 为转子惯性矩(Nm );!为机 角速度(rad /s )。
基于神经网络的车辆控制系统设计与模拟随着科技的不断进步,人们对于机器自动化的需求越来越大,而车辆控制系统也逐渐成为了重要的研究课题。
基于神经网络的车辆控制系统相比传统的控制系统,具有更高的可靠性和自适应性,因此备受研究者的关注。
本文将介绍基于神经网络的车辆控制系统的设计与模拟。
一、神经网络在车辆控制系统中的应用神经网络作为一种人工智能技术,其能够模拟人脑神经元的作用,从而进行信息处理和学习。
在车辆控制系统中,神经网络能够通过学习和适应不同路况和驾驶员的行为,使车辆在不同情况下做出更好的决策。
例如,在自动驾驶车辆中,神经网络可以通过学习驾驶员的操作和车辆的传感器信息,预测前方路况和其他车辆的行驶状态,并给出相应的控制指令,使车辆能够做出更加智能的驾驶决策。
此外,神经网络还能够进行模式识别和故障诊断,识别车辆的异常状态并及时做出相应的处理。
二、基于神经网络的车辆控制系统设计基于神经网络的车辆控制系统主要由以下几个部分组成:传感器采集模块、数据预处理模块、神经网络模型和控制指令输出模块。
其中,传感器采集模块负责采集车辆行驶过程中的各种信息,如车速、转向角度、加速度等。
数据预处理模块则对采集到的信息进行处理和统计,提取出有用的特征信息。
神经网络模型则根据输入的特征信息,学习和适应不同驾驶员的驾驶特点和不同路况的变化,推导出相应的控制指令。
控制指令输出模块则将神经网络输出的控制指令转化为实际的车辆控制信号,控制车辆的运动。
在神经网络模型的设计中,需要先选择合适的神经网络结构和算法。
目前,深度神经网络(Deep Neural Network,简称DNN)已经被广泛应用于车辆控制系统中,因其具有较高的复杂度和学习能力。
在训练神经网络模型时,需要对数据进行合理的划分和归一化处理,以提高模型的准确性和泛化性能。
此外,还需要对各个网络参数进行优化调试,以获得最佳的控制效果。
三、基于神经网络的车辆控制系统模拟为了验证基于神经网络的车辆控制系统的控制性能,需要进行一定的模拟测试。
第5期2019年5月组合机床与自动化加工技术ModularMachineTool&AutomaticManufacturingTechniqueNo.5May2019文章编号:1001-2265(2019)05-0077-03㊀㊀㊀㊀DOI:10.13462/j.cnki.mmtamt.2019.05.019收稿日期:2018-11-30㊀∗基金项目:贵州省科技厅工业攻关项目(黔科合GZ字[2015]3030)作者简介:谢良松(1993 )ꎬ男ꎬ四川巴中人ꎬ贵州大学硕士研究生ꎬ研究方向为运动控制技术㊁机电一体自动化装备ꎬ(E-mail)xlsong.personal@qq.comꎻ通讯作者:冯治国(1978 )ꎬ男ꎬ贵阳人ꎬ贵州大学教授ꎬ博士ꎬ研究方向为机器人技术㊁运动控制技术㊁机电一体自动化装备ꎬ(E-mail)zgfeng@gzu.edu.cnꎮ基于神经网络算法电动助力自行车控制器设计谢良松1ꎬ赵㊀磊2ꎬ冯治国1(1.贵州大学机械工程学院ꎬ贵阳㊀550025ꎻ2.贵州凯敏博机电科技有限公司ꎬ贵阳㊀550025)摘要:针对电动助力自行车动力辅助系统调速控制精度低㊁反应迟钝等问题ꎬ建立了分析电动助力自行车动力学模型ꎬ基于神经网络算法ꎬ设计了一种基于STM单片机的电动助力车控制器ꎬ该控制方法经神经网络回归后的隶度函数由模糊控制实时调整PID三个参数ꎬ对电动助力自行车速度进行实时控制ꎮ通过骑行测试ꎬ其结果显示ꎬ该控制器控制下的电机输出对脚踏速度有很强的跟随特性ꎬ且控制器具有实时性㊁高精度㊁高稳定性等优点ꎬ提高了在复杂环境的速度控制能力ꎮ关键词:电动助力车ꎻ模糊控制ꎻSTM32单片机ꎻPIDꎻ神经网络中图分类号:TH162ꎻTG506㊀㊀㊀文献标识码:ADesignofElectricAssistBicycleControllerBasedonNeuralNetworkAlgorithmXIELiang ̄song1ꎬZHAOLei2ꎬFENGZhi ̄guo1(1.SchoolofMechanicalEngineeringꎬGuizhouUniversityꎬGuiyang550025ꎬChinaꎻ2.GuizhouKaiminboMechanical&ElectricTechnologyCo.ꎬLtd.ꎬGuiyang550025ꎬChina)Abstract:Aimingattheproblemsoflowprecisionandslowresponseofthepowerassistedbicyclepowerassistedsystemꎬananalysisofthedynamicmodeloftheelectricassistedbicyclewasestablished.BasedontheneuralnetworkalgorithmꎬanelectricbicyclecontrollerbasedonSTMsinglechipwasdesigned.AftertheneuralnetworkregressionꎬtheordinatefunctionisadjustedbythefuzzycontroltoadjustthePIDpa ̄rametersinrealtimeꎬandthespeedoftheelectricassistbicycleiscontrolledinrealtime.Throughtherid ̄ingtestꎬtheresultsshowthatthemotoroutputunderthecontrolofthecontrollerhasstrongfollow ̄upchar ̄acteristicsforthepedalingspeedꎬandthecontrollerhastheadvantagesofreal ̄timeꎬhighprecisionꎬhighstabilityꎬetc.ꎬandimprovesthecomplexenvironment.Speedcontrolcapability.Keywords:electricmopedꎻfuzzycontrolꎻSTM32singlechipꎻPIDꎻneuralnetwork0㊀引言电动助力自行车通过提供辅助ꎬ使得骑行过程轻松舒适㊁运动环保ꎬ已经广泛被都市人群㊁户外骑行及山地旅游爱好者接受ꎮ它在传统自行车的基础上ꎬ搭载的动力系统ꎬ以传感器为核心ꎬ配有轮毂电机与三元锂电池ꎮ其与传统电动车有本质区别ꎬ它不是通过转把来调节动力大小而区别于电动自行车ꎬ采用传感器去检测骑行者踩脚踏的力度ꎬ根据人力的大小进行计算判断ꎬ来理解骑行者的骑行意图ꎬ提供适当的动力辅助ꎮ国内外很多研究机构对此展开研究ꎬ如意大利费德里克二世大学[1]㊁英国不列颠哥伦比亚大学[2]㊁荷兰阿姆斯特丹自由大学[3]㊁中国哈尔滨工业大学[4]等ꎬ在电动助力自行车的传感系统㊁电机控制等方面已经取得一系列成果ꎮ但速度控制精准度㊁骑行状态反馈等仍需深入研究ꎮ本文设计以陀螺仪传感器检测路况ꎬ霍尔传感器测量速度的动力辅助系统[5]ꎬ基于神经网络算法对速度进行控制ꎬ通过实际骑行验证了此控制器具有实时性㊁高精度㊁高稳定性等优势ꎮ1㊀电动助力自行车动力学模型由于电动助力自行车受到阻力的情况普遍处于上坡过程中ꎬ如路面的摩擦阻力㊁空气动力学阻力㊁在上坡过程中克服重力做功等因此ꎬ本文主要研究助力自行车上坡骑行的模型ꎬ如图1所示ꎮ图1㊀自行车动力学M+m()dvdt=Ft-Fm-F空-F轮-Fγ(1)其中ꎬM是骑手的质量ꎬm是自行车的质量ꎬv是自行车的行驶速度ꎬFt是牵引力ꎬFm是自行车所有两轮系的机械助力ꎬF空是骑手和车在一定速度下的空气动力学阻力ꎬF轮是轮胎与地面的滚动摩擦阻力ꎬFγ是在一定坡度下重力产生的分力ꎮFt是由电机和骑行者一起提供的推力ꎮ轮系机械助力表示为:Fm=RM+m()gcosγ()(2)其中ꎬR是综合系数ꎬg是重力加速度ꎮ空气动力学阻力表示为:F空=12CρSV2(3)其中ꎬC是空气阻力系数ꎬρ是空气密度ꎬS是正面的迎风面积ꎬV是助力车与空气的相对运动速度ꎮF轮是滚动摩擦阻力:F轮=CrM+m()gcosγ()(4)其中ꎬCr是助力车轮胎的滚动系数ꎬg是重力加速度ꎬγ是路面的斜度ꎮFγ是在一定坡度下重力产生的分力:Fγ=M+m()gcosγ()(5)由此可以算出施加到后轮的总转矩为:TW=d2M+m()dvdt+Fm+F空+F轮+Fγ[](6)其中ꎬd是自行车轮的公称直径(mm)ꎮ由于轮毂电机内带有机械变速箱ꎬ所以我们引入前后轮盘的齿轮比参数ϵ和机构的传动效率δꎮε=ωpωwThεδ+Tm=d2M+m()dvdt+Fm+F空+F轮+Fγ[](7)其中ꎬTh是人人施加到转轴上的转矩ꎬTm是轮毂电机提供的转矩ꎮ2㊀助力自行车控制器及控制算法设计2.1㊀控制器硬件平台搭建电动助力自行车主要由车架㊁电池㊁控制器㊁传感器等部件构成[6]ꎬ控制器是电动助力自行车的控制核心ꎬ它负责上层的传感器的数据处理和控制下层驱动器驱动电机ꎬ所以控制器设计的好坏直接影响整车的性能ꎮ硬件实物图如图2所示ꎮ图2㊀硬件实物图核心控制器主要由STM32及外围电路组成ꎬ系统结构如图3所示ꎮ图3㊀系统结构图其中STM32F103c8t6是整个系统的主控芯片ꎬ它是基于高性能的ARMCortex ̄M3的32位RISC内核ꎬ工作频率为72MHzꎮ2.2㊀控制器算法设计经典的BP神经网络是由输入层㊁隐含层和输出层三部分组成ꎮ大致结构如图4所示ꎮ图4㊀BP神经网络本文所设计的控制算法由三个部分组成:①PID控制器ꎬ直接对电动助力车的速度进行闭环控制ꎮ②BP网络优化算法ꎬ对助力车的数据分类学习并在线调整控制函数ꎮ③模糊化控制[7]ꎮ电动助力车的目标速度与电动助力车的实际速度对比后把速度误差样本归入神经网络的样本中ꎬ然后通过三层神经网络对速度误差的样本数据进行学习分类ꎬ来在线调整权值wꎬ从而精确控制PID的3个参数ꎬ来达到对电动助力车速度的准确控制与精确响应ꎬ图5㊀速度控制部分结构原理图2.2.1㊀PID控制器部分本文使用增量式PID控制过程ꎬ其数学模型如下:P=Kpˑ(current_error﹣last_error)ꎻD=Kdˑ(current_error﹣2ˑlast_error﹢prev_er ̄ror)ꎻI=Kiˑcurrent_errorꎻPID_OUT=Pwm_value+P﹢I﹢Dꎻ式中ꎬPID_OUT是PID控制器的输出ꎬcurrent_error是当前车速误差ꎬlast_error是上一次的车速误差ꎮ2.2.2㊀BP神经网络优化算法本文采用三层神经网络来训练ꎬ输入层包含2个节点ꎬ隐含层4个节点ꎬ输出层包含3个节点ꎬ结构如图4所示ꎮ网络节点启动函数使用非负Sigmoid函数[8]ꎬ网络训练函数采用Levenberg ̄Marquardt反向传播算法(trainlm)[9]ꎬ网络学习函数使用动量梯度下降权值和阈值学习函数(learngdm)[10]ꎮ通过电动助力车实车测试得到速度误差和误差变化率ꎬ依据筛选后的经验数据进行大样本数据训练ꎬ直到能在误差允许范围内对所有输出进行模拟ꎮ训练流程图如图6所示ꎮ87 组合机床与自动化加工技术㊀第5期图6㊀训练流程图2.2.3㊀模糊化控制采用二维的模糊控制器不仅能满足实时性也能保证精度ꎬ输入量采用速度范围u(t)和速度变化率u(dut/dt)ꎮ输出量采用三输出ꎬ分别是Kp㊁Ki㊁Kdꎮ从而完成双输入三输出的模糊规则的建立ꎮ对输入输出变量归一化处理后ꎬ确定其输入基本论域:[-3m/sꎬ3m/s]㊁[-0.7m/s2ꎬ0.7/s2]ꎬ输出基本论域:[-10ꎬ10]㊁[-2ꎬ2]㊁[-20ꎬ20]ꎮ选定模糊集合论域[-20ꎬ-10ꎬ-3ꎬ-2ꎬ-0.7ꎬ0ꎬ0.7ꎬ2ꎬ3ꎬ10ꎬ20]ꎮ根据输入输出量的变化范围分为5个等级ꎬ形成一个模糊集合:[NB㊁NS㊁ZO㊁PS㊁PB]ꎬ隶属函数是经过大样本经神经网络训练后得到ꎬ逐渐得到一个最佳的隶属函数ꎬ待神经网络训练完成后的可以准确快速的找到模糊子集中的隶属ꎮ3㊀助力控制算法实验测试对设计的电动助力自行车控制器ꎬ进行了实验室模拟测试ꎬ其关键性能测试结果如下:(1)用函数信号发生器产生5V的方波分别模拟测试中轴传感器的信号和车速传感器的信号ꎬ激发控制器输出ꎬ实验数据见表1ꎮ表1㊀控制器输出实验观测值中轴转速车身角度理论的pwm观测到的pwm宽度21.2353.15%52.9%61.2371.15%71.1%42.1266.60%67.0%45.3482.70%82.6%由表1可知ꎬ测量值与理论值之间的误差在允许的范围内ꎮ(2)模拟测试之后ꎬ进行了实际骑行测试ꎬ数据处理结果如图7~图9所示ꎮ图7㊀起伏路面的运行情况图8㊀平路的运行情况图9㊀速度跟踪曲线图由图7㊁图8可知ꎬ在实际的行驶条件下ꎬ电机的输出曲线与骑行者脚踏速度曲线变化基本一致ꎬ这证明了电机的输出对骑行者的脚踏速度有很强的跟随性ꎮ并且当脚踏速度与车身角度变化时ꎬ电机输出同样做出瞬时变化ꎬ反应迅速ꎬ说明该控制器对路面情况有很强的控制器ꎬ能够起到对骑行速度有效控制的作用ꎮ如图9速度对比可知ꎬ使用神经网络PID时ꎬ速度变化平稳ꎬ波动性小ꎮ4㊀结论本文基于神经网络算法ꎬ设计了一种新型电动助力自行车控制器ꎬ把增量式PID㊁模糊控制和神经网络相结合ꎬ该控制器具有反应速度快ꎬ误差小ꎬ精度高等特点ꎮ具有较强的自适应能力ꎮ在实际骑行测试中ꎬ该控制器骑行速度控制流畅ꎬ波动性小ꎬ能在复杂路况下稳定工作ꎬ为后续电动助力自行车控制器设计方面提供了一定的参考价值ꎮ[参考文献][1]CocchiAꎬAndreiniPꎬCassittoLꎬetal.ADynamicModelforthePerformanceandEnvironmentalAnalysisofanInno ̄vativee ̄bike[J].EnergyProcediaꎬ2015ꎬ81:618-627.[2]DamTꎬPlatteelSꎬLovegroveGR.Anexperimentonriderstabilitywhilemounting:Comparingmiddle ̄agedandelderlycyclistsonpedelecsandconventionalbicycles[J].AccidentAnalysis&Preventionꎬ2017ꎬ105:109.[3]Boele ̄VosMJꎬCommandeurJJꎬTwiskDA.Effectofphysicaleffortonmentalworkloadofcyclistsinrealtrafficinrelationtoageanduseofpedelecs[J].AccidentAnalysis&Preventionꎬ2017ꎬ105(8):84-94.[4]孙岳.无力矩传感器电动助力车系统设计[D].哈尔滨:哈尔滨工业大学ꎬ2013.[5]李军伟ꎬ崔师ꎬ李连强ꎬ等.基于模糊PID的无刷直流电机控制系统设计开发[J].机械设计与制造ꎬ2013(2):77-79.[6]张夏栋.基于力矩传感器的智能电动车控制系统研究[D].苏州:苏州大学ꎬ2016.[7]王述彦ꎬ师宇ꎬ冯忠绪.基于模糊PID控制器的控制方法研究[J].机械科学与技术ꎬ2011ꎬ30(1):166-172.[8]圣飞ꎬ阴亚芳ꎬ秦晨蕊ꎬ等.基于对数运算的Sigmoid函数的研究与实现[J].微电子学与计算机ꎬ2018(2):11-14.[9]吴正江ꎬ陈如校ꎬ张霄宏.改进Adaboost下BP神经网络并行化训练方法[J].小型微型计算机系统ꎬ2018ꎬ39(5):1058-1062.[10]卢广森ꎬ黎英ꎬ毛敏.基于新阈值函数的小波阈值去噪算法[J].传感器与微系统ꎬ2017ꎬ36(10):141-144.(编辑㊀李秀敏)97 2019年5月㊀㊀谢良松ꎬ等:基于神经网络算法电动助力自行车控制器设计。