一种管道机器人结构与控制系统设计
- 格式:doc
- 大小:311.00 KB
- 文档页数:47

管道攀爬机器人结构设计及行走动力特性分析一、结构设计:1.机器人主体结构:管道攀爬机器人的主体结构一般由多个可伸缩的模块组成,每个模块包括一个电机、行走轮和一个伸缩杆。
2.伸缩机构:机器人通过伸缩杆来适应不同管道尺寸。
伸缩杆一般采用多节设计,每个节段之间通过齿轮或链条进行连接,以实现伸缩功能。
3.行走轮和传动机构:机器人采用行走轮来实现在管道内的行走。
行走轮通常由橡胶材料制成,提供良好的摩擦力。
传动机构一般为电机与行走轮的传动装置,通常采用齿轮传动或链条传动。
4.控制系统:机器人的控制系统包括传感器、执行器和控制器。
传感器可以感知机器人的位置、姿态和环境条件等信息,以便进行自主导航和任务执行。
执行器包括电机和伸缩杆等组件,用于控制机器人的运动和伸缩。
控制器负责接收传感器信息,并根据预设的算法控制机器人的运动。
二、行走动力特性分析:1.爬行速度:管道攀爬机器人的爬行速度取决于行走轮的直径、电机的转速和传动机构的设计等因素。
一般来说,机器人爬行速度应该足够快,以提高任务完成效率。
2.负载能力:机器人承载工具和传感器进行任务执行,因此需要具有较大的负载能力。
负载能力的大小与机器人的结构强度和设计参数有关。
3.自稳定性:机器人在管道内行走时需要具备较好的自稳定性,以应对管道内的复杂环境。
自稳定性主要通过控制系统实现,通过传感器检测机器人的姿态和环境条件,并及时做出调整。
4.能耗与动力供应:管道攀爬机器人通常采用电池供电,因此需要考虑能耗和续航时间。
一般通过优化结构设计和控制算法,减小阻力和能耗,延长电池寿命。
5.适应性:管道攀爬机器人需要适应多种管道的尺寸和形状。
因此,其结构设计应具有一定的自适应性,能够根据管道的不同尺寸进行伸缩和调整。
综上所述,管道攀爬机器人的结构设计和行走动力特性是保证机器人能够在管道内进行任务执行的关键要素。
通过合理的结构设计和动力调节,可以使机器人具有较高的工作效率和可靠性,适应不同尺寸和形状的管道。
管道巡检机器人的设计与实现随着工业自动化的不断发展,各行各业对于机器人的需求也越来越高。
在石油、化工等行业中,管道的巡检一直是一项重要且繁琐的工作。
传统的管道巡检方式需要人工参与,不仅费时费力,而且存在安全隐患。
因此,设计并实现一款管道巡检机器人成为了行业内的迫切需求。
一、设计理念管道巡检机器人的设计理念是结合机器人技术与无人机技术,通过对管道进行全方位的巡检,确保管道的正常运行。
机器人需要具备自主导航、障碍物避让、安全监测等功能,以应对复杂和危险的工作环境。
二、关键模块(一)自主导航模块:机器人需要通过激光雷达、视觉传感器等设备获取周围环境的信息,并通过内置的导航系统确定行进路径。
同时,机器人需要具备SLAM(Simultaneous Localization and Mapping,同时定位与地图构建)能力,以保证行进轨迹的准确性和稳定性。
(二)机械臂模块:为了能够对管道进行全方位的巡检,机器人需要搭载灵活且可伸缩的机械臂。
机械臂上配备摄像头、传感器等设备,可以对管道的细节进行检查和记录。
机械臂模块还需要具备深度学习算法,能够对检测到的异常情况进行分析和预警。
(三)传感器模块:机器人需要搭载各种传感器,如温度传感器、振动传感器、气体检测传感器等,以实时监测管道的运行状态。
这些传感器要能够准确感知管道内部的各项指标,并将数据传输给控制中心,以便对异常情况及时处理。
(四)通信模块:机器人要能够与控制中心实时进行数据交互和信息传输。
通过无线通信技术,机器人可以将巡检数据、管道状态等信息上传到云端,以供后续的数据分析和处理。
三、实现技术(一)导航定位技术:利用激光雷达、视觉传感器等设备获取机器人周围环境的信息,通过内置的导航系统进行路径规划和优化,从而实现自主导航的能力。
(二)机械臂技术:采用灵活且可伸缩的机械臂,通过精确控制机械臂的运动,实现对管道的巡检。
同时,机械臂上配备的摄像头、传感器可以获取管道内部的详细信息。
新型排水管道清淤机器人的结构设计与分析嵇鹏程;韩红波;计玉根;沈惠平【摘要】The mechanical structure and working principle of a new type of robot for deposit cleaning and checking in city drainage pipeline are introduced,the pipe-diameter adaptive mechanism of pipe cleaning robot mechanism is analyzed in dynamics,and the reamer mechanism of pipe cleaning robot is analyzed by finite element analysis.Experiments showthat the system has the characteristics of compact structure,strong adaptability,large traction force,silt thoroughly and et al.%介绍了一种用于城市排水管道清淤和检测的机器人机械结构及其工作原理,对管道清淤机器人的适径机构进行了动力学分析,对管道清淤机器人的绞刀机构进行了有限元分析。
经实验论证表明,本系统具有结构紧凑、适应性强、牵引力大、去淤彻底等特点。
【期刊名称】《江苏水利》【年(卷),期】2014(000)007【总页数】5页(P13-16,19)【关键词】清淤机器人;管径适应机构;绞刀机构;行走机构【作者】嵇鹏程;韩红波;计玉根;沈惠平【作者单位】常州市河道湖泊管理处,江苏常州213016;常州市河道湖泊管理处,江苏常州 213016;常州市水利局,江苏常州 213001;常州大学,江苏常州 213102【正文语种】中文【中图分类】TV+TP2421 总体方案1.1 清淤机器人的总体概述笔者研究的清淤机器人主要由机器人本体、管径适应机构、行走机构、绞刀机构、控制系统等组成。
管道外爬行机器人的设计与仿真管道外爬行机器人的应用场景十分广泛。
在石油、天然气等能源领域,长距离的管道运输需要定期检查,以确保无泄漏和腐蚀等问题;在城市的给排水系统中,及时发现管道的破损和堵塞对于保障居民的正常生活具有重要意义;在化工行业,管道的安全运行更是关系到生产的稳定和人员的安全。
设计一款高效的管道外爬行机器人,首先需要考虑其运动方式。
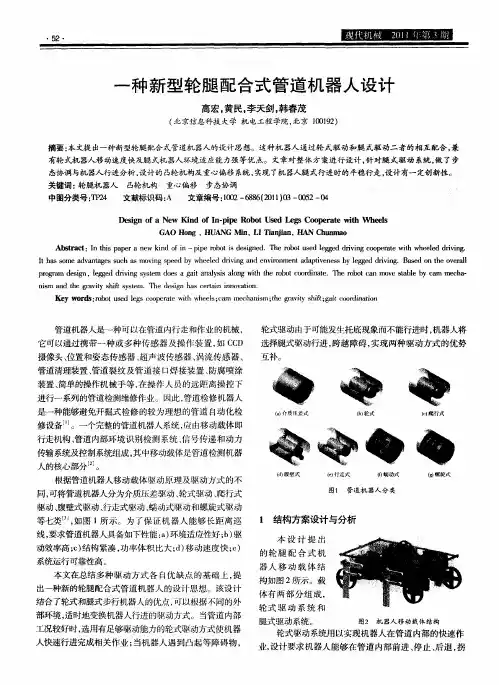
常见的运动方式包括轮式、履带式和足式。
轮式结构简单,运动速度快,但在复杂的管道表面适应性较差;履带式能够提供较好的抓地力和稳定性,但结构相对复杂,重量较大;足式机器人则具有出色的越障能力,但控制难度较高。
综合考虑各种因素,本次设计采用了轮式与履带式相结合的运动方式。
机器人的主体结构由车架、驱动装置、传动系统和控制系统等部分组成。
车架采用高强度铝合金材料,以减轻整体重量并保证足够的强度。
驱动装置选用高性能的直流电机,通过减速器将动力传递给车轮或履带。
传动系统则采用链条或齿轮传动,确保动力的有效传输。
为了使机器人能够在管道外表面稳定爬行,需要设计合适的吸附装置。
常见的吸附方式有磁吸、真空吸附和机械夹持。
磁吸方式适用于铁质管道,但对于非金属管道则无能为力;真空吸附需要保持良好的密封,在管道表面不平整时效果不佳;机械夹持则可以适应各种管道表面,但结构复杂,操作难度大。
经过分析,本次设计采用了真空吸附与磁吸相结合的方式,以提高机器人在不同管道上的适应性。
在控制系统方面,采用了基于微控制器的嵌入式系统。
通过传感器实时采集机器人的位置、速度、姿态等信息,并根据预设的控制算法进行调整。
传感器包括位移传感器、压力传感器、陀螺仪等,以确保机器人能够准确感知周围环境和自身状态。
完成机器人的设计后,接下来进行仿真分析。
仿真软件可以帮助我们在实际制造之前,对机器人的性能进行评估和优化。
首先,建立机器人的三维模型,并导入仿真软件中。
设置好管道的形状、材质和表面粗糙度等参数,以及机器人的运动参数和负载条件。
摘要管道运输在我国运用比较普遍,管道长期处于压力大的恶劣环境中,受到水、油混合物、硫化氢等有害气体的腐蚀。
这些管道受蚀后,管壁变薄,容易产生裂缝,造成漏油的问题,存在重大安全生产隐患和济济损失。
因此研究工程应用中的管道机器人具有很高的实用价值和学术价值。
根据这些问题,我们设计一种新的行走机构并分析了其总体机械结构。
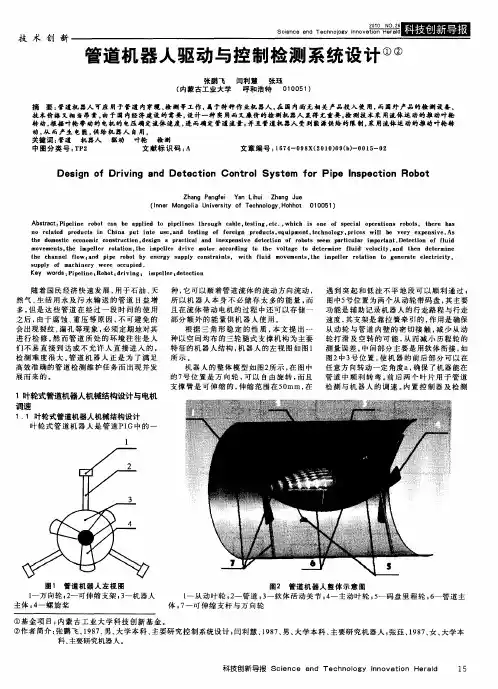
本文进一步介绍了当前国内外的管道机器人的发展现状并提出了一种新的管内行走机构。
它利用一个电机同时驱动均布在机架上并与管内壁用弹簧力相封闭的六个行进轮,从而实现了可以轴向直进全驱动的管内行走。
接着本论文重点对直进轮式管道机器人的运动机理和运动特征进行了分析和介绍。
根据管道机器人的设计要求选择电机,介绍了电机选择过程,对其中关键的机械部件如蜗轮蜗杆传动部件、齿轮等进行了设计。
该机器人具有较大的承载能力,可以在较高的速度下实现连续移动,由于该机构采用弹性装置支撑,所以该机构的管径适应性增大,是一种具有实用价值的移动机构形式。
关键词:管道机器人;行走机构;弹性装置AbstractIn our country, pipeline transportation is very universal, and pipeline is in high pressure circumstance. Because pipes are corroded by the water, the oil mixture, the hydrogen sulfide, the noxious gas corrosion and so on. When these pipelines were corroded, their walls would become thin and result in cracks and oil leak, there is safety incipient fault in production and economic loss. So the key technology and further research development trend of in-pipe robot are discussed.According to these problems, we designed a new mobile mechanism and analyzed its machine structure. In this paper, the current states of in-pipe robot are described and a new type of mobile robot mechanism moving in pipe is presented. It uses two motor to drive six wheels which distribute symmetrically on the robot body and a wheels are pushed on the wall of pipe by spring force,so that the six driving wheels move along the axis of pipe. This kind of mobile robot mechanism has high efficiency,simple structure and easy to manufacture and to mount.Then the papers focus on direct pipeline into the wheeled robot's movement and the movement of an analysis and presentation. According to the pipeline robot design requirements choose Motors, introduced the motor selection process, of which the key mechanical components such as worm transmission parts, such as a gear design. The robot with the larger carrying capacity, can achieve higher speeds for mobile, as the agencies adopt a flexible device support, the agency increased the diameter of adaptability, is a kind of practical value in the form of body movement.Keywords: In-pipe Robot; Mobile mechanism; Flexible device目录摘要 (I)Abstract ........................................................................................ I I 1绪论 (IV)1.1本课题的研究目的和意义................................ 错误!未定义书签。
自动化管道清洗机器人的设计及控制随着社会发展和工业生产的不断推进,生产过程中的管道清洗已成为大型企业、工厂常见的问题。
为了高效清洗管道,人们研发了自动化管道清洗机器人。
本文旨在介绍自动化管道清洗机器人的设计及控制。
一、机器人设计方案1. 结构设计自动化管道清洗机器人主要由机械及控制系统两部分组成。
机械系统包括机器人身体、运动轮、管道探头、清洗喷头等组件,保证机器人能够顺利在管道中行走,完成清洗工作。
控制系统则由微处理器、驱动器、传感器等组件构成。
2. 原理设计自动化管道清洗机器人的工作原理是采用压缩空气作为动力源,通过微处理器控制组件的运动控制,从而实现对机器人的移动和清洗工作。
利用该工作原理可以达到自动控制管道清洗的目的。
二、控制系统设计1. 微处理器微处理器是整个控制系统的核心。
其控制机器人的运动轨迹,在管道中实现自主巡航,完成清洗任务。
同时,微处理器也可根据不同的管道情况进行自适应控制,能处理管道的各种紧急情况。
2. 传感器传感器是检测机器人与管道间距离、机器人清洗的区域等信息的重要组件,为机器人提供最新的环境信息。
这些信息将被传输到微处理器中,微处理器根据这些信息对机器人的控制进行优化。
3. 无线控制同时,由于自动化管道清洗机器人多数作业场所十分狭小复杂,传统的有线控制方式无法运用。
基于这种情况,利用无线通信技术设计出适合机器人运作的无线控制模块,确保了管道清洗的稳定高效。
三、机器人的使用及维护使用机器人前,需要进行机器人故障的排查,检查清洗器材,确保机器人的安全运行。
在机器人运行过程中,需定期检查机器人的各项设备,如轮子、清洗喷头等。
如有发现故障,请立即采取措施避免损坏机器人。
以上是自动化管道清洗机器人的设计及控制相关内容,通过机械、控制系统和传感器等组件的运作协调,实现了对管道的自动化清洗。
相信随着科技的不断发展,自动化管道清洗机器人的表现也会更加出色。
第21期2022年11月无线互联科技Wireless Internet TechnologyNo.21November,2022基金项目:国家级大学生创新创业训练计划项目资助;项目编号:202110859018㊂作者简介:蒲小虎(1998 ),男,四川南充人,本科生;研究方向:嵌入式系统设计㊂水下管道巡检机器人控制系统设计蒲小虎,杜㊀青,王小东(天津天狮学院信息科学与工程学院,天津㊀301700)摘㊀要:为贯彻国家海洋强国战略,直面产业应用中管道资源输送中遇到的实际问题,文章通过树莓派Python 编程技术,结合视觉检测㊁水深检测㊁数据分析等功能,设计了一款水下管道巡检机器人控制系统,以达到水下管道智能检测的目的㊂该系统不仅可降低水下管道检测对人的危险性,同时可大幅度提升水下管道检测的工作效率㊂该系统由树莓派㊁视觉模块㊁深度传感器㊁电机驱动㊁报警电路㊁VNC 显示界面组成,可实现水下管道巡检㊁附着物报警及水下环境信息检测等功能㊂关键词:水下管道巡检;控制系统;树莓派;机器视觉0㊀引言㊀㊀水下机器人作为一种高技术手段,在海洋开发和利用领域的重要性日渐上升㊂随着产业的发展,各行各业迫切需要大量适用于水下作业的各式各样的水下机器人[1]㊂本设计以水下管道智能检测的现实场景和未来发展为主题,利用智能技术自主设计一台按照给定任务完成水下管道检测的机器人㊂该机器人能够沿着水下管道运动,检测管道上的吸附物,并发出警报㊂任务执行过程中可以不使用包括遥控在内的任何人工交互的手段控制水中机器人及辅助装置㊂1㊀方案设计㊀㊀本系统可分为上位机和下位机两部分,上位机通过VNC 远程登录界面可以进行程序调试㊁修改阈值参数,还可以进行图像和信息数据的实时监测㊂下位机以树莓派为主体连接各个传感器,通过图像识别技术实现系统功能,下位机主要包括树莓派4B㊁视觉模块㊁深度传感器㊁电机驱动模块㊁潜水电机㊁报警模块和电源电路等,系统框如图1所示㊂图1㊀系统框㊀㊀具体实现的功能如下㊂(1)管道循迹:利用树莓派获取内窥镜采集的图像进行数据处理,并将处理过的图像数据通过远程界面窗口显示出图像,对其进行记录;在程序上设置电机前进㊁左转㊁右转和停止的阈值条件,通过设置的颜色阈值来识别管道,满足机器人对不同的颜色管道的识别,可以适应多种场景和不同的环境㊂(2)对水下场景的拍摄:在进行管道巡检中,VNC 界面会实时显示画面,可以使用内窥镜对图像进行拍照,保存在树莓派内部文件里,可用于分析后期水下场景数据㊂(3)附着物识别报警:在进行管道巡检中,可以对管道上的附着物进行形状识别,并发出报警㊂(4)可以采集水下深度信息㊂2㊀系统硬件设计2.1㊀树莓派最小系统㊀㊀本设计主控单元采用树莓派,树莓派是一款基于ARM 的微型电脑主板,其大小仅比信用卡稍大点㊂其以SD /MicroSD 卡为内存硬盘,卡片主板周围有1个10/100以太网接口和4个USB 接口,可连接鼠标㊁键盘㊁网线,拥有HDMI 高清视频输出接口和模拟信号的电视输出接口,以上部件全部整合在1张主板上,具备PC 的所有基本功能㊂拥有40个GPIO 引脚,可以连接多个模块,并且有着强大的可扩张性,可以添加拓展板来增加连接模块的数量㊂设计中只需接通内窥镜和外围设备,就能执行实时视频播放等诸多功能㊂2.2㊀视觉模块电路设计㊀㊀本设计中的电子内窥镜是TYPE-C&Android&PC三合一的,用USB 接口跟树莓派连接便可使用,不用安装驱动[2]㊂电压为5V,分辨率有1080ˑ720和640ˑ480两种,频率在30fps,支持多个系统,在本次设计中用来采集图像和拍照(JPEG格式)㊂2.3㊀L298N电机驱动电路设计㊀㊀L298N是一种具有大电流㊁高电压的电机驱动芯片㊂该芯片采用15脚封装㊂主要特点是:输出电流大,瞬间峰值电流可达3A,持续工作电流为2A;额定功率可达25W;工作电压高,最高工作电压可达46V㊂L298N内部含有两个H桥的高电压大电流全桥式驱动器,可以用来驱动直流电动机和步进电动机㊁继电器线圈等感性负载;L298N是使用逻辑电平信号控制;可以外接检测电阻,将变化量反馈给控制电路㊂使用L298N芯片驱动电机,该芯片可以驱动一台两相步进电机或四相步进电机,也可以驱动两台直流电机㊂本次根据设计要求,需要控制两台直流电机㊂2.4㊀报警电路设计㊀㊀使用蜂鸣器加LED灯组合成一个声光报警电路,所用蜂鸣器是一体化结构的电子讯响器,采用直流电压供电㊂这里使用的是高电平,给予它一个高(HIGH)信号就会发出警报,此时再给它一个低(LOW)信号报警就会停止,在设计中用来报警㊂在报警的时候,LED 灯也会一并闪烁,进行报警提醒㊂2.5㊀深度传感器电路设计㊀㊀水深传感器采用TE公司的MS5837压力传感器, MS5837压力传感器是高精度水深测量的理想选择,水深测量分辨率高达2mm㊂MS5837是新一代的高分辨率I2C接口压力传感器㊂MS5837压力传感器模块包括高线性度的压力传感元件和超低功耗的24位әADC内置工厂校准系数㊂MS5837-30BA压力传感器可以提供高精度的24位压力和温度数字输出,使用者可以根据实际应用需要配置功耗和转换的速度㊂该型号传感器的通信协议简单,不需要修改内部的寄存器,可以与所有形式的微控器配合使用㊂2.6㊀LM2596S降压模块的电路设计㊀㊀LM2596S降压模块是由德州仪器(TI)研发生产的一款降压模块,可以产生3A电流输出降压,本质上是一种非同步降压型电源管理单片集成电路的开关电压调节器㊂模块内含150kHz固定频率振荡器和1.23V 基准稳压器㊂LM2596S具有功能完善的电流限制㊁热关断电路㊁保护电路等㊂该降压模块只需要非常少的外围器件就可以构成高效稳定的稳压电路[3]㊂还可以提供3.3V,5V,12V等多种电压选择,本次设计选择5V电压作为需求㊂2.7㊀水下电机㊀㊀水下推进器是一款全防水的水下推进器,电机的转子做了全面防水措施,可以完全浸泡在水下工作,如果需要在海水环境下工作,须在工作完毕后用淡水冲洗电机㊂如果不冲洗电机,电机内部的海水干燥后会形成结晶,影响推进器的寿命㊂3 软件设计㊀㊀本设计是在树莓派内部进行程序编写,首先用SD 卡配置镜像,获取树莓派的IP地址并使用VNC登录,配置好之后在其内部进行程序的编写和调试㊂在本次设计中使用的是Python语言,在进行编程时要清楚树莓派GPIO口的定义如何使用和格式㊂3.1㊀主程序设计㊀㊀主程序的运行过程:打开电源开关,系统正常供电,开始初始化,使用内窥镜获取图像,树莓派对获取的图像进行处理,开始检测白色的水下管道,根据管道的点位不同给电机使能信号,让电机开始运作,根据图像上白色区域的阈值进行前进㊁左转㊁右转㊂在循迹过程中,内窥镜会识别管道上是否有异物,并对其进行形状识别㊂如果是圆形,LED灯(红)闪烁,蜂鸣器报警;如果是方形,LED灯(绿)闪烁,蜂鸣器报警㊂主程序流程如图2所示㊂图2㊀主程序流程3.2㊀管道识别算法设计㊀㊀管道识别需要对内窥镜的实时图像进行灰度处理,显示出灰度图像,然后进行二值化处理㊂本设计的测试使用白色管道来进行检测,在程序中单独调用一个二值化图像的窗口用来识别管道,设定一个阈值,高于这个阈值为白色,低于阈值为黑色,进行划线得到白色管道路径㊂3.3㊀方向控制算法设计㊀㊀要控制机器人的前进,左转和右转,需要对当前二值化图像进行处理,求出白色管道的平均点位,再和船在管道正上方的位置时的白色管道的点位(320)进行比较,因为每帧图像的大小是640ˑ320,当船体(管道检测机器人)在巡检管道正上方时,所拍摄的图像中,白色管道在图像的中心位置,测试管道点位为320左右㊂当所获得的图像点位偏离320时,即可判断船体的形式方向㊂3.4㊀形状识别算法设计㊀㊀形状识别流程是首先对于获取的图像进行腐蚀和膨胀处理,通过卷积核设置阈值来消除噪点,然后将膨胀和腐蚀过后的图像分别显示出来㊂有了腐蚀和膨胀图像结果后,就可以在原图上绘制轮廓线,通过绘制轮廓线可以获取形状面积,这个时候对于轮廓线的数量进行一个判定,轮廓线大于13条说明没有检测到附着物,反之则有㊂轮廓线小于13条在连续5次以上附着物为圆形,反之附着物为方形㊂4㊀结语㊀㊀综上所述,本文所设计的系统能够识别水下白色管道并且能够根据情况直行㊁左转和右转,能够发现附着物并判断其形状,能在浅水区进行有效识别㊂水下机器人的应用在很大程度上可以降低人工巡检的难度,提高工作效率㊂随着社会的进步,水下巡检机器人在未来会有非常广泛的应用㊂[参考文献][1]孙玉山,冉祥瑞,张国成,等.智能水下机器人路径规划研究现状与展望[J].哈尔滨工程大学学报,2020(8):1111-1116.[2]李雪,杨大勇,刘家毅,等.水下石油管道巡查机器人控制系统的设计[J].测控技术,2019(8):15-20.[3]李泽科,陈越超.水中管道智能巡检机器人设计[J].电子产品世界,2022(1):86-88.(编辑㊀王永超) Design of underwater pipeline inspection robot control systemPu Xiaohu,Du Qing,Wang Xiaodong(School of Information Science and Engineering,Tianjin Tianshi College,Tianjin301700,China) Abstract:To implement the national marine power strategy,face the practical problems encountered in pipeline resource transportation industry application,this paper through the raspberry pie python programming technology, combined with visual detection,water depth detection,data analysis,designed a underwater pipeline inspection robot control system,in order to realize the purpose of underwater pipeline intelligent detection.The system can not only reduce the risk of underwater pipeline detection to people,and can greatly improve the efficiency of underwater pipeline detection.The system is composed of raspberry pie,visual module,depth sensor,motor drive,alarm circuit and VNC display interface,which can realize underwater pipeline inspection,attachment alarm and underwater environmental information detection.Key words:underwater pipeline inspection;control system;raspberry pie;machine vision。
83电子技术Electronic Technology电子技术与软件工程Electronic Technology & Software Engineering1 引言在管道清洁工作中,复杂的管道形状对管道内壁的污垢清洁造成了极大地困难。
本文依据其复杂环境的需求,设计了以STM32单片机为核心、多个传感器和模块融合的蛇形机器人控制系统,实现了机器人远程控制以及对管道内环境信息采集和处理等功能[1]。
2 控制系统2.1 控制系统总体结构为了满足油污管道环境清洁机器人的控制需求,设计了管道蛇形清洁机器人,如图1所示,控制系统上层部分是监控系统,通过Gprs 无线模块将控制指令发送给主控系统,如游动、拐弯、清洁等。
主控系统检测到的视频信号和超声震荡强度波形信号分别通过2.4G 的无线收发模块和Gprs 模块传输给监控系统显示。
主控模块通过Gprs 模块无线遥控从动系统完成机器人的移动、清洁等功能。
2.1.1 主控系统主控系统主要由STM32单片机、Gprs 无线通信模块、高频超声波清洁模块以及传感器组成。
主控系统通过Gprs 无线模块控制涡轮电机工作推动机器人在管道内游走,当机器人头部的摄像头检测到管道内部油污后,主控模块控制超声波发生器和振子黑片启动完成清洁工作[2]。
压电传感器检测超声波清洗装置的声波强度。
各模块与主控板的连接图如图2所示。
2.1.2 从控系统从控系统使用高速ARM 处理芯片,可同时控制多路PWM 舵机运动。
从控系统通过Gprs 无线模块从接收到主控系统的信号指令后,通过PWM 信号控制蛇形机器人各个关节机构的运动。
2.2 步态控制本文采用Serpenoid 蛇形曲线来规划蛇形机器人的步态运动轨迹。
蛇形机器人采用单关节自由度设计,关节与关节之间由一个舵机控制单方向摆动和一个伺服电机控制其转动。
根据机器人游走时的Serpenoid 曲线,确定其波形推进函数。
Serpenoid 曲线的曲率方程为:(1)式中,K n 为曲线传播过程中“S ”波形的数量;α0为清洁机器人的初始弯角;L 为清洁机器人的总长;S 为蛇形机器人沿Serpenoid 曲线方向上的位移大小。
摘要在石油管道中存在管道环焊缝不能处理的情况,严重影响了管道的寿命。
单节管道的腐蚀直接影响整个管道的运输。
因此,管道机器人在管道焊缝处理方面有很好的前景。
在轮式机器人的基础上,设计开发了一种新的管内移动机器人行走机构.机器人的3组驱动轮沿圆周方向成120°均匀分布,3个驱动电动机通过齿轮副直接驱动3组驱动轮,调节电动机通过新型的丝杠螺母副和压力传感器使3组驱动轮始终以稳定的正压力紧贴在管道内壁,使机器人具有充裕并且稳定的牵引力.对各个零件都做了详细的分析设计。
使该机器人机构紧凑,工作可靠,适用于管径为 400~600 mm 的管道。
使管道机器人的牵引力达到1470N。
移动速度达到83.33m/min。
满足了管道机器人的牵引力及速度的要求。
关键词:石油管道;行走设计;适应管径;驱动原理AbstractExisting in the pipeline oil pipeline of possible girth weld can't handle, and this seriously influences the pipe life single quarter pipe directly affected the whole pipeline Transportation, therefore, the transportation in pipe welds processing pipeline robot has a good prospect.This paper introduces the design of a carry pipe welds processing device for oil pipeline adapt to the diameter of in-pipe robot400~600mm walk to a new design of the device the diameter of screw nut pair way to make adjustment to the pipeline robot to 1470N traction movement speed 83.33 m/min satisfy the pipe robots traction and speed requirements.This paper introduces the oil pipeline robot structure and working principle. Puts forward new screw nut pair diameter of institutions, to use is to screw rotation nut mobile way. Design the abrasion resistance calculation, screw strength calculation and screw stability calculation. And designed a gear parts design related. Analyses the stress of the stem. Designed with gear drive way directly, first according to gear surface contact fatigue strength design and calculation, and then checked for fatigue broken teeth tooth root bending fatigue strength. In this process also involves gear axle design and axle, gears connect the design of the key and motor choice.KeyWords:Oil pipeline; Walk design; Adapt diameter; Driving principle目录摘要 ............................................................................................................................ I Abstract ......................................................................................................................... II 1 绪论 (1)1.1管道机器人概述 (1)1.2 管道机器人的发展现状 (1)1.2.1管道机器人的国外发展现状 (1)1.2.2管道机器人的国内发展现状 (2)1.3研究的主要内容 (2)1.4设计要达到的要求 (2)2 现有工作装置的行走原理 (3)2.1 实现管内行走的基本条件 (3)2.2不同移动方案的分析与比较 (3)2.2.1履带驱动 (3)2.2.2直进轮式微型管道机器人的移动机构 (4)2.2.3蠕动驱动管道机器人 (5)2.2.4螺旋推进管道机器人 (6)2.2.5足式管道机器人 (6)2.3移动方案的确定 (7)3 管道机器人适应管径的原理 (8)3.1适应管径变化的三种调节机构 (8)3.1.1蜗轮蜗杆调节方式 (8)3.1.2升降机调节方式 (9)3.1.3滚珠丝杠螺母副调节方式 (9)3.2新型的丝杠螺母调节机构 (10)4 丝杠螺母调节机构的总体设计 (12)4.1丝杠上螺母与驱动轮压力的关系 (12)4.2 BK杆上的力的计算 (13)4.3机器人弯道通过性分析 (14)4.4机器人调节机构的杆长分析 (15)4.5调节机构的杆长及参数的计算 (16)4.6正压力N的计算 (18)4.6.1机器人重量 (18)4.6.2机器人速度与加速度 (18)4.6.3机器人的驱动轮与管道内壁正压力的计算 (18)4.7计算丝杠上的力 (18)5 丝杠设计 (19)5.1 螺旋传动 (19)5.2螺旋传动的特点 (19)5.3螺杆的设计 (19)5.3.1 螺距p的确定 (20)5.3.2 螺杆公称直径d的确定 (20)5.3.3 螺杆长度的确定 (20)5.3.4螺杆的传动效率的确定 (20)5.4 螺杆的各项参数的确定 (20)5.4.1 耐磨性计算 (20)5.4.2螺纹的强度校核 (22)5.4.3螺杆的强度校核 (23)5.4.4螺杆稳定性的校核 (23)5.5丝杠上扭矩的确定 (24)6 螺旋传动的电机的选择 (25)6.1步进电机的特点 (25)6.2步进电机规格的选择 (25)6.3选择具体使用的电机 (26)7弹簧的设计 (27)7.1弹簧的设计 (27)7.1.1选择弹簧材料 (27)7.1.2计算曲度系数K (27)7.1.3计算弹簧中径D (27)27.1.4求所需弹簧的圈数n (27)7.2验算稳定性 (28)7.2.1取弹簧节距t (28)7.2.2计算弹簧的自由高度H (28)7.2.3判断弹簧稳定性 (28)7.3计算单根丝杠的长度 (28)8 驱动的原理 (29)8.1驱动电机的选择 (29)8.2移动载体方式有 (29)8.2.1单驱动管内移动载体 (29)8.2.2双驱动管内移动载体 (30)8.2.3三驱动管内移动载体 (30)8.3传动比的确定 (31)8.4小齿轮的设计及校核 (31)8.4.1选择齿轮材料及其热处理并确定初步参数 (31)8.4.2按齿面接触疲劳强度设计齿轮的主要参数 (32)8.4.3校核齿根弯曲疲劳强度 (33)9具体驱动电机的选择 (35)10 其他零件的选择 (36)10.1电机与齿轮之间的键的设计 (36)10.2电池的选择 (36)10.3丝杠与步进电机连接的联轴器的选择 (36)10.4驱动轮的选择 (37)10.5丝杠上轴承设计 (37)10.6 支撑滑动杆的导轨设计 (38)总结 (40)参考文献 (41)致谢 (43)附录A装配图 (44)1 绪论1.1管道机器人概述管道机器人是一种可沿管道内部或外部移动,携带一种或多种传感器及操作器(如CCD摄像机、位置和姿态传感器、超声传感器、涡流传感器、管道清理装置、管道裂纹及管道接口焊接装置、防腐喷涂装置、简单的操作机械手等),在操作人员的遥控操作或计算机的自动控制下,能够进行一系列管道作业的机电一体化系统。
一种管道机器人的结构设计与性能分析管道机器人是一种专门用于管道内部检测和维护的机器人。
它具有强大的适应性和灵活性,并且可以在不同形状、尺寸和材料的管道内进行操作。
在实际应用中,管道机器人能够有效地提高工作效率,减少人力资源和维修成本。
本文将探讨管道机器人的结构设计和性能分析。
一、管道机器人的结构设计1.机身结构管道机器人的机身主要由外壳、底盘和轮子组成。
外壳通常由高强度塑料或金属材料制成,具有较强的耐油、耐温和耐磨损性能。
底盘可以根据管道的不同形状适当调整,以保证机器人在管道内能够保持平衡和稳定性。
轮子的设计通常考虑到摩擦力和稳定性,使机器人能够有效地在管道内运动。
2.传动系统传动系统是管道机器人的核心组成部分之一,它由马达、传力装置、减速器和轮子等组成。
机器人的前后进和转向操作由传动系统中的电动机和减速器等组成。
同时,在机器人的设计过程中,减速器的设计需要根据机器人的重量和管道内的摩擦系数等因素来确定。
此外,传动系统必须确保机器人的稳定性和可靠性,以保证机器人在工作时能够持续高效地运动。
3.传感器系统传感器系统主要用于管道机器人的定位、检测和监控。
其中包括云台式摄像头、温度探头、湿度探头和烟雾探头等。
这些传感器能够对管道内的各项数据进行实时监测和分析,确保机器人在管道内能够准确获取所需信息。
4.电源系统电源系统主要包括电池、变压器、关联线路和充电设备等。
机器人的电源系统必须满足续航时间、充电效率和使用寿命等方面的高标准要求。
电池通常采用高效锂电池,具有较长的使用寿命和稳定性。
5.控制系统管道机器人的控制系统是机器人的灵魂,可以实现对机器人的远程操作、精准导航和实时数据监测等。
在控制系统中,主要包括单片机、编码器、传感器和通讯模块等,它们能够协调控制机器人的动态性能和定位精度等。
二、管道机器人的性能分析1.运动性能针对管道机器人在不同管道内的运动性能分析,主要包括前、后进速度和克服管道摩擦力等研究。
摘要在现代社会中,人们总要遇到各种各样的管道设施,而许多管道系统不是架设在空中就是深埋于地下,这样一来,通过人力对管道的内部进行检测就很不方便。
本文研制的移动式管道机器人本身携带CCD摄像头,可以对一定口径的管道内壁进行检测,具有较高的实用价值。
本文首先对国内外管道机器人技术的发展做了综述,给出了移动式管道机器人本体结构设计方案,详细介绍了机器人的驱动机构、云台系统等环节的结构。
所讨论的机器人采用上下位机的控制模式,使用了目前在国内较为先进的光纤信来传送控制信号和来自CCD摄像机的图像信号。
下位机以LPC2114为核心处理器,进行了移动式管道机器人行走电机的驱动控制设计、云台电机的驱动控制设计、RS232串口通信电路以及控制系统外围电路的讨论。
关键词:本体结构,控制系统,管道机器人。
AbstractIn modern society, people always encounter a variety of pipeline facilities, and many are not set up in the air piping system is buried underground, so that, through human testing within the pipeline is very inconvenient. This pipe mobile robot developed to carry CCD camera itself, you can certainly detect pipe wall diameter, has a high practical value. Firstly, the domestic and international pipeline robot technology summarized in this paper, given the structure of portable pipeline design of the robot body, detailing, the robot drive mechanism, heads and other aspects of the system structure.Robot discussed by upper and lower computer control mode, using more advanced in the domestic fiber channel to transmit control signals and image signals from the CCD camera. The next crew to LPC2114 core processor for the mobile pipeline robot drive motor for control design, the design head of the motor drive control, RS232 serial communication circuit and control system peripheral circuit discussion.Key word:Body structure,Control system, In-pipe robot.目录一、绪论 (1)二、管道机器人技术综述 (3)(一)车轮式管道机器人 (3)(二)履带式管道机器人 (5)(三)其他类型的管道机人 (5)三、移动式管道机器人的本体结构设计 (7)(一)移动式管道机器人的结构参数和特点 (7)(二)移动式管道机器人的总体结构组成 (7)(三)机器人本体结构设计 (8)1、驱动机构 (8)2、机器人本体密封及防腐 (9)(四)机器人云台系统 (9)四、移动式管道机器人控制系统硬件设计 (11)(一)管道机器人的常规控制形式 (11)(二)控制系统硬件总体设计 (12)(三)电机驱动器设计 (13)1、LPC2114简介 (13)2、电机驱动器设计 (13)3、步进电机驱动器设计 (15)(四)外围电路设计 (16)1、电源电路 (16)2、复位电路 (17)3、统时钟电路 (17)4、S232电平转换电路 (17)(五)供电及通信系统 (18)五、移动式管道机器人控制系统软件设计 (19)(一)直流电机控制的软件设计 (19)1.转速计算及显示 (19)2.电子换向的软件实现 (21)(二)四串口通信程序设计 (22)(三)上位机控制软件设计 (25)结语 (26)参考文献 (27)致谢 (28)一、绪论在现代,无论是水力、火力发电站,还是煤气、自来水、工业用水和供热系统等公共设施,以及石油、化工等工业生产系统,都有纵横交错的管道。
这些管道系统在输送各种液体和气体物质时,由于受振动、热循环、腐蚀、超负荷等作用,加上管道本身可能隐藏的内在缺陷(如裂纹、砂眼、接头处连接不良等)。
寿命总是有限的。
因此,许多管道系统难免在运行之中突然发生损坏而造成液体、气体物质的泄渗事故,不得不停工停产进行检修。
这种事故有时造成的经济损失是巨大的。
能不能在事故发生前就检查出潜在的有问题的管道而提前预防,是现代民用及工业企业中迫切需要解决的课题。
由于管道系统或者埋在地下,或者架设在高空,或者管道内径很小,用人携带仪器检查十分困难,有时甚至根本无法做到。
此外,有些危险和环境条件恶劣的工作场地。
由人去检查会对人的健康带来严重损害。
因此,有必要开发一种能够深入管道的可移动管道检测仪器代替人去完成上述工作。
在这种情况下,管道机器人作为一种先进的管道检测手段纳入了国内外机器入研究开发人员的眼中。
管道机器人属于特种机器人的研究范畴,它在管道这个特定的极限环境中作业,通常携带各种探测仪器和作业装置,在操作人员的遥控或者计算机的自动控制下完成管道的检测或者维修工作。
从上个世纪五十年代起,为了满足管道运输、自动清理以及检测的需要,美、英、法、日等国相继展开了管道机器人的研究。
最初的研究成果就是一种无主动力的管内检测设备--PIG,该设备是依靠其首尾两端管内流体形成的压差为驱动力,使之随着管内流体的流动向前运动。
随着机械、电子以及自动控制理论的快速发展,管道机器人的研究也在不断进步,人们从管道机器人的驱动结构、工作方式、控制系统等方面入手研究出许多样式的机器入。
总的说来国外我国对管道机器人的研究开始于上个世纪八十年代未期,哈尔滨工业大学、上海交通大学、广州工业大学以及上海大学等高校和科研院所都做了这方面的工作,在理论上和实用上取得了很大进步。
虽然如此,我们的管道机器人技术还远远地落后于发达国家,存在机器人负载能力差,工作时间短,检测精度不够高,检测距离短,不利于商品化等缺陷。
就排水管道而言,目前国内还没有比较先进的检测方式,大多数采用开挖的方法进行检测。
在管道机器人的发展过程中,控制系统的设计是一个十分重要的问题。
传统控制策略应用于机器人的运动控制是最普遍的,如PID控制。
只要被控对象的数学模型是比较精确的、变化不大的、近似于线性的,传统的PID控制可以满足这种情况下管道内作业机器人的控制要求。
目前,在计算机技术的发展和实际应用需求的激励下,各种新型的、先进的、智能的控制策略也应运而生,并迅速在实际系统中得到应用、改进和发展,如自适应控制、鲁棒控制、预测控制、模糊控制、专家控制、神经网络控制等。
在这些控制策略中,有的已经在机器人控制领域得到了实际应用,而有的仍处于不断丰富的研究过程中。
针对于我国管道机器人的研究状况和背景,在查阅了大量国内外文献的基础上,结合大庆市科技局的一个科技攻关项目,本文提出了一个合理的移动式管道机器人的实现方案,在机器人的本体机构、检测方式、通信和控制系统等方面都采用了当前国内先进的技术。
主要讨论了对移动式管道机器人控制系统的设计和研究,从软硬件角度介绍了移动式管道机器人的设计过程,完成了系统硬件的设计和调试,软件的编制和调试。
在机器人的研制过程中采用了改进的积分分离PID控制策略,通过样机的试验结果表明设计的合理性和有效性。
同时,对自适应模糊控制方法进行了研究,设计了无刷直流电机的自适应模糊控制器,通过仿真结果验证算法的可行性。
移动式管道机器入作为一种新型的管道检测设备,正在被越来越多的人关注和研究,它的应用前景将十分广阔。
二、管道机器人技术综述机器人技术属于自动化领域高科技范畴之一,研制机器人的主要目的之一就是要代替人在危险的或者人无法到达的环境下作业。
现代机器人技术起源于遥控主从型机械手,它是在第二次世界大战期间为了对付放射性材料而发展起来的,为此,四十年代后期美国橡树岭和阿尔贡国家实验室开始研制遥控式机械手,用于搬运放射性材料。
上个世纪五十年代,随着电子计算机的迅速发展,使得机器人的发展步伐加快,这也使人们研究能自主、重复操作的更加复杂的机器人系统成为可能。
随后,美国的Unimation公司于1962年制造了实用的机器人,并取名为Unimate。
紧接着,欧洲的第一台程序控制一号操作工业机器人于1963年由瑞典一家公司推出,这标志着机器人在工业生产中应用的时代已经到来。
进入八十年代,现代工业生产技术从大批量生产自动化时代进入多品种自动化时代,于是,工业机器人在这个时代中起着越来越重要的作用。
在上述非结构环境中作业的机器人统称为特种机器人。
现代传统的机器人及特种机器人属于两个不同的应用范畴,由于在上述环境中作业的特种机器入的研究开发的必要性显得越来越重要,许多国家把特种机器人的研究列入国家和各国的合作计划,并给予强有力的经济和技术支持,因此特种机器人的研究和开发具有重要的战略意义。
现代工农业及日常生活中使用着大量管道,石油、天然气、化工等领域也应用了大量管道,这些管道大多埋在地下或海底,输送距离近千里,它们的泄漏会造成严重的环境污染甚至于引起火灾,多数管道安装环境人们不能直接到达或人们无法直接介入,因此,质量检测、故障诊断的课题十分迫切地摆在我们面前。
管道检测技术始于上个世纪50年代[1],由于当时天然气等大口径管道的发展激励人们去研究一种管内检测设备,这就是我们通常历说的一种无动力的管内清理检测设备--PiG[2],该设备简单、实用,在一定程度上解决了天然气管道的检测问题。
到了70年代末,随着检测技术的发展,PIG技术已经成熟。
现在英、日、美、德、法等国大公司的PIG 产品已经实用化、商品化。
PIG的特点是实用性好、行走距离远,可达300公里左右,而且不拖线作业,但是PIG类检测设备无自动行走能力,移动速度及检测区均不易控制,严格说来它不能算做是机器人。