第二章摄影测量基础
- 格式:doc
- 大小:69.50 KB
- 文档页数:9
《摄影测量学》课程笔记第一章绪论一、摄影测量学的基本概念1. 定义摄影测量学是一种通过分析摄影图像来获取地球表面及其物体空间位置、形状和大小等信息的科学技术。
它结合了光学、数学、计算机科学和地理信息科学等多个领域的知识,为地图制作、资源管理、环境监测和工程建设等领域提供精确的数据。
2. 分类- 地面摄影测量:使用地面上的摄影设备进行的摄影测量,适用于小范围或精细的测量工作。
- 航空摄影测量:利用飞行器(如飞机、无人机)搭载摄影设备进行的摄影测量,适用于大范围的地形测绘。
- 卫星摄影测量:通过卫星搭载的传感器获取地球表面信息,适用于全球或大区域的环境监测和资源调查。
3. 应用领域- 地图制作:制作各种比例尺的地形图、城市规划图和专题地图。
- 土地调查:进行土地分类、土地权属界定和土地使用规划。
- 城市规划:辅助城市设计和基础设施规划。
- 环境监测:监测环境变化,如森林覆盖、水资源和污染状况。
- 灾害评估:评估自然灾害的影响范围和损失。
- 军事侦察:获取敌对地区的地理信息。
二、摄影测量学的发展历程1. 早期摄影测量(19世纪中叶-20世纪初)- 1839年,法国人达盖尔发明了银版照相法,这是摄影技术的起源。
- 1851年,瑞士工程师普雷斯特勒使用摄影方法绘制了第一张地形图。
- 1859年,法国人布洛克发明了立体测图仪,使得通过摄影图像进行三维测量成为可能。
2. 现代摄影测量(20世纪初-20世纪末)- 20世纪初,德国人奥佩尔提出了像片纠正和像片定向的理论,为摄影测量学的理论基础做出了贡献。
- 1930年代,随着航空技术的发展,航空摄影测量开始广泛应用。
- 1950年代,电子计算机的出现为摄影测量数据的处理提供了新的工具。
- 1960年代,数字摄影测量开始发展,利用计算机技术进行图像处理和分析。
3. 空间摄影测量(20世纪末-至今)- 1970年代,卫星遥感技术开始应用于摄影测量,提供了全球范围内的地理信息。
摄影测量学基础知识点一、摄影测量学的基本概念。
1. 摄影测量学定义。
- 摄影测量学是对研究的对象进行摄影,根据所获得的构像信息,从几何方面和物理方面加以分析研究,从而对所摄对象的本质提供各种资料的一门学科。
简单来说,就是利用摄影像片来测定物体的形状、大小和空间位置的学科。
2. 摄影测量的分类。
- 按距离远近分。
- 航天摄影测量:利用航天器(卫星、航天飞机等)上的摄影机对地球表面进行摄影,获取大面积的影像数据,主要用于地形测绘、资源调查、环境监测等全球性或大区域的项目。
- 航空摄影测量:通过飞机等航空飞行器上的航空摄影机对地面进行摄影,是地形测绘、城市规划等中常用的测量手段,它可以获取较高分辨率的影像,覆盖范围相对航天摄影测量小,但精度较高。
- 地面摄影测量:将摄影机安置在地面上,对目标物进行摄影测量。
常用于近景摄影测量,如建筑变形监测、文物保护中的三维建模等。
- 按用途分。
- 地形摄影测量:主要目的是测绘地形图,获取地面的地形地貌信息,包括等高线、地物位置等。
- 非地形摄影测量:用于测定物体的外形、大小和运动状态等,在工业制造(如汽车外形检测)、生物医学(如人体骨骼测量)等领域有广泛应用。
3. 摄影测量的发展历程。
- 早期的摄影测量主要基于模拟摄影测量仪器,如立体测图仪等。
通过光学机械的方法,将摄影像片进行模拟处理,实现地形测绘等功能。
- 随着计算机技术的发展,进入解析摄影测量阶段。
通过建立数学模型,利用计算机解算像片上像点的坐标,提高了测量的精度和效率。
- 现在,数字摄影测量成为主流。
它以数字影像为基础,利用计算机视觉、图像处理等技术,实现自动化、智能化的摄影测量处理,如数字高程模型(DEM)生成、正射影像图制作等。
二、摄影测量的基本原理。
1. 中心投影原理。
- 摄影测量中,摄影机的镜头相当于一个中心投影的投影中心。
地面上的点在像片上的成像过程是中心投影。
- 设地面点A,摄影中心S,像点a,在中心投影下,A点发出的光线通过镜头S 后,在像平面上成像为a点。

摄影测量学教案第一篇 摄影测量基础第一章 绪论主要内容:摄影测量学的定义,摄影测量学的分类,摄影测量要解决的基本问题,航空摄影测量的成图方法,摄影测量的成图作业工序,摄影测量的发展历程。
重点:摄影测量学的定义、分类,摄影测量要解决的基本问题,航空摄影测量测图方法,摄影测量的发展历程。
难点:学时安排:授课 ,实验 。
一、摄影测量学:是对研究的对象进行摄影,根据所获得的构像信息,从几何方面和物理方面加以分析研究,从而对所摄对象的本质提供各种资料的一门学科。
二、分类:(一)、按研究对象:⎪⎪⎪⎩⎪⎪⎪⎨⎧⎪⎪⎩⎪⎪⎨⎧交向摄影测量等倾摄影测量等偏摄影测量正直摄影测量非地形摄影测量地形摄影测量 1、地形摄影测量:研究的对象是地区表面的形态,以物体与构像之间的几何关系为基础,最终根据摄影像片测绘出摄影区域的地形图。
2、非地形摄影测量一般是指近景摄影测量,顾名思义,研究的对象在体积和面积上较小,摄影机到摄影目标的距离较近,一般小于300m ,测量的精度相应地要求较高。
基本理论也是根据物体与构像之间的几何关系,但在处理技术上有着其特殊性。
测量成果乃是表示研究对象的一系列特征点的三维坐标值,即研究对象的数字模型可绘制所摄物体的立面图、平面图和显示立体形态的等值图。
(二)、按摄影站的位置:⎪⎪⎩⎪⎪⎨⎧水中摄影测量地面摄影测量航空摄影测量航天摄影测量1、航天摄影测量 :利用航天器和人造卫星、高空飞机进行摄影。
2、航空摄影测量:指的是地形摄影测量,从航摄飞机上对地面进行摄影,目的在于测绘地形图。
3、地面摄影测量:包括地面立体摄影测量和近景摄影测量。
前者在测绘特殊地区的地形图时常采用,后者是对科学技术专题科目进行研究时采用。
4、水中摄影测量是将摄影机置于水中,对水下地表进行摄影以绘制水下地形图,这属于双介质摄影测量。
三、摄影测量要解决的基本问题:将中心投影的像片转换为正射投影的地形图。
四、航空摄影测量绘制地形图的方法:⎪⎩⎪⎨⎧全能法微分法分工法综合法)(1、综合法:是摄影测量和地面地形测量相结合的测图方法。

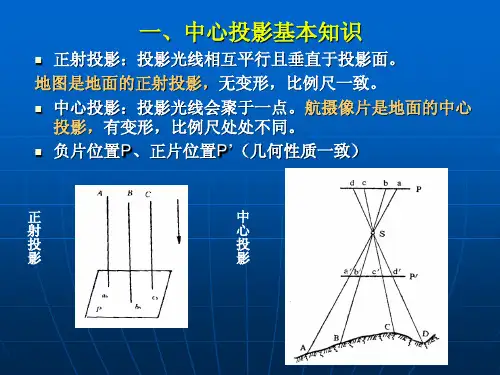
第二章摄影测量基础2.1单张航摄相片解析2.1.1航摄相片与地图的区别航摄相片是地面景物的中心投影构象,而地图则是地面景物的正射投影,这是两种不同性质的投影。
只有当地面严格水平且相片也严格水平时,上述两种结果才等效。
地图是地表面根据一定的比例按正射投影位置来描绘的,其平面位置是正确的。
当航摄像片有倾角或地面有高差时,所摄得的像片与上述理想情况会有差异。
这种差异表现为像点位移,它包括因像片倾斜引起的像点位移和因地形起伏引起的像点位移,后者又成为投影差。
航摄相片上所存在的倾斜位移与投影差决定了其不能直接作为地图使用。
2.1.2像片倾斜引起的像点位移一般情况下,航空摄影所获取的像片是倾斜的,此时,即使地面严格水平,航摄像片上的物体也会因为像片倾斜而产生变形或像点位移。
这种位移的结果是使得像片上的几何图形与地面上的几何图形产生变形,而且像片上影像比例尺处处不等。
正是由于存在这种差异,使得中心投影的航摄像片不具备正射投影的地图功能。
摄影测量中对这种因像片倾斜引起的像点位移可用像片纠正的方法予以改正。
2.1.3地面起伏引起的投影差航空摄影的对象主要是地球表面,地球表面是有起伏的,包括自然的地形起伏和由人工建筑物、植被等引起的起伏。
由于地球表面起伏所引起的像点位移称为像片上的投影差。
由于投影差的存在,使得地面目标物体在航摄相片上的构像偏离了其正确的位置。
投影差具有如下性质:(1)越靠近像片边缘,投影差越大,在像底点处没有投影差;(2)地面点的高程或目标物体的高度越大,投影差也越大;(3)在其他条件相同的条件下,摄影机的主距越大相应的投影差越小。
城区航空摄影时,为了有效减小航摄像片上投影差的影响,应选择长焦距摄影机进行摄影。
2.1.4航摄像片的内、外方位元素1.内方位元素内方位元素是描述摄影中心u像片之间相互位置关系的参数,包括三个参数,唧摄影中心到像片的垂距f(主距)及像主点在像片框标坐标系中的坐标(x0,y0)。
内方位元素一般视为已知,它可由摄影机制造厂家通过对摄影机的鉴定得到,也可由用户对通过对摄影机的校检得到。
内方位元素中的x0,yo是一个微小值。
内方位元素的正确与否,直接影响测图的精度,因此对航测机须作定期的鉴定。
2.外方位元素在恢复了内方位元素的基础上,确定摄影光束在摄影瞬间的空间位置和姿态的参数,称为外方位元素。
一张像片的外方位元素包括6个参数:三个线元素,三个角元素。
1)外方位线元素外方位三个线元素是用来描述摄影瞬间,摄影中心s在所选定的地面空间坐标系中的坐标值。
外方位线元素常用xs/、ys、zs表示。
2)外方位角元素外方位角三元素是用来描述摄影瞬间,摄影像片在所选定的地面空间坐标系中的空间姿态。
可理解为航空摄影时飞机的俯仰角,滚动角,航偏角。
外方位元素的确定需要利用地面控制信息。
2.1.5中心投影的共线方程1.共线方程表达式所谓共线方程就是指中心投影的构象方程,即在摄影城乡的过程中,摄影中心S、像点a及其对应的地面点A三点位于一条直线上,此时,摄影中心S点的物方空间坐标(Xs,Ys,Zs)、像点a的像片坐标(x,y)以及对应地面点A的物方空间坐标(XA,YA,ZA)满足式。
共线方程式是摄影测量中最基本、最重要的关系式。
2.共线方程式的主要应用:在解析和数字摄影测量中,共线方程是极其有用的。
共线方程的主要应用包括:(1)单像空间后方交会和多像空间前方交会;(2)解析空中三角测量光束法平差中的基本数学模型;(3)构成数字投影的基础;(4)利用数字高程模型(DEM)与共线方程制作正射影像;(5)利用DEM和共线方程进行单幅影像制图,等等。
2.2像点坐标的测量2.2.1像平面坐标系的定义像平面坐标系是用以描述像点在像平面上的位置。
在解析和数字摄影测量中,常根据框标来确定像平面坐标系,称为像片框标坐标系。
它以像片上对边框标的连线作为x,y轴,其交点P作为坐标原点,与航线方向相近的连线为x轴。
在像点坐标量测中,像点坐标值常用此坐标系表示。
在摄影测量解析计算中,像点的坐标应采用以像主点为原点的像平面坐标系中的坐标。
为此,当像主点与框标连线交点不重合时,须将像片框标坐标系中的坐标平移至以像主点O为原点的坐标系。
当像主点在像片框标坐标系中的坐标为x0,y0时,则量测出的像点坐标x,y换算到以像主点为原点的像平面坐标系中的坐标为x-x0,y-y0。
2.2.2像点坐标的量测当用解析的方法处理摄影测量像片时,首先要测量出像点的像片坐标(x,y)。
传统的量测像片坐标的专用仪器包括单想坐标量测仪和立体坐标量测仪等。
进入数字摄影测量的时代后,计算机的自动匹配技术和同名点的确定已成为摄影测量的一个重要内容,像点做爸爸的量测既可通过作业员在计算机屏幕上直接进行,也可通过立体影像匹配的方法进行自动量测。
2.2.3像点坐标的系统误差改正像点坐标的系统误差主要是有摄影材料的变形、摄影物镜的畸变、大气折光以及地球曲率等因素引起的,这些误差对每张像片的影响有相同的规律,是系统误差。
在进行像对的立体测图时,它们对成图的精度影响不大,然而在处理大范围的空中三角量测加密点以及高精度的解析和数字摄影测量师必须加以考虑,特别是对摄影材料的变形改正和摄影物镜畸变差的改正。
2.3立体测图的原理与方法2.3.1立体观测原理立体观测方法是摄影测量的一个重要手段。
利用相邻像片所组成的像对进行双眼观察时,可重建空间景物的立体视觉,所产生的立体视觉称人造立体视觉。
利用立体像对与一对浮动测标进行立体观测,测定左右片的同名像点,是摄影测量的重要方法,也是立体摄影测量的基础。
人造立体视觉必须符合自然界立体观察的4个条件:(1)两张像片必须是在两个不同位置对同一景物摄取的立体像对;(2)每只眼睛必须只能观察像对中的一张像片;(3)两像片上相同景物(同名像点)的连线与眼基线应大致平行;(4)两像片的比例尺应相近,否则需用ZOOM系统进行调节。
用上述方法观察到的立体与实物相似,称为正立体效应。
如果把像对的左右像片对调,左眼看有像片,右眼看左像片,或者把像对在原位旋转180°,这样产生的生理视差就改变的符号,导致观察到的景物远近效果正好与实际景物相反,这称为反立体效应。
2.3.2像对的立体观察方法这立体的观察过程中,为了保证观察着两眼分别只看一张像片,以实现人造立体视觉,经常需要借助一些辅助设备来达到分像的目的,以便实现立体观测,常用的立体观测方式有:1.立体镜观测法:最简单的立体镜是桥式立体镜。
桥式立体镜由于基线太短,不利于观察大像幅的航摄像片。
为了对大像幅航摄像片进行立体观察,可改用焦距较长的透镜,并在左右光路中各加入一对反光镜,起扩大眼基距的作用,这一类的立体镜称反光立体镜。
2.叠映影像的立体观测法叠映试立体观察方法是用光线照射透明的左右像片,并使其影像叠映在同一个承影面上,然后通过某种方式使得观察者左右眼睛分别只看一张像片的影像,从而得到立体效应。
常用的方法有红绿色互补法、光闸法、偏振光法以及液晶闪闭法。
其中液晶闪闭法是一种新型的立体观察方法,广泛应用于现代的数字摄影测量系统中。
3.双目镜观测光路的立体观测法双目镜观测光路的立体观察是用两条分开的观测光路来实现,将来自左、右像片的光线分别传送到观测者的左、右眼睛中,从而达到左右眼分别只看到一张像片的目的。
2.3.3像对的立体测图方法摄影过程中的几何反转是双像立体测图的基本原理与前提。
航测立体测图的方法有三种:模拟法立体测图、解析法立体测图和数字化立体测图。
目前在生产单位前两种方法不再采用,已基本实现了全数字化立体测图。
从广义上讲,全数字化立体测图是根据摄影测量和遥感所获得的测量数据,借助计算机进行各种数值、图形和影像的处理,从而获得各种形式的数字产品和目视化产品。
这里的数字化产品包括数字线化地图(DLG)、数字高程模型(DEM)、数字正摄影像(DOM)、数字格栅地图(DRG)、测量数据库、地理信息系统(GIS)、土地信息系统(LIS)等。
这里的可视化产品包括地形图、专题图、纵横剖面图、透视图、正摄影像图、电子地图等。
2.3.4地物与地貌的测绘通过对立体像对进行定向和建模,可重建地面按比例尺缩小的立体模型。
在模型上进行量测,可直接测绘出符合规定比例尺的地形图,获取地理基础信息。
对于数字化立体测图而言,地物和地貌的测绘可以在计算机支持下以人机交互的方式高效率的完成。
2.4摄影测量解析计算基础基于立体像对的解析摄影测量就是利用解析计算的方法处理影像信息,从而获得地面的基础空间信息。
它重点解决影像信息中的几何信息,包括建立数字地面模型。
用解析的方法处理立体像对,常用的方法有三种:(1)利用空间的前方交会和后方交会来解求地面目标的空间坐标。
(2)利用立体像对的内在几何关系,首先,通过像对定向,建立于地面相似的立体模型,计算出模型点的空间坐标。
再通过绝对定向,将模型进行平移、旋转、缩放,把模型纳入规定地面坐标系之中,解求出地面目标的绝对空间坐标。
(3)利用光束法双像解析摄影测量来整体解求摄影像片的外方位元素和地面目标的空间坐标。
这种方法实际上是前面(1)(2)种方法的综合集成方法,它是光束法解析空中三角测量的基本内容。
2.4.1单片像片的空间后方交会如果我们知道每张相片的六个外方位元素,就能恢复航摄像片与被摄地面的相互关系,重建地面的立体模型,并利用立体模型提取目标的几何和物理信息。
因此,如何获取外方位元素是摄影测量的重要任务之一。
基于共线方程的单像空间后方交会就是用来解求像片外方位元素的重要方法。
若已知一张像片的内方位元素以及像片覆盖范围内3个以上地面平高控制点的坐标,并且量测相应的像点坐标,则可根据共线方程列出相应的误差方程式,从而解求出像片的6个外方位元素,这一过程称为基于单张像片的空间后方交会。
单像空间后方交会是解析空中三角测量的基本内容。
2.4.2立体像对的空间前方交会在像片的内外方位元素已知的情况下,欲由单张像片上的像点坐标反求地面点的空间坐标是不可能的。
因为根据单个像点及其相应像片的内外方位元素只能确定地面点所在的空间方向。
但是,若由立体像对上的同名像点坐标反求地面点的空间坐标则是可能的。
因为,使用立体像对上的同名像点能得到两条同名光线在空间的方向,这两条同名光线在空间一定相交,其相交处必然是该地面点的空间位置。
因此,所谓立体像对空间交会的含义是,设在空中S1和S2相邻两个摄站点对地面进行摄影,获得一个立体像对。
任意地面点A在该像对的左右像片上的构象分别为a1和a2,在左右两张像片的内外方位元素均为已知的情况下,使用立体像对上两同名像点的左右像片坐标a1(x1,y1)、a2(x2,y2),即可根据共线方程解析计算出A点的物方空间坐标(XA,YA,ZA).这种由立体像对中两张像片的内、外方位元素和像点坐标来确定相应地面点的地面坐标的方法,称为立体像对的空间前方交会。