二值图边缘跟踪算法
- 格式:pdf
- 大小:286.57 KB
- 文档页数:6

图像边缘检测的方法图像边缘检测是在计算机视觉领域中一项重要的任务,它可以用来提取图像中物体的轮廓或边界信息。
常用的图像边缘检测方法包括基于梯度的方法、基于边缘模型的方法和基于机器学习的方法。
1. 基于梯度的方法基于梯度的方法通过计算图像中灰度的梯度来检测图像的边缘。
常用的基于梯度的方法包括Sobel算子、Prewitt算子和Canny算子。
(1)Sobel算子:Sobel算子是一种常用的边缘检测算子,它通过在图像中滑动一个3x3的卷积核来计算图像灰度的梯度。
它分别计算水平和垂直方向上的梯度,并将两个方向上的梯度相加得到最终的边缘强度。
(2)Prewitt算子:Prewitt算子与Sobel算子类似,也是通过计算图像灰度的水平和垂直方向上的梯度来检测边缘。
不同之处在于Prewitt算子使用了不同的卷积核,其效果也有所差异。
(3)Canny算子:Canny算子是一种边缘检测算法,它通过多个步骤来获得较为准确的边缘结果。
首先,它使用高斯滤波器对图像进行平滑处理,然后计算图像灰度梯度的幅值和方向。
接着,通过非极大值抑制来细化边缘。
最后,使用双阈值处理来检测和连接真正的边缘。
2. 基于边缘模型的方法基于边缘模型的方法是利用边缘在图像中的几何特征来进行检测。
常用的基于边缘模型的方法包括Hough变换和边缘跟踪算法。
(1)Hough变换:Hough变换是一种广泛应用于边缘检测的方法,它可以将图像中的边缘表示为参数空间中的曲线或直线。
通过在参数空间中寻找曲线或直线的交点,可以得到图像中的边缘。
(2)边缘跟踪算法:边缘跟踪算法是一种基于像素领域关系的边缘检测方法。
它首先选择一个起始点作为边缘点,然后根据一定的规则选择下一个与当前点相邻的点作为新的边缘点,并将其加入到边缘集合中。
通过不断跟踪边缘点,可以得到完整的边缘。
3. 基于机器学习的方法基于机器学习的方法是近年来较为流行的一种图像边缘检测方法。
它利用大量的已标注的训练数据来训练模型,然后使用训练好的模型对新的图像进行边缘检测。

内边界跟踪和外边界跟踪是图像处理中常用的算法,它们在物体识别、图像分析、目标跟踪等方面具有重要的应用价值。
本文将从算法原理、应用领域和优缺点等方面对内边界跟踪和外边界跟踪进行简要介绍,以期为读者提供全面的了解。
一、内边界跟踪算法内边界跟踪算法是一种用于提取目标内部边界的图像处理算法。
其主要原理是从目标的内部开始,沿着边缘像素依次跟踪,直至回到起点。
常用的内边界跟踪算法包括基于链码的跟踪算法和基于边缘检测的跟踪算法。
1.1 基于链码的内边界跟踪算法基于链码的内边界跟踪算法是一种以目标内部边界像素为起点,按照像素相邻关系依次跟踪的算法。
其核心思想是用一系列数字码来表示像素之间的连续关系,从而构建目标的内部边界路径。
常见的链码编码方式包括4连通链码和8连通链码,分别适用于4邻域和8邻域的像素跟踪。
链码编码具有简洁高效的特点,适用于快速提取目标内部边界。
1.2 基于边缘检测的内边界跟踪算法基于边缘检测的内边界跟踪算法是一种在边缘检测的基础上进行跟踪的算法。
其主要步骤包括对目标进行边缘检测,然后从边缘像素出发进行跟踪,最终得到目标的内部边界路径。
常用的边缘检测算法包括Sobel算子、Canny算子等,它们能够有效提取目标的边缘信息,为内边界跟踪提供了可靠的输入数据。
二、外边界跟踪算法外边界跟踪算法是一种以目标外部边界为起点,沿着边缘像素逐步跟踪的图像处理算法。
其主要原理是从目标的外部开始,按照像素相邻关系逐步跟踪,直至回到起点。
常用的外边界跟踪算法包括基于边缘填充的跟踪算法和基于边缘内外关系的跟踪算法。
2.1 基于边缘填充的外边界跟踪算法基于边缘填充的外边界跟踪算法是一种在目标外部进行像素填充,然后从填充后的边缘像素开始进行跟踪的算法。
其核心思想是通过填充操作将目标的外部边界转化为内部边界,从而利用内边界跟踪算法进行处理。
这种方法能够简化外边界跟踪的流程,提高跟踪的准确性和稳定性。
2.2 基于边缘内外关系的外边界跟踪算法基于边缘内外关系的外边界跟踪算法是一种根据目标边缘像素的内外关系进行跟踪的算法。


科技创新导报S T y I 2007N O .35Sci e nc e a nd Tec hno l o gy I nn ov at i on H e r al d科教平台科技创新导报1引言物体的边缘信息在计算机视觉中起着十分重要的作用。
传统的边缘跟踪算法有跟踪虫法[1]、基于模板的算法[2]、以及文献[3]中使用的方法等。
2二值图像边界跟踪的一般方法在二值图像中边界的灰度值和边界内部灰度值均相同。
边缘是单像素的闭合连续的。
为了求区域的连接关系,必须沿区域的边界点跟踪像素,称之边界跟踪。
二值图像边界跟踪一般方法的具体步骤如下:利用光栅扫描,如果像素值由1变为0就将当前的像素P s 的坐标(i ,j)记录下来(如图1)。
从像素(i,j+1)开始逆时针方向计算8-邻接像素,当第一次出现的像素值为1的像素(记为P1)同样记录P1的坐标。
同上,逆时针方向用已有的Pk-1去计算其8-临接像素去计算Pk 。
一旦遇到当前像素值为0,就记为Pk,同时记录Pk 的坐标。
当Pk=Ps 时,整个轮廓边缘扫描结束。
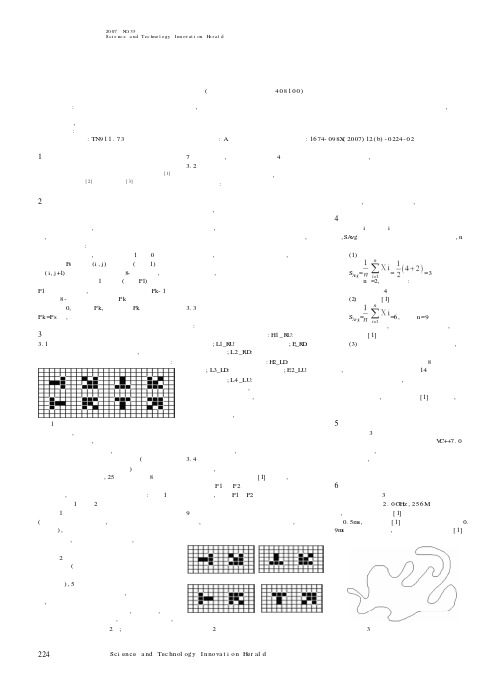
3新算法3.1提出的模型和分析通过对二值图像的观察和分析,我们发现前两个像素和下一个像素的位置关系有以下几种:图1已知前两个像素第三个像素可能的位置关系比如说,第一行的第二列这个图形是已知从上方来的两个像素,第三个像素的可能的位置是下面的三个位置。
同样地,按照从不同的方向的前两个像素和第三个像素的位置关系(其中白色方框中是第三个像素的可能的位置)从中我们可以看出,25个像素中有8个像素是边缘跟踪过程中的不可能出现的像素。
其中,拿出最有概括性的两种情形:即图1中的第一行左1和左2。
左1的情形是已知两个像素是从左边到右边(这种情形是水平的情形,它和竖直的情形处理方式一致),三个白框内的像素是第三个像素的可能出现的位置,根据边缘连续的理论,不可能是其他的像素。
左2的情形是已知从左上角到右下角的两个像素的情形(它和右上角到左下角的情形、左下角到右上角情形以及从右下角到左上角情形处理方式一致),5个白框中的像素是这些情形的第三个像素可能出现的位置。
机器视觉中的二值化与边缘检测技术研究随着科技的不断进步,在机器视觉领域中的二值化和边缘检测技术已经成为了必不可少的技术手段。
本文将介绍机器视觉中的二值化和边缘检测技术的概念和原理,并阐述其在实际应用中的重要性。
一、二值化技术概述二值化是指将灰度图像的像素值转化为0或1的二维矩阵,用于分离目标对象和背景。
二值化技术是图像处理中最常用的基本处理方法之一,其实现原理是将图像中的灰度值映射到0和255两个灰度值之间,从而使得图像呈现出黑白分明的效果,便于后续的处理和分析。
在机器视觉领域,二值化技术可应用于图像的分割、识别、增强和去噪等方面。
例如,在OCR文字识别中,采用二值化技术将图片转化为黑白图像,可以大大提高识别准确率。
此外,在医学图像分析中,二值化技术可用于识别疾病病变区域,提高医学诊断的准确性。
二、边缘检测技术概述边缘检测是指在图像中寻找边缘的过程。
在图像中,边缘一般被定义为颜色、亮度等突变的地方,它是图像中最基本的特征之一。
边缘检测技术可应用于目标检测、视觉跟踪、图像分割、三维重建等领域。
常用的边缘检测算法包括Canny算子、Sobel算子和Laplacian 算子等。
Canny算子是一种常见的边缘检测算法,其将边缘检测问题转化为一个优化问题,并采用高斯滤波、非极大值抑制和双阈值等方法进行边缘检测。
三、二值化和边缘检测的应用案例1、物体识别在智能制造领域,二值化和边缘检测技术可应用于物体识别和分拣领域。
例如,对于自动化仓库中的物品识别,采用二值化和边缘检测技术可以准确识别出目标物体并进行分拣。
2、人脸检测在安防领域,人脸识别技术已经得到广泛应用。
在人脸检测的过程中,需要对人脸图像进行二值化和边缘检测操作,以获取人脸的轮廓并进行特征提取和分析。
3、医学诊断在医学诊断中,二值化和边缘检测技术可用于识别疾病病变区域。
例如,在肺癌病人的CT图像中,通过对图像进行二值化和边缘检测,可以准确识别出病变部位,为医生的诊断提供支持。
轮廓识别算法
轮廓识别算法是一种数字图像处理算法,用于从二值化、边缘检测或阈值化的图像中提取目标物体的外形边缘。
轮廓识别算法通常采用基于边缘跟踪的方法,通过对边缘像素的追踪,将相邻的边缘像素连接成一条闭合的边缘,从而得到目标物体的轮廓。
在轮廓识别算法中,常用的算法包括:
1.基于连通性的轮廓识别算法:该算法基于像素的连通性,通过搜索所有像素点,将具有相同颜色的像素点相连组成连通区域,并确定该区域的外围轮廓。
2.基于边缘检测的轮廓识别算法:该算法通过对原始图像进行边缘检测,得到一组离散的边缘像素点,然后对这些像素点进行追踪,将相邻的边缘像素连接成一条闭合的边缘。
3.基于分割的轮廓识别算法:该算法先将原始图像分割成多个区域,然后选取具有显著边界的区域,通过对这些区域的边界像素进行追踪,得到目标物体的轮廓。
轮廓识别算法在数字图像处理、计算机视觉、机器人等领域有广泛的应用,例如物体识别、图像分割、目标跟踪、自动化控制等。