串联校正详解
- 格式:ppt
- 大小:1.87 MB
- 文档页数:50
串联校正系统设计串联校正系统是一种通过对输入信号进行处理,使输出信号与期望值接近的自动控制系统。
它是由控制器、执行器和传感器组成的闭环控制系统。
控制器接收传感器采集到的实际值,并根据期望值和实际值的差异进行调节,以控制执行器的动作,从而实现对系统的校正。
1. 串联校正系统的目标串联校正系统的设计目标是实现对于被控对象的精确控制。
即使在外部环境变化或者被控对象参数变化的情况下,系统也能够快速响应并实现稳定的控制效果。
2. 串联校正系统的设计原则(1)稳定性原则:设计稳定的传感器和控制器,保障系统在外部环境变化时具有良好的稳定性。
(2)精度原则:保持系统的精度,要求传感器和控制器能够对于被控对象的参数进行准确测量和调节。
(3)快速响应原则:设计快速响应的控制器,使系统能够在外部环境变化时快速调整输出,实现对被控对象的快速校正。
(4)可靠性原则:确保系统具有良好的可靠性,降低控制系统发生故障的可能性。
1. 传感器的选择传感器是串联校正系统中的重要组成部分,它能够对被控对象的参数进行测量,并将实际值反馈给控制器。
传感器的选择应当根据被控对象的特性和要求来确定。
一般来说,需要考虑传感器的测量范围、测量精度、输出信号类型等因素。
2. 控制器的设计控制器是串联校正系统的核心部分,它根据传感器反馈的实际值和期望值之间的差异,调节执行器的动作,以实现对被控对象的校正。
在控制器的设计中,需要考虑控制算法的选择、控制器的响应速度、系统的稳定性等因素。
4. 串联校正系统的整体设计在进行串联校正系统的设计时,需要考虑传感器、控制器和执行器之间的匹配关系,确保它们能够协同工作,实现对被控对象的精确控制。
同时还需要考虑系统的稳定性、可靠性和安全性等方面。
五、串联校正系统的应用案例下面以某汽车制造厂生产线上的串联校正系统为例,介绍串联校正系统的具体应用。
某汽车制造厂生产线上的串联校正系统主要用于对汽车轮胎的气压进行校正。
传感器通过对轮胎气压进行测量,将实际值反馈给控制器。
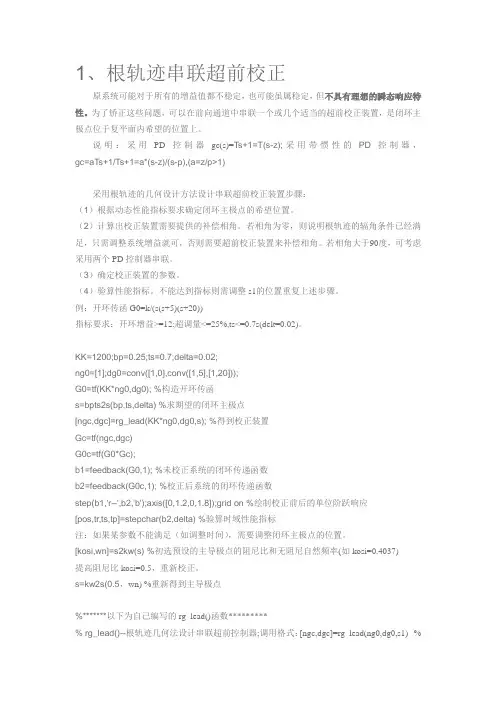
1、根轨迹串联超前校正原系统可能对于所有的增益值都不稳定,也可能虽属稳定,但不具有理想的瞬态响应特性。
为了矫正这些问题,可以在前向通道中串联一个或几个适当的超前校正装置,是闭环主极点位于复平面内希望的位置上。
说明:采用PD控制器gc(s)=Ts+1=T(s-z);采用带惯性的PD控制器,gc=aTs+1/Ts+1=a*(s-z)/(s-p),(a=z/p>1)采用根轨迹的几何设计方法设计串联超前校正装置步骤:(1)根据动态性能指标要求确定闭环主极点的希望位置。
(2)计算出校正装置需要提供的补偿相角。
若相角为零,则说明根轨迹的辐角条件已经满足,只需调整系统增益就可,否则需要超前校正装置来补偿相角。
若相角大于90度,可考虑采用两个PD控制器串联。
(3)确定校正装置的参数。
(4)验算性能指标。
不能达到指标则需调整s1的位置重复上述步骤。
例:开环传函G0=k/(s(s+5)(s+20))指标要求:开环增益>=12;超调量<=25%,ts<=0.7s(delt=0.02)。
KK=1200;bp=0.25;ts=0.7;delta=0.02;ng0=[1];dg0=conv([1,0],conv([1,5],[1,20]));G0=tf(KK*ng0,dg0); %构造开环传函s=bpts2s(bp,ts,delta) %求期望的闭环主极点[ngc,dgc]=rg_lead(KK*ng0,dg0,s); %得到校正装置Gc=tf(ngc,dgc)G0c=tf(G0*Gc);b1=feedback(G0,1); %未校正系统的闭环传递函数b2=feedback(G0c,1); %校正后系统的闭环传递函数step(b1,'r--',b2,'b');axis([0,1.2,0,1.8]);grid on %绘制校正前后的单位阶跃响应[pos,tr,ts,tp]=stepchar(b2,delta) %验算时域性能指标注:如果某参数不能满足(如调整时间),需要调整闭环主极点的位置。
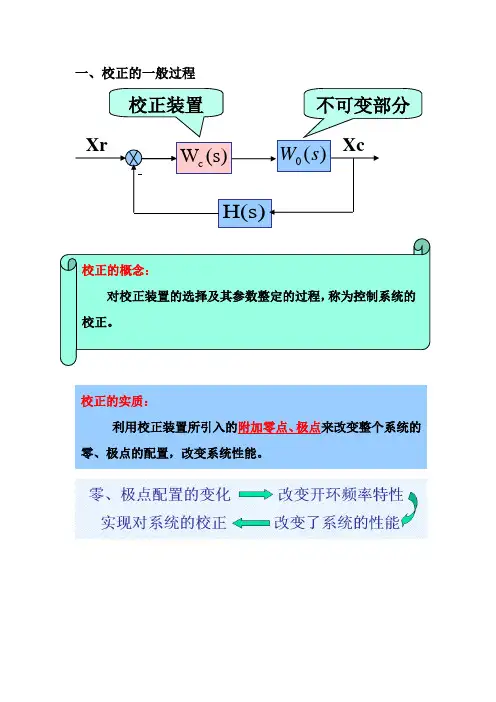
一、校正的一般过程二、校正的基本方法根据控制装置位置、与不可变部分的连接方式1、串联校正 简单 对系统参数变化适应能力差2、反馈校正 复杂 对系统参数变化适应能力强3、前馈校正 提高系统的精度(基于开环补偿)有三种校正方法串联校正反馈校正 前馈校正三、用频率法校正的特点对系统进行校正的基本类型:暂态性能满意稳态性能满意暂态性能不满意稳态误差过大暂态性能较差稳态误差过大第一节控制系统校正的一般概念对数频率特性低频段——稳态误差中频段——稳定性、相对稳定性、暂态性能高频段——抗干扰性足够的稳定裕量满意的暂态响应足够的增益校正后的控制系统第一节控制系统校正的一般概念用频率法校正系统的特点:直观、准确、物理概念强,易于初步设计系统用频率法校正系统所依据的频域指标:相位裕量γ(ωc)截止频率ωc误差系数k v 、k v、k a 增益裕量GM谐振峰值M p频带宽度ωb ▲▲▲第二节串联校正1使用无源串联超前校正装置时,必须加放大器,其 放大倍数为γd ,以补偿校正装置对信号的衰减作用 频率特性: (假设已补偿衰减作用)21)(ωω-ωω=ωϕarctgarctgCR T 2=,其中T11=ω12ωγγωd dT ==<111111)(22++=++=s TTs s CR Cs R s W dd dd c γγγγ1121>+=R R R d γ2111111111)(ωωωωωγωωωγωωωjj jj T jT j j W d dc ++=++=++=222111lg20)(lg 20)(⎪⎪⎭⎫ ⎝⎛+⎪⎪⎭⎫ ⎝⎛+==ωωωωωωA L。

串联校正的三种方法-回复串联校正是一种使得测量系统保持精确度和准确性的重要技术。
它通过将多个测量设备按照特定的顺序连接在一起,并校正它们之间的误差,从而保证整个系统的测量结果的准确性。
本文将介绍串联校正的三种方法,包括公式法、参考法和数据校正法。
首先,公式法是一种基于数学公式的串联校正方法。
它通过推导出特定测量设备之间的数学公式,将测量结果进行修正。
例如,在测量长度的情况下,我们可以将两个测量仪器的测量结果相加,再减去它们之间的差异,从而得到准确的长度值。
这种方法简单、快速,并且可以适用于各种测量领域。
其次,参考法是一种基于参考物质或参考标准的串联校正方法。
它通过与已知准确数值相关的参考物质或参考标准进行测量,从而得到待测设备的修正系数。
例如,在温度测量中,我们可以使用已知温度的热力计作为参考物质,通过比较其测量结果与待测设备的结果,计算出待测设备的修正系数。
这种方法具有较高的精确度,但需要准确的参考物质或标准,并且在实际操作中较为复杂。
最后,数据校正法是一种基于已有数据集进行校正的串联校正方法。
它通过采集大量的数据并进行分析,找出数据之间的规律和误差,并对测量系统进行修正。
例如,在图像处理中,我们可以收集大量的标准图像数据,并与测量系统测得的图像进行比较,找出误差,并对系统进行校正。
这种方法适用于大规模数据的处理,但需要高质量的数据和相应的数据分析工具。
在实际应用中,不同的方法可以根据具体情况和要求选择使用。
例如,在工业生产中,公式法常常用于对测量仪器的误差进行简单修正。
而在科学研究领域,参考法和数据校正法则更常被采用,以保证测量结果的高精确度和可靠性。
总之,串联校正是一种重要的技术,可以保证测量系统的精确度和准确性。
公式法、参考法和数据校正法是常用的三种串联校正方法,它们在不同领域和应用中具有各自的特点和适用性。
通过合理选择和使用这些方法,我们可以更好地保证测量结果的准确性,为科学研究和工业生产提供可靠支持。
常用的串联校正方式今天咱们来聊一个特别有趣的东西,就像给小机器人们调整它们的“行为”一样的东西,这就是串联校正方式。
你们有没有玩过那种搭积木的游戏呀?咱们可以把一个小机器想象成是用积木搭起来的。
有时候这个小机器运转得不太对,就像搭好的积木塔有点歪歪扭扭的。
这时候串联校正方式就像是我们去给这个积木塔加一些小支撑或者调整一下积木的位置,让它变得稳稳当当的。
有一种串联校正方式就像是给机器加上一个小助手。
比如说有个小风扇,它转得太快了,风呼呼地吹得人都受不了。
这时候如果有一种校正方式就像是给小风扇的控制电路里加了一个小小的“冷静器”。
这个“冷静器”会告诉小风扇,不要转得那么快啦。
就像我们在跑步的时候,如果跑得太快累得气喘吁吁,有个小伙伴在旁边拉着我们说:“慢一点呀,慢一点。
”这就是一种让机器变得更合适、更听话的方式。
还有一种呢,就像是给机器一个小提示。
想象一下,有个小灯,它总是一闪一闪的,闪得人眼睛都花了。
这个时候的串联校正方式就像是给小灯一个小纸条,上面写着:“你要慢慢地闪,有规律地闪哦。
”然后小灯就按照这个小提示,变得很乖,闪得很有节奏,不再让人觉得眼花缭乱了。
再给你们讲个故事吧。
有个小机器人,它的任务是沿着一条黑线走。
可是这个小机器人总是走歪,不是走到黑线外面去,就是撞到东西。
工程师们就用了一种串联校正方式。
他们就像是给小机器人戴上了一个有魔法的眼镜。
这个眼镜能让小机器人更清楚地看到黑线,知道自己应该往哪里走。
小机器人戴上这个“魔法眼镜”之后,就稳稳地沿着黑线走啦,再也不会到处乱撞了。
串联校正方式就像是我们给机器朋友们的小帮手、小提示或者小魔法。
它能让机器们更好地工作,不会出乱子。
就像我们在学校里,如果我们写字写得歪歪扭扭的,老师给我们一个小小的示范,告诉我们怎么把字写得工整,这也是一种校正呢。
机器们也需要这样的校正,这样它们就能更好地为我们服务啦。
所以呀,串联校正方式虽然听起来有点复杂,但是就像我们生活里的很多小事情一样,都是为了让东西变得更好、更合适呢。
串联校正6.3.1串联超前校正(基于频率响应法)用频率法对系统进行校正的基本思路是:通过所加校正装置,改变系统开环频率特性的形状,即要求校正后系统的开环频率特性具有如下特点:✍低频段的增益充分大,满足稳态精度的要求;✍中频段的幅频特性的斜率为-20dB/dec,并具有较宽的频带,这一要求是为了系统具有满意的动态性能;✍高频段要求幅值迅速衰减,以较少噪声的影响。
用频率法对系统进行超前校正的基本原理,是利用超前校正网络的相位超前特性来增大系统的相位裕量,以达到改善系统瞬态响应的目点。
为此,要求校正网络最大的相位超前角出现在系统的截止频率(剪切频率)处。
对截止频率没有特别要求时。
用频率法对系统进行串联超前校正的一般步骤可归纳为:✍根据稳态误差的要求,确定开环增益K。
✍根据所确定的开环增益K,画出未校正系统的波特图,计算未校正系统的相位裕度 。
✍根据截止频率c ω''的要求,计算超前网络参数a 和T ;关键是选择最大超前角频率等于要求的系统截止频率,即c m ωω''=,以保证系统的响应速度,并充分利用网络的相角超前特性。
显然,c m ωω''=成立的条件是a L L c c c o lg 10)()(==''-ωω (6-35)由上式可求出aa T m ω1= (6-36)由(6-36)求出T。
✍验证已校正系统的相位裕度γ''。
✍由给定的相位裕度值γ,计算超前校正装置提供的相位超前量ϕ,即补偿校正前给定的←+-==↑↑''εγϕϕγmε是用于补偿因超前校正装置的引入,使系统截止频率增大而增加的相角滞后量。
ε值通常是这样估计的:如果未校正系统的开环对数幅频特性在截止频率处的斜率为-40dB/dec ,一般取︒︒=10~5ε;如果为-60dB/dec 则取︒︒=20~15ε。
✍根据所确定的最大相位超前角m ϕ按m ma ϕϕsin 1sin 1-+=(6-37) 算出a 的值。