上银KK模组马达座与马达连接
- 格式:pdf
- 大小:2.39 MB
- 文档页数:3
Tel: +886-4-23550110 Fax: +886-4-23550123 E-mail: business@
馬達參數下載步驟
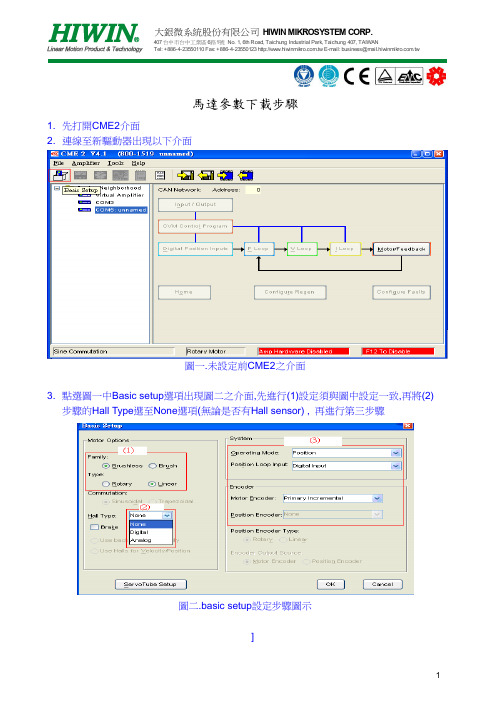
1. 先打開CME2介面
2. 連線至新驅動器出現以下介面
圖一.未設定前CME2之介面
3. 點選圖一中Basic setup選項出現圖二之介面,先進行(1)設定須與圖中設定一致,再將(2)
步驟的Hall Type選至None選項(無論是否有Hall sensor) , 再進行第三步驟
圖二.basic setup設定步驟圖示
]
Tel: +886-4-23550110 Fax: +886-4-23550123 E-mail: business@
4. 完成步驟3.後,點選圖一中之motor/feedback選項,出現介面如圖三所示,按下紅框處,
選取正確的馬達參數檔案
圖三.馬達參數輸入介面
5. 在結束馬達參數設定後,若有Hall sensor時,即回到圖二將Hall type選至Digital或
analog選項,再存至驅動器之flash中。

简析上银kk模组的六大特征分别指的是哪些?简析上银kk模组的六大特征分别指的是哪些?我们都知道上银kk模组作为一种能供给直线运动的机械结构,可卧式或者立式使用,也可以组合成特定的运动机构使用——即自动化行业中通常称为XY轴、XYZ轴等多轴向运动机构。
是继直线导轨,滚珠丝杆直线传动机构的自动化升级单元。
可以通过各个单元的组合实现负载的直线,曲线运动,是轻负载的自动化更加快捷,定位更加精准。
今日我要给大家介绍的就是关于上银kk模组相关产品学问,希望能给大家带来帮忙哦!上银KK模组六大特征:1、刚度对于慎密机械与仪器尤为紧要,模块变形搜罗导轨本体变形导轨副接触变形,导轨抵当受力变形的本领。
变形将影响构件之间的相对地位和导向精度,两者均应考虑。
2、运动灵敏度和定位精度直线导轨运动灵敏度是指运动构件能实现的最小行程;定位精度是指运动构件能按恳求遏制在地位的本领。
运动灵敏度和定位精度与导轨类型、摩擦特点、运动速度、传动刚度、运动构件质量等成分有关。
3、导向精度以及模块和支承件的热变形等,导向精度是指运动构件沿导轨导面运动时其运动轨迹的精准程度。
影响导向精度的紧要成分有导轨承导面的几何精度、导轨的结构类型、导轨副的接触精度、表面粗糙度、导轨和支承件的刚度、导轨副的油膜厚度及油膜刚度。
直线运动导轨的几何精度个别搜罗:垂直平面和程度平面内的直线度;两条导轨面间的平行度,导轨几何精度可以用导轨全长上的误差或单位长度上的误差暗示。
4、精度坚持性:是指工作过程中连结原有几何精度的本领。
模块的精度坚持性紧要取决于导轨的耐磨性极其尺寸稳定性。
耐磨性与导轨副的资料匹配、受力、加工精度、润滑编制和防护装置的性能的成分有关。
导轨及其支承件内的残剩应力也会影响导轨的精度坚持性。
5、运动平稳性模块运动平稳性是引导轨在低速运动或微量移动时不显现爬行现象的性能。
平稳性与导轨的结构、导轨副材料的匹配、润滑情形、润滑剂性质及导轨运动之传动系统的刚度等成分有关。
安昂上银KK模组,精密线性KK模组,KK模组的优势上银KK模组优点及特点:上银KK模组和精密线性KK模组为马达驱动之单一复合件,为最佳化设计之模组平台。
上银KK模组由滚珠螺杆与U型结构之线性滑轨构成,运用复合化、轻量化与模组化之趋势,结合高精度、高负载与高刚性等设计理念所自行开发。
东莞安昂为您提供台湾上银(HIWIN)KK 模组可节省安装使用空间与维修成本;已广泛应用在精密机械、半导体设备与其他需要精密定位的机构上,并获台湾精品金质奖殊荣。
上银KK模组/导轨引动器KR型特点如下:(1)多工设计:整合驱动用的滚珠螺杆及导引用U型轨道,除提供精密直线运动,也能搭配多功能配件。
在导入多用途之应用设计时非常方便,也能达成高精密线性传动之需求。
(2)体积小重量轻:U型轨道可当导引轨道,亦用搭平台结构,大幅缩小安装体积,并以有限元素法设计出最佳化结构,得到最佳刚性与重量比例。
低扭力与低惯量之平顺定位运动,可减少能源耗用(3)高精度与高刚性:籍由各方向的荷重对钢珠接触位置的变形量分析,得知此精密线性模组具高精度与高刚性之特性。
以有限元素法之最佳化结构设计,得到最佳刚性与重量比例。
(4)检测容易与配备齐全:定位精度、定位重现性、行走平行度及起动扭力等功能容易检测。
(5)组装便利与维护容易:组装人员不需专业熟手可以组装完成。
良好之防尘与润滑,容易维护保养,提供机台报废后之再生利用。
(6)用途:检查机台,点胶机,表面粘着设备,机械手臂,粘晶机,覆晶机。
亦可依客户设计要求组合XY平台。
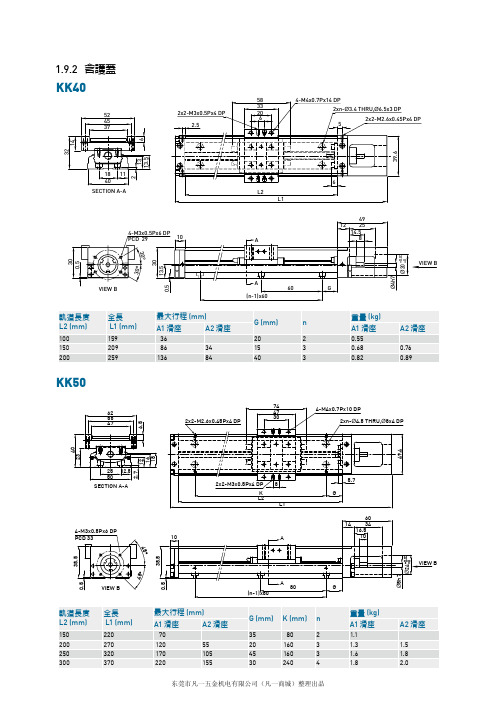
(7)形式:KK100、KK86、KK60、KK50、KK40。
上银KK模组,精密线性模组,KK模组KK模组精密级:KK4001P-100A1-F0、KK4001P-150A1-F0、KK4001P-200A1-F0;KK5002P-150A1-F0、KK5002P-200A1-F0、KK5002P-250A1-F0、KK5002P-300A1-F0;KK6005P-150A1-F0、KK6005P-200A1-F0、KK6005P-300A1-F0、KK6005P-400A1-F0、KK6005P-500A1-F0、KK6005P-600A1-F0;KK6010P-150A1-F0、KK6010P-200A1-F0、KK6010P-300A1-F0、KK6010P-400A1-F0、KK6010P-500A1-F0、KK6010P-600A1-F0;KK8610P-340A1-F0、KK8610P-440A1-F0、KK8610P-540A1-F0、KK8610P-640A1-F0、KK8610P-740A1-F0、KK8610P-940A1-F0;KK8620P-340A1-F0、KK8620P-440A1-F0、KK8620P-540A1-F0、KK8620P-640A1-F0、KK8620P-740A1-F0、KK8620P-940A1-F0;KK10020P-980A1-F0、KK10020P-1080A1-F0、KK10020P-1180A1-F0、KK10020P-1280A1-F0、KK10020P-1380A1-F0;KK13025P-980A1-F0、KK13025P-1180A1-F0、KK13025P-1380A1-F0、KK13025P-1680A1-F0; KK模组普通级:KK4001C-100A1-F0、KK4001C-150A1-F0、KK4001C-200A1-F0;KK5002C-150A1-F0、KK5002C-200A1-F0、KK5002C-250A1-F0、KK5002C-300A1-F0;KK6005C-150A1-F0、KK6005C-200A1-F0、KK6005C-300A1-F0、KK6005C-400A1-F0、KK6005C-500A1-F0、KK6005C-600A1-F0;KK6010C-150A1-F0、KK6010C-200A1-F0、KK6010C-300A1-F0、KK6010C-400A1-F0、KK6010C-500A1-F0、KK6010C-600A1-F0;KK8610C-340A1-F0、KK8610C-440A1-F0、KK8610C-540A1-F0、KK8610C-640A1-F0、KK8610C-740A1-F0、KK8610C-940A1-F0;KK8620C-340A1-F0、KK8620C-440A1-F0、KK8620C-540A1-F0、KK8620C-640A1-F0、KK8620C-740A1-F0、KK8620C-940A1-F0;KK10020C-980A1-F0、KK10020C-1080A1-F0、KK10020C-1180A1-F0、KK10020C-1280A1-F0、KK10020C-1380A1-F0;KK13025C-980A1-F0、KK13025C-1180A1-F0、KK13025C-1380A1-F0、KK13025C-1680A1-F0安昂传动传动世界,、。
马达的接线方法通常的电动机是Y型接法电压为380V △接法电压为220V目前电动机的接法有两种(参考电机铭牌):一:额定电压380V/220V,接法为星/三角。
这表明电机每相绕组的额定电压为220V,如果电源线电压为220V,定子绕组则应接成三角形,如果电源电压为380V,则应接成星形。
切不可误将星形接成三角形,将烧毁电机。
二:额定电压为380V,接法为三角形,这表明定子每相绕组的额定电压是380V,适用于电源线电压为380V的场合。
如果电机额定电压为220V(日本工业电压为220V,电机额定电压为220V,民用照明为110V),电机原接法为三角形,可改成星形接法接到380V电压上。
如电机已经是星形接法,则不能再接到380V电源上。
型号:YDW1.5-6,36槽YDW系列(三相异步电动机) )型号额定功率(kW) 转速(r/min) 电流A) 效率(%) 功率因数(cosΦ)YDW1.5-6 1.5 920 4.2 75 0.73额定参数额定电压:380V 额定频率:50Hz 工作方式:连续(S1) 绝缘等级:B级、F级防护等级:IP44、IP54二:额定电压为380V,接法为三角形,这表明定子每相绕组的额定电压是380V,适用于电源线电压为380V的场合。
大多数电工都知道,三相电动机的三相定子绕组每相绕组都有两个引出线头。
一头叫做首端,另一头叫末端。
规定第一相绕组首端用D 1表示,末端用D 4表示;第二相绕组首端用D2表示,末端用D5表示;第三相绕组首末端分别用D3和D6来表示。
这六个引出线头引入接线盒的接线柱上,接线柱相应地标出D1~D6的标记。
三相定子绕组的六根端头可将三相定子绕组接成星形或三角形,星形接法是将三相绕组的末端并联起来,即将D4、D5、D6三个接线柱用铜片连结在一起,而将三相绕组首端分别接入三相交流电源,即将D1、D2、D3分别接入A、B、C相电源,而三角形接法则是将第一相绕组的首端D 1与第三相绕组的末端D6相连接,再接入一相电源;第二相绕组的首端D2与第一相绕组的末端D4相连接,再接入第二相电源;第三相绕组的首端D3与第二相绕组的末端D5相连接,再接入第三相电源。

汽车马达的正确连接方法
汽车马达的正确连接方法如下:
1. 首先,确保车辆的电源关闭,以免触电或引发意外。
2. 找到汽车马达的电源线和接线端子。
电源线通常为红色,并标有正极符号(+),而接线端子通常为金属接头。
3. 将电源线的接线端子与车辆的正极连接。
车辆的正极通常由红色塑料帽标识,并连接到蓄电池的正极。
4. 确保电源线与车辆正极完全接触,并紧固紧固螺母或夹子,以确保连接牢固。
5. 接下来,将马达的接地线连接到车辆的负极。
接地线通常为黑色,并标有负极符号(-)。
6. 找到车辆的负极,通常是黑色塑料帽标识,并连接到蓄电池的负极。
7. 确保接地线与车辆负极完全接触,并紧固紧固螺母或夹子,以确保连接牢固。
8. 检查所有连接点是否安全可靠,并确保没有松动的接线或裸露的电线。
9. 最后,重新启动车辆的电源,并测试马达是否正常工作。
请注意,上述连接方法是一般的指南,具体的连接方法可能根据您所使用的具体马达和车辆的不同而有所变化。
为了确保正确连接和避免意外,建议您参考车辆和马达的制造商提供的详细连接说明和建议。
马达启动继电器安装接线方法马达启动继电器是一种常用的电子元件,用于控制电动机的启动和停止。
在工业生产和家庭用电中都有广泛应用,安装接线方法正确与否直接影响到电机的正常运行和寿命。
本文将介绍马达启动继电器的安装接线方法,希望能对读者有所帮助。
一、马达启动继电器的基本原理马达启动继电器是一种电磁继电器,由电磁铁和触点组成。
当继电器通电时,电磁铁产生磁场,使触点闭合,电动机得以启动。
当继电器断电时,电磁铁失去磁力,触点断开,电动机停止运转。
马达启动继电器的作用是在启动电机时提供大电流,以克服电机的起动电流过大的问题,保护电机和电源。
二、马达启动继电器的安装位置马达启动继电器应安装在电机的电源线路上,一般放置在电机的控制盘中,距离电机尽量近,以减少电线的损耗和干扰。
如果电源电压较高,应采用高压继电器,以达到更好的效果。
三、马达启动继电器的接线方法1、单相电机的接线方法(1)直接启动法:将电源线L和电机线L1直接连接,电源线N 和电机线N1直接连接,启动电机即可。
(2)带热继电器起动法:将电源线L和电机线L1直接连接,电源线N和电机线N1直接连接,热继电器的线圈接在电机线L1和L2之间,热继电器的触点K1和K2分别接在电源线L和电机线L2之间,启动电机即可。
2、三相电机的接线方法(1)直接启动法:将电源线L1、L2、L3分别与电机线L1、L2、L3连接,启动电机即可。
(2)带热继电器起动法:将电源线L1、L2、L3分别与电机线L1、L2、L3连接,热继电器的线圈接在电机线L2和L3之间,热继电器的触点K1和K2分别接在电源线L1和电机线L3之间,启动电机即可。
四、马达启动继电器的注意事项1、安装前应检查继电器的额定电压和额定电流是否符合电动机的要求。
2、安装时应注意继电器的线圈和触点的极性,避免接错。
3、安装时应注意继电器的接线孔和电线的规格是否相符,以防接线过紧或过松。
4、安装后应进行电气测试,检查继电器的工作状态是否正常,如有异常应及时处理。
语音模块接马达线方法在科技快速发展的今天,语音模块与各类设备的结合越来越紧密。
马达作为常见的执行器,与语音模块的连接显得尤为重要。
本文将详细介绍如何将语音模块接上马达线,以实现语音控制马达的功能。
一、准备工作1.确认所需材料:语音模块、马达、马达线、杜邦线、电源、电烙铁、焊接材料等。
2.了解语音模块和马达的接口类型及规格,确保它们之间可以正常连接。
3.查阅相关资料,了解语音模块的控制指令及编程方法。
二、连接步骤1.将马达线与马达连接好,确保连接正确无误。
2.将语音模块的输出接口与马达线的控制端连接。
通常,语音模块的输出接口为杜邦针脚,需要使用杜邦线进行连接。
3.如果语音模块和马达的电压相同,可以直接将它们连接;如果不同,可以使用电压转换模块进行适配。
4.将电源与语音模块和马达连接,确保正负极正确无误。
5.使用电烙铁和焊接材料,将连接线焊接固定,防止连接不良或接触不良。
6.检查所有连接是否牢固,确认无误后,可以进行下一步的调试。
三、调试与测试1.根据语音模块的说明书,编写相应的控制程序,使语音模块能够识别特定指令并输出控制信号。
2.将语音模块与马达连接至电脑,通过编程软件进行调试,观察马达是否能够根据语音指令进行相应的动作。
3.不断调整参数,直到达到满意的控制效果。
4.进行长时间运行测试,确保系统稳定可靠。
四、注意事项1.在连接过程中,注意正负极的连接,防止短路或损坏设备。
2.焊接时,注意温度控制,避免烫伤或损坏设备。
3.调试过程中,注意观察设备运行状态,发现异常及时处理。
4.严格遵守操作规程,确保人身和设备安全。
通过以上步骤,相信您已经掌握了将语音模块接上马达线的方法。
在实际应用中,可以根据具体需求,选择合适的语音模块和马达,实现丰富的功能。
马达驱动芯片与马达搭配方法1. 马达驱动芯片的基本原理马达驱动芯片指的是一种功能强大、能够控制马达运转的集成电路。
它通常由一个或多个H桥驱动器组成,可以通过控制电流和电压的方式实现马达的正反转。
马达驱动芯片的主要作用是保护马达不受过流、过热及短路等问题的影响,同时可以使马达的运行更为平稳、快速、高效。
2. 马达驱动芯片的种类马达驱动芯片的种类较多,通常可分为直流马达驱动芯片、步进马达驱动芯片、无刷直流马达驱动芯片等多种。
其中,直流马达驱动芯片主要适用于大型的直流马达;步进马达驱动芯片适用于控制一些需要精密定位和控制的马达;无刷直流马达驱动芯片则适用于高转速、高效率的马达。
3. 马达与马达驱动芯片的搭配方法在使用马达时,我们通常需要选择一款适合的马达驱动芯片来配合使用,以提高马达的性能和稳定性。
以下是一些常用的马达与马达驱动芯片配合的方法:3.1 直流马达与直流马达驱动芯片搭配直流马达是一种最基本的电机,通常通过控制驱动电流和电压来控制转速。
直流马达驱动芯片通过PWM脉冲信号控制高低电平的占空比,从而控制电机的电流、电压输出和转速。
常用的直流马达驱动芯片有L298、L293D等。
3.2 步进马达与步进马达驱动芯片搭配步进马达的控制需要伺服控制器,步进马达驱动芯片则通过控制驱动脉冲来改变马达的运动。
每一次脉冲,马达的转动角度就会发生变化。
常用的步进马达驱动芯片有ULN2003、A4988等。
3.3 无刷直流马达与无刷直流马达驱动芯片搭配无刷直流马达是一种通过外置电子换向器实现网上管理的新型马达,它的特点是高转速、低功耗。
而在无刷直流马达的控制中,需要用到一款无刷直流马达驱动芯片,通过不同的信号脉冲控制换向器的切换,从而驱动无刷直流马达运行。
常用的无刷直流马达驱动芯片有DRV8312、ILQ615等。
4. 马达驱动芯片的应用马达驱动芯片广泛应用于各种电气设备中。
例如机器人、无人机、数控机床、电动自行车、工业自动化等领域。