自动控制实验报告1
- 格式:docx
- 大小:205.93 KB
- 文档页数:7
实验一环典型环节节及其阶跃响应班级:学号:姓名:一、实验目的1.学习构成典型环节的模拟电路,了解电路参数对环节特性的影响;2.学习典型环节阶跃响应的测量方法,并学会根据阶跃响应曲线计算典型环节的传递函数;二、实验仪器1.EL-AT-II型自动控制系统实验箱一台2.计算机一台三、实验原理1.模拟实验的基本原理:控制系统模拟实验采用复合网络法来模拟各种典型环节,即利用运算放大器不同的输入网络和反馈网络模拟各种典型环节,然后按照给定系统的结构图将这些模拟环节连接起来,便得到了相应的模拟系统。
再将输入信号加到模拟系统的输入端,并利用计算机等测量仪器,测量系统的输出,便可得到系统的动态响应曲线及性能指标。
若改变系统的参数,还可进一步分析研究参数对系统性能的影响。
2.时域性能指标的测量方法:超调量Ó%:1)启动计算机,在桌面双击图标[自动控制实验系统] 运行软件。
2)测试计算机与实验箱的通信是否正常,通信正常继续。
如通信不正常查找原因使通信正常后才可以继续进行实验。
3)连接被测量典型环节的模拟电路。
电路的输入U1接A/D、D/A卡的DA1输出,电路的输出U2接A/D、D/A卡的AD1输入。
检查无误后接通电源。
4)在实验课题下拉菜单中选择实验一[典型环节及其阶跃响应] 。
5)鼠标单击实验课题弹出实验课题参数窗口。
在参数设置窗口中设置相应的实验参数后鼠标单击确认等待屏幕的显示区显示实验结果。
6)用软件上的游标测量响应曲线上的最大值和稳态值,代入下式算出超调量:YM A X- Y∞Ó%=——————×100%Y∞ T P 与T S :利用软件的游标测量水平方向上从零到达最大值与从零到达95%稳态 值所需的时间值,便可得到T P 与T S 。
四、实验内容构成下述典型一阶系统的模拟电路,并测量其阶跃响应: 1.比例环节的模拟电路及其传递函数:G (s )=-R1/R22.惯性环节:G(s)= -K/TS+1 K=R2/R1 ,T=R2C; 3.积分环节 G(S)= 1/TS T=RC 4.微分环节G(S)=-RCS5.比例+微分环节G(S)= -K(TS+1) K=R2/R1 T=R2C6.比例+积分环节G(S)=K(1+1/TS) K=R2/R1 T=R2C五、实验步骤1.启动计算机,在桌面双击图标【自动控制实验系统】运行软件。
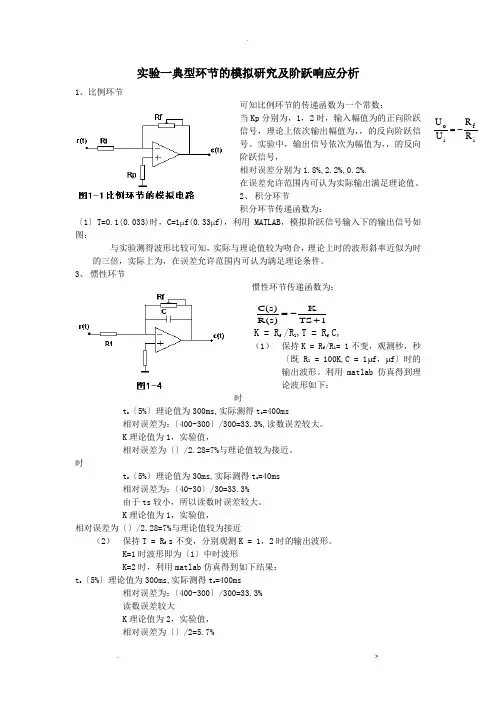
实验一典型环节的模拟研究及阶跃响应分析1、比例环节可知比例环节的传递函数为一个常数:当Kp 分别为,1,2时,输入幅值为的正向阶跃信号,理论上依次输出幅值为,,的反向阶跃信号。
实验中,输出信号依次为幅值为,,的反向阶跃信号,相对误差分别为1.8%,2.2%,0.2%.在误差允许范围内可认为实际输出满足理论值。
2、 积分环节积分环节传递函数为:〔1〕T=0.1(0.033)时,C=1μf(0.33μf),利用MATLAB ,模拟阶跃信号输入下的输出信号如图:与实验测得波形比较可知,实际与理论值较为吻合,理论上时的波形斜率近似为时的三倍,实际上为,在误差允许范围内可认为满足理论条件。
3、 惯性环节惯性环节传递函数为:K = R f /R 1,T = R f C,(1) 保持K = R f /R 1= 1不变,观测秒,秒〔既R 1 = 100K,C = 1μf ,μf 〕时的输出波形。
利用matlab 仿真得到理论波形如下:时t s 〔5%〕理论值为300ms,实际测得t s =400ms 相对误差为:〔400-300〕/300=33.3%,读数误差较大。
K 理论值为1,实验值,相对误差为〔〕/2.28=7%与理论值较为接近。
时t s 〔5%〕理论值为30ms,实际测得t s =40ms 相对误差为:〔40-30〕/30=33.3% 由于ts 较小,所以读数时误差较大。
K 理论值为1,实验值,相对误差为〔〕/2.28=7%与理论值较为接近(2) 保持T = R f s 不变,分别观测K = 1,2时的输出波形。
K=1时波形即为〔1〕中时波形K=2时,利用matlab 仿真得到如下结果:t s 〔5%〕理论值为300ms,实际测得t s =400ms相对误差为:〔400-300〕/300=33.3% 读数误差较大K 理论值为2,实验值, 相对误差为〔〕/2=5.7%if i o R RU U -=1TS K)s (R )s (C +-=与理论值较为接近。
实验一 典型环节的电路模拟一、实验目的1.熟悉THKKL-5型 控制理论·计算机控制技术实验箱及“THKKL-5”软件的使用; 2.熟悉各典型环节的阶跃响应特性及其电路模拟;3.测量各典型环节的阶跃响应曲线,并了解参数变化对其动态特性的影响。
二、实验设备1.THKKL-5型 控制理论·计算机控制技术实验箱;2.PC 机一台(含“THKKL-5”软件)、USB 数据采集卡、37针通信线1根、16芯数据排线、USB 接口线。
三、实验内容1.设计并组建各典型环节的模拟电路;2.测量各典型环节的阶跃响应,并研究参数变化对其输出响应的影响。
四、实验原理自控系统是由比例、积分、微分、惯性等环节按一定的关系组建而成。
熟悉这些典型环节的结构及其对阶跃输入的响应,将对系统的设计和分析十分有益。
本实验中的典型环节都是以运放为核心元件构成,其原理框图 如图1-1所示。
图中Z 1和Z 2表示由R 、C 构成的复数阻抗。
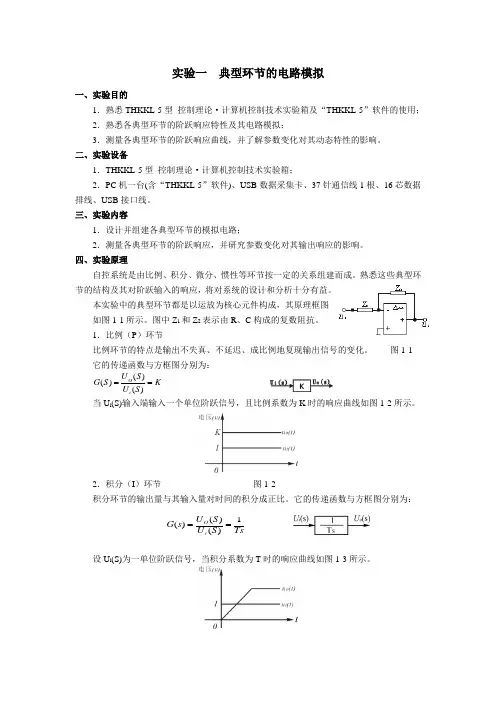
1.比例(P )环节比例环节的特点是输出不失真、不延迟、成比例地复现输出信号的变化。
图1-1 它的传递函数与方框图分别为:KS U S U S G i O ==)()()(当U i (S)输入端输入一个单位阶跃信号,且比例系数为K 时的响应曲线如图1-2所示。
2.积分(I )环节 图1-2积分环节的输出量与其输入量对时间的积分成正比。
它的传递函数与方框图分别为:设U i (S)为一单位阶跃信号,当积分系数为T 时的响应曲线如图1-3所示。
TsS U S Us G i O1)()()(==图1-33.比例积分(PI)环节比例积分环节的传递函数与方框图分别为:)11(11)()()(21211212CSR R R CSR R R CSR CS R S U S U s G i O +=+=+==其中T=R 2C ,K=R 2/R 1设U i (S)为一单位阶跃信号,图1-4示出了比例系数(K)为1、积分系数为T 时的PI 输出响应曲线。
自动控制原理实验报告班级自动化1204姓名焦雍堡学号12212153组员黄寅峰学号:12212124任课老师苗宇实验一经典环节及其阶跃响应1.各个环节的模拟电路图及其阶跃响应曲线(1)比例环节(2)惯性环节(3)积分环节(4)微分环节(5)比例微分环节2.由阶跃响应曲线计算出传递函数(1)惯性环节K=R2/R1=200K/100K=2 T=R2C=0.2G(S)=-2/(0.2S+1)由图可得,输入1000mv的阶跃信号,输出信号稳定在-2000mv 与理论值相符。
(2)积分环节T=RC=0.1G(S)=1/TS=10/s由图可得,R(S)=100/S,C(S)=1000/2S,与理论值相符。
实验二二阶系统阶跃响应1.画出二阶系统的模拟电路图,讨论经典二阶系统性能指标与ξ,nω的关系。
(1)R2=0,ξ=0,nω=10 rad/s(2)R2=50K,ξ=0.25,nω=10 rad/s(3)R2=100K,ξ=0.5,nω=10 rad/s(4)R2=150K,ξ=0.75,nω=10 rad/s(5)R2=200K,ξ=1,nω=10 rad/s(6)R2=400K,ξ=2,nω=10 rad/s(7)ξ=0.5,nω=100 rad/s2.不同ξ,n ω条件下的Mp 和ts 值。
实际测量值: n ωξMpTs (ms )10 rad/s 0 无 无穷 10 rad/s 0.25 41.1% 1098 10 rad/s 0.5 15.9% 665 10 rad/s 0.75 17.3% 333 10 rad/s 1 0 - 10 rad/s 2 0 - 100 rad/s0.515.3%73当ξ=0时,系统处于零阻尼状态,等幅振荡;当0<ξ<1时,系统处于欠阻尼状态,在相同自然角频率的情况下,通过改变ξ可以减小系统的响应时间并减少超调量,且在0.5<ξ<0.75存在最佳阻尼比。
验证性实验实验一典型环节的电路模拟与软件仿真研究一、实验目的1.通过实验熟悉并掌握实验装置和上位机软件的使用方法。
2.通过实验熟悉各种典型环节的传递函数及其特性,掌握电路模拟和软件仿真研究方法。
二、实验内容1.设计各种典型环节的模拟电路。
2.完成各种典型环节模拟电路的阶跃特性测试,并研究参数变化对典型环节阶跃特性的影响。
3.利用上位机界面上的软件仿真功能,完成各典型环节阶跃特性的软件仿真研究,并与电路模拟测试的结果作比较。
三、实验步骤1.熟悉实验箱,利用实验箱上的模拟电路单元,参考本实验附录设计并连接各种典型环节(包括比例、积分、比例积分、比例微分、比例积分微分以及惯性环节)的模拟电路。
注意实验前必须先将实验箱断电,再接线。
接线时要注意不同环节、不同测试信号对运放锁零的要求。
在输入阶跃信号时,除比例环节运放可不锁零(G可接-15V)也可锁零外,其余环节都需要考虑运放锁零。
2.利用实验设备完成各典型环节模拟电路的阶跃特性测试,并研究参数变化对典型环节阶跃特性的影响。
在熟悉上位机界面操作的基础上,充分利用上位机提供的虚拟示波器与信号发生器功能。
为了利用上位机提供的虚拟示波器与信号发生器功能,接线方式将不同于上述无上位机情况。
仍以比例环节为例,此时将Ui连到实验箱 U3单元的O1(D/A通道的输出端),将Uo 连到实验箱 U3单元的I1(A/D通道的输入端),将运放的锁零G连到实验箱 U3单元的G1(与O1同步),并连好U3单元至上位机的并口通信线。
接线完成,经检查无误,再给实验箱上电后,启动上位机程序,进入主界面。
界面上的操作步骤如下:①按通道接线情况完成“通道设置”:在界面左下方“通道设置”框内,“信号发生通道”选择“通道O1#”,“采样通道X”选择“通道I1#”,“采样通道Y”选择“不采集”。
②进行“系统连接”(见界面左下角),如连接正常即可按动态状态框内的提示(在界面正下方)“进入实验模式”;如连接失败,检查并口连线和实验箱电源后再连接,如再失败则请求指导教师帮助。
自动控制理论实验报告姓名罗晋学号201623010505班级电气F1606同组人实验一典型系统的阶跃响应分析一、实验目的1. 熟悉一阶系统、二阶系统的阶跃响应特性及模拟电路;2. 测量一阶系统、二阶系统的阶跃响应曲线,并了解参数变化对其动态特性的影响;3. 掌握系统动态性能的测试方法。
二、实验内容1. 设计并搭建一阶系统、二阶系统的模拟电路;2. 观测一阶系统的阶跃响应,并研究参数变化对其输出响应的影响;σ、3. 观测二阶系统的阻尼比0<ξ<1时的单位阶跃响应曲线;并求取系统的超调量%调节时间t s(Δ= ±0.05);并研究参数变化对其输出响应的影响。
三、实验结果(一)一阶系统阶跃响应研究1. 一阶系统模拟电路如图1-1所示,推导其传递函数G(s)=K/(Ts+1),其中R0=200K。
图1-1 一阶系统模拟电路2. 将阶跃信号发生器的输出端接至系统的输入端。
3. 若K=1、T=1s时,取:R1=100K,R2=100K,C=10uF(K= R2/ R1=1,T=R2C=100K×10uF=1)。
当T=1,光标为起点和终值:光标为起点和0.95的终值:传递函数为:(R2/R1)/(R2CS+1)4 若K=1、T=0.1s时,重复上述步骤(R1=100K,R2=100K,C=1uF(K= R2/ R1=1,T=R2C=100K×1uF=0.1))。
当T=0.1时,光标为起点和终值;光标为起点和0.95终值:6. 保存实验过程中的波形,记录相关的实验数据.,参数变化对系统动态特性的影响分析。
传递函数为:(R2/R1)/(R2CS+1), t=3T ,当T 减小需要达到稳定的时间也会减少,(二)二阶系统阶跃响应研究二阶系统模拟电路如图1-2所示,Rx 阻值可调范围为0~470K 。
图1-2 二阶系统模拟电路传递函数为1. n ω值一定(取10n ω=)时:1.1 当ξ=0.2时,各元件取值:C=1uF ,R=100K , R X =250K (实际操作时可用200k+51k=251k 代替),理论计算系统的%σ,t s (Δ= ±0.05),记录此时系统的阶跃响应曲线(阶跃信号的幅值自定),在曲线上求取系统的%σ,t s (Δ= ±0.05),并与理论值进行比较。
西南交通大学自动控制原理课程实验报告册
《自动控制原理》课程实验报告(一)
《自动控制原理》课程实验报告(二)
《自动控制原理》课程实验报告(三)
《自动控制原理》课程实验报告(四)
三、思考题
1. 参数在一定范围内取值才能使闭环系统稳定的系统称为条件稳定系统。
对于这类系
统可以通过根轨迹法来确定使系统稳定的参数取值范围,也可以适当调整系统参数或增加校正网络以消除条件稳定性问题。
对于下图所示条件稳定系统:
试问能否通过增加开环零极点消除系统条件稳定性问题,即对于所有根轨迹增益,根轨迹全部位于s左半平面,闭环系统稳定。
《自动控制原理》课程实验报告(五)
《自动控制原理》课程实验报告(六)
《自动控制原理》课程实验报告(七)
《自动控制原理》课程实验报告(八)
《自动控制原理》课程实验报告(九)。
自动控制原理实验报告姓名:学号:班级:实验一 一、二阶系统的电子模拟及时域响应的动态测试一、 实验目的1. 了解一、二阶系统阶跃响应及其性能指标与系统参数之间的关系。
2. 学习在电子模拟机上建立典型环节系统模型的方法。
3. 学习阶跃响应的测试方法。
二、 实验内容1. 建立一阶系统的电子模型,观测并记录在不同时间常数T 时的阶跃响应曲线,并测定其过渡过程时间Ts 。
2.建立二阶系统的电子模型,并记录在不同的阻尼比ζ时的阶跃响应曲线,并测定其超调量δ%及过渡过程时间Ts 。
三、 实验原理1.一阶系统系统传递函数为: 模拟运算电路如图1-1所示:图 1-1其中R1=R2,T=R2·C 其中电阻电容的具体取值见表1-12. 二阶系统系统传递函数为: 模拟运算电路如图1-2所示:图1-2其中R2·C1=1,R3·C2=1,R4/R3=ξ21各元器件具体取值如图1-2所示。
222()()()2n n nC s s R s S S ωζωωΦ==++()()()1C s Ks R s TS Φ==+四、实验数据1.一阶系统1)数据表格(取5%误差带,理论上Ts=3T)表1-1T/s 0.25 0.5 1 R2(R1)/Ω250k 500k 1MC/μF 1 1 1Ts实测/s 0.74 1.46 2.99Ts理论/s 0.75 1.5 3 阶跃响应曲线图1-3 图1-4 图1-5 2)响应曲线图1-3 (T=0.25)图1-4 (T=0.5)图1-5 (T=1)2. 二阶系统 1)数据表格表1-2说明:(1)0﹤ζ﹤1,为欠阻尼二阶系统,超调量理论计算公式2/1%100%eπζζσ--=⨯(2)取5%误差带,当ζ值较小(0﹤ζ﹤0.7)采用近似公式 进行估算;当ζ值较大(ζ﹥0.7)采用近似公式 7.145.6-=ξsT 进行估算.2)响应曲线图1-6 (ζ=0.25)ζ0.25 0.5 0.7 1.0 /rad/s 1 1 1 1 R 4/M Ω 2.0 1.0 0.7 0.5 C2/μF 1.0 1.0 1.0 1.0 σ%实测 43.77 16.24 4.00 0.02 σ%理论 44.43 16.30 4.600 Ts 实测/s 13.55 5.47 3.03 4.72 Ts 理论/s 14 7 5 4.75 阶跃响应曲线图1-6图1-7图1-8图1-9ns T ξω5.3=图1-7 (ζ=0.5)图1-8 (ζ=0.7)图1-9 (ζ=1)五、 误差分析1. 对一阶系统阶跃响应实验当T=0.25 时, 1.3%%10075.074.0-75.0=⨯=误差。
自动控制原理实验报告姓 名班 级学 号指导教师1自动控制原理实验报告(一)一.实验目的1.了解掌握各典型环节模拟电路的构成方法、传递函数表达式及输出时域函数表达式。
2.观察分析各典型环节的阶跃响应曲线,了解各项电路参数对典型环节动态特性的影响。
3.了解掌握典型二阶系统模拟电路的构成方法及Ⅰ型二阶闭环系统的传递函数标准式。
4.研究Ⅰ型二阶闭环系统的结构参数--无阻尼振荡频率ωn 、阻尼比ξ对过渡过程的影响。
5.掌握欠阻尼Ⅰ型二阶闭环系统在阶跃信号输入时的动态性能指标σ%、t p 、t s 的计算。
6.观察和分析Ⅰ型二阶闭环系统在欠阻尼、临界阻尼、过阻尼的瞬态响应曲线,及在阶跃信号输入时的动态性能指标σ%、t p 值,并与理论计算值作比对。
二.实验过程与结果1.观察比例环节的阶跃响应曲线1.1模拟电路图1.2传递函数(s)G(s)()o i U K U s == 10R K R =1.3单位阶跃响应U(t)K 1.4实验结果1.5实验截图2342.观察惯性环节的阶跃响应曲线2.1模拟电路图2.2传递函数(s)G(s)()1o i U KU s TS ==+10R K R =1T R C =2.3单位阶跃响应0(t)K(1e)tTU-=-2.4实验结果2.5 实验截图5673.观察积分环节的阶跃响应曲线3.1模拟电路图3.2传递函数(s)1G(s)()TS o i U U s ==i 0T =R C3.3单位阶跃响应01(t)i U t T =3.4 实验结果3.5 实验截图89104.观察比例积分环节的阶跃响应曲线4.1模拟电路图4.2传递函数0(s)1(s)(1)(s)i i U G K U T S ==+10K R R =1i T R C=4.3单位阶跃响应1 (t)(1)U K tT=+ 4.4实验结果4.5实验截图1112135.观察比例微分环节的阶跃响应曲线5.1模拟电路图5.2传递函数0(s)1(s)()(s)1i U TSG K U S τ+==+12312(R )D R R T CR R =++3R C τ=120R R K R +=141233(R //R )R D K R +=0.06D D T K sτ=⨯=5.3单位阶跃响应0(t)()U KT t Kδ=+5.4实验结果截图6.观察比例积分微分(PID )环节的响应曲线6.1模拟电路图156.2传递函数0(s)(s)(s)p p p d i i K U G K K T S U T S ==++123212(R )C d R R T R R =++i 121(R R )C T =+120p R R K R +=1233(R //R )R D K R +=32R C τ= D D T K τ=⨯6.3单位阶跃响应0(t)()p p D p K U K T t K tTδ=++6.4实验观察结果截图16三.实验心得这个实验,收获最多的一点:就是合作。
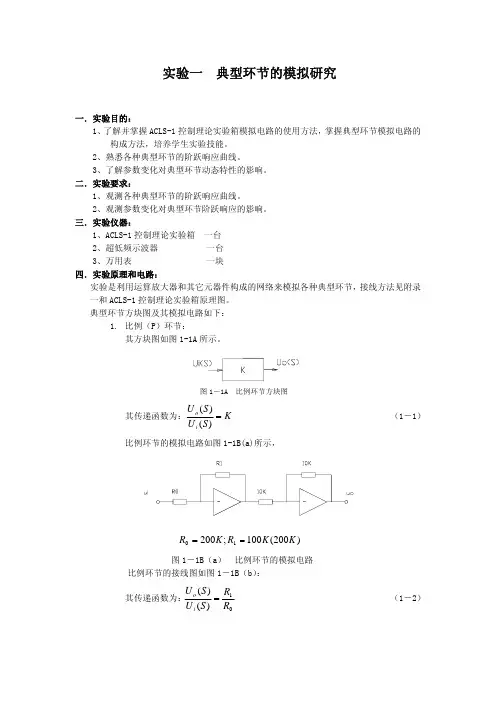
实验一 典型环节的模拟研究一.实验目的:1、了解并掌握ACLS-1控制理论实验箱模拟电路的使用方法,掌握典型环节模拟电路的构成方法,培养学生实验技能。
2、熟悉各种典型环节的阶跃响应曲线。
3、了解参数变化对典型环节动态特性的影响。
二.实验要求:1、观测各种典型环节的阶跃响应曲线。
2、观测参数变化对典型环节阶跃响应的影响。
三.实验仪器:1、ACLS-1控制理论实验箱 一台2、超低频示波器 一台3、万用表 一块四.实验原理和电路:实验是利用运算放大器和其它元器件构成的网络来模拟各种典型环节,接线方法见附录一和ACLS-1控制理论实验箱原理图。
典型环节方块图及其模拟电路如下:1.比例(P)环节:i当输入为单位阶跃信号,即)(1)(t t U i =时,SS U i 1)(=。
则由式(1-1) 得到:SK S U o 1)(•=其传递函数为:TSS U S U i o 1)()(= (1-5)积分环节的模拟电路如图1-2B 所示。
积分环节接线图:把图1-1B(b)中的R1换为C 即可。
积分环节模拟电路的传递函数为:CSR S U S U i o 01)()(= (1-6)比较式(1-5)和(1-6)得: C R T 0= (1-7) 当输入为单位阶跃信号,即)(1)(t t U i =时,SS U i 1)(=。
则由式(1-5) 得到:2111)(TS S TS S U o =•=比例积分环节的模拟电路如图1-3B 所示。
比例-积分环节接线图:把图1-1B(b)中的R1换成R1和C 串联即可。
其传递函数为:CSR R R CS R CS R S U S U i o 0010111)()(+=+= (1-10)比较式(1-9)和(1-10)得:当输入为单位阶跃信号,即)(1)(t t U i =时,SS U i 1)(=。
则由式(1-9) 得到:STS K S U o 1)1()(•+=惯性环节的接线图:把图1-1B(b)中的R1换成R1和C 并联即可。
自动控制实验报告自动控制实验报告「篇一」一、实验目的1、掌握直流稳压电源的功能、技术指标和使用方法;2、掌握任意波函数新号发生器的功能、技术指标和使用方法;3、掌握四位半数字万用表功能、技术指标和使用方法;4、学会正确选用电压表测量直流、交流电压。
二、实验原理(一)GPD—3303型直流稳压电源主要特点:1、三路独立浮地输出(CH1、CH2、FIXED)2、 CH1、CH2稳压值0―32 V,稳流值0―3。
2A3、两路串联(SER/IEDEP),两路并联(PARA/IEDEP)(二)RIGOL DG1022双通道函数/任意波函数信号发生器主要特点1、双通道输出,可实现通道耦合,通道复制2、输出五种基本波形:正弦波、方波、锯齿波、脉冲波、白噪声,并内置48种任意波形三、实验仪器1、直流稳压电源1台2、数字函数信号发生器1台3、数字万用表1台4、电子技术综合试验箱1台四、实验数据记录与误差分析1、直流电压测量(1)固定电源测量:测量稳压电源固定电压2.5V、3.3V、5V;误差分析:E1=|2.507—2.5|÷2。
5×100%=0.28%E2=|3.318—3。
3|÷3.3×100%=0.55%E3=|5.039—5|÷5×100%=0.78%(2)固定电源测量:测量实验箱的固定电压±5V、±12V、—8V;误差分析:E1=|5.029—5|÷5×100%=0.58%E2=|5.042—5|÷5×100%=0.84%E3=|11.933—12|÷12×100%=0.93%E3=|11.857—12|÷12×100%=0.56%E3=|8.202—8|÷8×100%=2.5%(3)可变电源测量;误差分析:E1=|6.016—6|÷6×100%=0.27%E2=|12.117—12|÷12×100%=0.98% E3=|18.093—18|÷18×100%=0.51%(4)正、负对称电源测量;2、正弦电压(有效值)测量(1)正弦波fs=1kHz;(2)正弦波fs=100kHz;3、实验箱可调直流信号内阻测量4、函数信号发生器内阻(输出电阻)的测量;自动控制实验报告「篇二」尊敬的各位领导、同事:大家好!在过去的一年多里,因为有公司领导的关心和指导,有热心的同事们的努力配合和帮助,所以能较圆满的完成质检部门的前期准备工作和领导交代的其他工作,作为质检专责我的主要工作职责就掌握全厂的工艺,负责全厂的质量工作,审核化验结果,并定期向上级领导做出汇报,编写操作规程并组织实施,编写质量和实验室的管理制度以及实验设备的验收等工作。
一、实验目的1. 熟悉并掌握自动控制实验系统的基本操作方法。
2. 了解典型线性环节的时域响应特性。
3. 掌握自动控制系统的校正方法,提高系统性能。
二、实验设备1. 自动控制实验系统:包括计算机、XMN-2自动控制原理模拟实验箱、CAE-PCI软件、万用表等。
2. 电源:直流稳压电源、交流电源等。
三、实验原理自动控制实验系统主要由模拟实验箱和计算机组成。
通过模拟实验箱,可以搭建不同的自动控制系统,并通过计算机进行实时数据采集、分析、处理和仿真。
四、实验内容及步骤1. 搭建比例环节实验(1)根据实验要求,搭建比例环节实验电路。
(2)设置输入信号,观察并记录输出信号。
(3)分析比例环节的时域响应特性。
2. 搭建积分环节实验(1)根据实验要求,搭建积分环节实验电路。
(2)设置输入信号,观察并记录输出信号。
(3)分析积分环节的时域响应特性。
3. 搭建比例积分环节实验(1)根据实验要求,搭建比例积分环节实验电路。
(2)设置输入信号,观察并记录输出信号。
(3)分析比例积分环节的时域响应特性。
4. 搭建系统校正实验(1)根据实验要求,搭建系统校正实验电路。
(2)设置输入信号,观察并记录输出信号。
(3)分析系统校正前后的时域响应特性。
五、实验结果与分析1. 比例环节实验结果实验结果显示,比例环节的输出信号与输入信号成正比关系,且响应速度较快。
2. 积分环节实验结果实验结果显示,积分环节的输出信号与输入信号成积分关系,且响应速度较慢。
3. 比例积分环节实验结果实验结果显示,比例积分环节的输出信号既具有比例环节的快速响应特性,又具有积分环节的缓慢响应特性。
4. 系统校正实验结果实验结果显示,通过校正后的系统,其响应速度和稳态误差均有所提高。
六、实验结论1. 通过本次实验,掌握了自动控制实验系统的基本操作方法。
2. 熟悉了典型线性环节的时域响应特性。
3. 学会了自动控制系统的校正方法,提高了系统性能。
七、实验感想本次实验让我深刻认识到自动控制理论在实际工程中的应用价值。
自动控制原理实验——第一次实验姓名:乔佳楠班级:06110901学号:20091419一、实验目的了解MATLAB在自动控制原理课程中的应用,学习MATLAB的基本使用方法。
通过上机实验操作学习线性系统的分析与设计,学习传递函数的描述方法,自控系统结构框图的模型表示以及线性系统的时域分析。
其中本节重点掌握结构框图中的串联,并联和反馈结构的模型表示方法,并能正确分析不同结构模型之间的关系。
二、实验要求运用MATLAB软件解决下列三个问题,并绘制出每个函数的单位阶跃响应图像,标出其上升时间,过渡过程时间,计算出超调量。
三、实验内容1.给出下列两个函数,分别求出在串联,并联和反馈结构中的系统传递函数,并画出阶跃响应曲线,标出上升时间,过渡过程时间以及超调量。
①G1=tf(10,[1,2,3]) ②G2=tf(1,[1,2])Step1:串联结构,即G=G1*G2>> G1=tf(10,[1,2,3]);>> G2=tf(1,[1,2]);>> G=series(G1,G2)Transfer function:10---------------------s^3 + 4 s^2 + 7 s + 6>> step(G)起调量:(1.77-1.66)/1.66*100%=6.63% 上升时间: 2.97 sec过渡过程时间:5.89 secStep2:并联结构,即G=G1+G2>> G1=tf(10,[1,2,3]);>> G2=tf(1,[1,2]);>> G=parallel(G1,G2)Transfer function:s^2 + 12 s + 23---------------------s^3 + 4 s^2 + 7 s + 6>> step(G)起调量:(4.19-3.83)/3.83*100%=9.40% 上升时间: 2.23 sec过渡过程时间:5.78 secStep3:反馈结构,即G=G1/(1+G1G2)>> G1=tf(10,[1,2,3]);>> G2=tf(1,[1,2]);>> G=feedback(G1,G2,-1)Transfer function:10 s + 20----------------------s^3 + 4 s^2 + 7 s + 16 >> step(G)起调量:(2.25-1.25)/1.25*100%=80.0%上升时间: 1.29 sec过渡过程时间:16.7 sec2.根据系统的结构框图,求出系统总的传递函数。
自动控制原理实验实验1 控制系统典型环节的模拟利用运算放大器的基本特性,如:开环增益高,输入阻抗大、输出阻抗小等,通过设置不同的反馈网络,可以模拟各种典型环节。
一.实验目的● 掌握用运算放大器组成控制系统典型环节的电子电路原理。
●观察几种典型环节的阶跃响应曲线。
● 了解参数变化对典型环节输出动态性能(即阶跃响应)的影响。
二.实验仪器●THSCC-1实验箱一台。
● 示波器一台。
三.实验内容 1.比例环节比例(P )环节的方框图如图1-1所示。
图1-1比例环节方框图K Z Z S u S u S G i o ==-=12)()()(当输入为单位阶跃信号,即u i =-1V 时,u i (s )=s 1,则u o (s )=K s1,所以输出响应为:u o (t )=K (t ≥0)。
比例环节实验原理图如图1-2所示。
选择:K=R2/R1=2,例如选择R2=820k ,R1=410k ,或选择R2=100k ,R1=51k 。
R2图1-2 比例环节实验原理图和输出波形实验步骤: (1)调整示波器: ● 选择输入通道CH1或CH2。
● 逆时针调节示波器的时间旋钮“TIME/DIV ”到底,使光标为一点,并调节上下“位移”旋钮使光标位于0线上。
●调整示波器的输入幅度档位选择开关,选择合适的档位使信号幅度便于观察,例如选择档位为1V 档。
● 将输入幅度档位选择开关中心的微调旋钮顺时针旋到底。
● 将信号选择开关打到DC 档。
(2)顺时针调节实验箱的旋钮,使阶跃信号为负(绿灯亮)。
(3)阶跃信号接到示波器上,调节实验箱的幅度旋钮。
使负跳变幅度为一格(即Ui=-1V )。
(4)接好实验线路,按下阶跃信号按钮,观察示波器的波形。
预习思考:输出幅度跳变应为……? 2.惯性环节惯性环节实验原理图如图1-3所示。
其传递函数为:11)()()(+==TS K s u s u S G i o , K= R2/R1,T=R2*C 当输入为单位阶跃信号,即u i (t )=-1V 时,u i (s )=S 1,则u o (s )=S11TS 1⋅+ 所以输出响应为u o (t )=)e1(K Tt--。
分组:成绩:_________北京航空航天大学自动控制原理实验报告实验一一、二阶系统的电子模拟及时域响应的动态测试学院专业方向班级学号学生姓名指导教师2014年11月目录一、实验目的 (1)二、实验内容 (1)三、实验原理 (1)四、实验设备 (2)五、实验步骤 (2)六、实验数据 (3)1.一阶系统实验数据及图形 (3)2.二阶系统实验数据及图形 (4)七、结论和误差分析 (7)结论: (7)误差分析: (7)八、收获与体会 (7)附录 (8)实验时间2014.11.1 同组同学无一、实验目的1.了解一、二阶系统阶跃响应及其性能指标与系统参数之间的关系。
2.学习在电子模拟机上建立典型环节系统模型的方法。
3.学习阶跃响应的测试方法。
二、实验内容1.建立一阶系统的电子模型,观测并记录在不同时间常数T时的阶跃响应曲线,并测定其过渡过程时间Ts。
2.建立二阶系统的电子模型,观测并记录在不同阻尼比ζ时的阶跃响应曲线,并测定其超调量σ%及过渡过程时间Ts。
三、实验原理1.一阶系统实验原理C(S) K(s)TS1R(S)系统传递函数为:模拟运算电路如图1所示:图1R2Uo(s)=R=K1Ui(s) CSR2+1Ts+1在实验中始终取R2=R1,则K=1,T=R2*C1/ 10记录不同的时间常数下阶跃响应曲线,测量并记录其过渡时间 Ts (Ts=3T )2.二阶系统实验原理 其传递函数为:C(S) 2n (S)2 n S n 2)R(S)(S 2令n1弧度/秒,二阶系统模拟线路下图2所示:图2取R2*C1=1,R3*C2=1,则R4/R3=R4*C2=1/(2*) 及 ( 2*R4*C2 )=1/t s3(0.05),%e 12理论值:n100%四、实验设备1. HHMN-1型电子模拟机一台2. PC 机一台3. 数字式万用表一块。
五、实验步骤1.熟悉XMN-2型电子模拟机的使用方法。
2.将各运算放大器接成比例器,通电调零。
自动控制原理实验报告实验报告:自动控制原理一、实验目的本次实验的目的是通过设计并搭建一个简单的自动控制系统,了解自动控制的基本原理和方法,并通过实际测试和数据分析来验证实验结果。
二、实验装置和仪器1. Arduino UNO开发板2.电机驱动模块3.直流电机4.旋转角度传感器5.杜邦线6.电源适配器三、实验原理四、实验步骤1. 将Arduino UNO开发板与电机驱动模块、旋转角度传感器和直流电机进行连接。
2. 编写Arduino代码,设置电机的控制逻辑和旋转角度的反馈机制。
3. 将编写好的代码上传至Arduino UNO开发板。
4.将电源适配器连接至系统,确保实验装置正常供电。
5.启动实验系统并观察电机的转动情况。
6.记录电机的转动角度和实际目标角度的差异,并进行数据分析。
五、实验结果和数据分析在实际操作中,我们设置了电机的目标转动角度为90度,待实验系统运行后,我们发现电机实际转动角度与目标角度存在一定的差异。
通过对数据的分析,我们发现该差异主要由以下几个方面导致:1.电机驱动模块的响应速度存在一定的延迟,导致电机在到达目标角度时出现一定的误差。
2.旋转角度传感器的精度有限,无法完全准确地测量电机的实际转动角度。
这也是导致实际转动角度与目标角度存在差异的一个重要原因。
3.电源适配器的稳定性对电机的转动精度也有一定的影响。
六、实验总结通过本次实验,我们了解了自动控制的基本原理和方法,并通过实际测试和数据分析了解了自动控制系统的运行情况。
同时,我们也发现了实际系统与理论预期之间存在的一些差异,这些差异主要由电机驱动模块和旋转角度传感器等因素引起。
为了提高自动控制系统的精度,我们需要不断优化和改进这些因素,并进行相应的校准和调试。
实验的结果也提醒我们,在实际应用中,需要考虑各种因素的影响,以确保自动控制系统的可靠性和准确性。