机械精度设计基础及应用习题
- 格式:doc
- 大小:738.00 KB
- 文档页数:15
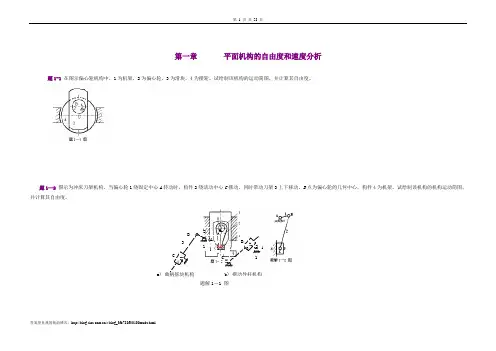
第一章平面机构的自由度和速度分析题1-1在图示偏心轮机构中,1为机架,2为偏心轮,3为滑块,4为摆轮。
试绘制该机构的运动简图,并计算其自由度。
题1—2图示为冲床刀架机构,当偏心轮1绕固定中心A转动时,构件2绕活动中心C摆动,同时带动刀架3上下移动。
B点为偏心轮的几何中心,构件4为机架。
试绘制该机构的机构运动简图,并计算其自由度。
题1—3计算题1-3图a)与图b)所示机构的自由度(若有复合铰链,局部自由度或虚约束应明确指出)。
题1-3图a)题1-3图b)题1—4计算题1—4图a、图b所示机构的自由度(若有复合铰链,局部自由度或虚约束应明确指出),并判断机构的运动是否确定,图中画有箭头的构件为原动件。
题1—5 计算题1—5图所示机构的自由度(若有复合铰链,局部自由度或虚约束应明确指出),并标出原动件。
题1—5图 题解1—5图题1-6 求出图示的各四杆机构在图示位置时的全部瞬心。
第二章 连杆机构题2-1在图示铰链四杆机构中,已知 l BC =100mm ,l CD =70mm ,l AD =60mm ,AD 为机架。
试问:(1)若此机构为曲柄摇杆机构,且AB 为曲柄,求l AB 的最大值;(2)若此机构为双曲柄机构,求l AB 最小值; (3)若此机构为双摇杆机构,求l AB 的取值范围。
题2-2 如图所示的曲柄滑块机构: (1)曲柄为主动件,滑块朝右运动为工作 行程,试确定曲柄的合理转向,并简述其理由;(2)当曲柄为主动件时,画出极位夹角θ,最小传动角g min ; (3)设滑块为主动件,试用作图法确定该机构的死点位置 。
D题2-1图题2-3图示为偏置曲柄滑块机构,当以曲柄为原动件时,在图中标出传动角的位置,并给出机构传动角的表达式,分析机构的各参数对最小传动角的影响。
题2-4设计一曲柄摇杆机构,已知机构的摇杆DC长度为150mm,摇杆的两极限位置的夹角为45°,行程速比系数K=1.5,机架长度取90mm。
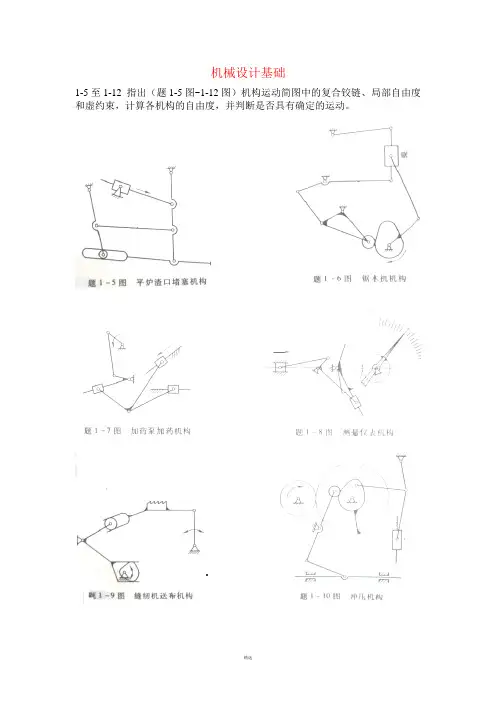
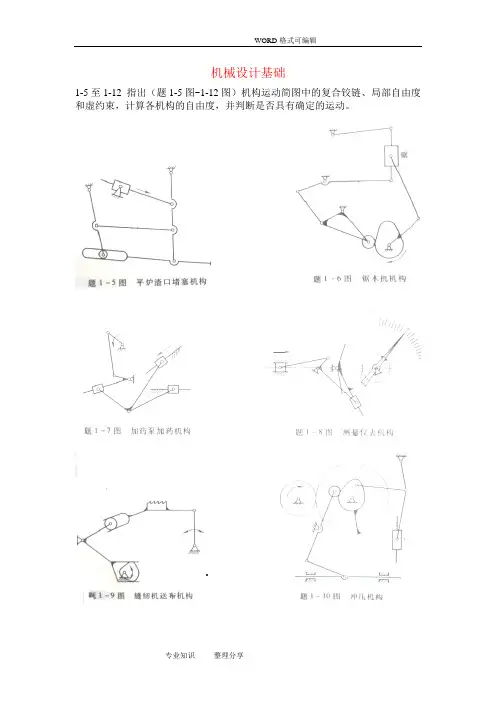
机械设计基础1-5至1-12 指出(题1-5图~1-12图)机构运动简图中的复合铰链、局部自由度和虚约束,计算各机构的自由度,并判断是否具有确定的运动。
1-5 解 F =H L P P n --23=18263-⨯-⨯=11-6 解F =H L P P n --23=111283-⨯-⨯=11-7 解F =H L P P n --23=011283-⨯-⨯=21-8 解F =H L P P n --23=18263-⨯-⨯=11-9 解F =H L P P n --23=24243-⨯-⨯=21-10 解F =H L P P n --23=212293-⨯-⨯=11-11 解F =H L P P n --23=24243-⨯-⨯=21-12 解F =H L P P n --23=03233-⨯-⨯=32-1 试根据题2-1图所标注的尺寸判断下列铰链四杆机构是曲柄摇杆机构、双曲柄机构还是双摇杆机构。
题2-1图答 : a )160907015011040=+<=+,且最短杆为机架,因此是双曲柄机构。
b )1707010016512045=+<=+,且最短杆的邻边为机架,因此是曲柄摇杆机构。
c )132627016010060=+>=+,不满足杆长条件,因此是双摇杆机构。
d )1909010015010050=+<=+,且最短杆的对边为机架,因此是双摇杆机构。
2-3 画出题2-3图所示个机构的传动角和压力角。
图中标注箭头的构件为原动件。
题2-3图解:2-5 设计一脚踏轧棉机的曲柄摇杆机构,如题2-5图所示,要求踏板CD 在水平位置上下各摆10度,且500CD l mm =,1000AD l mm =。
(1)试用图解法求曲柄AB 和连杆BC 的长度;(2)用式(2-6)和式(2-6)’计算此机构的最小传动角。
题2-5图解 : ( 1 )由题意踏板CD 在水平位置上下摆动ο10,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。
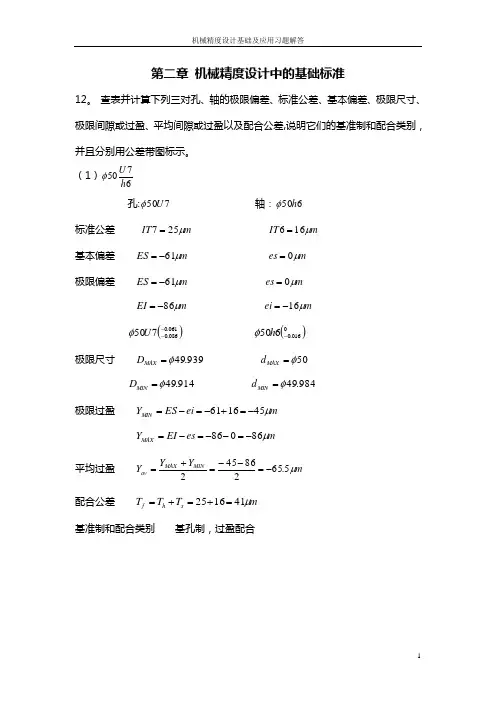
第二章 机械精度设计中的基础标准12。
查表并计算下列三对孔、轴的极限偏差、标准公差、基本偏差、极限尺寸、极限间隙或过盈、平均间隙或过盈以及配合公差,说明它们的基准制和配合类别,并且分别用公差带图标示。
(1)6750h U φ 孔:750U φ 轴:650h φ 标准公差 m IT μ257= m IT μ166= 基本偏差 m ES μ61-=m es μ0=极限偏差 m ES μ61-= m es μ0= m EI μ86-= m ei μ16-=()061.0086.0750--U φ ()0016.0650-h φ极限尺寸 939.49φ=MAX D 50φ=MAX d914.49φ=MIN D 984.49φ=MIN d极限过盈 m ei ES Y MIN μ451661-=+-=-= m es EI Y MAX μ86086-=--=-= 平均过盈 m Y Y Y MIN MAX av μ5.65286452-=--=+=配合公差 m T T T s h f μ411625=+=+= 基准制和配合类别 基孔制,过盈配合(2)6745n H φ 孔:745H φ 轴:645n φ标准公差 m IT μ257=m IT μ166= 基本偏差 m EI μ0=m ei μ17+=极限偏差 m ES μ25+= m es μ33+= m EI μ0= m ei μ17+=()025.00745+H φ ()033.0017.0645++n φ极限尺寸 025.45φ=MAX D 033.45φ=MAX d45φ=MIN D 0017.45φ=MIN d极限过盈 m ei ES X MAX μ81725+=-=-= 或过盈 m es EI Y MAX μ33330-=-=-= 平均过盈 m Y X Y MAX MAX av μ5.1223382-=-+=+=配合公差 m T T T s h f μ411625=+=+= 基准制和配合类别 基孔制,过渡配合(3)6740h G φ 孔:740G φ 轴:640h φ 标准公差 m IT μ257=m IT μ166=基本偏差 m EI μ9+=m es μ0=极限偏差 m ES μ34+= m es μ0= m EI μ9+= m ei μ16-=()034.0009.0740++G φ ()0016.0640-h φ极限尺寸 034.40φ=MAX D 40φ=MAX d009.40φ=MIN D 984.39φ=MIN d极限间隙 m ei ES X MAX μ501634+=+=-= m es EI X MIN μ909+=-=-= 平均间隙 m X X X MIN MAX av μ5.2929502+=+=+=配合公差 m T T T s h f μ411625=+=+= 基准制和配合类别 基轴制,间隙配合15 下列配合中,它们分别属于哪种基准制的配合和哪类配合,并确定孔和轴的最大间隙或最小过盈,最小间隙和最大过盈。
16-1解由手册查得6005 深沟球轴承,窄宽度,特轻系列,内径,普通精度等级(0级)。
主要承受径向载荷,也可承受一定的轴向载荷;可用于高速传动。
N209/P6 圆柱滚子轴承,窄宽度,轻系列,内径,6级精度。
只能承受径向载荷,适用于支承刚度大而轴承孔又能保证严格对中的场合,其径向尺寸轻紧凑。
7207CJ 角接触球轴承,窄宽度,轻系列,内径,接触角,钢板冲压保持架,普通精度等级。
既可承受径向载荷,又可承受轴向载荷,适用于高速无冲击, 一般成对使用,对称布置。
30209/P5 圆锥滚子轴承,窄宽度,轻系列,内径,5级精度。
能同时承受径向载荷和轴向载荷。
适用于刚性大和轴承孔能严格对中之处,成对使用,对称布置。
16-2解室温下工作;载荷平稳,球轴承查教材附表 1,( 1)当量动载荷时在此载荷上,该轴承能达到或超过此寿命的概率是 90%。
( 2)当量动载荷时16-3解室温下工作;载荷平稳,球轴承当量动载荷查教材附表1,可选用轴承6207(基本额定动载荷)。
16-4解(1)计算当量动载荷查手册, 6313的,,查教材表16-12,并插值可得,所以,当量动载荷( 2)计算所需基本额定动载荷查教材表 16-9,室温下工作;查教材表16-10有轻微冲击,球轴承因所需的,所以该轴承合适。
16-5解选择轴承型号查教材表 16-9,工作温度125℃时,;载荷平稳,选用球轴承时,查教材附表 1,根据和轴颈,可选用球轴承6408(基本额定动载荷). 选用滚子轴承时,查教材附表 1,根据和轴颈,可选用圆柱滚子轴承N208(基本额定动载荷( 2)滚子轴承的载承能力较大,并查手册可知其径向尺寸小。
16-6解( 1)按题意,外加轴向力已接近,暂选的角接触轴承类型70000AC。
( 2)计算轴承的轴向载荷 (解图见16.4b) 由教材表 16-13查得,轴承的内部派生轴向力,方向向左,方向向右因轴承 1被压紧轴承 2被放松( 3)计算当量动载荷查教材表 16-12,,查表16-12得,查表16-12得,( 3)计算所需的基本额定动载荷查教材表 16-9,常温下工作,;查教材表16-10,有中等冲击,取;球轴承时,;并取轴承1的当量动载荷为计算依据查手册,根据和轴颈,选用角接触球轴承7308AC合适(基本额定动载荷16-7 根据工作要求,选用内径的圆柱滚子轴承。
机械设计基础1-5至1-12 指出(题1-5图~1-12图)机构运动简图中的复合铰链、局部自由度和虚约束,计算各机构的自由度,并判断是否具有确定的运动。
1-5 解 F =H L P P n --23=18263-⨯-⨯=11-6 解F =H L P P n --23=111283-⨯-⨯=11-7 解F =H L P P n --23=011283-⨯-⨯=21-8 解F =H L P P n --23=18263-⨯-⨯=11-9 解F =H L P P n --23=24243-⨯-⨯=21-10 解F =H L P P n --23=212293-⨯-⨯=11-11 解F =H L P P n --23=24243-⨯-⨯=21-12 解F =H L P P n --23=03233-⨯-⨯=32-1 试根据题2-1图所标注的尺寸判断下列铰链四杆机构是曲柄摇杆机构、双曲柄机构还是双摇杆机构。
题2-1图答 : a )160907015011040=+<=+,且最短杆为机架,因此是双曲柄机构。
b )1707010016512045=+<=+,且最短杆的邻边为机架,因此是曲柄摇杆机构。
c )132627016010060=+>=+,不满足杆长条件,因此是双摇杆机构。
d )1909010015010050=+<=+,且最短杆的对边为机架,因此是双摇杆机构。
2-3 画出题2-3图所示个机构的传动角和压力角。
图中标注箭头的构件为原动件。
题2-3图解:2-5 设计一脚踏轧棉机的曲柄摇杆机构,如题2-5图所示,要求踏板CD 在水平位置上下各摆10度,且500CD l mm =,1000AD l mm =。
(1)试用图解法求曲柄AB 和连杆BC 的长度;(2)用式(2-6)和式(2-6)’计算此机构的最小传动角。
题2-5图解 : ( 1 )由题意踏板CD 在水平位置上下摆动 10,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。
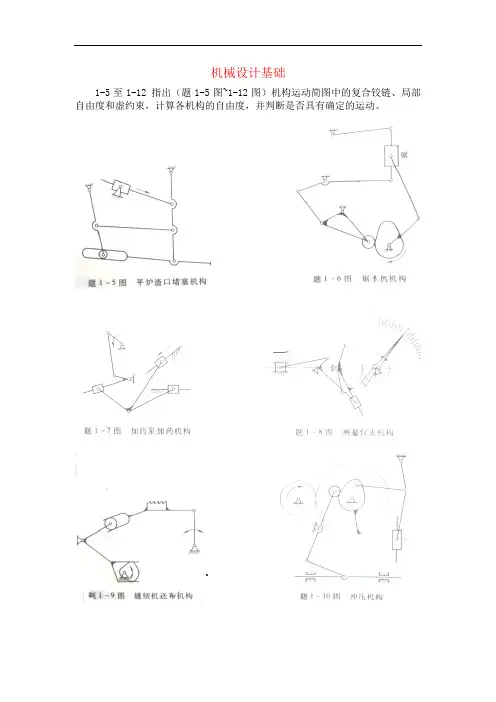
机械设计基础1-5至1-12 指出(题1-5图~1-12图)机构运动简图中的复合铰链、局部自由度和虚约束,计算各机构的自由度,并判断是否具有确定的运动。
1-5 解 F =H L P P n --23=18263-⨯-⨯=11-6 解F =H L P P n --23=111283-⨯-⨯=11-7 解F =H L P P n --23=011283-⨯-⨯=21-8 解F =H L P P n --23=18263-⨯-⨯=11-9 解F =H L P P n --23=24243-⨯-⨯=21-10 解F =H L P P n --23=212293-⨯-⨯=11-11 解F =H L P P n --23=24243-⨯-⨯=21-12 解F =H L P P n --23=03233-⨯-⨯=32-1 试根据题2-1图所标注的尺寸判断下列铰链四杆机构是曲柄摇杆机构、双曲柄机构还是双摇杆机构。
题2-1图答 : a )160907015011040=+<=+,且最短杆为机架,因此是双曲柄机构。
b )1707010016512045=+<=+,且最短杆的邻边为机架,因此是曲柄摇杆机构。
c )132627016010060=+>=+,不满足杆长条件,因此是双摇杆机构。
d )1909010015010050=+<=+,且最短杆的对边为机架,因此是双摇杆机构。
2-3 画出题2-3图所示个机构的传动角和压力角。
图中标注箭头的构件为原动件。
题2-3图解:2-5 设计一脚踏轧棉机的曲柄摇杆机构,如题2-5图所示,要求踏板CD 在水平位置上下各摆10度,且500CD l mm =,1000AD l mm =。
(1)试用图解法求曲柄AB 和连杆BC 的长度;(2)用式(2-6)和式(2-6)’计算此机构的最小传动角。
题2-5图解 : ( 1 )由题意踏板CD 在水平位置上下摆动 10,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。

机械精度设计基础习题答案【篇一:机械精度试题(答案版)】工误差控制在给定的范围内。
( √ )8、圆柱度公差是控制圆柱形零件横截面和轴向截面内形状误差的综合性指标。
( √ )13、配合公差的数值愈小,则相互配合的孔、轴的公差等级愈高。
( √ )14、一般来说,需要严格保证配合性质时,应采用包容要求。
( √ )18.对一被测值进行大量重复测量时其产生的随机误差完全服从正态分布规律。
( √ )19.若某平面对基准的垂直度误差为0.05mm,则该平面的平面度误差一定小于等于0.05mm.。
它是符合要求的。
( √ )27.选用优先数列时,应按照先疏后密的规则进行选取,以避免规格过多。
( √ )29.对一被测值进行大量重复测量时其产生的随机误差完全服从正态分布规律。
( √ )31.汽车发动机曲轴和凸轮轴上的正时齿轮,车床主轴与丝杠之间的交换齿轮,主要要保证其传动的准确性。
( √ ) 36.若被测要素相对于基准的方向和位置关系以理论正确尺寸标注,则其公差带的方向和位置是固定的。
( √ ) 37.量块按“级”使用时,应以其标称值作为工作尺寸,该尺寸包含了量块的制造误差1、?30g6与?30g7两者的区别在于( c)c.上偏差相同,而下偏差不同2、一般配合尺寸的公差等级范围为( c) c.it5~it133、当相配孔、轴既要求对准中心,又要求装拆方便时,应选用( c) c.过渡配合4、形位公差带的形状决定于( d) d.被测要素的理想形状、形位公差特征项目和标注形式b.圆形或圆柱形6、下列四组配合中配合性质与?40h7/k6相同的一组是( c )C、?40k7/h67、用功能量规控制形状误差大小的方法适用于( b )b、生产现场8、下列四个形位公差特征项目中公差带形状与径向全跳动公差带形状相同的那个公差项目是( b )b、圆柱度9、用立式光学比较仪测量?25m6轴的方法属于( b ) b、相对测量10、利用同一种加工方法,加工?50h6孔和?100h7孔,应理解为( a )A、前者加工困难11、下列说法不正确的有( c ) c、用于高速传动的齿轮,一般要求载荷分布均匀;12、测量与被测几何量有一定函数关系的几何量,然后通过函数关系式运算,获得该被测几何量的量值的方法,称为( d ) d、间接测量法13、某阶梯轴上的实际被测轴线各点距基准轴线的距离最近为2 ?m,最远为4 ?m,则同轴度误差值为( c ) C、?8?m14、一般来说,下列哪一个表面粗糙度要求最高。
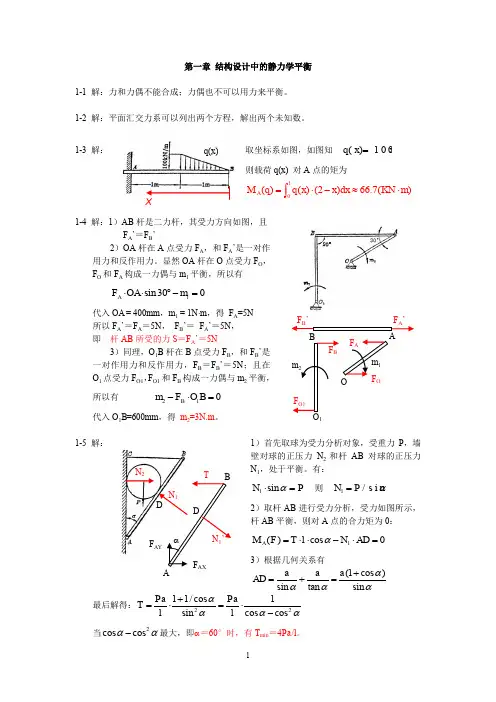
第一章 结构设计中的静力学平衡1-1 解:力和力偶不能合成;力偶也不可以用力来平衡。
1-2 解:平面汇交力系可以列出两个方程,解出两个未知数。
取坐标系如图,如图知 ()100q x x = 1-3 解:则载荷q(x) 对A 点的矩为1()()(2)66.7()A M q q x x dx KN m =⋅-≈⋅⎰1-4 解:1)AB 杆是二力杆,其受力方向如图,且 F A ’=F B ’2)OA 杆在A 点受力F A ,和F A ’是一对作用力和反作用力。
显然OA 杆在O 点受力F O ,F O 和F A 构成一力偶与m 1平衡,所以有 1sin300A F OA m ⋅⋅︒-=代入OA = 400mm ,m 1 = 1N ⋅m ,得 F A =5N 所以F A ’=F A =5N , F B ’= F A ’=5N ,即 杆AB 所受的力S =F A ’=5N3)同理,O 1B 杆在B 点受力F B ,和F B ’是一对作用力和反作用力,F B =F B ’=5N ;且在O 1点受力F O1,F O1和F B 构成一力偶与m 2平衡,所以有 210B m F O B -⋅= 代入O 1B =600mm ,得 m 2=3N.m 。
1-5 解:1)首先取球为受力分析对象,受重力P ,墙 壁对球的正压力N 2和杆AB 对球的正压力N 1,处于平衡。
有:1sin N P α⋅= 则 1/s i n N P α=2)取杆AB 进行受力分析,受力如图所示, 杆AB 平衡,则对A 点的合力矩为0: 1()cos 0A M F T l N AD α=⋅⋅-⋅=3)根据几何关系有(1cos )sin tan sin a a a AD αααα+=+=最后解得:2211/cos 1sin cos cos Pa Pa T l l αααα+=⋅=⋅- 当2cos cosαα-最大,即α=60°时,有T min =4Pa/l 。
第六章 机械精度检测技术内容概要:在介绍基本检测原则和常用检测仪器的基础上,论述了各典型参数和零件的测量方法,以及新技术在检测中的应用。
教学要求:学会根据不同精度要求合理选择测量器具和测量方法,能运用最基本的检测原则和方法对各典型参数和零件进行测量,并通过实验教学使学生对精度检测技术能力得到一定的训练。
学习重点:检测的基本原则、孔轴的检测方法、光滑极限量规的设计、形状和位置误差的检测原则与方法。
学习难点:光滑极限量规的设计;形大形状和位置误差的检测原则与方法。
习 题一、判断题(正确的打√,错误的打×)1、光滑极限量规是依据包容原则综合检验光滑工件的尺寸与形状的无刻度的检具。
( )2、光滑量规通规的基本尺寸等于工件的最大极限尺寸。
( )3、止规用来控制工件的实际尺寸不超越最大实体尺寸。
( )4、检验孔的尺寸是否合格的量规是通规,检验轴的尺寸是否合格的量规是止规。
( )5、塞规是检验孔用的极限量规,它的通规是根据孔的最小极限尺寸设计的。
( )6、环规是检验轴用的极限量规,它的通规是根据轴的最小极限尺寸设计的。
( )7、塞规中的止规是按轴的最大极限尺寸设计的,作用是防止轴的实际尺寸大于轴的最大极限尺寸。
( )8、用以检验工作量规的量规是校对量规。
( )9、塞规的工作面应是全形的,卡规应是点状的。
( )10、通规和止规公差由制造公差和磨损公差两部分组成。
( )11、给出量规的磨损公差是为了增加量规的制造公差,使量规容易加工。
( )12、规定位置要素Z 是为了保证塞规有一定使用寿命。
( )13、国家标准规定,工作量规采用内缩极限。
( )14、安全裕度由测量器具的不确定度所决定。
( )15、验收极限即最大极限尺寸和最小极限尺寸分别减速去一个安全裕度A 。
( )二、选择题(将下面题目中所有正确的论述选择出来)1、按极限尺寸判断原则,某轴mm0800240032。
--φ实测直线度误差为0.05mm 时,其实际尺寸合格的有_____________。
三、摩擦、磨损及润滑概述1、如何用膜厚比衡量两滑动表面间的摩擦状态?【答】膜厚比(λ)用来大致估计两滑动表面所处的摩擦(润滑)状态。
式中,min h 为两滑动粗糙表面间的最小公称油膜厚度,1q R 、2q R 分别为两表面轮廓的均方根偏差。
膜厚比1≤λ时,为边界摩擦(润滑)状态;当31~=λ时,为混合摩擦(润滑)状态;当3>λ时为流体摩擦(润滑)状态。
2、机件磨损的过程大致可分为几个阶段?每个阶段的特征如何?【答】试验结果表明,机械零件的一般磨损过程大致分为三个阶段,即磨合阶段、稳定磨损阶段及剧烈磨损阶段。
1) 磨合阶段:新的摩擦副表面较粗糙,在一定载荷的作用下,摩擦表面逐渐被磨平,实际接触面积逐渐增大,磨损速度开始很快,然后减慢;2) 稳定磨损阶段:经过磨合,摩擦表面加工硬化,微观几何形状改变,从而建立了弹性接触的条件,磨损速度缓慢,处于稳定状态;3) 剧烈磨损阶段:经过较长时间的稳定磨损后,因零件表面遭到破化,湿摩擦条件发生加大的变化(如温度的急剧升高,金属组织的变化等),磨损速度急剧增加,这时机械效率下降,精度降低,出现异常的噪声及振动,最后导致零件失效。
3、何谓油性与极压性?【答】油性(润滑性)是指润滑油中极性分子湿润或吸附于摩擦表面形成边界油膜的性能,是影响边界油膜性能好坏的重要指标。
油性越好,吸附能力越强。
对于那些低速、重载或润滑不充分的场合,润滑性具有特别重要的意义。
极压性是润滑油中加入含硫、氯、磷的有机极性化合物后,油中极性分子在金属表面生成抗磨、耐高压的化学反应边界膜的性能。
它在重载、高速、高温条件下,可改善边界润滑性能。
4、润滑油和润滑脂的主要质量指标有哪几项?【答】润滑油的主要质量指标有:粘度、润滑性(油性)、极压性、闪点、凝点和氧化稳定性。
润滑脂的主要质量指标有:锥(针)入度(或稠度)和滴点。
5、什么是粘度?粘度的常用单位有哪些?【答】粘度是指润滑油抵抗剪切变形的能力,标志着油液内部产生相对运动运动时内摩擦阻力的大小,可定性地定义为它的流动阻力。
机械精度设计与检测技术基础作者:---------------- 日期:一、液压部分(一)选择1. 液压油的粘度(2 )(1)随压力的增大而增大,随温度的增大而增大;( 2 )随压力的增大而增大,随温度的增大而减少;(3)随压力的增大而减少,随温度的增大而增大;(4)随压力的增大而减少,随温度的增大而减少。
2. 液压系统的工作压力取决于(3 )(1)液压泵的额定压力;(2)溢流阀的调定压力;3)系统的负载;4)液压油的粘度3. 冲击气缸的工作特点是(2 )(1)动能大,行程长;(2)动能大,行程短;(3)动能小,行程长;(4)动能小,行程短.。
4. 溢流阀起到安全作用的回路是(1 )(1)进口节流调速回路;(2)出口节流调速回路;(3)旁路节流调速回路;(4)进出口同时节流调速回路。
5. 通过调速阀的流量(2 )(1)只取决于开口面积大小,而与负载无关;(2)只取决于开口负载大小,而与开口面积无关;(3)与开口面积和负载大小均有关;(4)与开口面积和负载大小均无关。
6 、液压泵的理论流量(1 )(1)取决于结构参数及转速、而与压力无关(2)取决于结构参数、转速及压力。
(3) 取决于结构参数及压力、而与转速无关 (4) 取决于压力及转速、而与结构参数无关 7、气压传动的突出特点是(2 )(1)反应快,动作稳定性好; (3)反应慢,动作稳定性好;10 .差动连接回路是:(1 )11 .伯努利方程反应的是:(3 )(1)质量守恒;(2)动量守恒;(3)能量守恒;(4)能量矩守恒12.用来区分光滑金属园管层流,紊流的临界雷诺数是:(4 )(1) 3 2 2 0 ; ( 2 ) 2 2 3 0 ; (3) 2 0 2 3 ; (4) 2 3 2 0。
8、图示气路为 (1 ) (1)“与门”气路; (2)“或门”气路; (3) “或非”气路; (4)“与非”气路。
(a 、9、图示图形符号为(2 ) (1 )溢流阀; (2 )减压阀; (3 )顺序阀; (4)平衡阀(2)反应快,动作稳定性差;(1)增速回路,负载能力小 (2)减速回路,负载能力小; (3)增速回路,负载能力大(4)减速回路,负载能力大(二)填空1•液压系统单位重量的输出功率高,可以实现大范围调速。
《机械设计及应用》下册复习题一、选择题1、螺纹按用途可分为(C)螺纹两大类。
A、左旋和右旋B、外和内C、联接和传动D、三角形和梯形2、联接螺纹要求自锁性好,传动螺纹要求(C)。
A、平稳性好 B 、刚性好 C、效率高 D、螺距大3、当被联接件之一很厚,联接需常拆装时,采用(A)联接。
A、双头螺柱B、螺钉C、紧定螺钉D、螺栓4、重要联接的螺栓直径不宜小于M12,这是由于(B)。
A、结构要求B、防止拧紧时过载折断C、便于加工和装配D、要求精度高5、受轴向载荷的紧螺栓所受的载荷是(B)。
A、工作载荷B、预紧力C、工作载荷+预紧力D、工作载荷+螺纹力矩6、箱体与箱盖用螺纹联接,箱体被联接处厚度较大,要求联接结构紧凑,且需经常拆卸箱盖进行修理,一般采用(C)。
A、螺钉联接B、螺栓联接C、双头螺柱联接D、紧定螺钉联接7、矩形螺纹主要用于传动,它的主要优点是( B)。
A、不会自锁B、传动效率高C、制造方便D、强度较高8、高速重载齿轮传动的主要失效形式为(B)。
A、齿面胶合B、齿面磨损和齿面点蚀C、齿面点蚀D、齿根折断9、为了提高齿轮齿根弯曲强度应(C)。
A、增大分度圆直径B、增加齿数C、增大模数D、减小齿宽10、一对啮合的齿轮,若材料不同,它们的齿面接触应力(C)。
A、σH1 > σH2B、σH1 〈σH2C、σH1=σH2D、不确定11、(C)对齿面接触应力的大小无直接影响。
A、中心距B、模数C、齿宽D、传动比12、齿轮传动的特点是(A)。
A、传动效率高B、使用寿命短C、噪音大D、制造和安装精度低13、能够实现两轴转向相同的齿轮机构是(B)。
A、外啮合圆柱齿轮机构B、内啮合圆柱齿轮机构C、圆锥齿轮机构D、蜗杆蜗轮机构14、决定渐开线齿廓形状的基本参数是(C)。
A、模数B、模数和齿数C、模数和压力角D、模数、齿数和压力角15、下列斜齿圆柱齿轮螺旋角中,(B)是实际中常用的。
A、2°~8°B、8°~20°C、20°~30°D、30°~45°16、润滑良好的闭式传动的软齿面齿轮,其主要失效形式是(D)。
第二章 机械精度设计中的基础标准12. 查表并计算下列三对孔、轴的极限偏差、标准公差、基本偏差、极限尺寸、极限间隙或过盈、平均间隙或过盈以及配合公差,说明它们的基准制和配合类别,并且分别用公差带图标示。
(1)6750h U φ 孔:750U φ轴:650h φ 标准公差 m IT μ257= m IT μ166= 基本偏差 m ES μ61-=m es μ0=极限偏差 m ES μ61-= m es μ0= 极限尺寸 939.49φ=MAX D 50φ=MAX d 极限过盈 m ei ES Y MIN μ451661-=+-=-= 平均过盈 m Y Y Y MIN MAX av μ5.65286452-=--=+=配合公差 m T T T s h f μ411625=+=+= 基准制和配合类别 基孔制,过盈配合 (2)6745n H φ 孔:745H φ轴:645n φ标准公差 m IT μ257=m IT μ166= 基本偏差 m EI μ0=m ei μ17+=极限偏差 m ES μ25+= m es μ33+= 极限尺寸 025.45φ=MAX D 033.45φ=MAX d 极限过盈 m ei ES X MAX μ81725+=-=-= 或过盈 m es EI Y MAX μ33330-=-=-=平均过盈 m Y X Y MAX MAX av μ5.1223382-=-+=+=配合公差 m T T T s h f μ411625=+=+= 基准制和配合类别 基孔制,过渡配合 (3)6740h G φ 孔:740G φ轴:640h φ 标准公差 m IT μ257=m IT μ166=基本偏差 m EI μ9+=m es μ0=极限偏差 m ES μ34+= m es μ0= 极限尺寸 034.40φ=MAX D 40φ=MAX d 极限间隙 m ei ES X MAX μ501634+=+=-= 平均间隙 m X X X MIN MAX av μ5.2929502+=+=+=配合公差 m T T T s h f μ411625=+=+= 基准制和配合类别 基轴制,间隙配合15 下列配合中,它们分别属于哪种基准制的配合和哪类配合,并确定孔和轴的最大间隙或最小过盈,最小间隙和最大过盈。
(1)8850f H φ 基孔制间隙配合(3)56140r H φ 基孔制过盈配合(6) 6750js H φ 基孔制过渡配合19习题图1所示为圆锥齿轮毛坯,下列有关要素为形位公差要求,试按形位公差标准规定将其标注在图样上。
(1) 圆锥面a 的圆度公差为0.01mm ;(2) 圆锥面a 对孔轴线b 的斜向圆跳动公差为0.02mm ; (3) 基准孔b 的轴线直线度公差为0.005mm ; (4) 孔表面c 的圆柱度公差为0.01mm ;(5) 端面d 对基准孔轴线b 的端面全跳动公差0.05mm ; (6) 端面e 对端面d 的平行度公差0.03mm 。
20将下列形位公差要求,按国家标准规定标注在习题图2 上。
(1) 358f ¢圆柱面的圆度公差为0.011mm ;(2) 大端为32¢mm 的圆锥面对基准358f ¢轴线的圆跳动公差为0.020mm ; (3) 大端为32¢mm 圆锥面的轴线对基准358f ¢轴线的同轴度公差为0.012¢;(4) 358f ¢圆柱面的表面粗糙度为aR 上限值为1.25m μ,下限值为0.80m μ,取样长度为0.8mm ;(5) ¢10mm 孔的轴线对基准358f ¢轴线的垂直度公差为0.010mm ; (6) 车端面A ,要求表面粗糙度zR 的最大值为6.3m μ,取样长度为2.5mm 。
第三章 机械精度设计基础标准的应用12.对孔轴配合,基本尺寸为¢45,其中配合间隙为Xmax=+50μm,Xmin=+9μm,试确定其:①选用的基准制,②孔、轴的公差等级,基本偏差代号与配合种类,③孔、轴的尺寸公差,④且画出公差带图。
设:5.202====fs h c T T T T查表取公差等级:m IT μ257= m IT μ166= 取基轴制:645h φ 0=es 016.0-=ei 孔取:745G φ 034.0+=ES 009.0+=EI13.有下列三组孔与轴相配合,根据给定的数值,试分别确定它们的公差等级,并选用适当的配合。
(1)配合的基本尺寸为 mm 25φ,maxX =+0.086mm,minX =+0.020mm设:332====fs h c T T T T查表取公差等级:m IT μ338= 取基孔制:825H φ 033.0+=ES 0=EI (2)配合的基本尺寸为mm 40φ,maxY =-0.076mm,minY =-0.035mm设:5.202====fs h c T T T T查表取公差等级:m IT μ257= m IT μ166= 取基轴制:640h φ 0=es 016.0-=ei (3)配合的基本尺寸为mm 60φ,maxY =-0.032mm,maxX =+0.046mm设:392====fs h c T T T T查表取公差等级:m IT μ468= m IT μ307= 取基孔制:860H φ 046.0+=ES 0=EI15.加工一对习题图1(a )、(b )所示的0.022000.02208()/8()H h +-+-¢1孔、轴零件,实测数据如下:①轴直径98.9φmm 轴的轴线直线度误差02.0φmm ; ②孔径02.10φmm 孔的轴线直线度误差02.0φmm 。
试确定该孔、轴是否合格?① 遵守包容要求,轴直径在98.9φ时允许的轴线直线度误差为02.0φ 此时的直线度误差为02.0012.0φφ<,所以零件合格。
② 遵守包容要求,孔直径在02.10φ时允许的轴线直线度误差为02.0φ 此时的直线度误差为02.0012.0φφ<,所以零件合格。
16. 习题图2所示的零件加工后,测得其孔的实际尺寸为mm 02.50φ, 孔的同轴度误差为mm 06.0φ,试回答: (1)遵守什么原则?边界? (2)其(体外)作用尺寸?(3)判断合格性?(1)最大实体实效要求,最大实体实效边界,边界尺寸mm 95.49φ (2)96.4906.002.50=-=-=f D D a fe(3)孔直径在02.50φ时允许的轴线直线度误差为07.002.005.0=+ 实际同轴度误差07.006.0φφ<,合格23.习题图9所示轴套的四种标注方法,试分析说明它们所表示的要求有何不同(包括采用的公差原则、公差要求、理想边界尺寸、允许的垂直度误度值等)?并填入习题表3内。
24.试采用正确的标注方法,改正图10中各图的错误标注 25.试采用正确的标注方法,改正图11中各图的错误标注 26.试将下列要求标注在习题图12上。
(1) 730K φ和750M φ采用包容原则; (2) 底面F 的平面度公差0.02mm ;(3) 730K φ孔和750M φ孔的内端面对它们的公共轴线的圆跳动公差为0.04mm ;(4) 730K φ孔和750M φ孔对它们的公共轴线的同轴度公差为03.0φmm ; (5) 115φ⨯对750M φ孔的轴线和F 面的位置度公差为0.05mm,其基准要素的尺寸和被测要素的位置度公差的关系用最大实体原则。
27.习题图13所示,用分度值为0.02/1000 mm 的水平仪,按“节距法”测量床身导轨在垂直平面内的直线度误差,节距长度为300 mm ,共测量五个节距六个测点,其中,导轨面的六个测点的水平仪读数(单位:格)依次为:0,+1,+4.5,+2.5,-0.5,-1。
试问按图示的直线度公差要求,被测导轨面的直线度是否合格?序号: 0 1 2 3 4 5 测得值(格) 0 +1 +4.5 +2.5 -0.5 -1 绝对值(格) 0 +1 +5.5 +8 +7.5 +6.5 测得值(μm ) 0 +6 +33 +48 +45 +39)39,5()6,1(b kx y += 代入)48,3(433bx y += 代入t f >Θ 不合格第四章 常用典型零件精度设计基础56.某减速器中.一对直齿圆柱齿轮副的圆周速度8/v m s =,两齿轮的齿数分别为:201=Z ,342=Z ,模数2m mm =,基准齿形角20α=o。
齿轮材料为钢,线膨胀系数161105.11--⨯=K α,工作温度C t ︒=801;箱体材料为铸铁,线膨胀系数162105.10--⨯=K α,工作温度C t ︒=601。
试求齿轮副的极限间隙。
解:根据圆周速度 s m v /8=,查表4-51,取7级精度。
中心距 542)3420(2=+⨯=a最小侧隙 098.0)203.0540005.006.0)(3/2(min =⨯+⨯+=bn j 齿厚上偏差 052.020cos 2098.0cos 2min -=-=-=αbn ss j E查表4-49,m F r μ23=,(240==m d f )查表4-54及表2-2,m b r μ62=,(629=IT ) 齿厚公差 048.0tan 222=⨯⨯+=αr r s b F T 齿厚下偏差 100.0048.0052.0-=--=-=s ss si T E E 齿厚 14.32090sin 22090sin=⨯⨯==Z Zm S 故小齿轮的齿厚及其极限偏差为:052.0100.014.3--检验项目及其允许值:单个齿距极限偏差,查表4-39 齿距累积总公差,查表4-40 齿廓总公差,查表4-41 螺旋线总公差,查表4-42 m F μβ14= (齿宽b=15) 径向综合总公差,查表4-47一齿径向综合公差,查表4-4857.测量一个齿数16=Z 的直齿圆柱齿轮的齿圈径向跳动r F ,测得数据见习题表5所示。
试求出该齿轮的齿圈径向跳动误差r F ∆且作出误差的曲线,并分析产生误差的主要原因。
齿圈径向跳动误差m F r μ25=∆,该误差主要由齿坯的安装误差引起的。
58.用相对测量法测量模数齿数12=Z ,mm m 3=的直齿圆柱齿轮的齿距累积误差P F 及齿距偏差pt f ,测得数据见习题表6所示。
设该齿轮的精度等级为7(pF )6(aF 、F β)/10095.12001GB T -,问该齿轮的△P F 和△pt f 是否合格?修正值 5.412-=-=K 单个齿距极限偏差,查表4-39m f pt μ12±= 不合格齿距累积总公差,查表4-40m F p μ38= 合格第五章 测量技术基础20.用某一测量方法在等精度的情况下对某一试件测量了四次,其测得值如下(单位为mn):20.001,20.002,20.000,19.999。