伺服作动器
- 格式:pdf
- 大小:431.30 KB
- 文档页数:26

伺服驱动器原理概述及解释说明1. 引言1.1 概述伺服驱动器作为一种关键的控制设备,在现代工业中发挥着重要的作用。
它主要用于控制电机和执行器的运动,通过实时监测和调整输出信号,使得目标位置或速度可以精确控制。
伺服驱动器具有高精度、高稳定性和高可靠性等特点,已广泛应用于机械加工、自动化生产线、机器人技术等领域。
1.2 文章结构本文将分为五个部分进行介绍和解释说明。
首先,在引言部分我们将对伺服驱动器的基本概念和原理进行简要叙述,并明确文章的研究框架。
其次,我们将详细讲解伺服驱动器的原理,包括定义与基本原理、控制系统组成以及运行方式和特点等方面内容。
然后,我们将对伺服驱动器进行概述,涉及其发展历史、应用领域与需求以及常见类型和分类等方面。
接下来,我们会在第四部分解释说明伺服驱动器的工作原理,重点介绍反馈系统、控制算法和实时响应性能以及电机控制和反馈信号处理技术等内容。
最后,在结论部分,我们将总结主要内容与观点、归纳核心意义和应用价值,并展望未来伺服驱动器的发展方向。
1.3 目的本文旨在全面介绍伺服驱动器的原理与概述,并解释说明其工作原理。
通过对伺服驱动器的深入研究和分析,可以帮助读者更好地理解和运用伺服驱动器技术,并为相关领域的工程师、学者和爱好者提供有益信息和启示。
此外,文章还致力于探讨未来伺服驱动器发展的趋势和前景,以期推动相关技术的进步与创新。
2. 伺服驱动器原理:2.1 定义与基本原理伺服驱动器是一种用于控制伺服电机运动的设备,通过将输入信号转换为输出控制信号来实现精确的位置、速度和加速度控制。
它主要由控制系统和执行系统两部分组成。
基本原理是通过接收反馈信号并与参考输入进行比较,根据误差信号来调整输出信号,以使系统稳定在期望的状态。
伺服驱动器可以实现高精度和高性能的运动控制,广泛应用于自动化领域。
2.2 控制系统组成伺服驱动器的控制系统主要由下列几个组成部分构成:- 参考输入:指定所需的运动参数,如位置、速度和加速度。
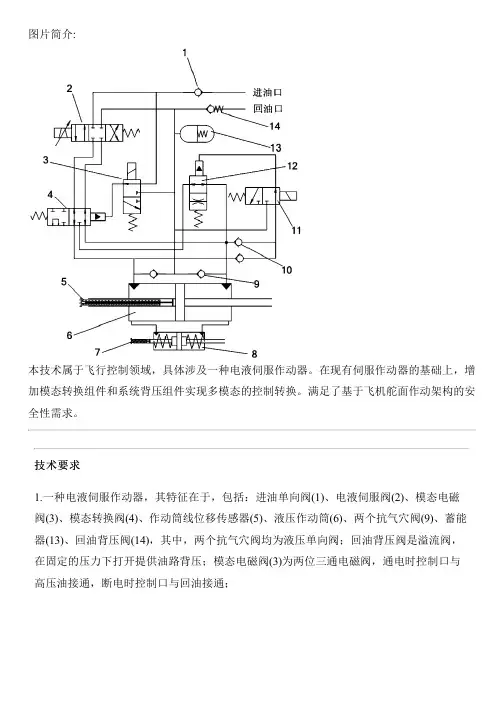
图片简介:本技术属于飞行控制领域,具体涉及一种电液伺服作动器。
在现有伺服作动器的基础上,增加模态转换组件和系统背压组件实现多模态的控制转换。
满足了基于飞机舵面作动架构的安全性需求。
技术要求1.一种电液伺服作动器,其特征在于,包括:进油单向阀(1)、电液伺服阀(2)、模态电磁阀(3)、模态转换阀(4)、作动筒线位移传感器(5)、液压作动筒(6)、两个抗气穴阀(9)、蓄能器(13)、回油背压阀(14),其中,两个抗气穴阀均为液压单向阀;回油背压阀是溢流阀,在固定的压力下打开提供油路背压;模态电磁阀(3)为两位三通电磁阀,通电时控制口与高压油接通,断电时控制口与回油接通;进油口通过管路与进油单向阀(1)进口连接,进油单向阀(1)出口通过管路与电液伺服阀(2)进油口连接,电液伺服阀(2)的回油口通过管路与回油背压阀的进口连接,回油背压阀出口通过管路与回油口连接,电液伺服阀(2)的两个负载口分别通过两条管路与模态转换阀(4)的两个进油口连接,模态转换阀(4)的第一负载口和第二负载口分别通过两条管路与液压作动筒(6)的第一油管嘴和第二油管嘴连接;模态电磁阀(3)进油口通过管路与进油单向阀(1)出口连接,模态电磁阀(3)回油口通过管路与回油背压阀进口连接,模态电磁阀(3)控制口通过管路与模态转换阀(4)液压控制口连接;液压作动筒(6)的第一油管嘴和第二油管嘴通过两条管路分别与两个抗气穴阀的出油口连接,两个个抗气穴阀的进油口通过管路与回油背压阀的进口连接;蓄能器(13)通过管路与回油背压阀的进口连接;作动筒线位移传感器(5)安装在液压作动筒(6)内部,作动筒线位移传感器(5)铁芯与作动筒活塞固连,作动筒线位移传感器(5)线圈与作动筒筒体固连固定。
2.根据权利要求1所述的作动器,其特征在于,还包括:压差作动筒线位移传感器(7)和压差作动筒(8),其中,液压作动筒(6)的第一油管嘴和第二油管嘴通过两条管路分别与压差作动筒(8)的两个油管嘴连接,压差作动筒线位移传感器(7)安装在压差作动筒(8)内部,压差作动筒线位移传感器(7)铁芯与压差作动筒(8)活塞固连,压差作动筒线位移传感器(7)线圈与压差作动筒(8)筒体固连固定。
电液伺服作动器工作原理你有没有想过,为什么一些机器能够精准地完成复杂的动作?比如,叉车那样的大型设备能够轻松搬运重物,或者是高精度的工程机械能在狭小空间里准确操作,甚至像飞机那样的飞行控制系统也能做到那么精确,令人咋舌。
答案其实都和一个不太显眼,但却非常强大的设备息息相关——电液伺服作动器。
它听起来有点高深,对吧?但其实它就是通过电和液压的“联手合作”,让机器动作灵活又精准。
咱们就来聊聊它是怎么一回事。
电液伺服作动器这名字,乍一听有点儿拗口,不是吗?不过,如果你把它拆开来看,就没那么复杂了。
电指的就是电力,液则代表液压,而伺服呢,就是“服务”的意思,指的是自动调整、控制的过程。
简单来说,这个装置就是通过电力来控制液体(通常是油)在系统中的流动,从而让机器部件完成精确的动作。
说白了,它就是“电”来控制“油”,然后“油”再推动机器动起来。
你知道吗,这种装置其实特别聪明。
它不像普通的电动机那样直接把电转化成机械能,它通过电信号来指挥液压系统,让油在管道里快速流动,产生强大的推力来驱动机械。
就好像是你在开车时踩油门,油门会传递信号给发动机,然后发动机就开始工作,推动车子前进。
不同的是,电液伺服作动器的“油门”特别精确,甚至能做到微小的调整,控制速度、位置,甚至是力量的变化,做到精密操作。
再说它的优势,哎呀,简直是“如虎添翼”!你想想,液压系统本身就具备很大的力量,结合了电控的精确调节,简直就是“扛得住,稳得住”。
就像是拳击手戴上了智能手套,力量和精度兼备,能在对抗中完美发力。
它的控制不仅非常灵敏,而且能在复杂的环境下稳定运行。
比如飞机、航天器、甚至是高端制造设备中,它们都需要这种精确、快速响应的动作来确保安全与效率。
任何微小的失误都可能带来不必要的损失或危险,而电液伺服作动器就是在这样的高压环境下,展现出它无与伦比的“功夫”。
你可能会想,它是怎么做到这么精确的呢?嗯,这就要说到它的“控制系统”了。
说白了,就是一个大脑,时时刻刻在观察和调整作动器的动作。


伺服作动器工作原理
伺服作动器工作原理:伺服作动器是一种能够执行精确控制的电动驱动装置,它主要由一个电动机、减速器、编码器和控制器组成。
1. 电动机:伺服作动器采用直流电动机或交流电动机作为动力源,它能够将电能转换为机械能,提供驱动力。
2. 减速器:伺服作动器通常需要提供较大的转矩输出和较低的转速,因此在电动机和负载之间安装了一个减速器。
减速器可以减小电机转速,增大输出转矩,以满足应用的需求。
3. 编码器:编码器是伺服作动器的重要组成部分,它能够测量和反馈电动机的转矩、转速和位置信息。
编码器通常采用光电、磁性或光学技术,将运动信息转化为电信号,通过反馈系统传递给控制器。
4. 控制器:控制器是伺服作动器的核心部分,它接收来自编码器的反馈信号,并与预设的控制信号进行比较,计算出误差信号。
根据误差信号,控制器会调整驱动电机的输出力矩和转速,使其与预期的运动曲线相匹配。
控制器通常使用闭环控制系统,能够实现精确的位置、速度和力矩控制。
通过以上的组成部分和工作原理,伺服作动器能够实现高精度、高速度和高扭矩的运动控制,广泛应用于机械制造、自动化设备、机器人等领域。
mts831作动器原理
MTS831作动器是一种电液伺服阀,它的原理是利用电磁力控制
液压系统的液压流量和压力,从而实现对执行器的精准控制。
作动
器的原理基本上可以分为电气控制和液压控制两个方面。
首先,从电气控制的角度来看,MTS831作动器通过接收电气信号,利用电磁铁产生的磁场来控制阀芯的运动,从而改变液压系统
中的液压流量和压力。
当电气信号输入时,电磁铁会产生磁场,使
阀芯移动到相应的位置,改变液压阀的通道大小,从而调节液压系
统的工作状态。
其次,从液压控制的角度来看,MTS831作动器通过调节液压系
统中的液压阀,控制液压油的流动方向、流量和压力,进而控制执
行器的运动。
液压系统中的液压阀可以根据电气控制信号的输入,
调节液压油的流动,使执行器按照预先设定的路径和速度进行运动。
总的来说,MTS831作动器的原理是通过电气控制和液压控制相
结合,实现对液压系统的精准控制,从而实现对执行器的精准运动
控制。
这种原理使得MTS831作动器在工业自动化控制系统中得到广
泛应用,能够满足对执行器运动精度和稳定性要求较高的场合。
伺服驱动器原理_伺服驱动器的作用什么是伺服驱动器伺服驱动器(servodrives)又称为“伺服控制器”、“伺服放大器”,是用来控制伺服电机的一种控制器,其作用类似于变频器作用于普通交流马达,属于伺服系统的一部分,主要应用于高精度的定位系统。
一般是通过位置、速度和力矩三种方式对伺服电机进行控制,实现高精度的传动系统定位,目前是传动技术的高端产品。
伺服驱动器是现代运动控制的重要组成部分,被广泛应用于工业机器人及数控加工中心等自动化设备中。
尤其是应用于控制交流永磁同步电机的伺服驱动器已经成为国内外研究热点。
当前交流伺服驱动器设计中普遍采用基于矢量控制的电流、速度、位置3闭环控制算法。
该算法中速度闭环设计合理与否,对于整个伺服控制系统,特别是速度控制性能的发挥起到关键作用。
在伺服驱动器速度闭环中,电机转子实时速度测量精度对于改善速度环的转速控制动静态特性至关重要。
为寻求测量精度与系统成本的平衡,一般采用增量式光电编码器作为测速传感器,与其对应的常用测速方法为M/T 测速法。
M/T测速法虽然具有一定的测量精度和较宽的测量范围,但这种方法有其固有的缺陷,主要包括:1)测速周期内必须检测到至少一个完整的码盘脉冲,限制了最低可测转速;2)用于测速的2个控制系统定时器开关难以严格保持同步,在速度变化较大的测量场合中无法保证测速精度。
因此应用该测速法的传统速度环设计方案难以提高伺服驱动器速度跟随与控制性能。
伺服驱动器工作原理目前主流的伺服驱动器均采用数字信号处理器(DSP)作为控制核心,可以实现比较复杂的控制算法,实现数字化、网络化和智能化。
功率器件普遍采用以智能功率模块(IPM)为核心设计的驱动电路,IPM内部集成了驱动电路,同时具有过电压、过电流、过热、欠压等故障检测保护电路,在主回路中还加入软启动电路,以减小启动过程对驱动器的冲击。
功率驱动单元首先通过三相全桥整流电路对输入的三相电或者市电进行整流,得到相应的直流电。
伺服驱动器结构原理
伺服驱动器是一种常用于控制伺服电机运动的设备。
它主要由供电模块、控制器、电机驱动和反馈装置组成。
首先,供电模块是伺服驱动器的核心部分,提供所需的电能给驱动器的
其他组件。
供电模块能够将来自电源的交流电转换为直流电,并对电流进行
稳定和过载保护。
其次,控制器是控制伺服驱动器工作的关键元素。
它能够接收来自使用
者的指令,并将其转化为电信号发送给电机驱动器。
控制器还负责监测反馈
装置提供的反馈信号,并根据需要调整电机的速度、加速度和位置等参数。
电机驱动是伺服驱动器中的另一个重要组件。
它通过控制电流的大小和
方向来驱动电机的旋转。
电机驱动器通常采用功率晶体管或IGBT等器件,
能够在很短的时间内进行快速的开关以实现对电机的精确控制。
最后,反馈装置是伺服驱动器中用于监测电机运动状态的部分。
反馈装
置可以是编码器、脉冲发生器或传感器等,能够实时测量电机的位置、速度
和转矩等参数,并将这些信息反馈给控制器。
控制器通过对反馈信号的处理,能够实现对电机运动的精确控制。
总体来说,伺服驱动器通过供电模块提供电能,控制器接收指令并控制
电机驱动器的工作,电机驱动器通过控制电流驱动电机的转动,反馈装置实
时监测电机运动状态。
这一整套结构原理使伺服驱动器成为一种高精度、高
可靠性的电机控制设备,广泛应用于机械制造、自动化控制等领域。
农业机械学报第51卷第12期2020年12月doi:10.6041/j.issn.1000-1298.2020.12.043基于内模控制的主动悬挂电液伺服作动器位置控制研究郭庆贺;,2赵丁选;,2赵小龙;,2李振兴;,2武理哲;,2师小波心(1.燕山大学机械工程学院,秦皇岛066004;2.燕山大学河北省特种运载装备重点实验室,秦皇岛066004;3.燕山大学电气工程学院,秦皇岛066004)摘要:针对负载质量和负载力等参数不确定的主动悬挂电液伺服作动器位置控制系统,采用内模控制方法对其进行位置控制。
根据系统特性建立了电液伺服作动器位置控制系统线性化数学模型,并基于此模型设计了内模控制器。
为验证内模控制器的控制效果,进行了与PID控制的对比仿真分析和台架试验。
以阶跃信号为输入信号进行了仿真分析,仿真结果表明,系统在内模控制下的单位阶跃响应快速、平稳、无超调,动态特性优于PID控制,且当系统受到外部干扰时,内模控制比PID控制能更快速、平稳地恢复至稳态值。
台架试验包括改变正弦输入信号频率和改变负载质量两种试验方案。
结果表明,当正弦输入信号频率由0.1Hz增加至2Hz时,基于PID控制的系统跟踪性能明显恶化,而基于内模控制的系统跟踪性能并无明显变化;当负载质量发生变化时,基于内模控制的系统跟踪误差变化幅度明显小于PID控制。
基于内模控制的电液伺服作动器位置控制系统的跟踪响应性能优于PID 控制,满足主动悬挂系统的使用要求。
关键词:主动悬挂;电液伺服作动器;内模控制;位置控制中图分类号:TP273;U463.33文献标识码:A文章编号:1000-1298(2020)12-0394-11OSID:f Internal Model Control in Position Control of Active SuspensionElectro-hydraulic Servo ActuatorGUO Qinghe1';ZHAO Dingxuan1,;ZHAO Xiaolong1,;LI Zhenxing1,;WU Lizhe;,;SHI Xiaobo;'3(1.College of Mechanical Engineering,Yanshan University,Qinhuangdao066004,China2.Key Laboratory of Special Carrier Equipment of Hebei Province,Yanshan University,Qinhuangdao066004,China3.School of Electrical Engineering,Yanshan University,Qinhuangdao066004,China)Abstract:Aiming at the position control system of active suspension electro-hydraulic servo actuator with uncertain load mass and load force,the internal model control method was used to control the position of the actuator.Firstly,according to the characteristics of the system,the linear mathematical model of the electro-hydraulic servo actuator position control system was established,and then the internal model controller was designed based on the model.In order to verify the control effect of internal model controller,the simulation analysis and bench test were compared with PID controller.The step signal was used as the input signal for simulation analysis.The simulation results showed that the unit step response of the system under internal model control was fast,stable,no overshoot,and its dynamic characteristics were better than that of PID control.When the system was disturbed by external interference,it can return to the steady value more quickly and stably than PID control.The bench test included changing the frequency of sinusoidal input signal and changing the load quality.There were three kinds of experimental schemes.The experimental results showed that when the frequency of sinusoidal input signal was increased from0.1Hz to2Hz,the tracking performance of the system based on internal model control had no obvious change,while the tracking performance of the system based on PID control was obviously deteriorated when the sinusoidal input signal frequency was2Hz;the test results of changing load quality showed that when the load quality was changed,the system based on internal model control had no obvious change.The variation range of tracking error was obviously smaller than that of PID control.The 收稿日期:20200806修回日期:2020091;基金项目:国家重点研发计划项目(2016YFC0802902)作者简介:郭庆贺(;992—),男,博士生,主要从事工程机器人研究,E-mail:qinghekwok@通信作者:赵丁选(1965—),男,教授,博士生导师,主要从事复杂机械系统动力学及仿真和工程机器人研究,E-mail:**************.cn第12期郭庆贺等:基于内模控制的主动悬挂电液伺服作动器位置控制研究395tracking response performance of electro-hydraulic servo actuator position control system based on internal model control was better than that of PID control,and can meet the requirements of active suspension system.Key words:active suspension;electro-hydraulic servo actuator;internal model control;position control0引言电液伺服作动器是中型、重型车辆主动悬挂系统实施主动控制的核心部件,其作动性能直接影响主动悬挂系统的性能,进而影响整车的行驶平顺性和操纵稳定性。