哈工大控制原理专业课
- 格式:ppt
- 大小:1.16 MB
- 文档页数:37
哈工大控制科学与工程介绍
哈尔滨工业大学控制科学与工程专业是一门综合性强的学科,主
要涉及控制理论和工程、计算机应用、电子技术等学科。
它主要以研
究控制系统的基本原理和工程应用为主要内容,涉及了从传感器到执
行机构的电子、机械和软件子系统,因此它既是电子信息、机械制造
和计算机科学等学科的综合体,也是工程技术与实践的重要基础。
控制科学与工程专业的课程主要包括数学、物理、电路基础、信
号与系统、微机原理与接口技术、数字信号处理、电子设计自动化、
计算机程序设计、控制理论及其应用等。
学生通过理论学习及工程实践,能够熟悉掌握电机控制、机器人控制、航空航天控制、自动化生
产控制等领域的知识和技术,能够从事控制系统设计、实施和维护等
工作。
此外,该专业要求学生具有较强的数学、物理基础和计算机技术,能够独立思考、分析问题和解决问题,具备创新的能力和综合运用工
程知识的能力,能够适应新技术和新工艺的变化,这些素质都是控制
科学与工程领域人才所需要的。
哈尔滨工程大学控制工程专业考研经验贴先做个自我介绍,黑龙江某双非院校信息工程学院控制工程专业,现为哈尔滨工程大学在读控制研究生。
下面是各个科目的考研经验分享。
专业课810自动控制原理的复习:控制工程专业属于自动化学院,考研专业课考的是810自动控制原理,专业课自控复习参考书《自动控制原理》刘胜编,哈尔滨工程大学出版社,第一轮专业课复习就是刘胜课本+刘胜课后习题答案,对于一些同学来说,看书就足矣,因为自控考试重点非常明显,不管是本科期末考试还是历年研究生入学真题,基本上每个章节一道大题,课本知识消化了课后习题一定要去做!结合刘胜的答案对比一下,还有觉得题目不够可以用《胡寿松自动控制原理题海》这本题海拿来练手,在解答题目的时候计算量比较大,所以草稿纸我们可以通过写一些步骤打下草稿,再写重要步骤就行,另外我再说下难点,根轨迹不难,按照步骤解题就没错,一道题15分左右,按步骤来也差不多了,线性系统串联并联校正及非线性系统都是难点,刘胜课本基础性比较好,要是还有时间也可以利用胡寿松的自控原理,稍加复习;最后11月份,和数学一样对错题进行回顾,再把历年真题反复去练考前每个礼拜都要像考场一样进行模拟考试,并且在脑袋里面想象下考试的真实感觉,要的就是那种feel!公共课数学的复习:数学是分阶段复习的,第一阶段是基础阶段,可以用李永乐的《复习全书》时间安排可以放在3-7月份,一般是上午俩小时,我们都知道打基础往往是痛苦的,这个阶段我主要是跟着老师的视频复习,做好基础笔记并且适当训练自己的解题能力,这一阶段不是特别建议去做课后习题,讲真,从开始复习到考研我一直都没做过课后习题,因为觉得课后习题难度的维数和考研不在一个层次就没放在心上了。
第二个阶段,7-9月份,这个时候又是怀疑自己能力和智力不行的时候,所以想和大家说两个字,坚持!我用的是《张宇真题大全解》,由于我第一个阶段复习得比较扎实,唯一的就是缺乏题库的训练,所以我特别建议大家对于真题的训练可以多来几遍,不仅仅是张宇的真题大全解,张宇的资料跳跃性有点大,不是特别注意细节,但真题大全解也是很nice的,分门别类,我们在复习的时候也可以一目了然。
1. 数学基础:包括高等数学、线性代数、概率论与数理统计等。
2. 工程数学:特别是与控制相关的数学方法,如优化方法、偏微分方程等。
3. 基础控制理论:这可能包括离散系统控制、连续系统控制、现代控制理论等。
4. 信号与系统:学习连续时间和离散时间信号处理,线性时不变系统的分析方法等。
5. 数字信号处理:了解数字信号处理的基本理论和方法,以及在控制系统中的应用。
6. 机器人技术:基础机器人学、机器人控制、传感器融合和机器人路径规划等。
7. 先进控制技术:如模糊控制、神经网络控制、自适应控制、预测控制等。
8. 仿真与实验:通过软件仿真和硬件实验了解控制策略的设计和验证方法。
9. 其他相关课程:可能还包括系统工程、人工智能、模式识别、自动化原理等。
Harbin Institute of Technology课程设计说明书课程名称:自动控制原理设计题目:控制系统的设计和仿真院系:航天学院控制科学与工程系班级:设计者:学号:指导教师:设计时间:2013.2.25---2013.3.10哈尔滨工业大学一、 设计题目与题目分析1. 设计题目1) 已知控制系统固有传递函数如下:G (s )=K s(0.003s +1)(s 2282.72+2×0.7s 282.7+1)(s 27962+2×0.0684s 796+1) 2) 系统性能指标要求:(1) 超调量σ≤20%;(2) 响应时间t s ≤0.15s ;(3) 稳态误差e ss ≤0.01mm ;(4) 最大速度ṙ=0.5m/min ;2. 题目分析根据系统固有传递函数和系统性能指标要求,确定设计思路如下:首先完成使对系统无静差度和放大倍数的设计,稳态误差满足性能指标要求;再根据Bode 图设计串联校正环节,限制系统的相角裕度和剪切频率,最终使系统对阶跃响应的超调量和调整时间符合性能指标要求。
二、 人工设计1. 稳态误差设计根据系统固有传递函数,系统的无静差度符合要求,且系统放大倍数应符合如下要求:0.560×1K≤0.01×10−3 得到:K ≥833.33在设计中,为方便计算并留有余量,取K =1000,并代入系统固有传递函数。
2. 串联校正环节设计绘制系统固有传递函数部分的Bode 图,见附录。
根据性能指标第12条中对超调量和响应时间的规定,根据经验公式:σp=0.16+0.4(1sinγ−1)t s=πc[2+1.5(1−1)+2.5(1−1)2]计算得到对系统相角裕度和剪切频率的要求:γ≥65.38°ωc≥45.55 rad/s根据系统固有传递函数,求出系统的相角裕度和剪切频率:γ=−80.6°ωc=393 rad/s由于固有相角裕度过小而剪切频率远远大于性能指标要求,可先选用串联迟后校正:G C1(s)=τs+1βτs+1β>1取相角裕度γ=70°,根据原有Bode图计算得到β=23.7,并选取τ=0.24,T=5.67,由此确定串联迟后校正环节为:G C1(s)=0.24s+1加入迟后校正后,再绘制Bode图(见附录),得到:γ=64.9°ωc=42.3 rad/s此时,剪切频率和相角裕度都比要求之偏小,应用串联超前校正:G C2(s)=τs+1ατs+1α<1取ϕm=10°,根据Bode图得到 α=0.7,τ=0.024,T=0.0166,,由此确定串联超前校正环节为:G C2(s)=0.024s+1 0.0166s+1加入串联迟后—超前校正后得到系统新的Bode图(见附录),并根据Bode 图,得到控制系统新的相角裕度和剪切频率为;γ=72.3°ωc=50.8 rad/s知系统已经符合性能指标要求,并进行验算得到系统地超调量和响应时间为:σ=17.99%t s=0.1287s经过验算,知控制系统经过串联迟后—超前校正后,已经符合性能指标要求。
Harbin Institute of Technology课程设计说明书(论文)课程名称:自动控制原理课程设计设计题目:高精度五轴转台方位系统设计与仿真院系:航天学院班级:1104201设计者:学号:指导教师:李志诚由嘉设计时间:2014年2月哈尔滨工业大学哈尔滨工业大学课程设计任务书目录1、题目要求与分析 (5)1.1题目要求 (5)1.2 题目分析 (5)2、人工设计 (6)2.1 校正方法的选择 (6)2.2 串联迟后校正 (7)2.2.1 串联迟后校正计算 (7)2.2.2 验算 (8)2.3 局部反馈校正 (9)2.3.1 局部反馈校正计算 (9)2.3.2 验算 (11)2.4 校正结果的检验及修正 (11)3、计算机辅助设计 (12)3.1 校正前的开环simulink模型图 (12)3.2 校正前的开环Bode图 (13)3.3 校正后的开环simulink模型图 (14)3.4 校正后的开环Bode图 (14)3.5 校正后的闭环simulink模型图 (15)3.6 校正后的闭环单位阶跃响应仿真曲线 (15)3.7 校正后的闭环正弦响应仿真曲线 (16)4、校正装置电路图 (17)4.1 串联装置原理图 (18)4.2 串联迟后校正环节装置电路 (18)4.2 局部反馈校正环节装置电路 (18)5、设计总结 (19)6、心得体会 (20)1、题目要求与分析 1.1题目要求(1)、对于高精度五轴仿真转台方位系统,已知其固有传递函数为)18.5325.26491(87.95)()(2++=ss s s I s Q(2)、性能指标要求:a. 最大角速度s /500;b. 最大角加速度s /3500;c. 动态误差小于5角秒;d. 剪切频率高于50 1/s ;e. 相角裕度大于45度1.2 题目分析根据题目所给原系统传递函数如下:)18.5325.26491(87.95)()(2++=ss s s I s Q可画出原控制系统的方框图如下令=)(s G 1)18.5325.26491(87.95)()(2=++=s s s s I s Q可求得s rad c /190=ω 代入G(s)得0225)(-=∠c j G ω 045-=γ校正前的Bode 图如附录一所示。
哈工大控制科学与工程考研801控制原理大纲一、课程概述(80字)控制工程是现代科学和技术中的一门重要学科,是利用各种控制方法和技术对各种系统进行调节、稳定和优化的学科。
本课程主要介绍经典控制理论的基本概念、分析方法和设计技术,为学生提供掌握控制原理的基础知识和分析能力。
二、教学内容(400字)(一)经典控制理论1.控制系统基本概念:信号、系统、控制等;2.信号与系统分析:时域分析、频域分析;3.系统建模与传递函数:微分方程、传递函数、状态空间;4.单输入单输出系统的稳定性分析:根轨迹法、频率响应法;5.单输入单输出系统的稳定性设计:根轨迹设计、频率响应设计。
(二)现代控制理论1.状态空间分析与设计:状态空间模型、可观性和可控性分析、极点配置;2.频率域分析与设计:频率响应函数、束缚角和幅值移相、李阿普诺夫法;3.综合控制设计:状态反馈、输出反馈、积分控制、鲁棒控制、自适应控制。
(三)应用实例1.传动系统的控制;2.运动控制系统的控制;3.温度控制系统的控制;4.液压控制系统的控制。
三、教学目标(200字)通过本课程的学习,要求学生具备以下能力:1.掌握经典控制理论的基本概念、分析方法和设计技术;2.熟悉现代控制理论的状态空间分析、频率域分析和综合控制设计方法;3.能够利用所学的控制原理理论知识进行实际控制系统的建模、分析和设计;4.具备一定的工程应用能力,能够应用控制原理解决实际问题。
四、教学方法(200字)本课程采用“理论教学与应用实践相结合”的教学方法,具体包括以下几个方面:1.理论课讲授:通过授课形式,对控制原理的基本概念、分析方法和设计技术进行讲解;2.实验课程:通过实验操作,锻炼学生分析和解决实际问题的能力,加深学生对控制原理的理解;3.课堂讨论:通过课堂讨论,促进学生的思维活跃和自主学习,提高学生的问题解决能力;4.课程设计:通过完成控制系统的建模、分析和设计任务,提高学生的综合应用能力。
哈尔滨工程大学控制工程专业考研经验贴先做个自我介绍,黑龙江某双非院校信息工程学院控制工程专业,现为哈尔滨工程大学在读控制研究生。
下面是各个科目的考研经验分享。
专业课810自动控制原理的复习:控制工程专业属于自动化学院,考研专业课考的是810自动控制原理,专业课自控复习参考书《自动控制原理》刘胜编,哈尔滨工程大学出版社,第一轮专业课复习就是刘胜课本+刘胜课后习题答案,对于一些同学来说,看书就足矣,因为自控考试重点非常明显,不管是本科期末考试还是历年研究生入学真题,基本上每个章节一道大题,课本知识消化了课后习题一定要去做!结合刘胜的答案对比一下,还有觉得题目不够可以用《胡寿松自动控制原理题海》这本题海拿来练手,在解答题目的时候计算量比较大,所以草稿纸我们可以通过写一些步骤打下草稿,再写重要步骤就行,另外我再说下难点,根轨迹不难,按照步骤解题就没错,一道题15分左右,按步骤来也差不多了,线性系统串联并联校正及非线性系统都是难点,刘胜课本基础性比较好,要是还有时间也可以利用胡寿松的自控原理,稍加复习;最后11月份,和数学一样对错题进行回顾,再把历年真题反复去练考前每个礼拜都要像考场一样进行模拟考试,并且在脑袋里面想象下考试的真实感觉,要的就是那种feel!公共课数学的复习:数学是分阶段复习的,第一阶段是基础阶段,可以用李永乐的《复习全书》时间安排可以放在3-7月份,一般是上午俩小时,我们都知道打基础往往是痛苦的,这个阶段我主要是跟着老师的视频复习,做好基础笔记并且适当训练自己的解题能力,这一阶段不是特别建议去做课后习题,讲真,从开始复习到考研我一直都没做过课后习题,因为觉得课后习题难度的维数和考研不在一个层次就没放在心上了。
第二个阶段,7-9月份,这个时候又是怀疑自己能力和智力不行的时候,所以想和大家说两个字,坚持!我用的是《张宇真题大全解》,由于我第一个阶段复习得比较扎实,唯一的就是缺乏题库的训练,所以我特别建议大家对于真题的训练可以多来几遍,不仅仅是张宇的真题大全解,张宇的资料跳跃性有点大,不是特别注意细节,但真题大全解也是很nice的,分门别类,我们在复习的时候也可以一目了然。
哈工大自动控制原理哈工大自动控制原理引言•自动控制原理(Automatic Control Principle)是指利用控制系统对被控对象进行调节、管理和控制的学科。
它广泛应用于各个领域,如机械、电子、航空、化工等。
什么是自动控制原理•自动控制原理是一门研究如何设计、分析和改进控制系统的学科。
它主要研究控制系统的建模、控制方法和控制理论。
控制系统的基本组成•控制系统由四个基本组成部分构成:1.被控对象(Plant):也称为系统,在自动控制中是需要被控制的物理实体或过程。
2.传感器(Sensor):用于测量被控对象的状态或输出信号,并将其转换成电信号。
3.执行机构(Actuator):根据控制器的输出信号,将电信号转换成对被控对象施加的作用力、功率等。
4.控制器(Controller):基于传感器测量值,计算出控制器输出信号,并将其发送给执行机构。
自动控制的基本原理•自动控制的基本原理是建立在数学模型和控制方法上的。
其主要包括以下几个方面:1.系统建模:将被控对象的动态特性转化成数学方程。
常见的建模方法有传递函数法、状态空间法等。
2.稳定性分析:通过数学分析和计算,确定控制系统在各种工况下是否稳定。
常见的稳定性分析方法有根轨迹法、频域法等。
3.控制器设计:基于系统模型和稳定性要求,设计出适合的控制器。
常见的控制器设计方法有比例积分微分控制器(PID)方法、模糊控制方法等。
4.闭环控制:将测量信号通过反馈路径返回给控制器,以实现对被控对象的控制。
闭环控制可以提高系统的稳定性和鲁棒性。
自动控制在工程中的应用•自动控制在工程中有着广泛的应用,以下是一些常见的应用领域:1.工业自动化:包括工厂自动化、流水线控制、机器人控制等。
2.交通运输:包括交通信号灯控制、自动驾驶等。
3.航空航天:包括飞行控制、导航系统等。
4.电力系统:包括发电厂控制、电网调度等。
5.化工过程:包括化工生产、反应控制等。
结语•自动控制原理作为一门学科,研究如何设计和改进控制系统。
硕士研究生入学考试大纲
课程名称:【801 】控制原理
一、考试要求要求考生全面掌握控制原理的基本概念和基础理论,并具有运用基本概念和基础理论分析问题与解决问题的能力。
二、考试内容
1) 控制系统的数学描述控制系统的运动方程式控制系统的传递函数控
制系统的方框图及其简化信号流图控制系统的状态空间描述
2) 线性连续控制系统的分析线性系统的时域法线性系统的根轨迹法线
性系统的频域法线性系统的状态空间法
3) 线性离散控制系统的分析线性系统的离散化脉冲传递函数线性离散控制
系统的分析与计算
4) 非线性系统的分析
相平面法描述函数法
5) 线性连续控制系统的综合
PID 控制规律控制系统的校正线性系统的状态空间综合法
三、试卷结构考试时间:180 分钟,满分150 分。
题型结构
简答题( 20 分) 分析、计算题( 100 分) 理论题( 30 分)
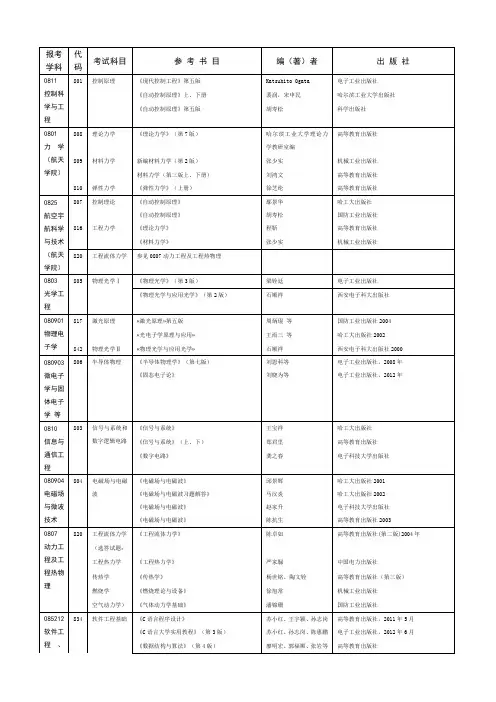
四、参考书目
(1) 裴润,宋申民,《自动控制原理》(上、下册)修订版,哈尔滨工业大学出版社,2011
(2) 胡寿松,《自动控制原理》第六版,科学出版社,2013
(3) Katsuhito Ogata ,《现代控制工程》第五版,电子工业出版社,2011。
哈工大自动控制原理
哈尔滨工业大学自动控制原理(Automatic Control Principles)
是自动控制学科的基础课程之一,旨在介绍自动控制系统的基本原理和方法。
该课程主要内容包括以下几个方面:
1. 控制系统基本概念:介绍控制系统的定义、组成、分类和基本概念,如输入、输出、控制信号和误差等。
2. 控制系统数学模型:介绍控制系统的数学建模方法,包括线性时不变系统和非线性系统的建模方法。
3. 闭环控制原理:介绍闭环控制系统的原理,包括控制器、传感器、执行器和反馈环节的设计与分析。
4. 开环控制原理:介绍开环控制系统的原理,包括传感器、执行器和开环控制器的设计与分析。
5. 稳定性分析与设计:介绍控制系统的稳定性分析方法,包括根轨迹法、频率响应法和Lyapunov稳定性分析法等。
6. 控制系统设计:介绍控制系统的设计方法,包括根轨迹设计、频域设计和状态空间设计等。
7. 多变量控制系统:介绍多变量控制系统的建模、分析和设计方法。
哈尔滨工业大学的自动控制原理课程旨在培养学生对自动控制系统的基本理论和方法的掌握,为进一步学习自动控制专业课程和进行科学研究打下坚实基础。