空间矢量PWM的实现
- 格式:pdf
- 大小:398.32 KB
- 文档页数:9
SVPWM的原理和法则推导和控制算法详细讲解SVPWM(Space Vector Pulse Width Modulation)是一种三相不对称多电平PWM调制技术。
其原理是将三相电压转换为空间矢量信号,通过调制的方式控制逆变器输出电压,以实现对三相电机的控制。
下面将详细介绍SVPWM的原理、法则推导以及控制算法。
一、原理:SVPWM的原理在于将三相电压分解为两相,即垂直于矢量且相互垂直的两个分量,直流坐标分量和交流坐标分量。
其中,直流坐标分量用于产生直流电压,交流坐标分量用于产生交流电压。
通过对直流和交流坐标的调制,可以生成所需的输出电压。
二、法则推导:1.将三相电压写成直流坐标系下的矢量形式:V_dc = V_d - 0.5 * V_a - 0.5 * V_bV_ac = sqrt(3) * (0.5 * V_a - 0.5 * V_b)2. 空间矢量信号通过电源电压和载波进行调制来生成输出电压。
其中,电源电压表示为空间矢量V。
根据配比原则,V_dc和V_ac分别表示空间矢量V沿直流和交流坐标的分量。
V = V_dc + V_ac3.根据法则推导,导出SVPWM的输出电压:V_u = 1/3 * (2 * V_dc + V_ac)V_v = 1/3 * (-V_dc + V_ac)V_w = 1/3 * (-V_dc - V_ac)三、控制算法:1. 设定目标矢量Vs,将其转换为直流坐标系分量V_dc和交流坐标系分量V_ac。
2.计算空间矢量的模长:V_m = sqrt(V_dc^2 + V_ac^2)3.计算空间矢量与各相电压矢量之间的夹角θ:θ = arctan(V_ac / V_dc)4.计算换向周期T和换相周期T1:T=(2*π*N)/ω_eT1=T/6其中,N为极对数,ω_e为电机的角速度。
5.根据目标矢量和夹角θ,确定目标矢量对应的扇区。
6.根据目标矢量和目标矢量对应的扇区,计算SVPWM的换相角度β和占空比:β=(2*π*N*θ)/3D_u = (V_m * cos(β) / V_dc) + 0.5D_v = (V_m * cos(β - (2 * π / 3)) / V_dc) + 0.5D_w=1-D_u-D_v以上步骤即为SVPWM的控制算法。
空间矢量脉宽调制技术空间矢量脉宽调制技术(SPWM)是一种广泛应用于电力电子和驱动控制系统中的调制技术。
该技术是基于对正弦波进行Pulse Width Modulation(PWM)的基础上,通过多种空间矢量变换的方式,进一步提高功率电子器件的使用效率和控制精度。
本文旨在探究SPWM 技术的原理、发展历程及在实际应用中的优点和挑战。
一、SPWM技术的原理SPWM技术是一种通过调制信号的脉宽来控制功率开关器件的电力电子调制技术,其原理基于三相交流电源。
具体而言,SPWM技术涉及到对正弦波电源进行采样、比较、引出调制波等操作,最终生成宽度可调的PWM信号,用于控制功率开关器件的通断。
在SPWM技术中,生成一个矢量的宽度可以通过比较采样信号和调制信号来实现。
采样信号是正弦波电源经过采样转换后得到的“参照信号”,调制信号则是通过多种空间矢量变换技术得到的“控制信号”。
1. 采样:将三相电源的正弦波进行采样转换,得到由三个方向的“参照信号”。
2. 比较:将每个参照信号与对应的调制信号进行比较,得到每个周期内相应的PWM信号。
3. 引出调制波:通过正弦波调制,将参照信号转换成空间矢量,得到三个方向的“控制信号”。
4. 生成PWM信号:根据每个周期内相应的控制信号,生成宽度可调的PWM信号,用于控制功率开关器件的通断。
SPWM技术的发展历程可以追溯到上世纪70年代末,当时由于功率开关器件的普及,PWM技术成为电力电子调制技术的主流技术。
SPWM技术的发展缘起于对传统PWM技术中影响系统效率和精度的限制的挑战。
传统PWM技术在控制效率和精度上有着天然的限制,因此SPWM技术的出现实际是为了进一步提高系统的效率和精度。
在此基础上,SPWM技术一步步得到完善。
90年代初期,国外开始出现一些SPWM技术的研究成果,如空间矢量调制技术(SVM)、对称空间矢量调制技术(SSVM)等。
此后,国内也相继出现大量研究SPWM技术的文献。
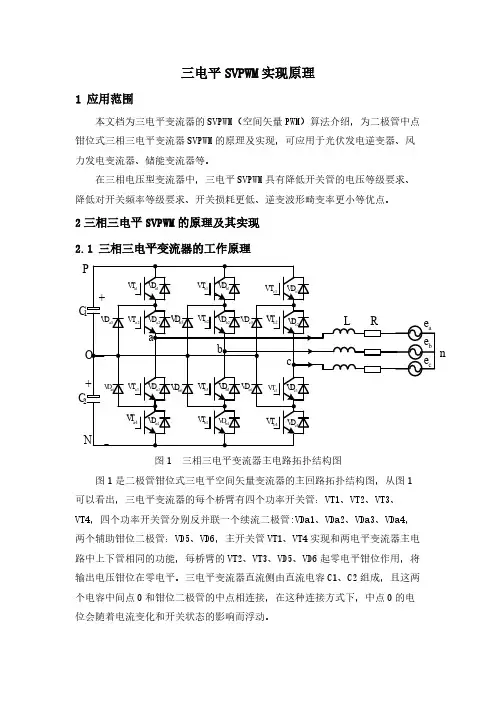
空间电压矢量控制PWM
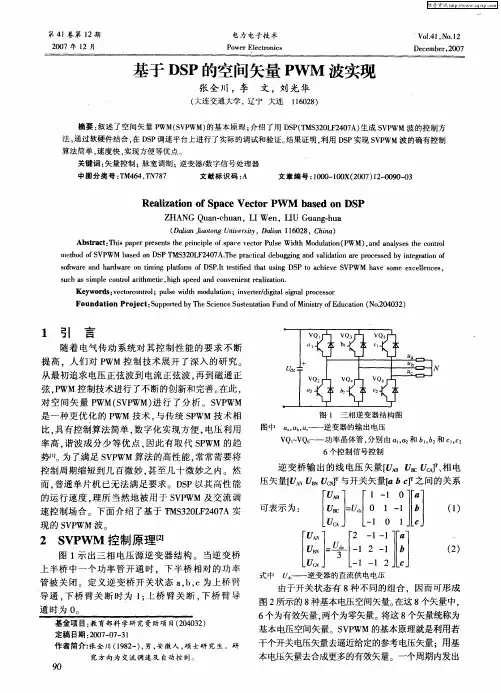
空间电压矢量控制PWM(SVPWM)也叫磁通正弦PWM法.它以三相波形整体生成效果为前提,以逼近电机气隙的理想圆形旋转磁场轨迹为目的,用逆变器不同的开关模式所产生的实际磁通去逼近基准圆磁通,由它们的比较结果决定逆变器的开关,形成PWM波形.此法从电动机的角度出发,把逆变器和电机看作一个整体,以内切多边形逼近圆的方式进行控制,使电机获得幅值恒定的圆形磁场(正弦磁通).
具体方法又分为磁通开环式和磁通闭环式.磁通开环法用两个非零矢量和一个零矢量合成一个等效的电压矢量,若采样时间足够小,可合成任意电压矢量.此法输出电压比正弦波调制时提高15%,谐波电流有效值之和接近最小.磁通闭环式引
入磁通反馈,控制磁通的大小和变化的速度.在比较估算磁通和给定磁通后,根据误差决定产生下一个电压矢量,形成PWM波形.这种方法克服了磁通开环法的不足,解决了电机低速时,定子电阻影响大的问题,减小了电机的脉动和噪音.但由于未引入转矩的调节,系统性能没有得到根本性的改善.。
几种PWM控制方法PWM(脉宽调制)是一种广泛应用于电子设备中的控制方法,通过控制信号的脉冲宽度来改变电路或设备的输出功率。
以下是几种常见的PWM 控制方法:1.定频PWM控制定频PWM控制是一种简单而常见的PWM控制方法,通过将固定频率的脉冲信号与一个可变的占空比相乘来实现控制。
脉冲的高电平时间代表设备处于工作状态的时间比例,而低电平时间代表设备处于停止状态的时间比例。
定频PWM控制可通过调整脉冲的占空比来改变输出功率,但频率固定不变。
2.双边PWM控制双边PWM控制是一种可调节频率和占空比的PWM控制方法。
与定频PWM不同的是,双边PWM控制可以根据需求调整脉冲的频率和占空比。
通过改变脉冲的频率和占空比,可以获得较高的精度和更灵活的控制效果。
3.单脉冲宽度调制(SPWM)单脉冲宽度调制是一种通过调整脉冲宽度的PWM控制方法。
与常规PWM不同的是,SPWM控制中只有一个脉冲被发送,其宽度和位置可以根据需求进行调整。
SPWM控制常用于逆变器和交流驱动器等高精度要求的应用,可以实现比其他PWM控制方法更精确的波形控制。
4.多级PWM控制多级PWM控制是一种在多个层次上进行PWM调制的控制方法。
通过将一系列的PWM信号级联起来,每个PWM信号的频率和占空比不同,可以实现更高精度和更复杂的波形控制。
多级PWM控制常用于高性能电机驱动器、中央处理器(CPU)和功率放大器等需要高精度信号处理的应用。
5.空间矢量调制(SVPWM)空间矢量调制是一种通过调整电压矢量的方向和大小来实现PWM控制的方法。
SVPWM通过控制电压矢量之间的切换来生成输出波形,可以实现较高的电压和电流控制精度。
空间矢量调制常用于三相逆变器、电子制动器和无刷直流电机等高功率应用中,可以实现高质量的输出波形。
6.滑模PWM控制滑模PWM控制是一种通过添加滑模调节器来实现PWM控制的方法。
滑模调节器可以通过反馈控制来实现系统的快速响应和鲁棒性,从而实现更好的控制效果。

电机矢量控制原理
电机矢量控制是一种基于电机空间矢量理论的控制方法,旨在实现精确的电机控制和高效的能量转换。
其原理是通过精确控制电机的电压和电流矢量,使电机能够运行在理想状态下。
电机矢量控制的关键是通过独立控制电机的磁场和转矩两个矢量,从而实现对电机速度、转矩和定位的精确控制。
磁场矢量可以通过控制电机的磁通和磁场方向来实现,而转矩矢量可以通过控制电机的驱动力矩和速度来实现。
实现电机矢量控制的关键是通过空间矢量PWM技术来控制电
机的相电流。
在每个电气周期内,根据电机的磁场和转矩需求,计算出相应的磁场和转矩矢量,然后将其分解为两个正交矢量,分别控制电机的磁通和电流。
具体来说,磁通矢量控制是通过控制电机的磁通大小和方向来实现的。
在每个电气周期内,根据电机的磁通需求,计算出磁通矢量的大小和方向,然后将其转换为对应的电压指令,通过PWM技术控制电机的相电压,从而实现磁通的控制。
转矩矢量控制是通过控制电机的驱动力矩和速度来实现的。
在每个电气周期内,根据电机的转矩需求,计算出转矩矢量的大小和方向,然后将其转换为对应的电流指令,通过PWM技术
控制电机的相电流,从而实现转矩的控制。
最后,将磁通矢量和转矩矢量重新合成为一个矢量,将其转换为对应的电压和电流指令,通过PWM技术施加于电机的相电
压和电流,从而实现电机的精确控制。
总的来说,电机矢量控制通过独立控制电机的磁场和转矩两个矢量,从而实现对电机速度、转矩和定位的精确控制。
其核心原理是通过空间矢量PWM技术控制电机的相电流,从而实现对电机磁通和转矩的控制,以提高电机的性能和效率。

五段式SVPWM(Space Vector Pulse Width Modulation,空间矢量脉宽调制)原理是在传统的电压调制基础上,引入一个滑窗,通过对窗口内电压幅值的调节,实现对输出电压波形的控制。
五段式SVPWM也被称为DPWM(Discontinuous PWM,不连续脉宽调制),因为它在一个开关周期内只插入了一个零矢量,导致PWM波形的不连续性。
五段式SVPWM的基本原理是将一个开关周期分为五个阶段,每个阶段对应不同的电压矢量。
通过合理地选择这些电压矢量和它们的作用时间,可以合成期望的输出电压矢量。
在五段式SVPWM中,通常使用两个相邻的有效电压矢量和两个零矢量来合成期望的输出电压矢量。
有效电压矢量位于电压空间矢量图的六边形顶点上,而零矢量位于六边形的中心点。
根据所需的输出电压矢量的位置和幅值,可以确定有效电压矢量的作用时间和顺序。
在五段式SVPWM的实现中,需要计算每个阶段的有效电压矢量的作用时间,并生成相应的PWM波形。
这些PWM波形将控制逆变器的开关管,从而合成期望的输出电压波形。
需要注意的是,五段式SVPWM由于在一个开关周期内只插入了一个零矢量,会导致相电压的谐波成分较高。
此外,不同扇区内对零矢量的不同选择会产生不同的DPWM变种,每个变种对开关管的损耗和谐波性能都会有所影响。
SVPWM控制原理SVPWM(Space Vector Pulse Width Modulation)是一种用于控制三相交流电机的调制技术。
它是一种基于矢量控制的PWM技术,通过合理地选择和控制逆变器输出电压的矢量,可以实现较高的电机效率和性能。
SVPWM的原理是基于三相交流电机在d-q坐标系下的数学模型。
在d-q坐标系下,电机的空间矢量可以通过矢量的大小和角度来表示。
根据电机的控制需求,可以通过调节空间矢量来实现不同的运动控制,比如调节转速、力矩等。
具体来说,SVPWM的操作步骤如下:1.选择一个合适的矢量参考,该矢量参考可以是电机速度、电机转矩或其他控制目标。
2.将矢量参考通过逆变器的逻辑控制单元转换为电压命令。
3.根据电压命令,计算得到基波电压的大小和方向。
由于基波电压的大小是根据矢量参考调节的,因此可以实现对电机转速和转矩的控制。
4.将计算得到的基波电压旋转到d-q坐标系中,得到对应的α轴和β轴电压。
5.将对应的α轴和β轴电压通过逆变器的PWM信号生成模块转换为PWM信号。
6.将PWM信号送入逆变器,驱动三相交流电机。
1.可以实现高效率的电机控制。
SVPWM通过合理地选择和控制逆变器输出电压的矢量,可以最大限度地减小能量损失,提高电机的效率。
2.可以实现更好的动态性能。
SVPWM可以通过调节矢量参考来实现对电机速度和转矩的精确控制,具有较好的动态响应特性。
3.减小电机谐波和震荡。
SVPWM可以将逆变器输出电压分解为基波和三次谐波电压,并通过控制基波电压的大小和方向来控制电机运动,从而减小谐波和震荡。
然而,SVPWM也存在一些问题和挑战。
首先,SVPWM的控制算法相对较复杂,需要进行大量的计算和变换,对控制器的计算能力和运算速度要求较高。
其次,在实际应用中,不同类型的电机(如感应电机、永磁同步电机等)对SVPWM的控制参数和算法有较大的要求和差异性。
因此,在具体应用中,需要根据电机的特性和需求进行适当的调整和优化。
svpwm的在单片机中的简单写法
空间矢量脉宽调制(SVPWM)是一种用于控制电机的高效PWM策略。
在单片机中实现SVPWM需要一些计算和编程技巧。
以下是一个简单的SVPWM实现步骤:
1.确定参考电压矢量:首先,你需要确定参考电压矢量在电压空间矢量图中的位置。
这通常涉及到将参考电压矢量映射到六个基本区域中的一个。
2.计算两个有效电压矢量的作用时间:根据参考电压矢量所在的区域,选择两个相邻的有效电压矢量。
计算这两个有效电压矢量的作用时间,通常用占空比来表示。
3.计算零电压矢量的作用时间:零电压矢量用于在两个有效电压矢量之间插入适当的“零”时间段,以平滑地过渡并减少电磁干扰(EMI)。
计算零电压矢量的作用时间,以确保平滑的过渡。
4.生成PWM信号:根据计算出的有效电压矢量和零电压矢量的作用时间,生成相应的PWM信号。
这些PWM信号将用于控制电机驱动器的开关状态,以产生所需的电压矢量。
5.编程实现:使用单片机编程语言(如C或汇编)实现上述步骤。
这可能包括定义和初始化必要的变量,进行数学计算,以及配置PWM模块以生成所需的PWM信号。
6.测试和调试:在实际应用之前,进行充分的测试和调试是必要的。
这包括验证SVPWM算法的正确性,确保电机按照预期运行,并调整参数以优化性能。
请注意,以上是一个简化的SVPWM实现过程。
实际应用中可能需要更复杂的算法和优化措施,具体取决于电机的类型、控制要求和单片机的性能。