第二章 ucos-ii工作原理
- 格式:ppt
- 大小:3.04 MB
- 文档页数:200
UC/OS-II学习笔记之——任务切换是怎样实现的问题是,o Uc/OS-II如何切换任务?通过任务调度器OS_Sched(),那么谁在调用这个函数?o CPU在这里肯定有作用,因为任务切换必然涉及到CPU寄存器的入栈和出栈,那么这一块工作是如何完成的?书上讲:为了做到任务切换,运行OS_TASK_SW(),人为模仿一次中断。
中断服务子程序或陷阱处理(trap hardler),也称作事故处理(exception handler),必须给汇编语言函数OSCtxSw()提供中断向量[1.92]。
那么,“人为模仿一次中断”是什么意思?是指:OS_TASK_SW()触发了一个中断,由中断完成了任务切换?阅读源代码,查找答案……#define OS_TASK_SW()OSCtxSw()//这是一个宏调用,定义在os_cpu.h,Os_cpu_a.asm中定义了OSCtxSwNVIC_INT_CTRL EQU0xE000ED04NVIC_PENDSVSET EQU0x10000000;******************************************************************************;PERFORM A CONTEXT SWITCH(From task level);void OSCtxSw(void);;Note(s):1)OSCtxSw()is called when OS wants to perform a task context switch.This function;triggers the PendSV exception which is where the real work is done.;******************************************************************************OSCtxSwLDR R0,=NVIC_INT_CTRL;Trigger the PendSV exception(causes context switch) LDR R1,=NVIC_PENDSVSETSTR R1,[R0]BX LR注释说明该段汇编代码触发了一个PendSV的异常。
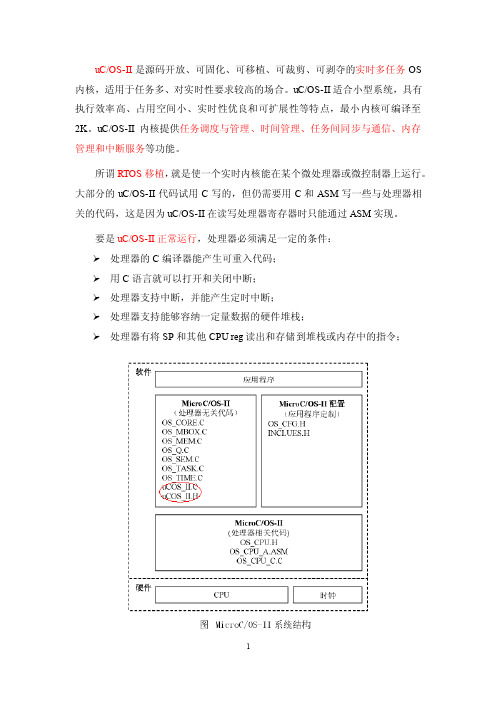
uC/OS-II是源码开放、可固化、可移植、可裁剪、可剥夺的实时多任务OS 内核,适用于任务多、对实时性要求较高的场合。
uC/OS-II适合小型系统,具有执行效率高、占用空间小、实时性优良和可扩展性等特点,最小内核可编译至2K。
uC/OS-II内核提供任务调度与管理、时间管理、任务间同步与通信、内存管理和中断服务等功能。
所谓RTOS移植,就是使一个实时内核能在某个微处理器或微控制器上运行。
大部分的uC/OS-II代码试用C写的,但仍需要用C和ASM写一些与处理器相关的代码,这是因为uC/OS-II在读写处理器寄存器时只能通过ASM实现。
要是uC/OS-II正常运行,处理器必须满足一定的条件:处理器的C编译器能产生可重入代码;用C语言就可以打开和关闭中断;处理器支持中断,并能产生定时中断;处理器支持能够容纳一定量数据的硬件堆栈;处理器有将SP和其他CPU reg读出和存储到堆栈或内存中的指令;uC/OS-II移植工作主要包括以下三个方面的内容:(1)修改与处理器核编译器相关的代码:主要在includes.h中,修改数据类型定义说明,OS_ENTER_CRITICAL()、OS_EXIT_CRITICAL()和堆栈增长方向定义OS_STK_GROWTH。
(2)用C语言编写10个移植相关的函数:主要在OS_CPU_C.C中,包括堆栈初始化OSTaskStkInit()和各种回调函数。
(3)编写4个汇编语言函数:主要在OS_CPU_A.ASM中,包括:_OSTickISR //时钟中断处理函数_OSIntCtxSW //从ISR中调用的任务切换函数_OSCtxSW //从任务中调用的任务切换函数_OSStartHighRdy //启动最高优先级的任务uC/OS-II移植的关键问题:(1)临界区访问:uC/OS-II需要先禁止中断再访问代码临界段,并且在访问完毕后重新允许中断,这就使得uC/OS-II能够保护临界段代码免受多任务或ISR的破坏。
实验一、任务创建与删除1、uC/OS-II介绍对于操作系统的学习,创建任务和删除任务是最为基础的工作,uC/OS-II以源代码的形式发布,是开源软件, 但并不意味着它是免费软件。
可以将其用于教学和私下研究;但是如果将其用于商业用途,那么必须通过Micrium获得商用许可。
uC/OS-II属于抢占式内核,最多可以支持64个任务,分别对应优先级0~63,每个任务只能对应唯一的优先级,其中0为最高优先级。
63为最低级,系统保留了4个最高优先级的任务和4个最低优先级的任务,所有用户可以使用的任务数有56个。
uC/OS-II提供了任务管理的各种函数调用,包括创建任务,删除任务,改变任务的优先级,任务挂起和恢复等。
系统初始化时会自动产生两个任务:一个是空闲任务,它的优先级最低,该任务仅给一个整型变量做累加运算;另一个是系统任务,它的优先级为次低,该任务负责统计当前cpu的利用率。
μC/OS-II可管理多达63个应用任务,并可以提供如下服务,本章将针对以下服务分别以例程的方式来介绍1)信号量2)互斥信号量3)事件标识4)消息邮箱5)消息队列6)任务管理7)固定大小内存块管理8)时间管理2、任务创建与删除想让uC/OS-II管理用户的任务,用户必须要先建立任务,在开始多任务调度(即调用OSStart())前,用户必须建立至少一个任务。
uC/OS-II提供了两个函数来创建任务:OSTask Create()或OSTaskCreateExt()。
可以使用其中任意一个即可,其函数原型如下:INT8U OSTaskCreate (void (*task)(void *pd), void *pdata, OS_STK *ptos, INT8U pri o)INT8U OSTaskCreateExt (void(*task)(void *pd),void *pdata,SD_STK *ptos,INT8U prio, INT16U id,OS_STK *pbos,INT32U stk_size, void *pext,INT16U opt)task:任务代码指针pdata:任务的参数指针ptos:任务的堆栈的栈顶指针prio:任务优先级id:任务特殊的标识符(uC/OS-II中还未使用)pbos:任务的堆栈栈底的指针(用于堆栈检验)stk_size:堆栈成员数目的容量(宽度为4字节)pext:指向用户附加的数据域的指针opt:是否允许堆栈检验,是否将堆栈清零,任务是否要进行浮点操作等等删除任务,是说任务将返回并处于休眠状态,任务的代码不再被uC/OS-II调用,而不是删除任务代码。

UCOSII操作系统课程设计一、课程目标知识目标:1. 理解UCOSII操作系统的基本原理和核心概念,包括任务管理、时间管理、通信与同步机制;2. 掌握UCOSII的移植方法和配置过程,学会在不同硬件平台上搭建UCOSII 操作系统环境;3. 学会使用UCOSII提供的API进行多任务编程,了解实时操作系统的任务调度和资源管理策略。
技能目标:1. 能够运用C语言在UCOSII环境下编写多任务应用程序,实现任务间的同步与通信;2. 能够分析并解决实际嵌入式系统开发中与操作系统相关的问题,提高系统稳定性和可靠性;3. 掌握UCOSII调试技巧,能够运用调试工具对操作系统运行状态进行跟踪和分析。
情感态度价值观目标:1. 培养学生对操作系统知识的好奇心和探索精神,激发学习兴趣和热情;2. 培养学生具备良好的团队合作精神和沟通能力,提高解决实际问题的能力;3. 增强学生的创新意识,鼓励他们在实际项目中积极尝试和应用所学知识。
课程性质:本课程为高年级专业课,以实际应用为导向,注重理论与实践相结合。
学生特点:学生已具备一定的C语言编程基础和嵌入式系统知识,具有较强的学习能力和实践能力。
教学要求:教师需采用项目驱动教学法,引导学生通过实际案例掌握UCOSII 操作系统的应用与开发。
在教学过程中,关注学生的个体差异,提供个性化指导,确保课程目标的实现。
同时,注重培养学生的自主学习能力和创新能力,为将来的职业发展打下坚实基础。
二、教学内容1. UCOSII操作系统概述:介绍实时操作系统的基本概念、特点及应用场景,引出UCOSII的背景、架构和优势。
教材章节:第一章 实时操作系统概述2. UCOSII内核原理:讲解UCOSII的核心组件,包括任务管理、时间管理、通信与同步机制等。
教材章节:第二章 UCOSII内核原理3. UCOSII移植与配置:介绍在不同硬件平台上移植和配置UCOSII的方法,以实际案例为例进行讲解。
摘要:μC/OS-II是一种适用于嵌入式系统的抢占式实时多任务操作系统,开放源代码,便于学习和使用。
介绍μC/OS-II在任务级和中断级的任务切换原理,以及这一操作系统基于嵌入式系统的对于中断的处理;相对于内存资源较少的单片机,着重讨论一种优化的实用堆栈格式和切换形式,以提高资源的利用率;结合MSP430单片机,做具体的分析。
关键词:实时多任务操作系统μC/OS MSP430 中断堆栈引言在嵌入式操作系统领域,由Jean J. Labrosse开发的μC/OS,由于开放源代码和强大而稳定的功能,曾经一度在嵌入式系统领域引起强烈反响。
而其本人也早已成为了嵌入式系统会议(美国)的顾问委员会的成员。
不管是对于初学者,还是有经验的工程师,μC/OS开放源代码的方式使其不但知其然,还知其所以然。
通过对于系统内部结构的深入了解,能更加方便地进行开发和调试;并且在这种条件下,完全可以按照设计要求进行合理的裁减、扩充、配置和移植。
通常,购买RTOS往往需要一大笔资金,使得一般的学习者望而却步;而μC/OS对于学校研究完全免费,只有在应用于盈利项目时才需要支付少量的版权费,特别适合一般使用者的学习、研究和开发。
自1992 第1版问世以来,已有成千上万的开发者把它成功地应用于各种系统,安全性和稳定性已经得到认证,现已经通过美国FAA认证。
1 μC/OS-II的几大组成部分μC/OS-II可以大致分成核心、任务处理、时间处理、任务同步与通信,CPU的移植等5个部分。
核心部分(OSCore.c) 是操作系统的处理核心,包括操作系统初始化、操作系统运行、中断进出的前导、时钟节拍、任务调度、事件处理等多部分。
能够维持系统基本工作的部分都在这里。
任务处理部分(OSTask.c)任务处理部分中的内容都是与任务的操作密切相关的。
包括任务的建立、删除、挂起、恢复等等。
因为μC/OS-II是以任务为基本单位调度的,所以这部分内容也相当重要。
ucos-ii的工作原理自我感觉对ucos-ii已经很熟悉了,但是在一次面试的时候,被问及ucos的工作原理,却不知道怎么叙说,从那叙说,恨啊现在网络上搜了一篇,感觉写的蛮好的,借用一下,留作以后回顾(具体作者不详,所以无法署其姓名,望原创见谅)。
uC/OS-II是一种基于优先级的可抢先的硬实时内核。
要实现多任务机制,那么目标CPU必须具备一种在运行期更改PC 的途径,否则无法做到切换。
不幸的是,直接设置PC指针,目前还没有哪个CPU支持这样的指令。
但是一般CPU都允许通过类似JMP,CALL这样的指令来间接的修改PC。
我们的多任务机制的实现也正是基于这个出发点。
事实上,我们使用CALL指令或者软中断指令来修改PC,主要是软中断。
但在一些CPU上,并不存在软中断这样的概念,所以,我们在那些CPU上,使用几条PUSH指令加上一条CALL指令来模拟一次软中断的发生。
在uC/OS-II里,每个任务都有一个任务控制块(Task Control Block),这是一个比较复杂的数据结构。
在任务控制快的偏移为0的地方,存储着一个指针,它记录了所属任务的专用堆栈地址。
事实上,在uC/OS-II内,每个任务都有自己的专用堆栈,彼此之间不能侵犯。
这点要求程序员在他们的程序中保证。
一般的做法是把他们申明成静态数组。
而且要申明成OS_STK类型。
当任务有了自己的堆栈,那么就可以将每一个任务堆栈当前位置,记录到前面谈到的任务控制快偏移为0的地方。
以后每当发生任务切换,系统必然会先进入一个中断,这一般是通过软中断或者时钟中断实现。
然后系统会先把当前任务的堆栈地址保存起来,紧接着恢复要切换的任务的堆栈地址。
由于所要切换的任务堆栈里一定也存的是地址(还记得我们前面说过的,每当发生任务切换,系统必然会先进入一个中断,而一旦中断CPU就会把地址压入堆栈),这样,就达到了修改PC为下一个任务的地址的目的。
ucos II 任务间通信详解ucos II 任务间通信之一 :全局变量任务创建好了之后,只是完成了系统编程的一小步,更为重要的是任务间的通信。
比如在mcu21的项目里,有通信任务,有液晶显示任务,有控制任务。
控制任务需要用到通信任务接受到的数据,液晶显示任务也显示控制任务的数据。
这就需要用到任务间的通信了。
Mcu21总结了一下,在ucos II 里任务间通信可以采用以下几种方式。
z共享全局变量,这是最快捷有效的方式,实现这种通信可以采用以下两种方式:一是利用宏OS_ENTER_CRITICAL()和OS_EXIT_CRITICAL()来关闭中断和打开中断,二是利用函数OSSchedLock()和OSSchedUnlock()对μC/OS‐II中的任务调度函数上锁和开锁.z使用信号量z使用邮箱z使用消息队列下面介绍下共享全局变量的实现过程。
(1)宏OS_ENTER_CRITICAL()和OS_EXIT_CRITICAL()是在移植ucos II过程中由用户定义的。
在os_cpu.h这个文件中。
代码如下,这部分代码的作用是关,开中断,具体和CPU有关。
当我们调用OS_ENTER_CRITICAL()时,系统中断被关闭,我们知道,任务切换时基于定时器中断的,当系统中断别关闭时,其它中断,包括定时器中断也就被关闭,任务切换也不可能发生,所以确保在访问变量的时候,不会有其它的任务或中断也在同时访问这个变量。
这两个宏非常好用,在mcu21的项目里经常用到。
尤其在中断处理函数里面。
因为现在的很多CPU是支持中断嵌套的,为了防止中断执行的时候不被其它的中断打断,就可以调用这两个宏。
(2)第二种方法是给任务调度函数上锁,开锁。
这种方法和使用宏OS_ENTER_CRITICAL()和OS_EXIT_CRITICAL()最大的区别是:中断是可以执行的。
尽管不执行任务切换,变量依然有可以被中断函数访问。
给任务调度器上锁的函数如下void OSSchedLock (void){if (OSRunning == TRUE) {OS_ENTER_CRITICAL();OSLockNesting++;OS_EXIT_CRITICAL();}}给任务调度器解锁的函数如下void OSSchedUnlock (void){if (OSRunning == TRUE) {OS_ENTER_CRITICAL();if (OSLockNesting > 0) {OSLockNesting‐‐;if ((OSLockNesting | OSIntNesting) == 0) { (1)OS_EXIT_CRITICAL();OSSched(); (2)} else {OS_EXIT_CRITICAL();}} else {OS_EXIT_CRITICAL();}}}它实现的原理大致是这样的。