经典控制理论——第五章2new资料
- 格式:ppt
- 大小:1.73 MB
- 文档页数:102

第五章 状态反馈和状态观测器3-5-1 已知系统结构图如图题3-5-1图所示。
(1)写出系统状态空间表达式;(2)试设计一个状态反馈矩阵,将闭环极点特征值配置在j 53±-上。
)(t y题3-5-1图【解】:方法一:根据系统结构直接设状态变量如题3-5-1图所示,写状态空间表达式:[]x y u x x 10112101=⎥⎦⎤⎢⎣⎡-+⎥⎦⎤⎢⎣⎡--= 23111=⎥⎦⎤⎢⎣⎡--=c c U rank U系统能控,可以设计状态反馈阵。
设状态反馈阵为][21k k K = 状态反馈控制规律为:Kx r u -= 求希望特征多项式:34625)3()(*22++=++=s s s s f求加入反馈后的系统特征多项式:)22()3()(1212k s k k s bK A sI s f ++-++=+-=依据极点配置的定义求反馈矩阵:]1316[131634)22(6)3(21112=⎩⎨⎧==⇒⎩⎨⎧=+=+-K k k k k k 方法二:[][][]1316)346(311110)(*10211=++⎥⎦⎤⎢⎣⎡--==--I A A A f U K c方法三:(若不考虑原受控对象的结构,仅从配置极点位置的角度出发)求系统传递函数写出能控标准型:2321)111()()(2++-=+-+=s s ss s s U s Y []xy u x x 10103210-=⎥⎦⎤⎢⎣⎡+⎥⎦⎤⎢⎣⎡--= 求系统希望特征多项式:34625)3()(*22++=++=s s s s f求状态反馈矩阵K ~:[][][]33236234~21=--==k k K [][][][]5.05.031111010111=⎥⎦⎤⎢⎣⎡--==--Ab bP⎥⎦⎤⎢⎣⎡-=⎥⎦⎤⎢⎣⎡=105.05.011A P P P []1316~==P K K依据系统传递函数写出能控标准型ss s s s s s U s Y 2310)2)(1(10)()(23++=++= []x y u x x 0010100320100010=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--=求系统希望特征多项式:464]1)1)[(2()(*232+++=+++=s s s s s s f求状态反馈矩阵:[][][]144342604321=---==k k k K 。
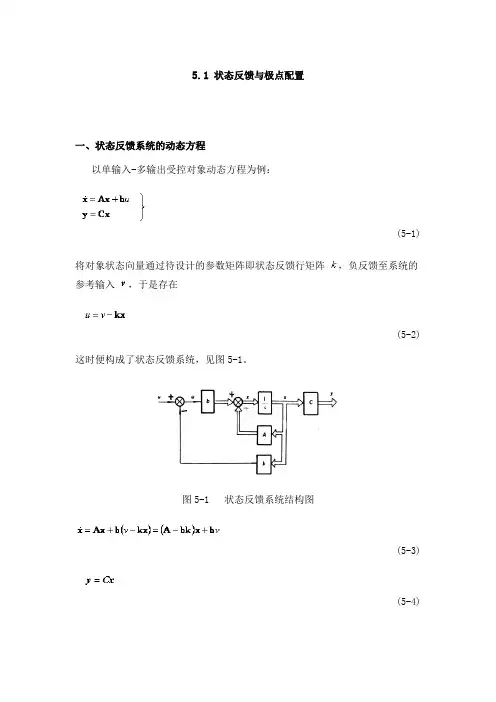
5.1状态反馈与极点配置一、状态反馈系统的动态方程以单输入-多输出受控对象动态方程为例:(5-1)将对象状态向量通过待设计的参数矩阵即状态反馈行矩阵,负反馈至系统的参考输入,于是存在(5-2)这时便构成了状态反馈系统,见图5-1。
图5-1 状态反馈系统结构图(5-3)(5-4)式中v为纯量,为维向量,为维矩阵,为维向量,为维行矩阵,为维向量,为维矩阵。
为闭环状态阵,为闭环特征多项式。
二、用状态反馈使闭环极点配置在任意位置上的充要条件是:受控对象能控证明若式(5-1)所示对象可控,定可通过变换化为能控标准形,有若在变换后的状态空间内引维状态反馈矩阵:(5-5)其中分别为由状态变量引出的反馈系数,则变换后的状态反馈系统动态方程为:(5-6)(5-7)式中(5-8)该式与仍为能控标准形,故引入状态反馈后,系统能控性不变。
特征方程为:(5-9)显见,任意选择阵的个元素,可使特征方程的个系数满足规定要求,能保证特征值(即闭环极点)任意配置。
将逆变换代入式(5-6),可求出原状态空间内的状态反馈系统状态方程:(5-10)与式(5-3)相比,式(5-10)所示对象应引入状态反馈阵为:(5-11)需指出,当受控对象可控时,若不具有能控标准形形式,并不必象如上证明那样去化为能控标准形,只要直接计算状态反馈系统闭环特征多项式,这时,其系数为的函数,与给定极点的特征多项式系数相比较,便可确定。
能控的多输入-多输出系统,经如上类似分析可知,实现闭环极点任意配置的状态反馈阵K为维。
若受控对象不稳定,只要有能控性,完全可由状态反馈配置极点使系统稳定。
状态变量受控情况下,引入状态反馈表示增加一条反馈通路,它能改变反馈所包围环节的传递特性,即通过改变局部回路的极点来改变闭环极点配置。
不能控状态变量与控制量无关,即使引入状态反馈,对闭环极点位置也不会产生任何影响,这是因为传递函数只与系统能控、能观测部分有关的缘故。
若不能控状态变量是稳定的状态变量,那么系统还是能稳定的,否则,系统不稳定。
Automatic Control Theory自动控制理论第四章 线性系统的根轨迹法根轨迹法是一种图解方法,它是经典控制理论中对系统进行分析和综合的基本方法之一。
由于根轨迹图直观地描述了系统特征方程的根(即系统的闭环极点)在s 平面上的分布,因此,用根轨迹法分析自动控制系统十分方便,特别是对于高阶系统和多回路系统,应用根轨迹法比用其他方法更为方便,因此在工程实践中获得了广泛应用。
1、根轨迹的基本概念闭环系统的稳定性取决于闭环系统的极点分布,其它性能取决于其零极点分布。
因此,可以用系统的零极点分布来间接研究控制系统的性能。
伊万思在1948年提出了一种在复平面上由开环零极点确定闭环零极点的图解方法——根轨迹法。
将开环系统的某一个参数(比如开环放大系数)的全部值与闭环特征根的关系表示在一张图上。
根轨迹定义开环系统传递函数的某一个参数从零变到无穷时,闭环系统特征方程的根在复平面上变化的轨迹。
研究根轨迹的目的:分析系统的各种性能(稳定性、动态和稳态性能) 相关术语:*01210121()()()()()()()()()()mim i nn jj s z b s z s z s z G s H s K a s p s p s p s p ==----==----∏∏❖ 开环零点:指系统开环传递函数中分子多项式方程的根 ❖ 开环极点:指系统开环传递函数中分母多项式方程的根 ❖ 根轨迹增益:K *为开环系统根轨迹增益❖ 闭环零点:指系统闭环传递函数中分子多项式方程的根 ❖闭环极点:指系统闭环传递函数中分母多项式方程的根1*11()()()()1()()()()nj j n mjij i G s s p G s s G s H s s p K s z ===-Φ==+-+-∏∏∏闭环零点由前向通道的零点和反馈通道的极点构成。
对于单位反馈系统,闭环零点就是开环零点。
闭环极点与开环零、极点以及根轨迹增益K*均有关。

稳定性理论5.1 外部稳定性和内部稳定性运动稳定性分为基于I/O 描述的外部稳定性和基于状态空间描述的内部稳定性。
内容包括外部稳定性内部稳定性内部稳定性和外部稳定性关系(1)外部稳定性考虑以I/O 描述的线性因果系统,假定初始条件为零(保证系统输入输出描述的唯一性),外部稳定性定义如下:(t时刻输出仅取决于t时刻及之前的输入) 定义5.1 称一个因果系统为外部稳定,如果对任意有界输入u (t ),对应输出y (t )均有界,即102(),[,]()u t t t y t ββ∀≤<∞∈∞⇒≤<∞外部稳定也称为BIBO 稳定。
(有界输入-有界输出)β为有界常数。
1范数:向量各元素绝对值之和;2范数:向量各元素平方之和的1/2次方。
性质1: 非负性;齐次性;三角不等式。
定理5.1 对零初始条件线性时变系统,t 0时刻BIBO 稳定的充分必要条件是(设H(t,τ)为系统脉冲响应矩阵,hij(t,τ)一个元) 01212(,),,,,;,,,tij t h t d i q j pττβ≤<∞==∫L L 证明:先证SISO 情形。
充分性,已知脉冲响应函数绝对可积,证明系统BIBO 稳定。
由基于脉冲响应的输出关系式,有 ττβττττττd u d u t h d u t h t y tt t t t t ∫∫∫≤⋅≤=000)()(),()(),()(因此,对任意有界输入u (t )∞<≤1β)(t u∞<≤≤⇒∫10ββττβd u t y tt )()( 即系统BIBO 稳定。
再证必要性,已知系统BIBO 稳定,反设有t 1,使得∞=∫ττd t h t t 101),(构造有界输入(分段函数)⎪⎩⎪⎨⎧<−=>+==010*******),(,),(,),(,),(sgn )(ττττt h t h t h t h t u∞===⇒∫∫τττττd t h d u t h t y tt t t 1010111),()(),()(这与系统BIBO 稳定矛盾,必要性得证。
148第五章 线性定常系统的综合控制系统的综合任务是设计控制器,寻求改善系统性能的各种控制规律,,以保证系统的各项性能指标都得到满足。
§5-1线性反馈控制系统的基本结构及其特性 控制系统是由受控对象和反馈控制器两部分构成闭环系统。
现代控制理论采用状态反馈,状态反馈能提供更丰富的状态信息和可供选择的自由度,因而使用系统容易获得更为优异的性能。
一、状态反馈状态反馈是将系统的每一个状态变量乘以相应的反馈系数,然后反馈到输入端与参考输入相加形成控制律,作为受控系统的控制输入。
如图所示,其表达式:Du CX y Bu AX X+=+= (5-1)149多输入多输出系统式中:nR X ∈,TR u ∈,mRy ∈,n n A ⨯,r n B ⨯,n m C ⨯,r m D ⨯若0=D ,则受控系统X AX Buy C X ∙⎧⎪=+⎨=⎪⎩简记为:)=(C B A ,,0∑状态反馈控制规律:u kX v =+ (5-3) 其中:v -1⨯r 维参考输入;k-n r ⨯维状态反馈系数或状态反馈增益阵。
把式(5-3)代入式(5-1)得到状态反馈闭环系统表达式()()()()X AX Bu AX B kX v AX BkX Bv A Bk X Bv y C X D u C X D kX v C X D kX D v C D k X D v∙=+=++=++=++=+=++=++=++ 若=D ,()X A Bk X Bv y CX ∙⎧⎪=++⎨=⎪⎩简记为:])[(C B Bk A k ,,+=∑闭环系统的传递函数矩阵BBk A sI C s W k 1)]([)(-+-=状态反馈阵k 的引入,并不增加系统的维数,通过k 的选择自由地改变闭环系统的特征值,从而改变系统获得所要求的性能。
二、输出反馈150输出反馈是采用输出矢量y 构成线性反馈律,如图所示,受控系统)=(D C B A ,,,0∑为:X AX Bu y C X D u∙=+=+ (5-7)=D 时为X AX Bu y C X∙=+=输出线性反馈控制律为: v Hy u += (5-9)式中:H —m r ⨯维输出反馈增益阵,对单输出系统H 为1⨯r 维列矢量。
第五章一、单项选择题1-5:D 、B 、D 、A 、B 6-10:B 、D 、C 、A 、C 11-13:D 、A 、B二、分析计算题5-1解 (a)依图:⎪⎪⎪⎩⎪⎪⎪⎨⎧+==+=++=++=2121111212111111221)1(11)()(R R C R R T C R RR R K s T s K sCR sC R R R s U s U r c ττ ωωτωωωωω11121212121)1()()()(jT j K C R R j R R C R R j R j U j U j G r c a ++=+++==(b)依图:⎩⎨⎧+==++=+++=C R R T CR s T s sCR R sCR s U s U r c )(1111)()(2122222212ττ ωωτωωωωω2221211)(11)()()(jT j C R R j C R j j U j U j G r c b ++=+++==5-2解 系统闭环传递函数为: 21)(+=Φs s 图5-76 系统结构图 频率特性:2244221)(ωωωωω+-++=+=Φj j j 幅频特性: 241)(ωω+=Φj相频特性: )2arctan()(ωωϕ-= 系统误差传递函数: ,21)(11)(++=+=Φs s s G s e则 )2arctan(arctan )(,41)(22ωωωϕωωω-=++=Φj j e e(1)当t t r 2sin )(=时,2=ω,r m =1则 ,35.081)(2==Φ=ωωj 45)22arctan()2(-=-=j ϕ4.1862arctan )2(,79.085)(2====Φ=j j e e ϕωω)452sin(35.0)2sin()2(-=-Φ=t t j r c m ss ϕ )4.182sin(79.0)2sin()2(+=-Φ=t t j r e e e m ss ϕ (2) 当 )452cos(2)30sin()(︒--︒+=t t t r 时: ⎩⎨⎧====2,21,12211m m r r ωω5.26)21arctan()1(45.055)1(-=-===Φj j ϕ 4.18)31arctan()1(63.0510)1(====Φj j e e ϕ)]2(452cos[)2()]1(30sin[)1()(j t j r j t j r t c m m s ϕϕ+-⋅Φ-++⋅Φ=)902cos(7.0)4.3sin(4.0--+=t t)]2(452cos[)2()]1(30sin[)1()(j t j r j t j r t e e e m e e m s ϕϕ+-⋅Φ-++⋅Φ=)6.262cos(58.1)4.48sin(63.0--+=t t5-4解 ()()()12G j K j K e j ==-+ωωπω=→∞00,()G j ω→∞∞=,()G j 0ϕωπ()=-2幅频特性如图解5-4(a)。