经典控制理论——第三章1
- 格式:ppt
- 大小:980.50 KB
- 文档页数:38
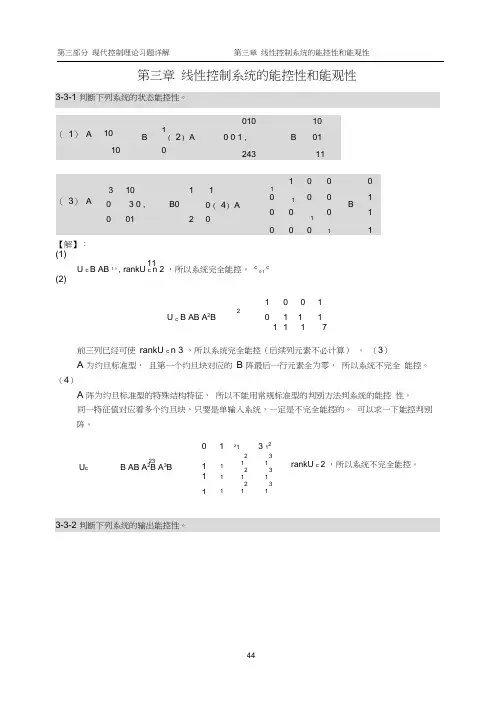
第三章 线性控制系统的能控性和能观性01010( 1) A10 1B( 2) A 0 0 1 ,B 011024311113 10 1 1( 3) A0 10 1 0 3 0 , B00 ( 4) AB0 0 11 001211【解】:(1)11U c B AB 1 1, rankU c n 2 ,所以系统完全能控。
c 0 1 c(2)10 0 1 2U c B AB A 2B1 1 11 1 17前三列已经可使 rankU c n 3 ,所以系统完全能控(后续列元素不必计算) 。
(3)A 为约旦标准型, 且第一个约旦块对应的B 阵最后一行元素全为零, 所以系统不完全 能控。
(4)A 阵为约旦标准型的特殊结构特征, 所以不能用常规标准型的判别方法判系统的能控 性。
同一特征值对应着多个约旦块,只要是单输入系统,一定是不完全能控的。
可以求一下能控判别阵。
1213 1223B AB A 2B A 3B2 3 U c1 1 12 13 1 11 12 31111rankU c 2 ,所以系统不完全能控。
3 1110 10 0 x0 3 0x 0 0ux0 01x 0u (1)0 0 12(2)61161101yxy10 0x1 10解】:1)311 已知 A 0 30,B0 001220 0 D CB CAB CA 2B 0 0 前两列已经使 rank D CBCAB110 1 0 00 , C ,D1 1 0 0 031112CA B m2, 所以系统输出能控。
(2) 系统为能控标准型,所以状态完全能控。
又因输出矩阵 状态维数 n ,所以状态能控则输出必然能控。
C 满秩,且输出维数 m 小于1 0x0 01xx1 1 (1)2 43 ; (2) 1 x 0;011y1 1xyx12 12 1 0 4 0 0x0 20xx4 0x(3);(4)0 030 1y0 1 1x y11 4x解】:1)已知 A01 00 242-3-3 判断下列系统的能观性。
第三章控制对象的动态特性习题与参考解答3-1 什么是自衡特性?具有自衡特性被控过程的系统框图有什么特点?1)在扰动作用破坏其平衡工况后,被控过程在没有外部干预的情况下自动恢复平衡的特性,称为自衡特性。
2)被控过程输出对扰动存在负反馈。
3-2 什么是单容过程和多容过程?1)单容:只有一个储蓄容量。
2)多容:有一个以上储蓄容量。
3-3 什么是控制通道和扰动通道(干扰通道)?对于不同的通道,对象的特性参数(K、T、τ)对控制有什么不同的影响?对于一个被控对象来说,输入量是扰动量和操纵变量,而输出是被控变量。
由对象的输入变量至输出变量的信号联系称为通道。
操纵变量至被控变量的信号联系称为控制通道;扰动量至被控变量的信号联系称为扰动通道。
一般来说,对于不同的通道,对象的特性参数(K、T、τ)对控制作用的影响是不同的。
对于控制通道:放大系数K大,操纵变量的变化对被控变量的影响就大,即控制作用对扰动的补偿能力强,余差也小;放大系数K小,控制作用的影响不显著,被控变量的变化缓慢。
但K太大,会使控制作用对被控变量的影响过强,使系统的稳定性下降。
在相同的控制作用下,时间常数T大,则被控变量的变化比较缓慢,此时对象比较平稳,容易进行控制,但过渡过程时间较长;若时间常数T小,则被控变量变化速度快,不易控制。
时间常数太大或太小,在控制上都将存在一定困难,因此,需根据实际情况适中考虑。
滞后时间τ的存在,使得控制作用总是落后于被控变量的变化,造成被控变量的最大偏差增大,控制质量下降。
因此,应尽量减小滞后时间τ。
对于扰动通道:放大系数K大对控制不利,因为,当扰动频繁出现且幅度较大时,被控变量的波动就会很大,使得最大偏差增大;而放大系数K小,既使扰动较大,对被控变量仍然不会产生多大影响。
时间常数T大,扰动作用比较平缓,被控变量变化较平稳,对象较易控制。
纯滞后的存在,相当于将扰动推迟τ0时间才进入系统,并不影响控制系统的品质;而容量滞后的存在,则将使阶跃扰动的影响趋于缓和,被控变量的变化相应也缓和些,因此,对系统是有利的。



第三章 线性系统的时域分析法●时域分析法在经典控制理论中的地位和作用时域分析法是三大分析方法之一,在时域中研究问题,重点讨论过渡过程的响应形式。
时域分析法的特点:1).直观、精确。
2).比较烦琐。
§3.1 概述 1. 典型输入 2. 性能指标∙稳→基本要求 ∙准→稳态要求↓ss e :∙快→过渡过程要求⎪⎩⎪⎨⎧↓↓⨯∞∞-=sp t h h t h %)()()(%σ§3.2 一阶系统的时域响应及动态性能 设系统结构图如右所示开环传递函数sKs G =)(闭环传递函数)1(11111)(T Ts Ts T K s K s K s K s -=+=+=+=+=Φλ :)(1)(时t t r =Ts sTs s T s R s s C 111)1(1)()()(+-=+=Φ=1)(,0)0( 1)(1=∞=-=∴-c c et c t TTc e T t c t T 1)0( 1)(1='='-依)(t h 特点及s t 定义有:95.01)(1=-=-s t Ts et h05.095.011=-=-s t Te305.0ln 1-==-s t TT t s 3=∴一阶系统特征根T1-=λ分布与时域响应的关系:t t h s s s s R s s C ===Φ==∙)( 11.1)().()( 02时λat e t h as s a s s a s C a +-=-+-=-==∙1)( 11)()( 时λ 例1 已知系统结构图如右其中:12.010)(+=s s G加上H K K ,0环节,使s t 减小为原来的0.1倍,且总放大倍数不变,求H K K ,0解:依题意,要使闭环系统02.00.21.0*=⨯=s t ,且闭环增益=10。
1101)101(10 1012.01012.0112.010.)(1)(.(s)0000+++=++=+++=+=Φs K K K K s K s s K s G K s G K H H H H H令 101011002.01012.00⎪⎪⎩⎪⎪⎨⎧=+==+=H H K K K K T 联立解出⎩⎨⎧==109.00K K H例2 已知某单位反馈系统的单位阶跃响应为at e t h --=1)(求(1).闭环传递函数)(s Φ;(2).单位脉冲响应;(3).开环传递函数。
Elements of Modern Control Theory主讲:董霞现代控制理论基础西安交通大学机械工程学院控制系统状态空间数学模型的建立为其状态空间分析奠定了基础。
控制系统状态空间分析的目的是要揭示系统状态的运动规律和基本特性。
通常对系统的分析可分为定量分析和定性分析两方面。
在定量分析中,对控制系统的状态变化规律进行精确研究,以确定系统输出在初始状态和外加控制下的瞬态响应特性;在定性分析中,则着重讨论对系统动态行为和综合结构起关键作用的稳定性、可控性和可测性等。
本章重点讨论的是线性定常连续系统状态方程求解的方法。
系统的稳定性、可控性和可测性将在以后各章中讨论。
本章主要内容§3.1线性定常齐次状态方程的解§3.2 矩阵指数函数§3.3 状态转移矩阵§3.4 非齐次状态方程的解§3.5 线性时变系统的运动分析§3.1线性定常齐次状态方程的解对于线性定常系统齐次状态方程可在时域内直接求解,也可以用拉普拉斯变换求解。
=+⎧⎨=+⎩&x Ax Bu y Cx Du 0()(0)t =x x 当外加输入函数u=0时,上述状态空间表达式为:=⎧⎨=⎩&x Axy Cx 0()(0)t =x x 此时的状态方程叫线性定常齐次状态方程,因系统状态的运动是在没有外加输入控制下由系统的初始状态引起的,因此控制系统的运动也称为自由运动。
(3-2)(3-1)1. 用矩阵指数函数直接求解先假设式(3-2)的解为时间t的幂级数形式,即:2012k ()k t t t t =+++++L L x b b b b (3-3)注意上式中为待定系数矩阵。
当t=0时,(1,2,)i i =L b (0)=0x b 将所设的解式(3-3)代入式(3-2)表示的方程中,可得:21212301223()k k k k t t k t t t t −+++++=+++++L L L L b b b b A b b b b 由于上式对所有的时间t都要成立,因此等式两边同幂项的系数应相等,即:,由其组成的无穷矩阵级数的和类似于纯量指数,1∑A(3-5)k kt对于线性定常齐次状态方程式(3-2)也可用拉普拉斯变换求解,它的求解方法与纯量一阶微分方程求解相似。