斜坡补偿(3842)
- 格式:pdf
- 大小:213.76 KB
- 文档页数:4
开关电源中斜坡补偿电路的分析与设计
1.引言
开关电源是利用现代电力电子技术,控制开关晶体管的导通和关断的时间比率,维持输出电压稳定的一种电源,它和线性电源相比,具有效率高、功率密度高、可以实现和输人电网的电气隔离等优点,被誉为离效节能电源M 目前开关电源已经应用到了各个领域,尤其在大功率应用的场合,开关电源具有明显的优势。
开关电源一般由脉冲宽度控制(PWM)IC、功率开关管、整流二极管和LC
滤波电路构成。
在中小功率开关电源中,功率开关管可以集成在PWM控制IC内。
开关电源按反馈方式分为电压模式和电流模式。
电流模式开关电源因其突出的优点而得到了快速的发展和广泛的应用。
但是电流模式的结构决定了它存在两个缺点:恒定峰值电流而非恒定平均电流引起的系统开环不稳定:占空比大于50%时系统的开环不稳定。
本文旨在从原理上分析传统电流模式的缺陷及改进方案,之后分析一个实用的斜坡补偿电路。
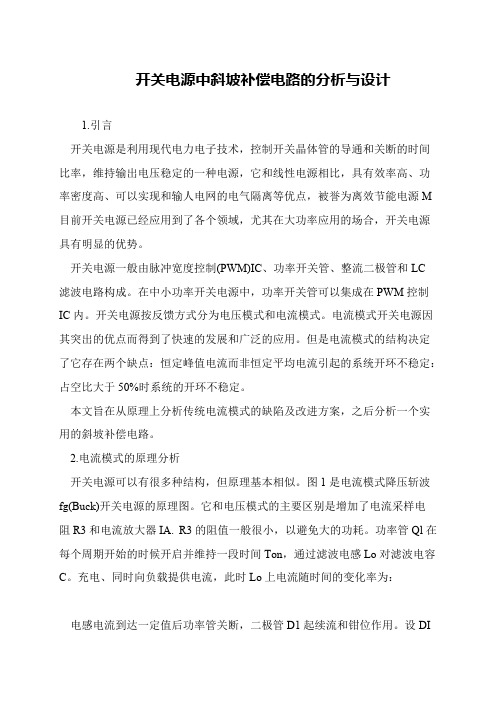
2.电流模式的原理分析
开关电源可以有很多种结构,但原理基本相似。
图1是电流模式降压斩波fg(Buck)开关电源的原理图。
它和电压模式的主要区别是增加了电流采样电
阻R3和电流放大器IA. R3的阻值一般很小,以避免大的功耗。
功率管Ql在每个周期开始的时候开启并维持一段时间Ton,通过滤波电感Lo对滤波电容C。
充电、同时向负载提供电流,此时Lo上电流随时间的变化率为:
电感电流到达一定值后功率管关断,二极管D1起续流和钳位作用。
设DI。
【原创】UC384X 的斜坡补偿⒈ UC384X 的特点UC3842/UC3843/UC3845是高性能固定频率电流模式的PWM 控制器系列,在这里简称UC384X 。
它们的工作原理和电路结构基本一样,只是个别参数不同。
UC384X 的主要优点是电压调整率可达0.01%/V ,工作频率可达500MHz 。
最高输入电压为30V ,最大输出电流为1A ,能驱动双极型功率管或MOSFET 管。
UC384X 的外围元件少,利用高频变压器实现与电网的隔离。
因此UC384X 通常被用来构成开关电源。
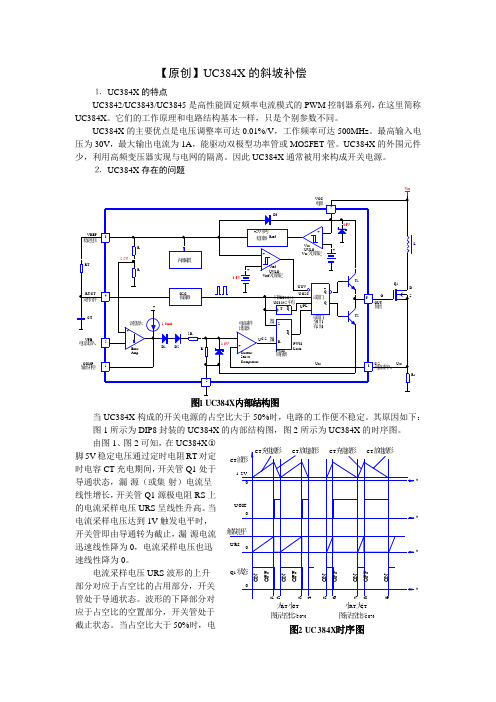
⒉ UC384X 存在的问题当UC384X 构成的开关电源的占空比大于50%时,电路的工作便不稳定。
其原因如下:图1所示为DIP8封装的UC384X 的内部结构图,图2所示为UC384X 的时序图。
由图1、图2可知,在UC384X ○8脚5V 稳定电压通过定时电阻RT 对定时电容CT 充电期间,开关管Q1处于导通状态,漏-源(或集-射)电流呈线性增长,开关管Q1源极电阻RS 上的电流采样电压URS 呈线性升高。
当电流采样电压达到1V 触发电平时,开关管即由导通转为截止,漏-源电流迅速线性降为0,电流采样电压也迅速线性降为0。
电流采样电压URS 波形的上升部分对应于占空比的占用部分,开关管处于导通状态。
波形的下降部分对应于占空比的空置部分,开关管处于截止状态。
当占空比大于50%时,电流采样电压URS波形的上升部分长于下降部分,上升部分的坡度即斜坡变得平缓,占空比越大,斜坡越平缓。
当较平缓的斜坡的顶部接近触发电平时,只要有很小的干扰脉冲混入,例如在tt时刻就有一个干扰脉冲出现(参见图3),开关管即提前截止,结果造成开关电源工作的不稳定。
⒊对UC384X的斜坡补偿为了保证在占空比大于50%时开关电源也能稳定工作,需要对电路进行斜坡补偿,或称斜率补偿。
斜坡补偿有多种方式,图3(a)所示的实例中采用的是将定时电容C1的充电波形与电流采样电压UR5的波形相叠加的方法。

详解开关电源斜坡补偿的推导过程
我们首先假设,(BUCK电路为例)电感的电流波形以斜率m1上升,然后以斜率m2下降,在电感的电流达到峰值电流的时候限值电压(顶上的电
压横线)突然受到一个干扰时间为Δt,幅值为+ΔV的干扰后(限值电压升高),电感峰值电流达到原本的峰值电流后在Δt时间内继续上升,上升的电流幅值为ΔI,随后干扰消失,电感电流以m2的斜率下降,大致如下图,下面来
计算一下受到干扰后电流波形与原本的电流轨迹的差值ΔI1,ΔI2......ΔIn,是
越来越大还是越来越小,越大则不稳定,越小则稳定。
上图中虚线为受到干扰后的波形,实线为原本的波形轨迹
我们把实线的第一个峰值电流记做i1
我们把虚线的第一个峰值电流记做i1_1
i1_1 - i1=ΔI
我们把实线的第二个峰值电流记做i2
我们把虚线的第二个峰值电流记做i2_1
有
i2=i2_1 i1=in_1
然后我们把时间点t1垂直建立一个坐标系,设时间轴t上的点t1为原点
可以看出i1以m2的斜率下降了时间toff,i1_1以m2的斜率下降了时间toff-Δt,可得出结论i1和i1_1下降到时间点t2后,i1_1比i1少下降了时间
Δt
则i1_1比i1降低的电流为Δt·m2
由于原来i1_1比i1就高出了ΔI i1_1 - i1=ΔI。
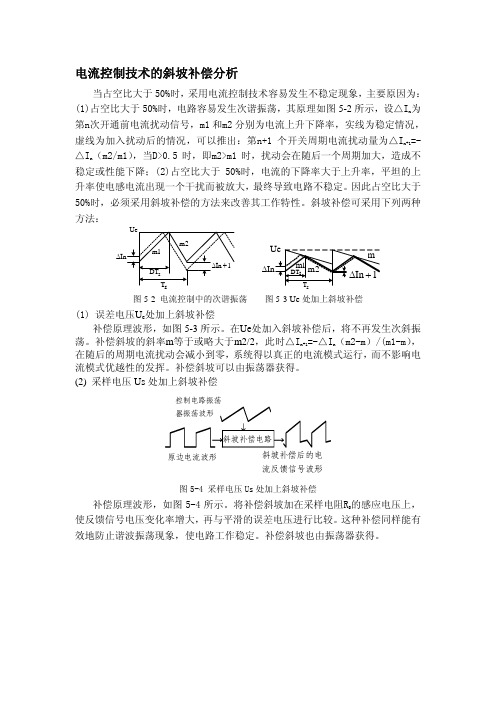
电流控制技术的斜坡补偿分析当占空比大于50%时,采用电流控制技术容易发生不稳定现象,主要原因为:(1)占空比大于50%时,电路容易发生次谐振荡,其原理如图5-2所示,设△I n 为第n次开通前电流扰动信号,m1和m2分别为电流上升下降率,实线为稳定情况,虚线为加入扰动后的情况,可以推出:第n+1个开关周期电流扰动量为△I n+1=-△I n (m2/m1),当D>0.5时,即m2>m1时,扰动会在随后一个周期加大,造成不稳定或性能下降;(2)占空比大于50%时,电流的下降率大于上升率,平坦的上升率使电感电流出现一个干扰而被放大,最终导致电路不稳定。
因此占空比大于50%时,必须采用斜坡补偿的方法来改善其工作特性。
斜坡补偿可采用下列两种方法:ΔΔ图5-2 电流控制中的次谐振荡 图5-3 Ue 处加上斜坡补偿(1) 误差电压U e 处加上斜坡补偿补偿原理波形,如图5-3所示。
在Ue 处加入斜坡补偿后,将不再发生次斜振荡。
补偿斜坡的斜率m 等于或略大于m2/2,此时△I n+1=-△I n (m2-m)/(m1-m),在随后的周期电流扰动会减小到零,系统得以真正的电流模式运行,而不影响电流模式优越性的发挥。
补偿斜坡可以由振荡器获得。
(2) 采样电压Us 处加上斜坡补偿斜坡补偿电路器振荡波形控制电路振荡原边电流波形流反馈信号波形斜坡补偿后的电图5-4 采样电压Us 处加上斜坡补偿补偿原理波形,如图5-4所示。
将补偿斜坡加在采样电阻R S 的感应电压上,使反馈信号电压变化率增大,再与平滑的误差电压进行比较。
这种补偿同样能有效地防止谐波振荡现象,使电路工作稳定。
补偿斜坡也由振荡器获得。

活学活用PWM控制器之斜坡补偿方法科普
PWM控制器作为一种非常常见的重要电子元件,在中小功率开关电源
及消费类电子产品的电路系统设计中应用广泛。
本文将会针对PWM控制器
的斜坡补偿方法进行简单介绍和科普,希望能够对正在进行电子技术学习的
爱好者和初学者带来一定的帮助。
在一些中小功率开关电源模块的研制过程中,很多工程师都需要面对一个
问题,那就是在采用了电流型PWM控制器的电路系统中,会出现输出电压
正比于输出电流平均值而不是正比于峰值电流的情况。
众所周知,功率开关
管的峰值电流由PWM控制器保持恒定控制,当输入电压减小时,为了使电
流恒定,占空比将调节为D2,这时平均电流将上升为I2,输出电压也将上升。
在电流型控制器件的调节下,仅有输出电压能够得到控制。
那幺,采用斜坡补偿的方式可以解决电流型PWM控制器的这一应用弊端吗?答案是肯定的。
首先来看斜坡补偿的技术原理。
为了维持一个恒定的平
均电流(输出电压),要求有一个与占空比无关的电流波形补偿斜坡,当(NsPNp)Rs(m2P2)=m成立时,输出电感平均电流与Ton无关,则保持
了输出电压恒定。
电流型PWM控制器的平均电流曲线如下图图1所示。
图1 电流型PWM控制器平均电流曲线
在实际的电路系统设计过程中,采用斜坡补偿的技术是比较容易实现的,
一般可以直接用图2所展示的电路来实现。
在图2所展示的斜坡补偿原理图中,一般R1的阻值预先设定,再计算R2的阻值,需要特别注意的一个问题
是R2的阻值必须足够高,以避免使振荡器产生振荡频率漂移。

电流型变换器工作原理和斜坡补偿电流型变换器工作原理和斜坡补偿1引言由于电流型控制较电压型控制方法有许多优点,所以得到了广泛使用,这已是不争的事实。
但在恒频峰值电流检测控制方法中还存在如下问题:——占空比大于50%时系统的开环不稳定性;——由于峰值电流而非平均电感电流的原因而产生的系统开环不稳定性;——次谐波振荡;——抗干扰能力差,特别当电感中的纹波电流成分很小时,这种情况更为严重。
采用图1所示的在电流波形上加斜坡补偿的方法,可使电流型控制法在占空比大于50%的情况下,使系统稳定工作。
实际上,只要电流型变换器采用了斜坡补偿,它的性能能得到很大的改善。
2峰值电流型控制存在的问题下面主要讨论峰值电流型控制存在的问题及利用斜坡补偿克服所存在问题的方法,并给出斜坡补偿的实施方案。
2.1开环不稳定性在不考虑外环电压环的情况下,当恒频电流型变换器的占空比大于50%时,就存在内环电流环工作不稳定的问题。
然而有些变换器(如双管正激变换器)它本身工作的脉冲占空比就不能大于50%,因此不存在问题。
而有些变换器的脉冲占空比不大于50%时,它的输入将会受到许多限制,如果在内环加一个斜坡补偿信号,则变换器可以在任何脉冲占空比情况下正常工作。
下面介绍斜坡补偿工作原理。
图2表示了由误差电压Ve控制的电流型变换器的波形,通过一个拢动电流△I加至电感电流IL,当占空比<0.5时,从图2(a)所示可以看出这个拢动ΔI将随时间的变化而减小;但当占空比>0.5时,这个拢动将随时间增加而增加,。
这可用数学表达式表示:ΔI1=-ΔI0(m2/m1)(1)进一步可引入斜率为-m的斜坡信号,。
这个斜坡电压既可加至电流波形上,也可以从误差电压中减去。
有下列方程式成立:ΔI1=-ΔI0(m2+m)/(m1+m)(2)图1采用斜坡补偿的BUCK电流型控制图2电流型变换器的开环不稳定性(a)D<0.5(b)D>0.5(c)D>0.5并加斜坡补偿图3没有斜坡补偿的峰值电流检测与占空比关系图图4斜坡补偿m=-(1/2)m2时的平均电感电流将和占空比D、输入电压无关在100%占空比下求解这个方程有:m>(-1/2)/m2(3)为了保证电流环路稳定工作,应使斜坡补偿信号的斜率大于电流波形下降斜率m2的1/2。
【原创】UC384X 的斜坡补偿⒈ UC384X 的特点UC3842/UC3843/UC3845是高性能固定频率电流模式的PWM 控制器系列,在这里简称UC384X 。
它们的工作原理和电路结构基本一样,只是个别参数不同。
UC384X 的主要优点是电压调整率可达0.01%/V ,工作频率可达500MHz 。
最高输入电压为30V ,最大输出电流为1A ,能驱动双极型功率管或MOSFET 管。
UC384X 的外围元件少,利用高频变压器实现与电网的隔离。
因此UC384X 通常被用来构成开关电源。
⒉ UC384X 存在的问题当UC384X 构成的开关电源的占空比大于50%时,电路的工作便不稳定。
其原因如下:图1所示为DIP8封装的UC384X 的内部结构图,图2所示为UC384X 的时序图。
由图1、图2可知,在UC384X ○8脚5V 稳定电压通过定时电阻RT 对定时电容CT 充电期间,开关管Q1处于导通状态,漏-源(或集-射)电流呈线性增长,开关管Q1源极电阻RS 上的电流采样电压URS 呈线性升高。
当电流采样电压达到1V 触发电平时,开关管即由导通转为截止,漏-源电流迅速线性降为0,电流采样电压也迅速线性降为0。
电流采样电压URS 波形的上升部分对应于占空比的占用部分,开关管处于导通状态。
波形的下降部分对应于占空比的空置部分,开关管处于截止状态。
当占空比大于50%时,电流采样电压URS波形的上升部分长于下降部分,上升部分的坡度即斜坡变得平缓,占空比越大,斜坡越平缓。
当较平缓的斜坡的顶部接近触发电平时,只要有很小的干扰脉冲混入,例如在tt时刻就有一个干扰脉冲出现(参见图3),开关管即提前截止,结果造成开关电源工作的不稳定。
⒊对UC384X的斜坡补偿为了保证在占空比大于50%时开关电源也能稳定工作,需要对电路进行斜坡补偿,或称斜率补偿。
斜坡补偿有多种方式,图3(a)所示的实例中采用的是将定时电容C1的充电波形与电流采样电压UR5的波形相叠加的方法。
斜坡补偿电路原理你看啊,在电源电路里呢,有个叫电流模式控制的方法。
这就像是一个小管家,要管着电路里电流的事儿。
可是呢,这个小管家有时候也会遇到麻烦。
比如说,当占空比(这就像是电流工作的时间比例啦)变得比较大的时候,电路就会开始捣乱,它会出现一种不稳定的情况,就像小朋友闹脾气一样。
那怎么办呢?这时候斜坡补偿电路就闪亮登场啦。
斜坡补偿电路就像是一个超级英雄,来拯救这个不稳定的局面。
想象一下,电路里的电流或者电压信号就像一座座小山包。
正常情况下呢,这些小山包按照一定的规律排列着,电路就稳稳当当的。
但是当占空比变大的时候,这些小山包就开始变得歪歪扭扭,电路就跟着不稳定啦。
斜坡补偿电路呢,它会给这些小山包添加一些特殊的“泥土”,让小山包重新变得规规矩矩的。
具体来说哦,斜坡补偿电路会产生一个斜坡信号。
这个斜坡信号就像是一把神奇的小铲子,把那些不整齐的小山包重新塑形。
这个斜坡信号会和原来电路里的信号混合在一起。
比如说,原来的信号是往上冲得太猛了,斜坡信号就像一个温柔的力量,拉着它,让它慢慢上升,而不是一下子就冲到天上去。
你可以把原来的电路信号想象成一个调皮的小猴子,总是上蹿下跳的。
斜坡补偿电路产生的信号呢,就像是小猴子的妈妈,牵着它,让它稳稳地走路。
这样一来,电路就不会因为电流或者电压信号的乱跳而不稳定啦。
再从数学的角度看一丢丢哈。
在没有斜坡补偿的时候,电路的一些计算就像是在走钢丝,很容易出错。
一旦加上了斜坡补偿,就像是给走钢丝的人加上了安全绳。
它改变了电路的一些数学关系,让那些原本可能会导致电路混乱的计算变得合理起来。
而且哦,斜坡补偿电路的这个斜坡信号可不是随便乱加的。
它的斜率是经过精心设计的。
就像裁缝做衣服,每一针每一线都得恰到好处。
如果斜率太大了,就像给小猴子的妈妈太大的力气,会把小猴子拉得太狠,电路又会出现新的问题。
要是斜率太小呢,就像妈妈根本拉不住小猴子,电路还是不稳定。
在实际的电路中,斜坡补偿电路的实现方式也是多种多样的。
起因:当电流模式控制变换器的占空比超过50%的时候,变换器会在开关频率的次谐波频率点出现振荡,准确地说是在一半开关频率的地方,除非采取斜坡补偿措施。
斜坡补偿的定义:在电流模式控制下,当电流达到一定大小时(由误差放大器输出设定)开关关断。
如果占空比超过50%,电感电流的上升时间就大于整个周期的50%,那么电流下降时间就小于一个周期的50%’。
在较短的时间内,电流还没有来得及回到静态初始值,下一个周期接着又开始了。
下一个周期的初始电流变大了。
在接下来的这个周期里,电感电流很快就上升到参考点,使导通时间变短,占空比变得更窄;和上一个周期相比,这个周期的占空比减小到50%以内。
但是这样又导致关断时间太长,下一个周期电流的初始值太小,又使得占空比再一次超过50%。
如此循环,电流以间隔一个周期过大和过小的方式出现振荡。
操作:针对这个问题,斜坡补偿基本上是在电流上迭加一个固定斜坡的信号。
由于所迭加的斜坡是一个固定值,电流闭环的影响可以得到较好抑制。
事实上,斜坡补偿的真正作用是使控制环更像电压模式控制。
可以这样来理解:电压模式控制是用固定斜坡的锯齿波和误差放大器的输出进行比较,所以当选加的斜坡越来越大的时候,变换器就越来越像电压模式控制,当斜坡补偿的幅度与电流信号幅度之比趋于无穷大时,就完全变成了电压模式控制。
刚才的说法也同样可以得到解释:电源轻载时电流模式控制就变成了电压模式控制。
电流模式控制的好处:从实用的目的来说,用第二个环路,即内环(见附图1)的目的是为了控制电感电流,使电感影响不出现在功率回路的传递函数中。
这是因为功率回路的传递函数已经包含了电流闭环回路在内,因此电感的作用完全被环路包括在内而不会出现在响应特性中。
这样就不必担心输出!"谐振回路,在高频段,就只有一个极点(输出电容),相移是-90°而不是-180°。
由于这些原因,电流模式控制要比电压模式控制更加容易,而且也使得电流模式控制的带宽可以更宽。