浅谈基于UG凸轮机构的运动仿真
- 格式:doc
- 大小:566.00 KB
- 文档页数:6
影线长短觉得因素有哪些_影线长短代表什么意思影线长短觉得因素有哪些_影线长短代表什么意思股票k线最上方的一条细线就被称之为上影线,中间的一条粗线是其实体。
那么股票影线长短是什么意思呢?下面是整理的影线长短觉得因素有哪些,希望能够帮助到大家。
影线长短觉得因素有哪些下影线可以视作为对股价的推力,上影响则可以代表对于股价的压力。
在K线中,影线向一个方向拉得越长,代表阴力越大,股价将按反方向波动的概率越大。
实体的阴阳和长短、上下影线的长短都反映了市场上多空力量的对比,蕴含着推动市场变动的力量,可以从中判断股价变动的趋势。
影线代表转折的信号,向着一个方向的影线越长,越不利于汇价往这个方向的变动。
简单来说,上影线越长越不利于股价的上涨,下影线越长越不利于汇价的下跌。
影线主要有上影线和下影线。
其中,上影线的长短是由最高价与开盘价的关系决定的,下影线的长短是由最低价与收盘价的关系决定的。
影线是由于多空双方角逐之后,在K线上方或下方产生的一根实线,通常是波动转折的信号。
下影线可以视作为对股价的推力,上影响则可以代表对于股价的压力。
在K线中,影线向一个方向拉得越长,代表阴力越大,股价将按反方向波动的概率越大。
实体的阴阳和长短、上下影线的长短都反映了市场上多空力量的对比,蕴含着推动市场变动的力量,可以从中判断股价变动的趋势。
影线代表转折的信号,向着一个方向的影线越长,越不利于汇价往这个方向的变动。
简单来说,上影线越长越不利于股价的上涨,下影线越长越不利于汇价的下跌。
影线长短代表什么意思股票的影线分为上影线和下影线。
对于阳线,上影线代表的实际上收盘价与最高价之间的差距,下影线则代表的是开盘价与最低价的差距;对于阴线,上影线代表的是开盘价与最高价之间的差距,下影线则代表的是收盘价与最低价的差距。
下影线可以视作为对股价的推力,上影响则可以代表对于股价的压力。
不过单一一根影响要放在具体的K线排列中才能更有意义,例如双针探底和双针探底就是两种典型的形态:【1】双针探底:是指两根有一定间隔的K线,都带有较长的下影线,是K 线图较为常见底部反转形态图表之一。

《基于UG的运动仿真及高级仿真》项目一:机构运动仿真项目要求:熟悉UG机构运动仿真模块的内容,掌握运动仿真的一般流程和方法,并根据分析输出结果对机构进行优化。
任务一:熟悉掌握运动仿真基础知识运动分析模块(Scenario for motion)是UG/CAE模块中的主要部分,用于建立运动机构模型,分析其运动规律。
通过UG/Modeling的功能建立一个三维实体模型,利用UG/Motion的功能给三维实体模型的各个部件赋予一定的运动学特性,再在各个部件之间设立一定的连接关系既可建立一个运动仿真模型。
UG/Motion模块可以进行机构的干涉分析,跟踪零件的运动轨迹,分析机构中零件的速度、加速度、作用力、反作用力和力矩等。
运动分析模块的分析结果可以指导修改零件的结构设计(加长或缩短构件的力臂长度、修改凸轮型线,调整齿轮比等)或调整零件的材料(减轻或加重或增加硬度等)。
设计的更改可以反映在装配主模型的复制品分析方案中,再重新分析,一旦确定优化的设计方案,设计更改就可反映在装配主模型中。
一、运动方案创建步骤1.创建连杆(Links);2.创建两个连杆间的运动副(Joints)3.定义运动驱动(Motion Driver)◆无运动驱动(none):构件只受重力作用◆运动函数:用数学函数定义运动方式◆恒定驱动:恒定的速度和加速度◆简谐运动驱动:振幅、频率和相位角◆关节运动驱动:步长和步数二、创建连杆创建连杆对话框将显示连杆默认的名字,格式为L001、L002 (00)质量属性选项:质量特性可以用来计算结构中的反作用力。
当结构中的连杆没有质量特性时,不能进行动力学分析和反作用力的静力学分析。
根据连杆中的实体,可以按默认设置自动计算质量特性,在大多数情况下,这些默认计算值可以生成精确的运动分析结果。
但在某些特殊情况下,用户必须人工输入这些质量特性。
固定连杆:人工输入质量属性,需要指定质量、惯性矩、初始移动速度和初始转动速度。
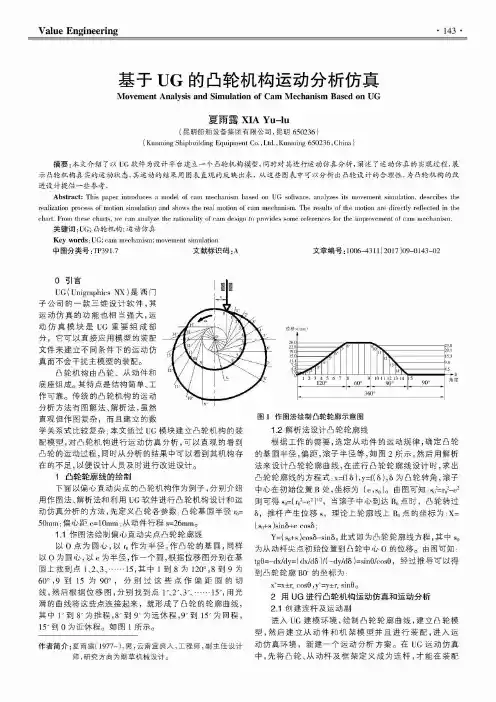
Value Engineering• 143 •基于UG 的凸轮机构运动分析仿真Movement Analysis and Simulation of Cam Mechanism Based on UG夏雨露XIA Y u-lu (昆明船舶设备集团有限公司,昆明650236)(K u n m in g S h ip b u ild in g E q u ip m e n t Co ., L td ., K u n m in g 650236, C hina )摘要:本文介绍了以U G 软件为设计平台建立一个凸轮机构模型,同时对其进行运动仿真分析,阐述了运动仿真的实现过程,展示凸轮机构真实的运动状态,其运动的结果用图表直观的反映出来,从这些图表中可以分析出凸轮设计的合理性,为凸轮机构的改 进设计提供一些参考。
A b s tr a c t : T h is pa per introduce s a m odel of cam m e chanism based on U G software , analyzes its m ovem ent s im u la tio n , describes the re a liza tio n process of m o tion sim u la tio n and shows the real m o tio n of cam m echanism . The results of the m o tion are d ire c tly re fle cte d in the ch a rt . From these ch a rts , we can analyze the ra tio n a lity of cam design to provides some references fo r the im provem ent of cam m e chanism .关键词:U G ;凸轮机构;运动仿真K e y w o rd s :U G ; cam m e chanism ; m ovem ent sim u la tio n 中图分类号:T P 391.7 文献标识码:A 文章编号:1006-4311(2017)09-0143-02位移(m m )图1作图法绘制凸轮轮廓示意图0引言U G ( U n ig r a p h ic s N X )是西门 子公司的一款三维设计软件,其 运动仿真的功能也相当强大,运动仿真模块是U G 重要组成部 分,它可以直接应用模型的装配 文件来建立不同条件下的运动仿 真而不会干扰主模型的装配。
题目:基于UG的机械产品运动仿真姓名:刘光祥学号: 200808081298 系部:机电工程系专业:机电一体化指导老师:陈卫华提交时间: 2010年12月6日摘要UG是目前市场上功能最极致的产品设计工具。
它不但拥有现今CAD/CAM软体中功能最强大的Parasolid实体建模核心技术,更提供高效能的曲面建构能力,能够完成最复杂的造形设计。
UG提供工业标准之人机介面,不但易学易用,更有无限次数的undo功能、方便好用的弹出视窗指令、快速图像操作说明、自订操作功能指令及中文化操作介面等特色,并且拥有一个强固的档案转换工具,能转换各种不同CAD应用软体的图档,以重复使用旧有资料。
运动仿真是UG/CAE(Computer Aided Engineering)模块中的主要部分,它能对任何二维或三维机构进行复杂的运动学分析、动力分析和设计仿真。
通过UG/Modeling的功能建立一个三维实体模型,利用UG/Motion的功能给三维实体模型的各个部件赋予一定的运动学特性,再在各个部件之间设立一定的连接关系既可建立一个运动仿真模型。
UG/Motion的功能可以对运动机构进行大量的装配分析工作、运动合理性分析工作,诸如干涉检查、轨迹包络等,得到大量运动机构的运动参数。
通过对这个运动仿真模型进行运动学或动力学运动分析就可以验证该运动机构设计的合理性,并且可以利用图形输出各个部件的位移、坐标、加速度、速度和力的变化情况,对运动机构进行优化。
目录摘要 (2)概述.................................................................................. 错误!未定义书签。
第一章建模...................................................................... 错误!未定义书签。
1.0 连杆的设计 ............................................................ 错误!未定义书签。
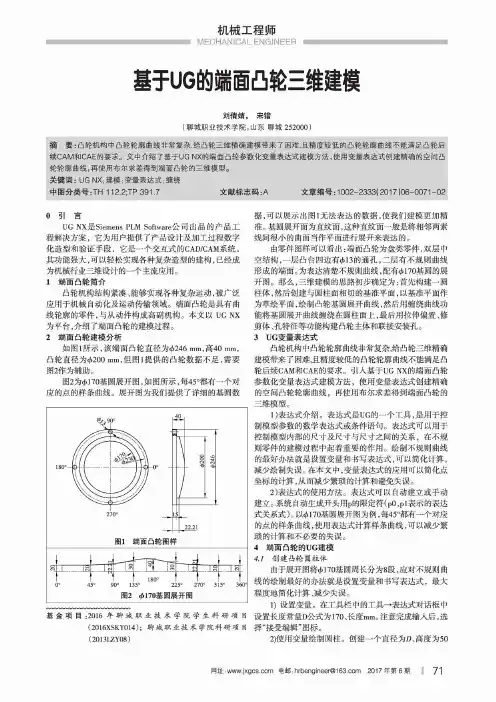
MECHANICAL ENGINEER基于UG 的端面凸轮三维建模刘倩婧,宋锴(聊城职业技术学院,山东聊城252000)摘要:凸轮机构中凸轮轮廓曲线非常复杂,给凸轮三维精确建模带来了困难,且精度较低的凸轮轮廓曲线不能满足凸轮后续CAM 和CAE 的要求。
文中介绍了基于UG NX 的端面凸轮参数化变量表达式建模方法,使用变量表达式创建精确的空间凸 轮轮廓曲线,再使用布尔求差得到端面凸轮的三维模型。
关键词:UG NX ;建模;变量表达式;缠绕中图分类号:TH 112.2;TP 391.7 文献标志码:A文章编号:1002-2333(2017)06-0071-02引言UG NX 是Siemens PLM Software 公司出品的产品工程解决方案,它为用户提供了产品设计及加工过程数字 化造型和验证手段,它是一个交互式的CAD/CAM 系统, 其功能强大,可以轻松实现各种复杂造型的建构,已经成 为机械行业三维设计的一个主流应用。
1端面凸轮简介凸轮机构结构紧凑、能够实现各种复杂运动,被广泛 应用于机械自动化及运动传输领域。
端面凸轮是具有曲 线轮廓的零件,与从动件构成高副机构。
本文以UG NX 为平台,介绍了端面凸轮的建模过程。
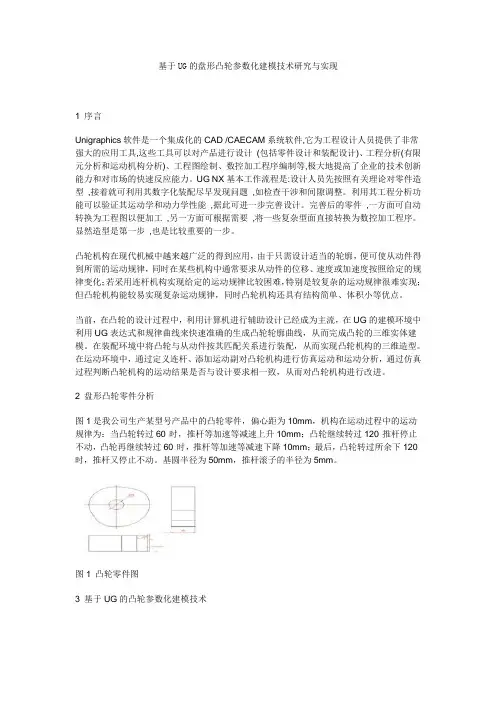
2端面凸轮建模分析如图1所;该端面凸轮直径为令246 mm ,髙40 mm , 凸轮直径为小200 mm ,但图1提供的凸轮数据不足,需要 图2作为辅助。
图2为(/>170基圆展开图,如图所示,每45°都有一个对 应的点的样条曲线。
展开图为我们提供了详细的基圆数基金项目=2016年聊城职业技术学院学生科研项目 (2016XSKY 014);聊城职业技术学院科研项目 (2013LZY 08)据,可以展示出图1无法表达的数据,使我们建模更加精准。
基圆展开面为直纹面,这种直纹面一般是将相邻两素 线间很小的曲面当作平面进行展开来表达的。
由零件图样可以看出:端面凸轮为盘类零件,双层中 空结构,一层凸台四边有的通孔,二层有不规则曲线 形成的端面。
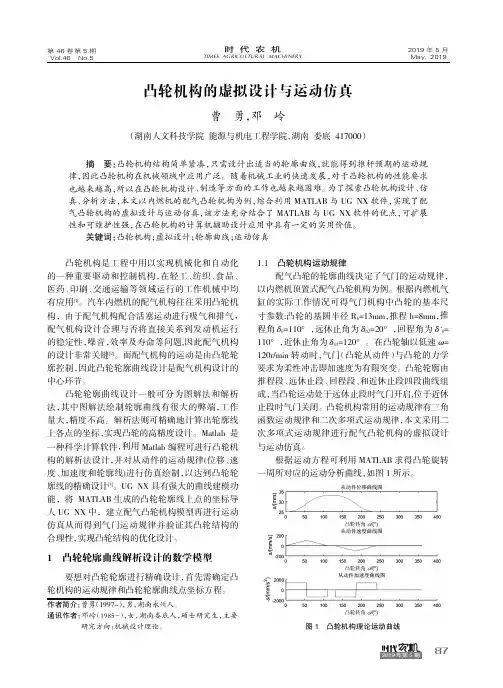
2019年第5期凸轮机构的虚拟设计与运动仿真曹勇,邓岭(湖南人文科技学院能源与机电工程学院,湖南娄底417000)摘要:凸轮机构结构简单紧凑,只需设计出适当的轮廓曲线,就能得到推杆预期的运动规律,因此凸轮机构在机械领域中应用广泛。
随着机械工业的快速发展,对于凸轮机构的性能要求也越来越高,所以在凸轮机构设计、制造等方面的工作也越来越困难。
为了探索凸轮机构设计、仿真、分析方法,本文以内燃机的配气凸轮机构为例,综合利用MATLAB 与UG NX 软件,实现了配气凸轮机构的虚拟设计与运动仿真,该方法充分结合了MATLAB 与UG NX 软件的优点,可扩展性和可维护性强,在凸轮机构的计算机辅助设计应用中具有一定的实用价值。
关键词:凸轮机构;虚拟设计;轮廓曲线;运动仿真作者简介:曹勇(1997-),男,湖南永州人。
通讯作者:邓岭(1985-),女,湖南娄底人,硕士研究生,主要研究方向:机械设计理论。
凸轮机构是工程中用以实现机械化和自动化的一种重要驱动和控制机构,在轻工、纺织、食品、医药、印刷、交通运输等领域运行的工作机械中均有应用[1]。
汽车内燃机的配气机构往往采用凸轮机构,由于配气机构配合活塞运动进行吸气和排气,配气机构设计合理与否将直接关系到发动机运行的稳定性,噪音,效率及寿命等问题,因此配气机构的设计非常关键[2]。
而配气机构的运动是由凸轮轮廓控制,因此凸轮轮廓曲线设计是配气机构设计的中心环节。
凸轮轮廓曲线设计一般可分为图解法和解析法,其中图解法绘制轮廓曲线有很大的弊端,工作量大,精度不高。
解析法则可精确地计算出轮廓线上各点的坐标,实现凸轮的高精度设计。
Matlab 是一种科学计算软件,利用Matlab 编程可进行凸轮机构的解析法设计,并对从动件的运动规律(位移、速度、加速度和轮廓线)进行仿真绘制,以达到凸轮轮廓线的精确设计[3]。
UG NX 具有强大的曲线建模功能,将MATLAB 生成的凸轮轮廓线上点的坐标导人UG NX 中,建立配气凸轮机构模型再进行运动仿真从而得到气门运动规律并验证其凸轮结构的合理性,实现凸轮结构的优化设计。
收稿日期:2018-02-02作者简介:李银标(1967—),男,江苏无锡人,本科,毕业于江苏大学,高级实验师,研究方向:机械制造与自动化。
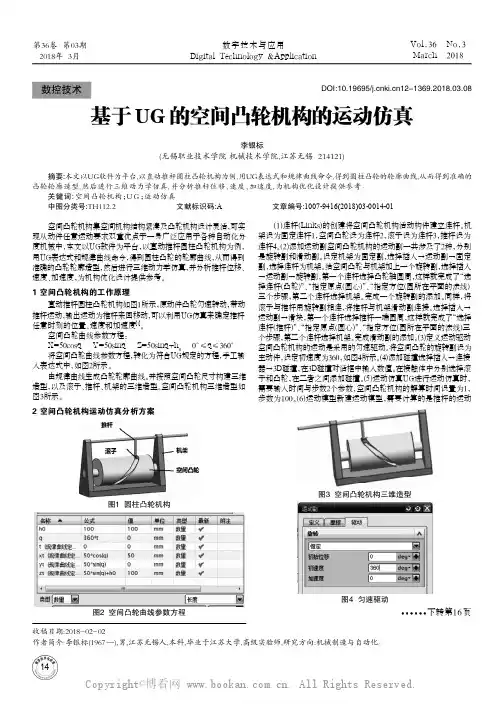
空间凸轮机构集空间机构结构紧凑及凸轮机构设计灵活,可实现从动件任意运动要求双重优点于一身广泛应用于各种自动化分度机械中,本文以UG软件为平台,以直动推杆圆柱凸轮机构为例,用UG表达式和规律曲线命令,得到圆柱凸轮的轮廓曲线,从而得到准确的凸轮轮廓造型,然后进行三维动力学仿真,并分析推杆位移、速度、加速度,为机构优化设计提供参考。
1 空间凸轮机构的工作原理直动推杆圆柱凸轮机构如图1所示,原动件凸轮匀速转动,带动推杆运动,输出运动为推杆来回移动,可以利用UG仿真来确定推杆任意时刻的位置、速度和加速度[1]。
空间凸轮曲线参数方程:X=50cosq Y=50sinq Z=50sinq+h 0 0°≤q≤360°将空间凸轮曲线参数方程,转化为符合UG规定的方程,手工输入表达式中,如图2所示。
由规律曲线生成凸轮轮廓曲线。
并按照空间凸轮尺寸构建三维造型,以及滚子、推杆、机架的三维造型。
空间凸轮机构三维造型如图3所示。
2 空间凸轮机构运动仿真分析方案(1)连杆(Links)的创建将空间凸轮机构活动构件建立连杆。
机架设为固定连杆1,空间凸轮设为连杆2,滚子设为连杆3,推杆设为连杆4。
(2)添加运动副空间凸轮机构的运动副一共涉及了2种,分别是旋转副和滑动副。
设定机架为固定副,选择插入→运动副→固定副,选择连杆为机架。
给空间凸轮与机架加上一个旋转副,选择插入→运动副→旋转副,第一个连杆选择凸轮轴圆周,这样就完成了“选择连杆(凸轮)”、“指定原点(圆心)”、“指定方位(圆所在平面的法线)三个步骤,第二个连杆选择机架。
完成一个旋转副的添加。
同样,将滚子与推杆用旋转副相连,将推杆与机架滑动副连接。
选择插入→运动副→滑块,第一个连杆选择推杆一端圆周,这样就完成了“选择连杆(推杆)”、“指定原点(圆心)”、“指定方位(圆所在平面的法线)三个步骤,第二个连杆选择机架。
·44· 计算机应用技术 机械 2007年第12期 总第34卷————————————————收稿日期:2007-07-06 基于UG 的凸轮机构运动仿真研究刘善林,胡鹏浩,张勇(合肥工业大学 仪器科学与光电工程学院,安徽 合肥 230009)摘要:对凸轮机构的运动分析,除用传统的分析方法之外,还可利用UG 对其运动进行仿真分析。
通过举一凸轮机构的简单例子,详细说明了UG 运动仿真的方法和步骤,运动仿真的形式包括关节运动或运动仿真,运动仿真的结果可以用图表和电子表格的形式绘出,从而为机构的优化设计提供参考依据。
关键词:凸轮机构;运动仿真;UG中图分类号:TP391.9 文献标识码:A 文章编号:1006-0316(2007)12-0044-03The motion simulation and research of cam mechanism based on UGLIU Shan-lin ,HU Peng-hao ,ZHANG Yong(School of Instrument Science and Opto-electronic Engineering ,Hefei University of Technology ,Hefei 230009,China) Abstract :Another motion analysis method about cam mechanism has been introduced in this paper except the traditional one, taking a cam mechanism for example, the method and procedure how to realize the motion simulation based on UG has been presented in detail. The motion form can be displayed with Articulation or Animation, the result of motion simulation can be reflected with the graphic and the spreadsheet in order to provide the reference for the mechanism optimized design. Key words :cam mechanism ;motion simulation ;UG凸轮机构由凸轮、从动件和机架组成。
计算机技术应用 《机电技术》2010年第2期基于UG 的盘形凸轮参数化建模及运动仿真谢晓华(永州职业技术学院,湖南 永州 425100)摘 要:利用UG 软件的表达式工具和规律曲线等功能进行凸轮机构参数化建模,并对凸轮机构的工作过程进行运动仿真和运动分析,将设计结果以动画和图表的形式表现出来,可精确、快速地完成凸轮机构的设计。
关键词:UG ;参数化;凸轮;运动仿真中图分类号:TH132.47 文献标识码:A 文章编号:1672-4801(2010)02-027-03凸轮机构因具有结构简单、运动准确可靠等优点,在机械和自动控制系统中被广泛应用。
凸轮机构设计的关键在于凸轮轮廓曲线的设计,通常的方法是根据从动件的运动规律,应用图解法或解析法来设计凸轮轮廓曲线。
图解法直观、简便,但精度不高,解析法精确但计算繁杂,也不能满足现代设计的需要。
UG 是大型的CAD/CAE/CAM 三维软件,可利用其建模模块的表达式工具和规律曲线等功能,结合解析法进行凸轮机构的三维设计,还可在运动仿真模块中进行运动仿真和运动分析。
1 盘形凸轮运动规律分析及轮廓曲线方程设计一滚子移动从动件盘形凸轮,已知:基圆半径r b =80mm,滚子半径r T =10mm,偏距e=10mm,从动件的升程h=15mm,推程运动角A01=50°,远停程角A02=130°,回程运动角A03=40°,近停程角A04=140°,凸轮厚度为20mm。
设从动件以3-4-5次多项式运动规律上升,以余弦加速度运动规律下降。
根据反转法原理,得到凸轮理论轮廓线方程: x=(s 0 +s)sinφ + ecosφy=(s 0 +s)cosφ - esinφ 式中s 0=22b e -r ,r b 为基圆半径,e 为偏距,s 为从动件位移,φ为凸轮转角。
对于从动件位移s,根据运动规律不同,各阶段计算如下:推程为3-4-5次多项式运动规律:s=h[10(Φ φ)3-15(Φ φ)4+6 (Φφ)5] 远停程:s=h回程为余弦加速度运动规律:s=2h (1+cos φΦπ) 近停程:s=02 盘形凸轮参数化建模2.1 建立表达式方程在UG 建模环境下,点击“工具”下拉菜单的“表达式”命令,在“表达式”对话框中输入以下表达式(也可从表达式数据文件导入):r b =80 //基圆半径; r T =10 //滚子半径; e=10 //偏距; h=15 //行程;A01=50 //推程运动角; A02=130 //远停程角; A03=40 //回程运动角; A04=140 //近停程角; s0=sqrt(r b ^2-e^2) t=0//推程(3-4-5次多项式运动规律)理论轮廓曲线表达式如下:a1=0 //起始角; b1=50 //终止角;B01=a1*(1-t)+b1*t //凸轮转角; s1=h*(10*(B01/A01)^3-15*(B01/A01)^4+6*(B01/A01)^5) // 升程变量;x1=(s0+s1)*sin(B01)+e*cos(B01) //理论轮廓曲线X 坐标值;y1=(s0+s1)*cos(B01)-e*sin(B01) //理论轮廓曲线Y 坐标值;z1=0 //理论轮廓曲线Z 坐标值; //远停程理论轮廓曲线表达式如下: a2=50 b2=180B02=a2*(1-t)+b2*t s2=hx2=(s0+s2)*sin(B02)+e*cos(B02) y2=(s0+s2)*cos(B02)-e*sin(B02) z2=0//回程(余弦加速度运动规律)理论轮廓曲线表达式如下:a3=180 b3=220B03=a3*(1-t)+b3*t Bn03=B03-180s3= h*(1+cos(180*Bn03/A03))/2 x3=(s0+s3)*sin(B03)+e*cos(B03) y3=(s0+s3)*cos(B03)-e*sin(B03) z3=0//近停程理论轮廓曲线表达式如下: a4=220 b4=360B04=a4*(1-t)+b4*t s4=0x4=(s0+s4)*sin(B04)+e*cos(B04) y4=(s0+s4)*cos(B04)-e*sin(B04) z4=02.2 绘制凸轮理论轮廓曲线执行“规律曲线”命令,选择“根据方程”方式,分别定义各段曲线的坐标x, y, z,最后形成的凸轮理论轮廓曲线,如图1所示。
浅谈基于UG凸轮机构的运动仿真Xxx(xx大学 xx学院江苏xx xxxxx)摘要:介绍如何利用UG软件来完成凸轮机构设计和运动仿真。
应用UG 的表达式工具和规律曲线功能, 精确、快速地生成凸轮实体, 应用UG的运动仿真功能, 再现凸轮机构的运动过程, 检验机构的运动结果是否与设计相一致, 以保证设计的准确性。
[1]关键词: UG ;凸轮;机构;运动仿真;参数化Discussion on the dynamic simulation of cam mechanismbased on UGxxxxx(UGS College, Yancheng Institute of Technology, Yancheng, Jiangsu 224051) Abstract: This article introduces how fulfills the design of the cam mechanism and the motion simulation by UG software. Using the expression tool and the law curve of UG software, the cam entity can be produced precisely and fast. Using the motion simulation of UG software, the whole process of the cam mechanism can reappeared. Whether the result of the movement is consistent with the design can be examined.Key words: UG; Cam ;mechanism;Motion simulation;Parametric0 引言凸轮机构因具有结构简单、运动准确可靠等优点,在机械和自动控制系统中被广泛应用。
1.1 基于UG的机构运动仿真方法在“三维实体造型”等有关先修课中,我们学习了通过UG/Modeling建立三维实体模型的方法,本节主要介绍利用UG/Motion对机构进行运动仿真的方法。
UG/Motion是UG/CAE (Computer Aided Engineering)模块中的主要部分,利用UG/Motion的功能给三维实体模型的各个部件赋予一定的运动学特性,再在各个部件之间设立一定的连接关系即可建立一个运动仿真模型,之后可对运动机构进行装配分析、运动合理性分析,诸如干涉检查、轨迹包络等,得到运动机构的运动参数。
通过运动仿真验证该运动机构设计的合理性,并且可以利用图形输出各个部件的位移、坐标、加速度、速度和力的变化情况,对运动机构进行优化。
运动仿真功能的实现步骤为:①建立一个运动分析场景; ②进行运动模型的构建,包括设置每个零件的连杆特性,设置两个连杆间的运动副和添加机构载荷;③进行运动参数的设置,提交运动仿真模型数据,同时进行运动仿真动画的输出和运动过程的控制; ④运动分析结果的数据输出和表格、变化曲线输出,人为的进行机构运动特性的分析。
1.1.1 运动仿真工作界面在UG的主界面中选择菜单【Application】→【Motion】,系统将会自动打开UG/Motion的主界面。
该界面分为三个部分:运动仿真工具栏部分、运动场景导航窗口和绘图区,如图6-25所示。
图6-25 UG/Motion 主界面运动仿真工具栏部分主要是UG/Motion各项功能的快捷按钮,包括连杆特性和运动副工具、载荷工具、运动分析工具以及运动模型管理工具等四类工具按钮,各按钮的功能如图6-26所示。
运动场景导航窗口部分主要是显示当前操作下处于工作状态的各个运动场景的信息,包括文件名称,运动场景的名称、类型、状态、环境参数以及运动模型参数等 。
运动场景是UG运动仿真的框架和入口,它是整个运动模型的载体,储存了运动模型的所有信息。
基于UG的盘形凸轮参数化建模及运动仿真
谢晓华
【期刊名称】《机电技术》
【年(卷),期】2010(033)002
【摘要】利用UG软件的表达式工具和规律曲线等功能进行凸轮机构参数化建模,并对凸轮机构的工作过程进行运动仿真和运动分析,将设计结果以动画和图表的形式表现出来,可精确、快速地完成凸轮机构的设计.
【总页数】3页(P27-28,32)
【作者】谢晓华
【作者单位】永州职业技术学院,湖南,永州,425100
【正文语种】中文
【中图分类】TH132.47
【相关文献】
1.基于UG的盘形凸轮参数化建模技术研究与实现
2.基于UG的溅油机构的参数化建模及运动仿真
3.基于Pro/E盘形凸轮精确参数化建模及运动仿真
4.基于UG的冲压机参数化建模及运动仿真
5.基于UG的扰流片式推力矢量装置参数化建模及运动仿真
因版权原因,仅展示原文概要,查看原文内容请购买。
浅谈基于UG凸轮机构的运动仿真
Xxx
(xx大学 xx学院江苏xx xxxxx)
摘要:介绍如何利用UG软件来完成凸轮机构设计和运动仿真。
应用UG 的表达式工具和规律曲线功能, 精确、快速地生成凸轮实体, 应用UG的运动仿真功能, 再现凸轮机构的运动过程, 检验机构的运动结果是否与设计相一致, 以保证设计的准确性。
[1]
关键词: UG ;凸轮;机构;运动仿真;参数化
Discussion on the dynamic simulation of cam mechanism
based on UG
xxxxx
(UGS College, Yancheng Institute of Technology, Yancheng, Jiangsu 224051) Abstract: This article introduces how fulfills the design of the cam mechanism and the motion simulation by UG software. Using the expression tool and the law curve of UG software, the cam entity can be produced precisely and fast. Using the motion simulation of UG software, the whole process of the cam mechanism can reappeared. Whether the result of the movement is consistent with the design can be examined.
Key words: UG; Cam ;mechanism;Motion simulation;Parametric
0 引言
凸轮机构因具有结构简单、运动准确可靠等优点,在机械和自动控制系统中被广泛应用。
凸轮机构设计的关键在于凸轮轮廓曲线的设计,通常的方法是根据从动件的运动规律,应用图解法或解析法来设计凸轮轮廓曲线。
图解法直观、简便,但精度不高,解析法精确但计算繁杂,也不能满足现代设计的需要。
UG 是大型的CAD/CAE/CAM 三维软件,可利用其建模模块的表达式工具和规律曲线等功能,结合解析法进行凸轮机构的三维设计,还可在运动仿真模块中进行运动仿真和运动分析。
[2]
1 UG 运动仿真模块介绍
运动仿真模块是CAE应用软件,用于建立运动机构模型,分析其运功规律运动方针。
运动仿真模块可以进行机构的干涉分析。
跟踪零件的运动轨迹,分析机构中零件的速度、加速度、作
用力、反作用力、和力矩等。
根据这些分析结果可以指导修改零件的结果设计或调整零件的材料。
分析结果可以用来指导零件结构的设计优化。
UG 运动仿真和分析分3 个阶段进行:
(1)前处理阶段: 创建分析方案, 通过分析方案得到的信息生成内部的ADAMS 输入数据文件, 再传送到ADAMS 解算器。
(2)求解阶段: ADAMS 解算器处理输入数据, 并生成内部的ADAMS 输出数据文件, 再传送到运动分析模块中。
(3)后处理阶段: 运动分析模块解释ADAMS 的输出数据文件, 并转化成动画、图表及报表文件。
2 凸轮运动规律分析及轮廓曲线方程
2.1 运动规律分析
已知从动件的运动规律为: 当凸轮转过Φ=600时,从动件以等加速等减速运动规律上升 h=10mm ;凸轮再转过Φ'=1200,从动件停止不动;当凸轮再转过Φ=600时,从动件以等加速等减速运动规律下降h=10mm ;其余Φs '=1200,从动件静止不动。
已知基圆r b =50mm ,滚子半径r=10mm ,凸轮厚度10mm 。
凸轮以等角速度顺时针转动,试设计凸轮机构,并输出从动件运动规律。
[4]
(1)推程阶段
等加速部分:
等减速部分:
(2)远休止阶段 rb=50mm S3 = h
(3)回程阶段
(4)近休止阶段 rb=50mm S6=0
2.2建立表达式方程
222246010*210210ϕϕ-=Φ-=h s 222216010*22ϕϕ=Φ=h s 0300→由ϕ22222)60(6010*210)(2ϕϕ--=-ΦΦ-=h h s 0
06030→由ϕ22
225)60(6010*2)(2ϕϕ-=-ΦΦ=h s ϕϕ
cos )(sin )(s r y s r x b B b B +=+=
图1 表达式方程
2.3绘制凸轮理论轮廓曲线
执行“规律曲线”命令,选择“根据方程”方式,分别定义各段曲线的坐标x, y, z,最后形成的凸轮理论轮廓曲线。
[3]
如图:
图2 凸轮理论轮廓曲线
S3 = h
3 用UG 进行凸轮机构运动仿真和运动分析
3.1 创建连杆(Links) 和运动副(Joints)
进入UG 运动模块, 新建运动分析方案。
为此方案创建2个连杆: L001(凸轮)、L002(尖顶从动件) 和3个运动副: 凸轮与地固定的旋转副J001, 尖顶对轮廓曲线的点在线上副J002,尖顶从动件对于凸轮的滑动副J003。
[7]
3.2 定义运动驱动(Motion Driver)
运动驱动驱动机构运动, 为旋转副J001,选择恒定驱动( Constant Drive), 并设定驱动参数, 使凸轮以36度/秒的速度匀速转动。
3.3 运动仿真
选择运动仿真( Animation) 图标即启动运动仿真分析过程。
在分析选项对话框中选择机构运动学/机构动力学分析,时间设为10s(凸轮旋转1周), 步数为360步, 即凸轮每转1b 分析模型的运动状况。
启动ADAMS 解算器, 进行运动分析。
运动分析完成, 运动仿真对话框自动弹出, 可以选择全程或单步的方式来进行运动仿真, 即以动画来表现机构的运动过程。
仿真的结果也可以以图表( Graphing) 的形式绘出, 它反映了滑动副J003, 即尖顶从动件位移、速度、加速度的信息。
动画比较直观, 而图表则量化了运动过程。
[5]
从动画和图表可判断机构的运动结果与设计是一致的, 从而保证了凸轮机构设计的准确性。
滑动副J003即尖顶从动件运动线图。
[8]
2
22216010*22ϕϕ=Φ=h s 22
222)60(6010*210)(2ϕϕ--=-ΦΦ-=h h s 222246010*210210ϕϕ-=Φ-=h s 22
225)60(6010*2)(2ϕϕ-=-ΦΦ=h s
图3 凸轮的运动仿真
4 导出位移和速度曲线
图4 速度曲线
该图为杆002的速度随时间的变化曲线,从中我们可以看到其运动规律。
图5 位移曲线
该图为杆002的位移随时间变化规律。
可见杆002做上下有规律的循环运动。
5 结语
利用UG 的仿真分析,不仅可以考察从动件的运动规律是否满足工作要求,而且可以通过克隆仿真方案,修改凸轮的曲线参数来改变从动件的运动规律。
[6]
当从动件的运动规律满足工作要时,再通过导出机构,更新装配主模型,从而对机构进行优化设计。
当对一些复杂的机构,很难用解析法求其某一点的运动规律时,利用UG 的仿真分析,不失为一种快捷而有效的方法。
[9]
参考文献:
[1] 盛晓敏,邓朝晖.先进制造技术[M].北京:机械工业出版社,2010.
[2] 金杰,张安阳.快速成型技术及其应用[J].浙江工业大学学报,2009,33(5):592~595.
[3] 杨叔子.先进制造技术发展与展望[J].机械制造与自动化.2008(2)
[4] 李敏贤.面向21世纪的先进制造技术[J].机械工业自动化,2009(4).
[5] 李亨昭,邱敬之.先进制造技术的发展趋势与战略设想[J].电子机械工程,2010(4).
[6] 孙大涌.先进制造技术[M].北京:机械工业出版社,2010.
[7] 马晓春.我国现代机械制造技术的发展趋势[J].森林工程,2009(3).
[8] 王世敬,温筠.现代机械制造技术及其发展趋势[J].石油机械.2009,(11).
[9] 武永利.机械制造技术新发展及其在我国的研究和应用[J].机械制造与自动化,2008,(1).
[10] Duffie N.Trends in Green Manufacting[J].CASA/SME Technology Trends,2009(12).。