基于ProE的凸轮机构运动仿真
- 格式:pdf
- 大小:479.77 KB
- 文档页数:2
摘要本课题所研究的直、摆组合凸轮机构是一种新型的机构类型,该机构通过直动从动件凸轮机构与摆动从动件凸轮机构组成联动凸轮机构,能够将主动件的转动转化为从动件上某点沿预期的曲线轨迹并以预期的运动规律运动。
在对直、摆组合凸轮机构理论分析的基础上,我们对直、摆组合凸轮机构进行了Pro/e 运动仿真,精确求解出了各凸轮的理论廓线、实际廓线及各构件结构尺寸等。
丰富了机械原理学科的设计理论及内容,适应了在机构设计方面许多学者致力于寻求凸轮机构的精确解和使凸轮曲线多样化及从动件轨迹多样化的要求。
最后,选择预期圆线轨迹为例,利用计算机辅助设计(Pro/ENGINEER)对该机构进行零、部件及总体造型分析设计,并利用Pro/ENGINEER对该直、摆组合凸轮机构进行了运动仿真,以验证理论的正确性和可行性。
因此,对直、摆组合凸轮机构进行深入地研究有着较大的理论和现实意义,有广阔的应用前景。
关键词:Pro/e应用组合机构凸轮设计运动仿真AbstractThe Z.B Combinatory Cam Mechanism is a kind of new-type mechanism, it can come into a kind of combinatory-movement mechanism which joints translation driven member cam and swing follower cam .It can translate the revolution of the driving body into a point of the driven body which has the ability to move around the anticipation curvilinear path and move based on the anticipation movement rule.Based on the theory in analyzing Z.B Combinatory Cam Mechanism,we simulate the mechanism in applying VB,solving the profile of theory,reality,cutter of cams,and the subject and dimension of all components exactly.Enriching the design-theory and content of the subject about mechanical principal .Adapting the request of many scholars in component design for searching the exact solution about cam-entity and making the cam-curve various and follower-profile various.Lastly, taking the four-leaf rose curve for example, applying the Pro/ENGINEER to design the curve, entity and motive emulate for verifying the truth and feasibility of the theory.Nowadays, researching the Z.B Combinatory Cam Mechanism, having the significance in theory and reality .The prospect is extensive.Key words:Pro/ENGINEER Application Combination Mechanism Cam Design Motive Emulate目录第一章前言---------------------------------------------------------------------------------------------------11.1 直、摆组合凸轮机构的研究意义---------------------------------------------1 1.2 凸轮机构以及组合机构的研究和发展状况------------------------------------4 1.3 Pro/ENGINEER WildFire软件的简介------------------------------------------5 1.4 本课题的主要研究内容----------------------------------------------------6 第二章直、摆组合凸轮机构基本设计及计算机辅助设计---------------------------72.1 直、摆组合凸轮机构基本设计----------------------------------------------7 2.2 直、摆组合凸轮机构凸轮各种廓线设计--------------------------------------142.2.1直动凸轮廓线求解--------------------------------------------------152.2.1.1 直动凸轮理论廓线-------------------------------------------152.2.1.2 直动凸轮实际廓线-------------------------------------------152.2.2 摆动凸轮廓线求解-------------------------------------------------162.2.2.1 摆动凸轮理论廓线-------------------------------------------162.2.2.2 摆动凸轮实际廓线-------------------------------------------16 2.3 计算机辅助设计---------------------------------------------------------16 2.4 设计举例---------------------------------------------------------------17 2.5 本章小结---------------------------------------------------------------20 第三章直、摆组合凸轮机构Pro/ENGINEER的设计-------------------------------213.1 创建凸轮模型-----------------------------------------------------------21 3.2 运动仿真的设计---------------------------------------------------------23 3.3 Pro/ENGINEER实体运动仿真-----------------------------------------------253.4 机械仿真结果分析及保存-------------------------------------------------29第四章小结----------------------------------------------------------------32 参考文献-------------------------------------------------------------------33第一章前言1.1直、摆组合凸轮机构的研究意义本课题研究的是直、摆组合凸轮机构如图1-1所示。
湖北文理学院毕业设计(论文)正文题目基于PRO/E的凸轮机构结构设计及其运动仿真分析专业机械设计制造及其自动化班级姓名学号指导教师职称┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊基于Pro/E的凸轮机构的结构设计及其运动仿真分析摘要:凸轮机构是机械中一种常用的机构,它结构简单,紧凑,工作可靠,设计方便,利用不同的凸轮轮廓线可以使从动件实现任意给定的复杂运动规律。
同时它兼有传动,导向和控制机构的各种功能和优点。
因此在包装机,纺织机,印刷机,内燃机以及农业机具等具有广泛的运用。
传统的凸轮设计有图解法和解析法,图解法形象直观,结构简单,但是手工作图选取的等分数有限,误差较大,较繁琐。
解析法设计虽然解决了凸轮设计的精度问题,但是要得到完整的凸轮轮廓线需要建立复杂的数学公式,编制复杂的程序,编程和计算工作量大。
总之,传统的运动分析法是一种间断的,静态的分析方法。
本文利用Pro/E强大的三维实体建模功能,建立凸轮机构的装配模型,然后进行运动学分析,仿真凸轮机构的运动情况,最后将所设置的构件的位移,速度,加速度变化情况以表格形式输出,通过修改仿真模型的参数,快速的修改和优化设计方案。
关键词:凸轮机构;Pro/E;三维建模;运动仿真。
┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊The cam mechanism based on Pro/E structure design andkinematics simulation analysisAbstract:the cam mechanism is a kind of commonly used mechanical mechanism, it has the advantages of simple structure, compact structure, reliable work, convenient design, using different cam contour line allows the follower to realize any given motion law of complex. At the same time it has the drive, guide and control mechanism of the various features and advantages. So in the packaging machine, textile machine, printing machine, internal combustion engines and agricultural machinery is widely used. The traditional cam design graphic method and analytic method, graphical method is visual, simple structure, but the chart manually selected score is limited, the error is large, complex. Analytic design method solves the problem of precision cam design, but to get the full cam contour line need to build a complex mathematical formula, the preparation of complex procedures, programming and calculation. In short, the traditional motion analysis is a kind of discontinuous, static analysis method. In this paper, using Pro/E powerful3D entity modeling function, establish the cam assembly model, then analyses the kinematics simulation of cam mechanism, motion, the setting member of displacement, velocity, acceleration in form of output, by modifying the parameters of the simulation model, rapid modification and optimization design.Key words: cam mechanism; Pro/E;3D modeling; motion simulation.┊┊┊┊┊┊┊┊┊┊┊┊┊装┊┊┊┊┊订┊┊┊┊┊线┊┊┊┊┊┊┊目录1前言 (1)1.1本课题研究的目的和意义 (1)1.2国内外的研究现状及发展趋势 (2)1.3研究的主要内容、途径和技术线路 (3)2凸轮轮廓线的设计 (4)2.1凸轮机构的分类 (4)2.2从动件的运动规律及选取原则 (4)2.3凸轮轮廓线的设计 (5)2.3.1凸轮轮廓线设计方法的基本原理 (5)2.3.2凸轮轮廓曲线的计算 (5)2.4凸轮机构基本尺寸的确定 (7)2.5滚子半径的选择 (8)3凸轮机构的实体建模与装配 (10)3.1Pro/E软件简介.............................. 错误!未定义书签。
基于Creo的凸轮机构三维参数化设计及运动仿真刘鹏冯立艳李静卢家宣蔡保杰冷腾飞苗伟晨(华北理工大学以升创新基地河北·唐山063210)摘要本文主要介绍用Creo对凸轮机构进行参数化设计并以圆柱槽状凸轮机构为例进行运动仿真,再通过C#软件完成人机交互,即操作人只需在程序界面输入槽状凸轮相应参数即可完成凸轮的三维建模,从而绘制出相应的位移、速度、加速度曲线进入仿真和分析环节。
这样即缩短了凸轮的设计周期提高了设计质量,并且解决了凸轮教学课程存在的设备成本高、设备数量少、实验时间和空间受限等难题。
关键词凸轮Creo参数化仿真中图分类号:TP391.9文献标识码:A1基于Creo软件下的凸轮三维建模1.1Creo环境下槽状凸轮机构三维参数化造型基本思路(1)参数化过程需准备可变参数包括行程、推程角、远休角、回程角、近休角、外径、壁厚、基底高度、凸轮高度、槽深、槽宽,以上变量成为参数组。
(2)通过根据凸轮不同运动规律编写推程、远休止、回程、近休止段凸轮轮廓线方程,本例应用的凸轮推程回程为正弦加速度运动规律。
(3)分段绘制出理论轮廓曲线,将各段曲线首尾相连封闭,即为完整的凸轮理论廓线。
(4)生成凸轮实体;加入参变量,实现参数化。
1.2三维建模具体步骤Creo是如今今应用最广的三维绘图软件之一,主要用于参数化实体设计,它所提供的功能包括实体设计、曲面设计、零件装配、建立工程图、模具设计、、电路设计、装配管件设计、加工制造和逆向工程等。
其系统特性主要包含单一数据库、全参数化、全相关、基于特征的实体建模等,不仅能实现零件的参数化设计,也可以方便地建立各零部件的通用件库和标准件库,从而提高设计的效率和质量。
1.2.1槽状凸轮机构的三位参数化建模自行设定初步参数组,注意推程角、远休角、回程角、近休角之和为360,(2)运行creo软件,新建零件,进入界面。
(3)选择【工具:程序】,出现菜单管理器,选择编辑设计,出现记事本,在IN PUT和END PUT语句中间输入语句,然后存盘,确认将所做的修改体现到模型中,最后在菜单管理器中输入设定的初步参数值。
基于Pro/E的凸轮参数化设计及ADAMS仿真摘要:基于Pro/ E 平台下进行凸轮的实体参数化设计,并应用ADAMS进行系统仿真,对相关产品的设计提供设计思路和借鉴作用。
关键词:Pro/E;凸轮;参数化;ADAMS1、前言Pro/ENGINEER是目前最先进的计算机辅助设计(CAD)、制造(CAM)和分析(CAE)软件,该系统是一个参数化、基于特征的实体造型系统,并且具有单一数据库功能。
该功能就是将每一个尺寸看作可变参数,而尺寸驱动是参数化设计的重要特点。
所谓尺寸驱动就是以模型的尺寸来决定模型的形状,一个模型由一组可变的尺寸进行定义。
这样只要修改这些参数尺寸,相关模型就会依照尺寸的变化重新生成,达到设计变更的一致性,从而避免或减少重复劳动。
利用虚拟样机仿真分析软件ADAMS的MECHANISM/Pro(Pro/E接口)模块进行系统运动学或动力学仿真,并进行干涉检查,确定运动锁定的位置,计算约束副的作用力等等,从而使产品开发阶段就可以帮助设计者发现设计缺陷,并提出改进的方案,提高产品的可靠性。
使用MECHANISM/Pro(Pro/E接口)模块进行运动学或动力学仿真分析时,一般遵循以下几个步骤①创建或打开Pro/ENGINEER装配模型;②定义刚体;③创建约束副;④添加驱动;⑤应用载荷和弹性连接器;⑥传送模型;⑦观察分析结果。
2、Pro/ENGINEER参数化的凸轮设计凸轮机构由于其结构简单、紧凑,而且从动件的运动规律完全取决于凸轮的轮廓曲线,所以在设计时只要设计适当的轮廓,便可使从动件获得所需的运动规律,因此在机械行业中有的广泛的应用。
设计凸轮轮廓的方法主要有作图法和解析法两种,随着计算机技术的发展,现在几乎都是采用解析法设计凸轮轮廓,同时也解决了采用作图法存在的精度问题。
而在Pro/E中可以通过建立方程式生成各段曲线,然后通过各曲线段扫描生成凸轮的实际轮廓曲面,这样设计出的凸轮模型,可以通过改变不同的参数从而获得不同的凸轮实体。
湖北文理学院毕业设计(论文)正文题目基于PRO/E的四缸内燃机凸轮配气机构的结构设计及运动仿真分析专业机械设计制造及其自动化班级机制0812班姓名学号指导教师职称2012年5 月23日基于PRO/E的四缸内燃机凸轮配气机构的结构设计及运动仿真分析摘要:配气机构作为内燃机的重要组成部分,其设计合理与否直接关系到内燃机的动力性能、经济性能、排放性能及工作的可靠性、耐久性。
随着内燃机高功率、高速化,人们对其性能指标的要求越来越高,要求其在高速运行的条件下仍然能够平稳、可靠地工作,因而对其配气机构提出了更高的要求。
配气凸轮型线是配气机构的核心部分,配气凸轮型线设计是配气机构优化设计的重要途径之一。
模拟计算和实验研究是内燃机配气机构研究两种重要手段。
运用多体力学的方法对配气机构进行了动态仿真分析,采用数字多体程序的方法,建立了配气系统的理论模型,进行配气机构的运动学、动力学分析,除了得到气门的升程、速度、加速度外,还考虑了摇臂与气门之间的碰撞,以及摇臂支座的柔性。
因此得到气门与摇臂之间的碰撞力,摇臂支座的柔性衬套的受力,气门弹簧力,凸轮轴支座反力,气门座反力及凸轮与摇臂之间的压力角等。
为凸轮型线、摇臂形状和整个配气机构的设计改进提供了重要依据。
利用pro/e强大的分析仿真功能, 对凸轮式配气机构的运动特性以及弹簧刚度对系统运动的影响进行了仿真分析, 得出弹簧刚度与气门振动的关系图, 为改善系统动力学性能和关键零部件设计提供了依据。
利用计算机软件仿真, 有利于降低研发成本并缩短产品的开发周期。
关键词:内燃机;配气机构;凸轮型线;优化设计;汽车;发动机;配气系统;顶置凸轮;动态仿真Based on the PRO / E four cylinder internal combustionengine cam mechanism design and motion simulationanalysisAbstract:The valve train is one of the most important mechanisms in a internal combustion engine, whether the performances are good or bad, that affecting the power performance, economic performance, emissions performance of the engine, as well as affecting the reliability and wear performances of the whole engine. Along with the requests of the engine’s high power, super-speed, people demand a higher index. That is, when the engine runs under a high speed, it can still work steadily and dependably, which demand that the valve train system should have a high performance. Cam profile is the hard core of the valve train, which design is one of the important ways to carry out valve train optimal design. Simulation calculation and experimentation research are two important ways to carry out research and development on valve train of internal-combustion engine.Valve-train has been dynamically simulated by the multi-body method.A theory model has been built for the valve train by using the digital multi-body program.Not only the lift height,speed and acceleration of valve but also the collision between valve and rocker and the flexibility of rocker support are taken into account.Therefore, the collision force between valve and rocker ,loading on the flexible bearing of rocker support, valve spring force, can support counter - force, valve ring counter - force and direction angle of acting force between cam and rocker have been carried out. The important basis on design improvement for cam profile, rocker form and valve form and valve train have been provided.This paper analyzed the dynamic characteristics of a cam-type valve t rain and the influence o f the spring stiffness on the systematic mot ion by using Pr o / E .The relationship between stiffness of spring and vibration of valve was got ten. The work ha s provided a basis for improving the system's dynamic char act eristics and designing the key components. T hereby , computer simulation can cut down the pro duct cost and shorten the development cycle.Key words:Internal combustion engine; Valve train; Cam profile; Optimal design;Automobile Engine Valve -train system Overhead camshaft Dynamic simulation目录1绪论 (5)1.1本课题研究的目的和意义 (5)1.2配气机构优化设计的目的及意义 (6)2基于PRO/E的配气机构的结构设计 (7)2.1配气机构总体骨架设计 (7)2.2凸轮轴设计 (9)2.3凸轮的设计 (9)2.4挺杆的设计 (9)2.5推杆的设计 (9)2.6气门杆的设计 (10)2.7弹簧的设计 (10)2.8使用PRO/E创建配气机构的相关元件 (11)3配气机构的装配 (15)3.1首先装配凸轮轴并准确定位 (15)3.2装配平底从动件 (16)3.3装配弹簧 (17)3.4装配汽门挺杆 (18)4四缸内燃机凸轮配汽机构动态仿真分析 (20)4.1内燃机凸轮配汽机构运动仿真准备工作 (20)4.2内燃机凸轮配汽机构运动仿真分析 (21)5本文总结 (27)参考文献 (29)致谢 (30)1绪论1.1 本课题研究的目的和意义现代内燃机不断向高速高强度方向发展. 作为内燃机三大机构之一的配气机构, 如果设计不当, 势必产生很大的冲击、振动、噪音, 严重时, 气门会产生反跳与飞脱, 这将严重影响到内燃机的动力性与经济性. 同时, 由于速度的提高, 凸轮机构的润滑与磨损也成为一个不可忽视的问题. 现代大功率柴油机普遍采用下置凸轮轴式配气机构,配气机构的好坏又对柴油机的性能指标、可靠性及寿命有着很大的影响,其设计是否优良直接影响柴油机的性能指标。
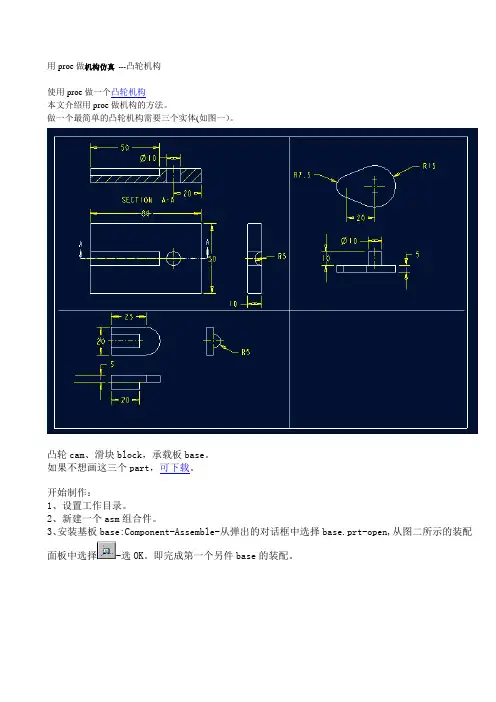
用proe做机构仿真---凸轮机构使用proe做一个凸轮机构本文介绍用proe做机构的方法。
做一个最简单的凸轮机构需要三个实体(如图一)。
凸轮cam、滑块block,承载板base。
如果不想画这三个part,可下载。
开始制作:1、设置工作目录。
2、新建一个asm组合件。
3、安装基板base:Component-Assemble-从弹出的对话框中选择base.prt-open,从图二所示的装配面板中选择-选OK。
即完成第一个另件base的装配。
4、安装凸轮:Component-Assemble-从弹出的对话框中选择cam.prt-open,从图二所示的装配面板中点选Connections出现连接面板(图三)。
(图三)5、接上一步做销钉Pin连接:从绘图区点选凸轮上的圆柱体的圆柱面、接着点选base上10mm孔的圆柱机,紧接着分别点选凸轮与基板的两个接触平面,在连接面板输入值为0。
应该象下图这个样子后先OK完成销钉的连接。
好了,到这一步我们终于做完了第一个机构了。
事实上用这两个part就可做动画了。
下面先试一下一个关键帧动画。
proe提供两种方式做动画,一个是纯动画,好象Flash那样使用关键帧。
另一种是使用驱动方法,下面先介绍一下纯动画的制作方法。
我们要做的事情是使这个凸轮转动。
a、从菜单上选Applications,从下拉菜单中选择Animation(注:如果没有出现Animation,是因为没有安装动画模块,那么这一步做不成,请先安装好动画模块),出现如图动画控制工具箱。
b、点选动画工具箱中的拖拽工具,出现Drag面板如下图。
在Drag面板中点选照相机按钮,这样就创建好了第一个原始位置的关键帧照片。
再拍一次,作为最后一帧。
c、在绘图区直接拖拽凸轮,使其顺时针旋转90度左右,然后点相机按钮拍一次照。
d、重复第上一步分别在180度270度拍一次照。
e、在Drag面板中将Snapshot2改为Snapshot6.-close。
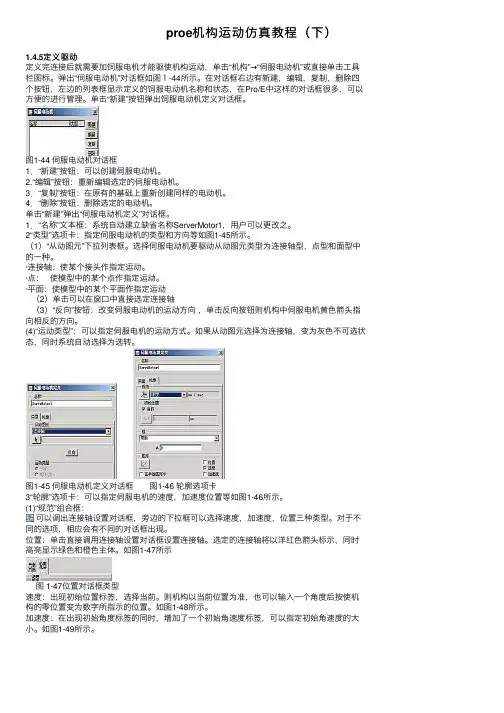
proe机构运动仿真教程(下)1.4.5定义驱动定义完连接后就需要加饲服电机才能驱使机构运动,单击“机构”→“伺服电动机”或直接单击⼯具栏图标。
弹出“伺服电动机”对话框如图1-44所⽰。
在对话框右边有新建,编辑,复制,删除四个按钮,左边的列表框显⽰定义的饲服电动机名称和状态,在Pro/E中这样的对话框很多,可以⽅便的进⾏管理。
单击“新建”按钮弹出饲服电动机定义对话框。
图1-44 伺服电动机对话框1.“新建”按钮:可以创建伺服电动机。
2.“编辑”按钮:重新编辑选定的伺服电动机。
3.“复制”按钮:在原有的基础上重新创建同样的电动机。
4.“删除”按钮:删除选定的电动机。
单击“新建”弹出“伺服电动机定义”对话框。
1.“名称”⽂本框:系统⾃动建⽴缺省名称ServerMotor1,⽤户可以更改之。
2“类型”选项卡:指定伺服电动机的类型和⽅向等如图1-45所⽰。
(1)“从动图元”下拉列表框。
选择伺服电动机要驱动从动图元类型为连接轴型,点型和⾯型中的⼀种。
·连接轴:使某个接头作指定运动。
·点:使模型中的某个点作指定运动。
·平⾯:使模型中的某个平⾯作指定运动(2)单击可以在窗⼝中直接选定连接轴(3)“反向”按钮:改变伺服电动机的运动⽅向,单击反向按钮则机构中伺服电机黄⾊箭头指向相反的⽅向。
(4)“运动类型”:可以指定伺服电机的运动⽅式。
如果从动图元选择为连接轴,变为灰⾊不可选状态,同时系统⾃动选择为选转。
图1-45 伺服电动机定义对话框图1-46 轮廓选项卡3“轮廓”选项卡:可以指定伺服电机的速度,加速度位置等如图1-46所⽰。
(1)“规范”组合框:可以调出连接轴设置对话框,旁边的下拉框可以选择速度,加速度,位置三种类型。
对于不同的选项,相应会有不同的对话框出现。
位置:单击直接调⽤连接轴设置对话框设置连接轴。
选定的连接轴将以洋红⾊箭头标⽰,同时⾼亮显⽰绿⾊和橙⾊主体。
如图1-47所⽰图 1-47位置对话框类型速度:出现初始位置标签,选择当前。
目录中文摘要 (I)英文摘要 (II)第1章任务与课题条件 (1)1.1任务 (1)1.2课题条件 (1)第2章凸轮机构及PRO/E简介 (2)2.1凸轮机构简介 (2)2.2 PRO/E简介 (7)第3章盘形凸轮创建过程 (10)3.1新建零件 (10)3.2创建拉伸特征 (10)3.3创建方程曲线 (10)3.4创建图形特征 (11)3.5创建可变剖面扫描特征 (12)3.6创建孔特征 (12)第4章其余零件设计 (14)4.1从动杆设计 (14)4.2连杆设计 (14)4.3滑块设计 (15)第5章装配 (16)第6章机构仿真 (17)6.1定义凸轮从动连接机构. (17)6.2添加驱动器 (17)第7章运动分析及结果分析 (20)7.1运行分析 (20)7.2结果回放 (21)7.3结果分析 (22)结论 (25)参考文献 (26)致谢 (27)摘要机械产品的运动分析和仿真在机械产品的设计中是不可缺少的重要环节。
在各类机械的传动结构中,凸轮结构有着广泛的应用,根据凸轮机构的设计原理,提出了在pro/e 中实现凸轮设计及实体造型的方法,并主要利用Pro/e Wildfire的运动学分析模块Mechanism对凸轮机构进行了运动学分析和仿真,这对凸轮机构的优化设计将提供较大的帮助。
本文通过对对心直动尖顶盘型凸轮机构进行运动仿真分析,更加明确了该机构的优缺点,对于该机构的优化设计以及该机构以后的用途将提供指导作用。
关键词:凸轮机构 Pro/E 运动仿真运动分析AbstractSimulation technology in the mechanical products design plays an important role. In some mechanical transmission structures,the cam mechanism is used widely, Introducs the method of cam design and modeling in Pro/E,and mainly expiains the kinematics analysis and the simulasion by using Pro/E Wildfire Mechanism ,it will provide useful help to the optimized design of cam mechanism. This article through to the heart of translational knife-edge plate cam mechanism motion simulation analysis, more clearly the advantages and disadvantages, for the optimal design of the mechanism as well as the agency later use will provide guidance.Key Words:cam mechanism ;Pro/E;motion simulation;motion analysis第1章任务与课题条件1.1 任务为了对凸轮机构进行更好的优化设计以及对凸轮机构以后的应用起指导作用,因此基于pro/e对盘型凸轮机构进行设计与运动仿真,并对速度和加速度进行分析,研究该盘型凸轮机构的运动情况,并对该凸轮机构以后的应用作出预测。
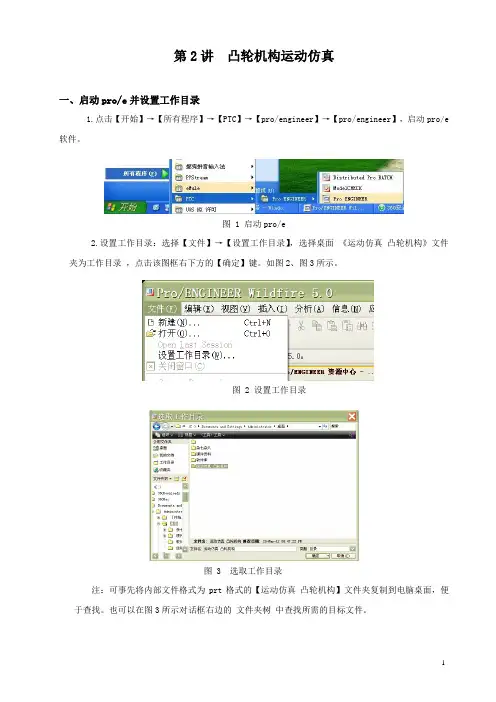
第2讲凸轮机构运动仿真一、启动pro/e并设置工作目录1.点击【开始】→【所有程序】→【PTC】→【pro/engineer】→【pro/engineer】,启动pro/e 软件。
图 1 启动pro/e2.设置工作目录:选择【文件】→【设置工作目录】,选择桌面《运动仿真凸轮机构》文件夹为工作目录,点击该图框右下方的【确定】键。
如图2、图3所示。
图 2 设置工作目录图 3 选取工作目录注:可事先将内部文件格式为prt格式的【运动仿真凸轮机构】文件夹复制到电脑桌面,便于查找。
也可以在图3所示对话框右边的文件夹树中查找所需的目标文件。
二、新建加工文件1.点击【文件】→【新建】命令,选择类型为【组件】,子类型选择【设计】,将名称改为tulun0912,将【使用缺省模板】前的对勾去掉,如图4所示。
单击【确定】后弹出【新文件选项】对话框,【模板】选mmns asm design,单击【确定】完成任务的新建,如图5所示。
图 4 新建组件图 5 选择单位制三、零件的装配1.预览整个机构效果图单击工作窗口右边工具栏中的【装配】命令,在【打开】命令中单击【cams.asm】项。
单击【预览】可在框图中查看整个凸轮机构组装好后的效果图,后面的组装皆可按此标准来进行。
图 6 机构效果图2.安装基座(1)单击工作窗口右边的【装配】命令,在【打开】命令中选择groun.prt文件,即机座(也可以先行【预览】确认一下),点击【打开】,如图7所示。
图 7 选择机座(2)导入机座后单击图8中所示【自动】命令右边小三角形,将机座设置为【缺省】模式,当状态栏显示完全约束时,点击面板右端的对勾,完成机座的放置,如图8所示。
图 8 选择缺省3.凸轮的安装(1)同上点击【装配】选中并打开打开第二个文件cam.prt,即凸轮机构,点击工具栏旁的【用户定义】下拉菜单,选择【销钉】连接类型,如图9所示。
图 9 选择销钉连接(2)先进行轴对齐,即选择机座机架上凸台的中心线A-1,再选择凸轮的中心线A-1,完成轴对齐。
学号14071900465毕业设计(论文)题目:基于Pro/E的CNC自动换刀装置组合凸轮机构建模及仿真研究作者胡庆届别2011 届院别机械工程学院专业机械设计制造及其自动化指导教师谭华职称讲师完成时间2011年5月摘要文章首先对目前主流三维设计软件 Pro/Engineer 主要特性进行分析研究,了解计算机仿真的概念、特点及其应用;接着,针对CNC自动换刀系统,着重分析了其双半球形滚子齿式弧面凸轮分度机构结构特点和工作原理,为运动仿真制作奠定基础;继而,以理论分析为基础,提出设计方案。
包括运动规律、共轭特征、点啮合方程、接触轨迹和接触域等。
编写 Pro/Program 程序,实现零件的参数化建模,并提供用 Pro/Program 实现参数化建模的一般方法,对以后建造特征类似的三维模型,在缩短造型周期,节约造型时间方面,具有一定的实用价值;最后,用 Pro/Engineer 对双半球形滚子齿式弧面凸轮机构和ATC其他部件进行实体建模,通过运动仿真,证实所设计的系统具有良好的运动性能,达到预期设计目标。
关键词:Pro/E;自动换刀装置;空间凸轮机构;双半球形滚子齿式弧面凸轮ABSTRACTFirst of all, the paper analyze the main characteristics of the currentmainstream three-dimensional design software—Pro/Engineer and introduce the computer simulation conception, characteristics and applications. Secondly, focus on analyzing institutions of Double hemispherical roller wall-climbing CAM,in order to laying the foundation of motion simulation. Thirdly, Based on theoretical analysis, and presents the design scheme. Including motion, conjugate characteristics, some meshing equation, contact trajectory and contact domain, etc build their geometric math model, compile the Pro/Program procedures, accomplish the parametric modeling of parts, and provide the method of parametric modeling by using Pro/Program module. All these works would have some practical value on reducing the modeling cycle, saving design time when building three-D model with similar characteristics. Finally, Using Pro/e triturated according to double hemispherical roller CAM and ATC wall-climbing entity modeling, other parts through sports simulation, confirmed by design system has good sports performance and achieve expected design goal.Keywords:Pro/Engineer; Automatically change tool device ; Spatial CAM ; Double hemispherical roller CAM curve analysis目录摘要 (I)ABSTRACT (II)1 绪论 (1)1.1 Pro/Engineer 简介 (1)1.2 运动仿真概述 (3)1.2.1 计算机仿真的基本概念及特点 (3)1.2.2 计算机仿真技术应用 (3)1.3课题研究的背景及意义 (4)1.4主要研究内容和主要工作 (5)2 CNC自动换刀系统总体概况 (6)2.1 加工中心自动换刀装置的发展和特点 (6)2.2 凸轮式自动换刀装置的特点 (6)2.3空间凸轮机构简介 (6)2.3.1 凸轮结构原理 (7)2.3.2凸轮机构特点 (7)2.4 ATC的作用及其组成 (7)2.4.1 ATC的作用 (7)2.4.2 ATC的主要组成 (8)3 运动循环的设计及分析 (11)3.1 确定换刀机械手的运动循环 (11)3.2 确定运动循环组成区段 (11)3.3 确定运动循环内各段的分配轴转角及时间 (12)3.4运动循环图的优化设计 (12)4 数学模型的建立 (14)4. 1凸轮从动件运动规律 (14)4.1.1 凸轮从动件常用运动规律分析 (14)4.1.2 自动换刀机械手中凸轮从动件运动规律的选择 (14)4.2双半球形滚子齿式弧面凸轮分度机构的啮合原理 (15)4.2.1 坐标系的建立 (15)4.2.2 共轭条件及其廓面方程的求解 (17)4.2.3双半球滚子齿式弧面凸轮分度机构的啮合特性分析 (18)4.3媒介点啮合的技术 (21)4.3.1媒介点啮合的由来 (21)4.3.2 点啮合的媒介共轭方法 (21)4.4 媒介点啮合的诱导曲率和接触域 (23)4.4.1 点啮合的诱导曲率 (23)4.4.2点啮合的接触迹 (24)4.5双半球形滚子齿式弧面凸轮分度机构的点啮合方法 (27)4.5.1双半球形滚子齿式弧面凸轮分度机构点啮合方案构思 (27)4.5.2 双半球形滚子齿式弧面凸轮分度机构的接触迹 (28)4.5.3 双半球形滚子齿式弧面凸轮分度机构的诱导曲率和接触域 (29)5基于Pro/E的空间凸轮机构仿真 (32)5.1机构参数 (32)5.2空间凸轮理轮廓面 (32)5.3 凸轮机构实体模型的建立 (33)5.3.1弧面凸轮胚体的建立 (33)5.3.2 分度盘实体模型的建立 (34)5.4 建立运动关系 (35)5.5空间凸轮轮廓面 (37)5.6弧面凸轮分度机构的仿真及分析 (38)5.6.1创建凸轮随动件连接 (38)5.6.2 定义伺服马达 (39)5.6.3 运动仿真及分析 (39)6结论 (40)参考文献 (41)致谢 (43)附录英文翻译 (44)1 绪论1.1 Pro/Engineer 简介Pro/Engineer系统是由美国参数化技术公司PTC(Parametric Technology Corporation)生产的优秀产品,提供了产品的三维模型设计、加工、分析及制图等功能完善的CAD/CAE/CAM解决方法。
用Pro/E做机构运动仿真————凸轮机构一、做一个简单的凸轮机构需要三个实体凸轮cam、滑块block,承载板base。
(如下图所示)。
承载板base凸轮cam滑块block图1 凸轮组件零件图二、开始制作:1、设置工作目录。
2、新建一个asm组合件。
3、安装基板base零件:选择“插入/元件/装配”,从弹出的对话框中选择base.prt,从图二所示的装配面板中选择方式,即缺省方式。
即完成第一个零件base的装配。
4、安装凸轮:选择“插入/元件/装配”,从弹出的对话框中选择cam.prt,从图二所示的装配面板中点选“连接”出现连接面板(图三)。
5、接上一步,在连接类型中选择“销钉Pin”连接,要完成“销钉”连接,必须进行两个约束,即第一是“轴对齐”约束,可从绘图区点选凸轮上的圆柱体的圆柱面、接着点选基体上圆柱孔的圆柱表面(也可分别选择凸轮上圆柱体的轴线及基体上圆柱孔的轴线);第二个约束是“平移”,可分别点选凸轮与基板的两个接触平面,在连接面板输入偏移值为0。
单击“确定”完成“销钉”连接。
其连接效果如图4所示。
6、安装滑块:选择“插入/元件/装配”,从弹出的对话框中选择block.prt,从图二所示的装配面板中点选“连接”出现连接面板(图三)。
在连接面板中的“类型”选项下选择“滑动杆”。
7、点选滑块零件上的圆柱表面,紧接着选基体零件上的圆弧槽的圆柱面作为“轴对齐”限制条件,接着分别选两个接触平面作为“旋转”限制条件,偏移值为0。
如图5所示。
8、在连接面板(图三)中选“移动”选项卡。
拖拽滑块大致到这个图6这个位置,从而完成了我们凸轮机构的连接工作。
图2 装配面板对话框图3 连接面板对话框图4 凸轮与基体连接后的效果图图5 滑块的连接图6 滑块拖动后的位置。