zsource 非线性讲解
- 格式:pdf
- 大小:1001.80 KB
- 文档页数:6

XML的四种解析器原理及性能比较XML是一种标记语言,用于描述和传输结构化的数据。
解析器是将XML文档解析成计算机能够理解的数据结构的工具。
XML解析器有四种常见的类型,分别是:DOM解析器、SAX解析器、StAX解析器和Pull解析器。
以下将对这四种解析器的原理和性能进行比较。
1. DOM解析器(Document Object Model):DOM解析器将整个XML文档加载到内存中,生成一棵树形结构的文档对象模型(DOM树)。
通过DOM树,可以对XML文档进行遍历、读取和修改。
DOM解析器的优点是易于使用和理解,缺点是占用较大的内存空间,对大型XML文档解析速度慢。
2. SAX解析器(Simple API for XML):SAX解析器是一种事件驱动的解析器,它通过逐行读取XML文档并触发事件来解析XML。
当解析器遇到元素时,会产生相应的事件,应用程序可以注册事件处理器来执行相关操作。
SAX解析器的优点是速度快,占用少量内存,适用于大型XML文档。
缺点是编码相对复杂,需要开发者自行处理解析事件。
3. StAX解析器(Streaming API for XML):StAX解析器是一种基于迭代器的解析器,提供了流式的XML处理方式。
它允许应用程序以推(pull)的方式逐行解析XML文档。
StAX解析器提供了两个核心接口:XMLStreamReader和XMLStreamWriter,分别用于读取和写入XML文档。
StAX解析器的优点是速度快,占用较少内存,适用于大型XML文档。
缺点是相对复杂,需要开发者主动控制解析过程。
4. Pull解析器:Pull解析器也是一种基于迭代器的解析器,类似于StAX解析器。
它通过迭代器(PullIterator)的方式逐行读取和处理XML文档。
相比StAX解析器,Pull解析器更加轻量级,占用更少的内存。
然而,Pull解析器的功能相对有限,仅提供了基本的解析功能。
在性能方面,DOM解析器通常需要将整个XML文档加载到内存中,适用于小型XML文档,而对于大型XML文档,DOM解析器的性能较低。

Visual SourceSafe 入门教学作者:蔡焕麟来源:CSDN1. 简介在软件工程的领域里,有一块叫做 SCM(Software Configuration Management),有人管它叫「软件建构管理」。
SCM 的传统定义是原始码的版本管理,后来则逐渐演进扩大,还包含了软件开发的一些标准和程序的制定与应用 [Summerville 2000]。
版本管理工具对目前的软件开发开环境来说相当重要,因为不管是软硬件环境的改变、需求改变、软件本身的 bug...等等,都会令软件不断地演进,我们必须记录各个版本,以便随时比对版本之间的差异,或者回到(rollback to)过去的某个版本;此外,当项目小组成员众多时,工作交接、多人修改同一个档案等情况,都有可能造成档案的版本混乱。
例如一支程序本来由张三撰写,可是因为某些原因(请假、临时支持其它项目、请别人debug....)暂时由李四修改,后来又交回给张三。
如果用传统的档案共享机制,每次有这种情形就要互相通知:我改好啰,请把档案从档案服务器搬回你家,万一有人忘了,可能就会造成档案版本错乱,而东西交到客户手上才发现 bug 依然存在。
因此,如果你曾碰过下列情形,而且深感困扰,你可能就需要版本管理工具的协助:档案不见了(用鼠标拖放档案时误动作,不知道拖去哪儿放了);档案被别人覆盖;想要比对各版本之间有何差异;想要回到之前修改的版本(客户反复无常,设计改来改去....);多人同时修改造成的版本混乱;想要知道谁动过的我的程序代码;跨项目共享组件或模块散落在各处。
目前市场上的版本管理工具已经有很多,环肥燕瘦任君挑选,以下几个可能是大家比较熟悉的:Rational Clear CaseBorland StarTeamMerant PVCS Version ManagerMicrosoft Visual SourceSafe(VSS)Concurrent Versions System(CVS)CVS 虽然免费,也有窗口接口,但是入门门坎还是偏高,不易入手,以 unix/linux 社群用得较多;StarTeam 和 ClearCase 功能较强大,价格当然也较贵;PVCS 个人也没使用过,无法提供意见;而 Visual SourceSafe(VSS)功能虽然比较阳春,但是笔者试用之后,觉得如果只需要管理多人开发时的文件和原始码版本,其实还挺好用的,也很容易上手。
林轩田《机器学习基石》课程笔记12NonlinearTransformation上一节课,我们介绍了分类问题的三种线性模型,可以用来解决binary classification和multiclass classification问题。
本节课主要介绍非线性的模型来解决分类问题。
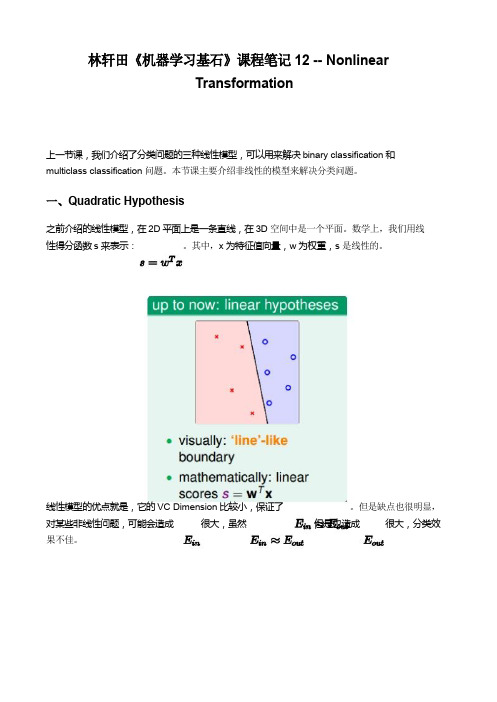
一、Quadratic Hypothesis之前介绍的线性模型,在2D平面上是一条直线,在3D空间中是一个平面。
数学上,我们用线性得分函数s来表示:。
其中,x为特征值向量,w为权重,s是线性的。
线性模型的优点就是,它的VC Dimension比较小,保证了。
但是缺点也很明显,对某些非线性问题,可能会造成很大,虽然,但是也造成很大,分类效果不佳。
为了解决线性模型的缺点,我们可以使用非线性模型来进行分类。
例如数据集D不是线性可分的,而是圆形可分的,圆形内部是正类,外面是负类。
假设它的hypotheses可以写成:基于这种非线性思想,我们之前讨论的PLA、Regression问题都可以有非线性的形式进行求解。
下面介绍如何设计这些非线性模型的演算法。
还是上面介绍的平面圆形分类例子,它的h(x)的权重w0=0.6,w1=1,w2=1,但是h(x)的特征不是线性模型的,而是。
我们令,,,那么,h(x)变成:这种的转换可以看成是x空间的点映射到z空间中去,而在z域中,可以用一条直线进行分类,也就是从x空间的圆形可分映射到z空间的线性可分。
z域中的直线对应于x域中的圆形。
因此,我们把这个过程称之为特征转换(Feature Transform)。
通过这种特征转换,可以将非线性模型转换为另一个域中的线性模型。
已知x域中圆形可分在z域中是线性可分的,那么反过来,如果在z域中线性可分,是否在x域中一定是圆形可分的呢?答案是否定的。
由于权重向量w取值不同,x域中的hypothesis可能是圆形、椭圆、双曲线等等多种情况。
第三部分非线性分析第一章非线性有限元概述1.1非线性行为1、 非线性结构的基本特征是结构刚度随载荷的改变而变化。
如果绘制一个非线 性结构的载荷一位移曲线,则 力与位移的关系是非线性函数。
2、 引起结构非线性的原因:a 几何非线性:大应变,大位移,大旋转 (例如钓鱼竿的变形)b 材料非线性:塑性,超弹性,粘弹性,蠕变c 状态改变非线性:接触,单元死活3、 非线性行为一一分析方法特点A 不能使用叠加原理!B 结构响应与路径有关,也就是说加载的顺序可能是重要的。
C 结构响应与施加的载荷可能不成比例。
1.2非线性分析的应用1、 一些典型的非线性分析的应用包括: 非线性屈曲失稳分析金属成形研究碰撞与冲击分析制造过程分析(装配、部件接触等)材料非线性分析 (塑性材料、聚合物)2、 橡胶底密封:一个包含几何非线性(大应变与大变形),材料非线性(橡胶), 及状态非线性(接触)的例子。
2.1非线性方程组的解法1、求解一个结构的平衡问题通常等于求解结构的总位能的驻值 问题。
结构总位能n : 口 "3弋门心 2、 增量法:就是将荷载分成一系列的荷载增量,即 ANSYS 中的荷载步或荷载子 步。
A 要点:在每一个荷载增量求解完成后,继续进行下一个荷载增量之前, 刚度矩阵以反映结构刚度的变化。
B 增量法的优点:可以追踪结构变形历程,这对于材料或几何非线性(特别是 极限值屈曲分析)十分有用。
C 增量法的缺点:随着荷载步增量的增加而产生积累误差,导致荷载-位移曲 线飘移。
D 对飘移进行平衡修正,可以大大提高增量法的精度。
应用最广的就是在每一 级载荷增量上用Newton-Raphsor 或其变形的迭代法。
3、 迭代法:割线刚度法:收敛性差,因此很少应用切线刚度法Newto n-Ra phsor 迭代法:切向刚度法中 2.2 Newto n-Ra phsor 迭代法 1、 优点:对于一致的切向刚度矩阵有 二次收敛速度。

grid_sample 原理grid_sample是深度学习中常用的图像处理操作之一,其原理是基于空间变换网络(Spatial Transformer Network,简称STN)的一种操作。
STN是一种能够自动学习图像几何变换的网络模块,而grid_sample则是STN的核心组成部分,用于实现对输入图像进行采样的功能。
我们来了解一下STN的原理。
STN的目标是通过学习一个空间变换的函数,使得输入图像能够更好地适应模型的需求。
在STN中,空间变换分为两个步骤:定位网络(Localization Network)和网格生成器(Grid Generator)。
定位网络用于学习输入图像中感兴趣区域的位置参数,而网格生成器则根据这些位置参数生成采样网格。
最后,grid_sample操作根据采样网格对输入图像进行采样,得到经过空间变换后的图像。
具体来说,定位网络的输入是原始图像,经过一系列卷积和全连接层后,输出一个6维向量,用于表示空间变换的参数。
这6维向量包括平移、旋转和缩放等变换参数。
通过学习这些参数,模型能够自动发现图像中的感兴趣区域并进行相应的变换。
而网格生成器则根据定位网络输出的参数,生成一个采样网格。
采样网格是一个二维矩阵,其中每个元素对应输入图像中的一个像素点,通过对每个像素点进行插值操作,可以得到输出图像中对应位置的像素值。
接下来,我们详细介绍一下grid_sample操作的原理。
grid_sample操作的输入包括两个部分:输入图像和采样网格。
输入图像是一个四维张量,包括批次数、通道数、高度和宽度四个维度。
而采样网格是一个三维张量,包括批次数、高度和宽度三个维度。
grid_sample操作的输出也是一个四维张量,与输入图像具有相同的形状。
输出的每个像素点的值是通过对输入图像的插值操作得到的。
grid_sample操作的实现过程如下:首先,对于输出图像中的每个像素点,根据其在输出图像中的位置,通过采样网格找到对应的输入图像中的位置。
非线性分析非线性分析是一种重要的数学方法,用于研究非线性系统的行为和性质。
它可以应用于各个领域,如物理学、化学、生物学和工程学等,以帮助我们理解和解释实际问题的动态。
本文将介绍非线性分析的基本概念、方法和应用,并探讨其在科学研究和实际应用中的重要性。
首先,让我们了解一下什么是非线性系统。
在物理学中,线性系统的行为可以用线性方程和线性代数的方法进行描述和分析。
而非线性系统的行为则无法简单地通过线性方法理解和解释。
非线性系统的行为具有复杂性和多样性,可能出现混沌、周期性运动以及其它非线性特征。
非线性分析的核心概念是映射和轨道。
映射描述了系统在不同时刻的状态之间的转换关系,而轨道则描述了系统在时间上的变化。
通过对映射和轨道进行分析,我们可以揭示系统的动力学行为和特征。
非线性分析有许多重要的方法和工具,其中一种基本方法是相空间重构。
相空间重构可以将非线性系统的时间序列数据转换为相空间中的轨道,并通过轨道分析方法来了解系统的动态性质。
相空间重构的关键是确定延迟时间和嵌入维度,这决定了轨道在相空间中的分布和形状。
另一个重要的非线性分析方法是Lyapunov指数。
Lyapunov指数可以用来衡量系统的稳定性和混沌性。
正的Lyapunov指数表明系统是不稳定的,而负的Lyapunov指数表明系统是稳定的。
当Lyapunov指数为零时,系统可能存在周期性运动。
在实际应用中,非线性分析具有广泛的应用价值。
例如,在天气预测中,非线性分析方法可以帮助我们理解和预测大气系统的复杂动态。
在生物学中,非线性分析方法可以用来研究生物体的生长过程和种群演化。
在工程学中,非线性分析方法可以用来优化系统的控制和设计。
总之,非线性分析是一种重要的数学方法,用于研究非线性系统的行为和性质。
它通过映射和轨道的分析揭示了系统的动力学行为和特征。
非线性分析具有许多重要的方法和工具,如相空间重构和Lyapunov指数。
在科学研究和实际应用中,非线性分析具有广泛的应用价值,可以帮助我们理解和解释复杂的现象和问题。
GTSAM原理介绍GTSAM(Generalized Trajectory and Sparse Factor Graphs Optimization)是一个用于非线性优化的开源库,专注于传感器数据处理和SLAM(Simultaneous Localization and Mapping)问题。
它是一个基于因子图的优化框架,可以在不同传感器数据的基础上进行状态估计和地图构建。
为什么选择GTSAMGTSAM的设计目标是提供一个高效、灵活和易于使用的非线性优化框架。
相比于其他优化库,GTSAM具有以下优势: 1. 因子图表示:GTSAM使用因子图来表示问题,将状态变量和约束关系以图的形式表示出来,使得问题更加直观和可理解。
2.稀疏性:GTSAM利用问题的稀疏性,只存储和处理非零元素,大大减少了计算和存储的复杂度。
3. 高效性:GTSAM使用了一些高效的优化算法和数据结构,如QR分解、Cholesky分解等,以提高计算效率。
4. 可扩展性:GTSAM支持自定义因子和变量类型,可以根据具体问题进行扩展和定制。
GTSAM的基本原理GTSAM的基本原理是基于因子图的优化。
因子图是一种用于表示概率模型的图结构,其中节点表示变量,边表示变量之间的关系。
在GTSAM中,因子图由变量节点和因子节点组成,变量节点表示状态变量,因子节点表示约束关系。
变量节点在GTSAM中,变量节点表示状态变量,可以是连续变量、离散变量或者混合变量。
每个变量节点都有一个唯一的ID和一个值。
变量节点的值可以是一个向量、一个矩阵或者其他自定义的数据类型。
因子节点在GTSAM中,因子节点表示约束关系,用于描述传感器测量或其他先验知识。
每个因子节点都有一个唯一的ID和一个因子函数。
因子函数是一个函数,接受一组变量作为输入,并返回一个代价值。
因子函数可以是线性函数、非线性函数或其他自定义的函数。
优化问题在GTSAM中,优化问题可以表示为最小化一个代价函数的问题,代价函数是所有因子函数的加权和。