六轴机器人坐标系
- 格式:doc
- 大小:194.00 KB
- 文档页数:2
6轴机器人基本知识
六轴机器人是一种具有六个自由度的机器人系统,它可以在三维空间内进行灵活的运动和操作。
下面是关于六轴机器人基本知识的介绍:
1. 自由度:六轴机器人具有六个自由度,分别是三个旋转自由度和三个平移自由度。
这意味着它可以在x、y、z三个方向上进行旋转和平移运动。
2. 关节:六轴机器人的运动是通过控制其六个关节的旋转来实现的。
每个关节都由电机驱动,可以通过控制电机的转动角度来控制机器人的运动。
3. 动力学:六轴机器人的动力学研究是研究机器人在外界力和力矩作用下的运动和力学特性。
通过对机器人的动力学建模,可以预测机器人的运动轨迹和受力情况。
4. 传感器:六轴机器人通常配备了各种传感器,如位置传感器、力传感器和视觉传感器等,用于感知外界环境和处理机器人操作时的信息。
5. 控制系统:六轴机器人的运动是通过控制电机和驱动器来实现的。
控制系统通常由一个计算机和相应的控制算法组成,可以根据输入的指令和感知的信息控制机器人的运动和操作。
6. 应用领域:六轴机器人广泛应用于制造业、物流业、医疗领域和科研实验等各个领域。
它们可以执行各种任务,如装配、
搬运、焊接、喷涂等,为人们提供便利和效率。
以上是关于六轴机器人基本知识的介绍,希望对您有所帮助。
V A L I R O B O T六轴机器人使用手册客户:版本:1.0版日期:2013-1-1瓦力智能科技V a l i I n t e l l i g e n t T e c h n o l o g yC o r p o r a t i o n操作前,请注意安全。
确认人员与周边设备都在工作范围外。
内容若有错误,请以原厂操作说明书为准!目录第一章安全 (1)1.1 保障安全 (1)1.2 专门培训 (3)1.3 操作人员安全注意事项 (3)1.4 机器人的安全注意事项 (5)1.5 移动及转让机器人的注意事项 (7)1.6 废弃机器人的注意事项 (7)第二章机器人菜单详解 (8)2.1 六轴机器人系统介绍 (8)2.2 系统运行环境 (9)2.3 程序菜单介绍 (9)2.4 数据菜单介绍 (11)2.5 机器人菜单介绍 (12)2.6 显示菜单介绍 (14)第三章手动操作机器人 (17)第四章机器人编程教导 (26)4.1 建立新程序 (26)4.2 常用编程指令介绍 (30)第五章机器人的保养 (42)5.1 机械手的保养 (42)5.2 控制柜的保养 (43)第一章安全安全在生产中是最重要的,无论是自身的安全,还是他人及设备的安全都很重要,所以在这里我们把安全放在首位首先我们来介绍一下在生产操作中应注意哪些安全问题,应该怎么解决。
1.1 保障安全机器人与其他机械设备的要求通常不同, 如它的大运动范围、快速的操作、手臂的快速运动等,这些都会造成安全隐患。
阅读和理解使用说明书及相关的文件,并遵循各种规程,以免造成人身伤害或设备事故。
用户有责任保证其安全的操作环境符合和遵守地方及国家有关安全性的法令、法规及条例。
上图为安全注意事项:危险,误操作时有危险可能发生死亡或重伤害事故。
注意,可能发生中等伤害或轻伤事故。
强制,必须遵守的事项。
禁止,禁止的事项。
1.2 专门培训• 示教和维护机器人的人员必须事先经过培训。
工业机器人的运动控制【知识目标】1.掌握机器人运动轴和坐标系。
2.掌握手动操纵机器人的流程和方法。
【技能目标】能够使用示教器熟练操作工业机器人实现单轴运动、线性运动。
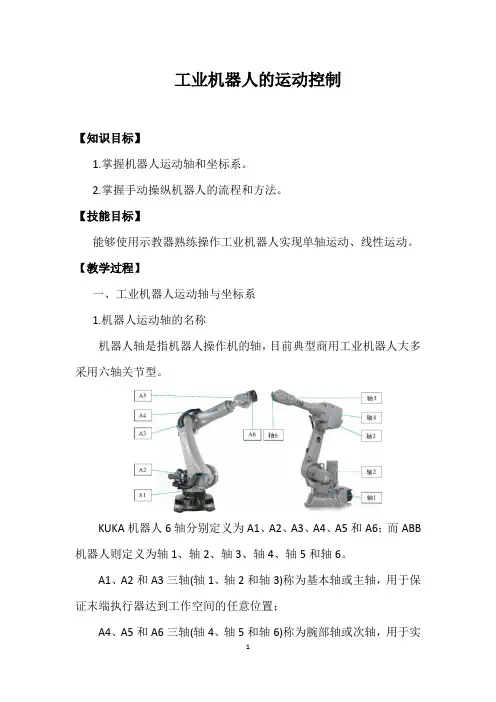
【教学过程】一、工业机器人运动轴与坐标系1.机器人运动轴的名称机器人轴是指机器人操作机的轴,目前典型商用工业机器人大多采用六轴关节型。
KUKA机器人6轴分别定义为A1、A2、A3、A4、A5和A6;而ABB 机器人则定义为轴1、轴2、轴3、轴4、轴5和轴6。
A1、A2和A3三轴(轴1、轴2和轴3)称为基本轴或主轴,用于保证末端执行器达到工作空间的任意位置;A4、A5和A6三轴(轴4、轴5和轴6)称为腕部轴或次轴,用于实现末端执行器的任意空间姿态。
2.机器人坐标系的种类在大部分工业机器人系统中,均可使用关节坐标系、大地(基)坐标系、工具坐标系和用户坐标系,而工具坐标系和用户坐标系同属于直角坐标系范畴。
A.关节坐标系在关节坐标系下,机器人各轴均可实现单独正向或反向运动。
对于大范围运动,且不要求TCP姿态的,可选择关节坐标系。
B.直角坐标系直角坐标系(世界坐标系、大地坐标系)是机器人示教与编程时经常使用的坐标系之一,所有其他的坐标系均与大地坐标系直接或间接相关。
基坐标系的原点定义在机器人安装面与第一转轴的交点处,X 轴向前,Z 轴向上,Y 轴按右手法则确定。
无论机器人处于什么位置,TCP均可沿基坐标系的X、Y和Z轴平行移动。
法兰坐标系是原点为机器人法兰中心的坐标系,是工具坐标系的参考点。
C.工具坐标系工具坐标系是一个可自由定义,用户定制的坐标系。
工具坐标系的原点定义在TCP点,并且假定工具的有效方向为Z轴(有些机器人厂商将工具的有效方向定义为X轴),而Y轴、Z轴由右手法则确定,如图1-2-24所示。
工具坐标的方向随腕部的移动而发生变化,与机器人的位姿无关。
因此,在进行相对于工件不改变工具姿态的平移操作时,选用该坐标系最为适宜。
D.用户坐标系用户坐标系为作业示教方便,由用户自行定义的坐标系,它定义工件相对于大地坐标系的位置,如工作台坐标系和工件坐标系,如图所示。
六轴联动机械臂运动学求解分析第一讲作者朱森光Email zsgsoft@1引言笔者研究六轴联动机械臂源于当前的机器人产业热,平时比较关注当前热门产业的发展方向。
笔者工作主要从事软件开发跟机器人毫无关系,利用业余时间研究整理机器人技术相关的文章,希望能够起到抛砖引玉的作用引发更多的人发表有关机器人技术的原创性技术资料。
本系列文章的所有文字、图片及相关资料均为原创,内容正确性经过笔者亲自编程仿真验证可以信赖。
2机器建模2.1坐标系既然要研究机器人,那么首先要建立一个机械模型,本文将以典型的六轴联动机器臂为例进行介绍,图2-1为笔者使用3D技术建立的一个简单模型。
首先建立一个大地坐标系,一般教科书上都是以大地为XY平面,垂直于大地向上方向为Z轴,本文为了跟教科书上有所区别同时不失一般性,将以水平向右方向为X轴,垂直于大地向上方向为Y轴,背离机器人面向人眼的方向为Z轴,移到电脑屏幕上那就是屏幕水平向右为X轴,屏幕水平向上为Y轴,垂直于屏幕向外为Z轴,之所以建立这样不合常规的坐标系是希望能够突破常规的思维定势训练在任意空间建立任意坐标系的能力。
图2-1图2-1中的机械臂,灰色立方体为机械臂底座,定义为关节1,它能绕图中Y轴旋转;青色为关节2,它能绕图中的Z1轴旋转;蓝色为关节3,它能绕图中的Z2轴旋转;绿色为关节4,它能绕图中的X3轴旋转;红色为关节5,它能绕图中的Z4轴旋转;黄色为关节6,它能绕图中的X5轴旋转。
2.2齐次变换矩阵齐次变换矩阵是机器人技术里最重要的数学分析工具之一,关于齐次变换矩阵的原理很多教科书中已经描述在此不再详述,这里仅针对图2-1的机械臂写出齐次变换矩阵的生成过程。
首先定义一些变量符号,关节1绕图中Y轴旋转的角度定义为θ0,当θ0=0时,O1点在OXYZ坐标系内的坐标是(x0,y0,0);关节2绕图中的Z1轴旋转的角度定义为θ1,图中的θ1当前位置值为+90度;定义O1O2两点距离为x1,关节3绕图中的Z2轴旋转的角度定义为θ2,图中的θ2当前位置值为-90度;O2O3两点距离为x2,关节4绕图中的X3轴旋转的角度定义为θ3, 图中的θ3当前位置值为-60度;O3O4两点距离为x3,关节5绕图中的Z4轴旋转的角度定义为θ4, 图中的θ4当前位置值为-60度;O4O5两点距离为x4,关节6绕图中的X5轴旋转的角度定义为θ5, 图中的θ5当前位置值为+60度。
六自由度机器人的运动学分析王梦涛;张良安【摘要】For a developed 6 degree-of-freedom robot with 2,3 and 4-axis parallelled to each other, a forward kine-matics equation of the robot was acquired by establishing the link coordinate system and transformation matrix with D-H(Denavit-Hartenberg) method. Based on the idea of matrix inversion, the inverse kinematics calculation method of 6 degree-of-freedom robot was proposed, and all analytical solutions of the inverse kinematics were obtained. According to the singularity of the robot, the processing method of the inverse solution of the singular position was proposed, the forward kinematics model and inverse kinematics solution were verified by Robotics Toolbox in MATLAB software. The research results provide a basis for later trajectory planning and control of the robot, and it is a reference for the kinematics of the robot with similar structure.%针对一种自主研发的二三四轴相互平行的六自由度机器人,通过D-H(Denavit-Hartenberg)法建立机器人连杆坐标系和变换矩阵,求得正运动学方程,基于矩阵逆乘的思路进行逆运动学的求解,提出此类六自由度机器人逆运动学求解的方法,求出逆运动学的全部解析解.针对该机器人的奇异性,提出奇异位置逆解的处理方法,并用MATLAB机器人工具箱Robotics Tool-box验证了正解模型和逆解算法的正确性.研究结果为该机器人后续的轨迹规划和控制提供理论依据,对于具有相似结构的机器人运动学正逆解问题具有借鉴意义.【期刊名称】《安徽工业大学学报(自然科学版)》【年(卷),期】2016(033)004【总页数】7页(P365-371)【关键词】六自由度机器人;运动学;机器人工具箱;奇异性【作者】王梦涛;张良安【作者单位】安徽工业大学机械工程学院,安徽马鞍山243032;安徽工业大学机械工程学院,安徽马鞍山243032【正文语种】中文【中图分类】TP242.2在2015上海、苏州的工业机器人展览会上,众多机器人厂商纷纷推出其3~10kg轻载机器人产品,如日本那智不二越的MZ系列六自由度机器人、德国KUKA的LBR iiwa机器人、瑞士ABB的YuMi机器人等。
.简述工业机器人的机械臂中六轴的定义及作用
工业机器人的机械臂通常由六个旋转关节构成,这六个关节分别按照约定的坐标系进行命名,分别为基座、肩关节、肘关节、手腕翻转关节、手腕挤压关节和手腕旋转关节。
基座位于机器人臂的底座,是整个机械臂的起始点。
肩关节与基座相连,并负责让机械臂可以在水平面内进行旋转,类似于人类的肩膀。
肘关节位于肩关节的下方,让机械臂能够在垂直平面内进行旋转,类似于人类的肘部。
手腕翻转关节位于肘关节的下方,它的作用是让机械臂能够进行前后翻转的动作,类似于人类的手腕。
手腕挤压关节位于手腕翻转关节的下方,允许机械臂进行手腕的压紧和松开动作,类似于人类手掌的握紧和松开。
手腕旋转关节位于手腕挤压关节的下方,它负责让机械臂能够进行手腕的旋转动作。
这六个关节的组合,使得工业机器人的机械臂能够在三维空间内灵活移动和完成各种任务。
通过细微调整各个关节的速度和角度,机械臂可以精确地抓取、放置和操作物体,实现生产线上的自动化操作。
六轴机械臂还具有较高的自由度和灵活性,可以适应多样的工作环境和工件形状,提高生产效率和质量。
========六轴机器人直角坐标系======== P(x,y,z,a,b,c,d)
x: X轴距离(P点X轴分量);
y: Y轴距离(P点Y轴分量);
z: Z轴距离(P点Z轴分量);
a: 姿态平面角;
a角度为姿态向量PQ在XOY平面映射的向量与OX轴的夹角;
角度范围:[-180, 180);
b: 姿态线面角;
b角度为姿态向量PQ与OZ轴的夹角;
角度范围:[ 0, 180);
c: 姿态旋转角;
c角度为工具向量在XOY平面映射的向量与OX轴的夹角;
角度范围:[-360, 360);
d: 模型中各关节角度状态;
d为整数,无值是默认为0;
规定:
0:末端映射为正方向,与DH参数的D1同向,第三轴角度(-)号,第五轴角度(-)号; 1:末端映射为正方向,与DH参数的D1同向,第三轴角度(-)号,第五轴角度(+)号; 2:末端映射为正方向,与DH参数的D1同向,第三轴角度(+)号,第五轴角度(-)号; 3:末端映射为正方向,与DH参数的D1同向,第三轴角度(+)号,第五轴角度(+)号; 4:末端映射为负方向,与DH参数的D1逆向,第三轴角度(-)号,第五轴角度(-)号; 5:末端映射为负方向,与DH参数的D1逆向,第三轴角度(-)号,第五轴角度(+)号; 6:末端映射为负方向,与DH参数的D1逆向,第三轴角度(+)号,第五轴角度(-)号; 7:末端映射为负方向,与DH参数的D1逆向,第三轴角度(+)号,第五轴角度(+)号;。
六轴机器人夹爪tpc点标定方法六轴机器人夹爪的TPC点标定方法是一种用于确保夹爪在机器人操作中的准确性和精度的技术。
以下是该方法的步骤:
1. 准备工作:确保机器人和夹爪处于良好的工作状态,并准备好所需的工具和设备,如标定工具、测量设备等。
2. 设定标定参数:根据机器人的型号和夹爪的规格,设定相应的标定参数,如TCP(工具中心点)的初始值、标定精度等。
3. 记录初始位置:在开始标定之前,记录下夹爪的初始位置和姿态,以便在标定后进行比较和验证。
4. 执行标定操作:按照机器人制造商提供的标定步骤,执行夹爪的TPC点标定操作。
这通常包括移动夹爪到特定的位置和姿态,并记录下这些位置和姿态下的夹爪坐标。
5. 验证标定结果:在完成标定后,验证标定结果的准确性。
这可以通过比较标定前后的夹爪位置和姿态变化来进行。
如果结果不准确,需要进行调整和重新标定。
6. 更新机器人系统:将标定的结果更新到机器人的控制系统中,以便在后续的操作中使用正确的夹爪坐标。
需要注意的是,具体的标定步骤可能因机器人制造商和机器人型号的不同而有所差异。
因此,在进行六轴机器人夹爪的TPC点标定时,建议参考机器人制造商提供的操作手册或技术指南,以确保正确的操作和准确性。
========六轴机器人直角坐标系======== P(x,y,z,a,b,c,d)
x: X轴距离(P点X轴分量);
y: Y轴距离(P点Y轴分量);
z: Z轴距离(P点Z轴分量);
a: 姿态平面角;
a角度为姿态向量PQ在XOY平面映射的向量与OX轴的夹角;
角度范围:[-180, 180);
b: 姿态线面角;
b角度为姿态向量PQ与OZ轴的夹角;
角度范围:[ 0, 180);
c: 姿态旋转角;
c角度为工具向量在XOY平面映射的向量与OX轴的夹角;
角度范围:[-360, 360);
d: 模型中各关节角度状态;
d为整数,无值是默认为0;
规定:
0:末端映射为正方向,与DH参数的D1同向,第三轴角度(-)号,第五轴角度(-)号; 1:末端映射为正方向,与DH参数的D1同向,第三轴角度(-)号,第五轴角度(+)号; 2:末端映射为正方向,与DH参数的D1同向,第三轴角度(+)号,第五轴角度(-)号; 3:末端映射为正方向,与DH参数的D1同向,第三轴角度(+)号,第五轴角度(+)号; 4:末端映射为负方向,与DH参数的D1逆向,第三轴角度(-)号,第五轴角度(-)号; 5:末端映射为负方向,与DH参数的D1逆向,第三轴角度(-)号,第五轴角度(+)号; 6:末端映射为负方向,与DH参数的D1逆向,第三轴角度(+)号,第五轴角度(-)号; 7:末端映射为负方向,与DH参数的D1逆向,第三轴角度(+)号,第五轴角度(+)号;。