机器人的位姿运动学2017
- 格式:ppt
- 大小:2.13 MB
- 文档页数:42
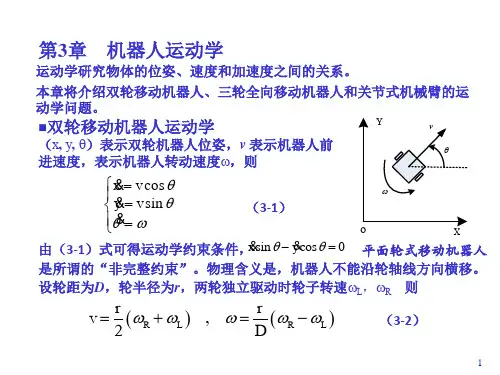
机器人运动学(培训教材)(总49页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--第2章机器人位置运动学引言本章将研究机器人正逆运动学。
当已知所有的关节变量时,可用正运动学来确定机器人末端手的位姿。
如果要使机器人末端手放在特定的点上并且具有特定的姿态,可用逆运动学来计算出每一关节变量的值。
首先利用矩阵建立物体、位置、姿态以及运动的表示方法,然后研究直角坐标型、圆柱坐标型以及球坐标型等不同构型机器人的正逆运动学,最后利用Denavit-Hartenberg(D-H)表示法来推导机器人所有可能构型的正逆运动学方程。
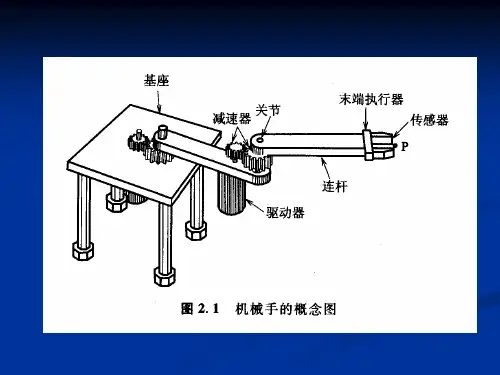
实际上,机器手型的机器人没有末端执行器,多数情况下,机器人上附有一个抓持器。
根据实际应用,用户可为机器人附加不同的末端执行器。
显然,末端执行器的大小和长度决定了机器人的末端位置,即如果末端执行器的长短不同,那么机器人的末端位置也不同。
在这一章中,假设机器人的末端是一个平板面,如有必要可在其上附加末端执行器,以后便称该平板面为机器人的“手”或“端面”。
如有必要,还可以将末端执行器的长度加到机器人的末端来确定末端执行器的位姿。
机器人机构机器手型的机器人具有多个自由度(DOF),并有三维开环链式机构。
在具有单自由度的系统中,当变量设定为特定值时,机器人机构就完全确定了,所有其他变量也就随之而定。
如图所示的四杆机构,当曲柄转角设定为120°时,则连杆与摇杆的角度也就确定了。
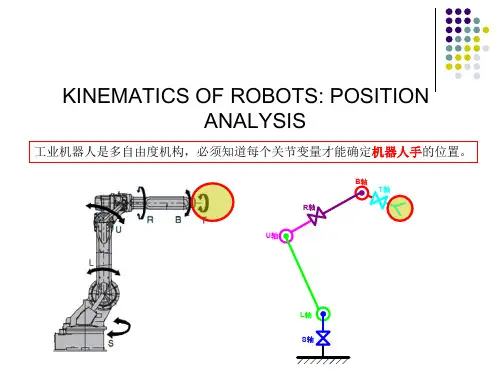
然而在一个多自由度机构中,必须独立设定所有的输入变量才能知道其余的参数。
机器人就是这样的多自由度机构,必须知道每一关节变量才能知道机器人的手处在什么位置。
图 具有单自由度闭环的四杆机构如果机器人要在空间运动,那么机器人就需要具有三维的结构。
虽然也可能有二维多自由度的机器人,但它们并不常见。
机器人是开环机构,它与闭环机构不同(例如四杆机构),即使设定所有的关节变量,也不能确保机器人的手准确地处于给定的位置。