末端执行器的位置与姿态简称机器人位置与姿态
3.5机器人位置与姿态描述
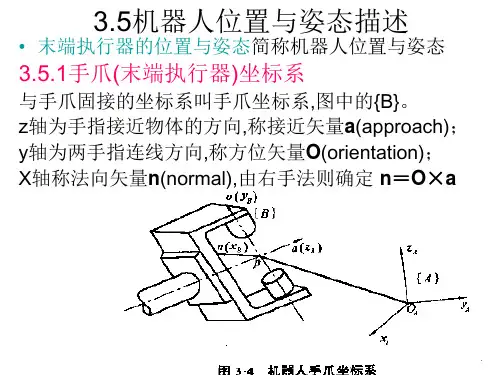
3.5.1手爪(末端执行器)坐标系
与手爪固接的坐标系叫手爪坐标系,图中的{B}. z轴为手指接近物体的方向,称接近矢量a(approach); y轴为两手指连线方向,称方位矢量O(orientation); X轴称法向矢量n(normal),由右手法则确定 n=O×a = ×
4.2机器人连杆坐标系变换矩阵
4.2.1相邻坐标系变换矩阵
1)符号 表示相邻两连杆坐标系间的齐次变换矩阵 上标(i-1)表示变换的目的(变换后)坐标系 下标( i )表示变换前的坐标系 机器人运动学正问题求解,变换总是向序号减少的 方向进行,所以 Aii 1 的上标可省略,简写为 Ai 只有相邻两坐标系间的齐次变换,且变换向序号减 少的方向进行,上标才可省略
连杆D-H参数见表3-10
连杆的D-H坐标变换矩阵为:
A64 = A5 A6
3 A6 = A4 A5 A6
3 A62 = A3 A6
1 A6 = A2 A62
运动学方程为:
0 A6 = A1 A2 A3 A4 A5 A6
若令θl=90°, θ2=0°, θ3=90°, θ4=0°, θ5=0°, θ6=0°, 并将有关常量代人矩阵 T ,则有
2)数学表达式
在数学上,机器人终端手 爪的广义位置(位姿)矢量P 可写成:
4.5.2雅可比矩阵的物理意义 4.5.2雅可比矩阵的物理意义
对于有n个关节的机器人,其雅可比矩阵.J(q)是 对于有n个关节的机器人,其雅可比矩阵.J(q)是6×n阶矩阵, 阶矩阵, 其前三行称为线速度(位置)雅可比矩阵, 其前三行称为线速度(位置)雅可比矩阵,代表对手爪线速度 的传递比,后三行称为角速度(方位)矩阵, 的传递比,后三行称为角速度(方位)矩阵,代表相应的关节 速度,对手爪的角速度的传递比.因此, 速度,对手爪的角速度的传递比.因此,可将雅可比矩阵 J(q)分块 分块, J(q)分块,即: J= J L = J L1 J L2 J L3 J L4 J L5 J L6 JL 称为与平移速度相关的雅可比矩阵. . JA 称为与角速度相关的雅可比矩阵