自适应滤波器MATLAB仿真
- 格式:doc
- 大小:926.00 KB
- 文档页数:7
matlab 自适应卡尔曼滤波自适应卡尔曼滤波是一种基于卡尔曼滤波算法的扩展,用于跟踪非线性系统的状态。
在传统的卡尔曼滤波中,假设系统是线性的,并且系统的噪声和测量噪声是已知的。
然而,在实际应用中,往往会遇到非线性系统或未知的噪声情况,这就需要使用自适应卡尔曼滤波方法来处理。
自适应卡尔曼滤波的基本思想是通过一种递归算法,根据系统的状态和测量值的变化来调整卡尔曼滤波的参数。
具体步骤如下:1. 初始化卡尔曼滤波模型的参数,包括状态向量、状态转移矩阵、测量矩阵、过程噪声协方差矩阵、测量噪声协方差矩阵等。
2. 根据当前的测量值和状态向量,计算预测的状态向量和状态转移矩阵。
3. 通过当前的测量值和预测的状态向量,计算卡尔曼增益。
4. 更新状态向量和状态协方差矩阵。
5. 根据更新后的状态向量,重新计算过程噪声协方差矩阵和测量噪声协方差矩阵。
6. 重复步骤2到5,直到滤波结束。
自适应卡尔曼滤波的关键在于如何根据当前的测量值和状态向量来调整滤波模型的参数,以适应实际系统的变化。
常见的自适应卡尔曼滤波算法包括扩展卡尔曼滤波(EKF)、无迹卡尔曼滤波(UKF)和粒子滤波等。
在MATLAB中,可以使用现有的工具箱或编写自己的函数来实现自适应卡尔曼滤波。
MATLAB提供了kalmanfilt函数用于实现标准的卡尔曼滤波,同时也可以根据需要自定义滤波模型和参数。
它还提供了ekf, ukf和pf函数分别用于实现扩展卡尔曼滤波、无迹卡尔曼滤波和粒子滤波算法。
下面是一个简单的MATLAB示例,演示了如何使用kalmanfilt函数实现自适应卡尔曼滤波:matlab% 定义系统的状态转移矩阵和测量矩阵A = [1 0.1; 0 1];C = [1 0];% 定义过程噪声协方差矩阵和测量噪声协方差矩阵Q = [0.01 0; 0 0.01];R = 0.1;% 创建kalman滤波器对象kf = kalmanfilt(A, C, Q, R);% 初始化状态向量和状态协方差矩阵x0 = [0; 0];P0 = eye(2);% 生成模拟数据N = 100;x_true = zeros(2, N);y = zeros(1, N);for k = 1:Nx_true(:, k) = A * x_true(:, k-1) + sqrtm(Q) * randn(2, 1);y(k) = C * x_true(:, k) + sqrt(R) * randn(1);end% 使用kalman滤波器滤波数据x_est = zeros(2, N);for k = 1:Nx_est(:, k) = kf(y(k));end% 绘制真实值和估计值的对比图figure;hold on;plot(1:N, x_true(1, :), 'b-', 'LineWidth', 2);plot(1:N, x_true(2, :), 'r-', 'LineWidth', 2);plot(1:N, x_est(1, :), 'k', 'LineWidth', 2);plot(1:N, x_est(2, :), 'm', 'LineWidth', 2);legend('True x1', 'True x2', 'Estimate x1', 'Estimate x2');hold off;以上示例中,定义了一个二维状态向量和一个一维测量向量,并根据这两个向量构建了卡尔曼滤波模型的参数。
LMS算法MatLab实现LMS算法MatLab实现LMS⾃适应滤波器是使滤波器的输出信号与期望响应之间的误差的均⽅值为最⼩,因此称为最⼩均⽅(LMS)⾃适应滤波器。
其原理及推导见function [yn,W,en]=LMS(xn,dn,M,mu,itr)% LMS(Least Mean Squre)算法% 输⼊参数:% xn 输⼊的信号序列 (列向量)% dn 所期望的响应序列 (列向量)% M 滤波器的阶数 (标量)% mu 收敛因⼦(步长) (标量) 要求⼤于0,⼩于xn的相关矩阵最⼤特征值的倒数% itr 迭代次数 (标量) 默认为xn的长度,M<itr<length(xn)% 输出参数:% W 滤波器的权值矩阵 (矩阵)% ⼤⼩为M x itr,% en 误差序列(itr x 1) (列向量)% yn 实际输出序列 (列向量)% 参数个数必须为4个或5个if nargin == 4 % 4个时递归迭代的次数为xn的长度itr = length(xn);elseif nargin == 5 % 5个时满⾜M<itr<length(xn)if itr>length(xn) | itr<Merror('迭代次数过⼤或过⼩!');endelseerror('请检查输⼊参数的个数!');end% 初始化参数en = zeros(itr,1); % 误差序列,en(k)表⽰第k次迭代时预期输出与实际输⼊的误差W = zeros(M,itr); % 每⼀⾏代表⼀个加权参量,每⼀列代表-次迭代,初始为0% 迭代计算for k = M:itr % 第k次迭代x = xn(k:-1:k-M+1); % 滤波器M个抽头的输⼊y = W(:,k-1).' * x; % 滤波器的输出en(k) = dn(k) - y ; % 第k次迭代的误差% 滤波器权值计算的迭代式W(:,k) = W(:,k-1) + 2*mu*en(k)*x;end% 求最优时滤波器的输出序列yn = inf * ones(size(xn));for k = M:length(xn)x = xn(k:-1:k-M+1);yn(k) = W(:,end).'* x;endLMS函数的⼀个实例:%function main()close all% 周期信号的产⽣t=0:99;xs=10*sin(0.5*t);figure;subplot(2,1,1);plot(t,xs);grid;ylabel('幅值');title('it{输⼊周期性信号}');% 噪声信号的产⽣randn('state',sum(100*clock));xn=randn(1,100);subplot(2,1,2);plot(t,xn);grid;ylabel('幅值');xlabel('时间');title('it{随机噪声信号}');% 信号滤波xn = xs+xn;xn = xn.' ; % 输⼊信号序列dn = xs.' ; % 预期结果序列M = 20 ; % 滤波器的阶数rho_max = max(eig(xn*xn.')); % 输⼊信号相关矩阵的最⼤特征值mu = rand()*(1/rho_max) ; % 收敛因⼦ 0 < mu < 1/rho[yn,W,en] = LMS(xn,dn,M,mu);% 绘制滤波器输⼊信号figure;subplot(2,1,1);plot(t,xn);grid;ylabel('幅值');xlabel('时间');title('it{滤波器输⼊信号}');% 绘制⾃适应滤波器输出信号subplot(2,1,2);plot(t,yn);grid;ylabel('幅值');xlabel('时间');title('it{⾃适应滤波器输出信号}');% 绘制⾃适应滤波器输出信号,预期输出信号和两者的误差figureplot(t,yn,'b',t,dn,'g',t,dn-yn,'r');grid;legend('⾃适应滤波器输出','预期输出','误差');ylabel('幅值');xlabel('时间');title('it{⾃适应滤波器}');运⾏后的结果如下:。
自适应滤波器MATLAB仿真摘要:本文介绍了自适应滤波器的工作原理,以及推导了著名的LMS(Least mean squares)算法。
以一个例子演示了自适应滤波器的滤波效果。
实验结果表明,该滤波器滤波效果较好。
关键词:自适应滤波器 MATLAB7.0 LMS算法Simulate of adaptive filter based on MATLAB7.0Abstract:This article described the working principle of adaptive filter and deduced the well-known LMS algorithm. Take an example to demonstrate the adaptive filters filtering effects. The results show that the filter has an effective way to filter single.Key words:LMS algorithm Adaptive Filter Matlab7.01 引言由Widrow B等提出的自适应滤波理论,是在维纳滤波、卡尔曼滤波等线性滤波基础上发展起来的一种最佳滤波方法。
由于它具有更强的适应性和更优的滤波性能,从而广泛应用于通信、系统辨识、回波消除、自适应谱线增强、自适应信道均衡、语音线性预测和自适应天线阵等诸多领域[1]。
自适应滤波器最大的优点在于不需要知道信号和噪声的统计特性的先验知识就可以实现信号的最佳滤波处理。
本文通过一个具体例子和结果论证了自适应滤波器的滤波效果。
2 自适应滤波原理及LMS算法2.1 自适应滤波原理自适应滤波原理图[2],如图1所示。
图1自适应滤波原理图在自适应滤波器中,参数可调的数字滤波器一般为FIR数字滤波器,IIR数字滤波器或格型数字滤波器。
自适应滤波分2个过程。
第一,输入信号想x(n)通过参数可调的数字滤波器后得输出信号y(n),y(n)与参考信号d(n)进行比较得误差信号e(n);第二,通过一种自适应算法和x(n)和e(n)的值来调节参数可调的数字滤波器的参数,即加权系数,使之达到最佳滤波效果。
自适应卡尔曼滤波matlab自适应卡尔曼滤波(Adaptive Kalman Filtering)是一种常用的估计和滤波技术,常用于处理不确定性和噪声存在的系统。
在这篇文章中,我将详细介绍自适应卡尔曼滤波的原理和应用,并探讨如何在MATLAB中实现该算法。
自适应卡尔曼滤波是卡尔曼滤波器的一种扩展形式,它通过动态调整滤波器的参数,以适应不断变化的系统条件和噪声水平。
与传统的卡尔曼滤波相比,自适应卡尔曼滤波具有更好的鲁棒性和适应性。
自适应卡尔曼滤波的关键思想是根据观测数据的特点动态调整系统模型的参数。
在传统的卡尔曼滤波中,系统模型的参数通常是固定的,但在实际应用中,系统的动态特性和外部环境的变化可能导致模型参数的不确定性。
自适应卡尔曼滤波通过监测观测数据的统计特性,自动调整系统模型的参数,以提高滤波器的性能。
在MATLAB中实现自适应卡尔曼滤波可以分为以下几个步骤:1. 定义系统模型:首先需要定义系统的状态变量、测量变量以及系统的状态转移方程和测量方程。
这些方程描述了系统的动态特性和观测模型。
2. 初始化滤波器:在开始滤波之前,需要初始化滤波器的状态向量和协方差矩阵。
状态向量表示系统的状态变量,协方差矩阵表示对状态变量估计的不确定性。
3. 预测步骤:根据系统的状态转移方程和当前的状态估计,进行状态的预测。
预测的结果是对系统下一时刻状态的估计。
4. 更新步骤:根据测量方程和当前的观测值,更新状态估计和协方差矩阵。
更新的结果是对系统当前状态的更准确估计。
5. 自适应调整:根据观测数据的统计特性,自适应地调整滤波器的参数。
这个步骤是自适应卡尔曼滤波与传统卡尔曼滤波的主要区别之一。
自适应卡尔曼滤波在许多领域都有广泛的应用。
例如,在目标跟踪中,通过自适应调整滤波器的参数,可以更好地适应目标运动的变化和观测噪声的不确定性。
在信号处理中,自适应卡尔曼滤波可以用于去除信号中的噪声和干扰,提高信号的质量。
自适应卡尔曼滤波是一种强大的估计和滤波技术,能够有效处理不确定性和噪声存在的系统。
基于Matlab的自适应滤波器的设计及仿真赵夏爽物理与电子信息学院电子信息科学与技术专业学号:130522036指导教师:燕慧英摘要:自适应滤波器的研究是当今信号处理中最活跃的研究课题之一。
自适应滤波器因其具有很强的自学习、自跟踪能力和算法的简单易实现性等优越性能,已经在数字通信、工业控制和雷达等领域获得了广泛应用。
首先介绍了自适应滤波器的基本理论思想,具体阐述了自适应滤波器的基本原理、算法及设计方法。
接着对自适应滤波器的核心算法——最小均方误差(LMS)进行介绍和分析,最后基于LMS算法设计自适应滤波器并进行MatLab仿真,仿真结果表明设计的自适应滤波器具有良好的性能和较强的可操作性。
关键词:自适应滤波器;LMS算法;matlab仿真Design and Implemeutation of the Auto-adapted FilterZhao xia-shuangCollege of Physics and Electronic Information Electronic Information Science and TechnologyNo:130522036Tutor:YanHui-yingAbstract:The research of adaptive filter is one of the most active research topic in signal processing.Adaptive filter because of its strong self-learning,self tracking ability and simple algorithm of superior performance and easy to implement,has been widely used in digital communication,industrial control and other fields of radar.Firstly introduces the basic theory of adaptive filter,expounds the basic principle,algorithm and adaptive filter design method.The core algorithm of the adaptive filter--minimum mean square error(LMS)were introduced and analyzed,based on the design of adaptive LMS filter algorithm and MatLab simulation,the simulation results show that the design of adaptive filter has good performance and strong operability.Keywords:adaptive filter;LMS algorithm;MATLAB simulation目录1引言 (3)1.1国内外研究现状与前景 (3)1.2课题研究的意义和目的 (4)2自适应滤波器理论基础 (4)2.1滤波器的基本概念 (4)2.2自适应滤波器的结构 (5)2.3自适应滤波器原理 (5)2.4自适应滤波器的LMS算法 (6)3自适应滤波器设计及仿真 (7)3.1LMS算法参数分析 (7)3.2自适应滤波器的仿真 (7)3.2.1Matlab软件介绍 (7)3.2.2基于LMS算法实现的流程图 (8)3.2.3自适应滤波器的仿真结果及分析 (9)4总结 (12)参考文献 (12)1引言滤波技术是信号处理的一项重要技术,利用这种技术可以抑制信号中的干扰,获取需要的信息。

MATLAB的⾃适应滤波器设计基于MATLAB的⾃适应滤波器设计第⼀章绪论1.1 引⾔滤波器根据其逼近函数的形式不同, 可设计出多种滤波器. 常⽤的有巴特沃思滤波器、切⽐雪夫é 型滤波器、切⽐雪夫ê 型滤波器、椭圆滤波器、巴塞尔滤波器。
对于这些滤波器的设计, 都是先给定其副频特性的模平⽅?H ( j X) ? 2, 再求出系统函数H (s)。
设计滤波器时, 需由经典式求出滤波器的系统函数H (s) , 求出极点S k (k= 1, 2, ??2N ) , 给定N , X c,E, 即可求得2N 个极点分布。
然后利⽤归⼀化函数, 得出归⼀化的电路组件值, 即可得到满⾜要求的滤波器。
此种设计中, 需要进⾏烦琐、冗长的数字计算, 这对于电路设计者来说, 不仅费时费⼒, 准确性不易把握, ⽽且不符合当今⾼速发展的时代要求。
⾃适应滤波器是近30 年来发展起来的关于信号处理⽅法和技术的滤波器,其设计⽅法对滤波器的性能影响很⼤。
⾃适应滤波器能够得到⽐较好的滤波性能,当输⼊信号的统计特性未知,或者输⼊信号的统计特性变化时,⾃适应滤波器能够⾃动地迭代调节⾃⾝的滤波器参数,以满⾜某种准则的要求,从⽽实现最优滤波。
⾃适应滤波器⼀般包括滤波器结构和⾃适应算法两个部分,这两部分不同的变化与结合,可以导出许多种不同形式的⾃适应滤波器。
1.2 MATLAB简介Matlab是由美国MathWorks公司推出的软件产品。
它是⼀完整的并可扩展的计算机环境, 是⼀种进⾏科学和⼯程计算的交互式程序语⾔。
它的基本数据单元是不需要指定维数的矩阵, 它可直接⽤于表达数学的算式和技术概念, ⽽普通的⾼级语⾔只能对⼀个个具体的数据单元进⾏操作。
在Matlab内部还配备了涉及到⾃动控制、信号处理、计算机仿真等种类繁多的⼯具箱, 所以Matlab 的应⽤⾮常⼴泛, 它可涉⾜于数值分析、控制、信号分析、通信等多种领域。
1.3 ⾃适应滤波器的应⽤适应滤波器在信号检测、信号恢复、数字通信等许躲领域中被⼴泛应⽤,因⽽⼀直是学术界⼀个重要研究课题。
自适应滤波器原理及matlab仿真应用相关代码文章标题:深度解析自适应滤波器原理及matlab仿真应用1. 引言自适应滤波器是数字信号处理中的重要概念,它可以根据输入信号的特性动态地调整滤波器的参数,从而更好地适应信号的变化。
本文将深入探讨自适应滤波器的原理以及在matlab中的仿真应用,帮助读者深入理解这一重要的概念。
2. 自适应滤波器原理自适应滤波器的原理基于最小均方误差准则,它通过不断调整权值参数,使得滤波器输出与期望输出的误差达到最小。
这一原理可以应用在很多领域,如通信系统、雷达系统以及生物医学工程中。
自适应滤波器能够有效地抑制噪声,提高信号的质量。
3. Matlab仿真应用在matlab中,我们可以利用现成的自适应滤波器函数来进行仿真实验。
通过编写相应的matlab代码,我们可以模拟各种不同的信号输入,并观察自适应滤波器的输出效果。
这对于理论学习和工程应用都具有重要意义。
4. 深入理解自适应滤波器我们可以通过探讨自适应滤波器的各种类型、参数选择以及性能评价指标,来深入理解这一概念。
LMS算法、RLS算法以及SVD方法都是自适应滤波器中常见的算法,它们各自适用于不同的场景,并且有着各自的优缺点。
了解这些算法的原理及应用可以帮助我们更好地理解自适应滤波器的工作机制。
5. 个人观点和总结个人观点:自适应滤波器在现代信号处理中具有极其重要的应用价值,通过对其原理的深入理解和matlab中的仿真实验,我们可以更好地掌握这一概念。
在实际工程中,合理地选择自适应滤波器的类型和参数,并结合matlab仿真,可以提高工程设计的效率和准确性。
总结:通过本文对自适应滤波器原理的深入解析和matlab的仿真应用,希望读者能够更好地理解这一重要概念,并且能够在工程实践中灵活应用。
自适应滤波器是数字信号处理中不可或缺的工具,深入掌握其原理和应用对于提高工程设计的水平具有重要意义。
6. 结束语自适应滤波器原理及matlab仿真应用是一个复杂而又精彩的领域,相信通过不断地学习和实践,我们能够更好地理解和应用这一概念。
自适应滤波matlab什么是自适应滤波?自适应滤波是一种信号处理方法,其主要目的是通过根据信号的特性动态调整滤波器参数,从而提高信号处理的效果。
与传统的固定滤波器相比,自适应滤波器可以更好地适应信号的变化,从而实现更高的滤波性能。
自适应滤波器的基本原理是:根据输入信号和期望输出信号之间的差别,调整滤波器的权值,使得输出信号与期望输出信号之间的差别最小化。
通过不断迭代这个过程,自适应滤波器会自动调整权值,从而达到最优的滤波效果。
自适应滤波在许多领域都有广泛的应用,比如语音信号处理、图像处理、雷达信号处理等。
在这些应用中,信号通常会受到噪声、干扰等因素的干扰,而自适应滤波可以有效地减少这些干扰,提取信号中的有用信息。
在Matlab中,有多种方法可以实现自适应滤波。
下面将介绍一种常用的自适应滤波方法——最小均方(LMS)自适应滤波算法的Matlab实现步骤。
首先,在Matlab中,我们可以使用内置的函数“nlms”来实现LMS自适应滤波。
nlms函数的语法如下:matlaby = nlms(x, d, L, mu)其中,x是输入信号,d是期望输出信号,L是滤波器的长度,mu是步长因子。
接下来,我们需要准备输入信号和期望输出信号。
可以使用Matlab中的随机数函数来生成一个输入信号,例如:matlabN = 1000; 输入信号长度x = randn(N, 1);假设我们期望输出信号是输入信号的加权和,可以定义一个权值向量w,然后计算期望输出信号:matlabw = [0.3, 0.5, 0.2]; 权值向量d = filter(w, 1, x);在这里,使用filter函数可以将输入信号与权值向量进行卷积,得到期望输出信号。
接下来,我们可以使用nlms函数来实现自适应滤波。
首先,我们需要初始化滤波器的权值向量w0,可以将其设为全零向量:matlabw0 = zeros(L, 1); 初始权值向量然后,我们可以调用nlms函数进行自适应滤波:matlaby = nlms(x, d, L, mu);其中,L是滤波器的长度,mu是步长因子。
matlab自适应中值滤波
自适应中值滤波是一种信号处理技术,用于去除图像中的噪声。
在图像处理中,噪声是由于各种原因引起的图像中的不希望的变动或干扰。
中值滤波是一种常用的滤波方法,它通过计算像素周围邻域的中值来替代当前像素的值,从而消除图像中的噪声。
自适应中值滤波是中值滤波的一种改进方法,它根据像素邻域中的像素灰度值的统计特征来动态地调整滤波器的尺寸,以适应不同的图像区域和噪声水平。
自适应中值滤波的步骤如下:
1. 首先,选择一个初始的滤波器尺寸,通常为3×3的窗口。
这个窗口将用于计算每个像素的中值。
2. 对于每个像素,确定滤波器尺寸内的邻域像素,并将其按照灰度值的大小进行排序。
3. 计算邻域像素的最小灰度值min和最大灰度值max。
4. 计算邻域像素的中值med。
5. 判断当前像素的灰度值是否在[min, max]之间。
如果是,则将当前像素的灰
度值替换为med;如果不是,则将滤波器尺寸扩大一个像素并重复步骤2-4,直到找到满足条件的中值。
6. 重复步骤2-5,直到对图像中的所有像素进行处理。
通过这种方法,自适应中值滤波能够根据图像中的局部灰度变化来调整滤波器的尺寸,从而更有效地去除噪声。
这种方法对于不同大小的噪声和图像细节具有较好的适应性,能够保持图像的细节信息并减少噪声的影响。
然而,自适应中值滤波可能会导致图像的平滑化和细节丢失,因此在选择滤波器尺寸时需要权衡去噪效果和图像细节的保留。
基于MATLAB的自适应滤波器设计自适应滤波器是一种能够根据输入信号的特性自动调整滤波参数的滤波器。
它的核心思想是根据输入信号与期望输出信号之间的误差来更新滤波器的权值,从而实现对输入信号的准确滤波。
在MATLAB中,可以使用自适应滤波器工具箱来设计和实现自适应滤波器。
自适应滤波器工具箱提供了多种自适应滤波器算法的函数和工具,例如LMS(最小均方误差)算法、RLS(递归最小二乘)算法等。
下面以LMS算法为例,介绍如何基于MATLAB进行自适应滤波器设计。
首先,需要准备好输入信号和期望输出信号。
可以使用MATLAB的信号处理工具箱来生成具有特定频率和幅度的输入信号,或者使用已有的实验数据。
期望输出信号可以根据输入信号进行一定的处理得到,或者使用已有的实验数据。
然后,需要选择自适应滤波器的结构和算法。
在MATLAB中,可以使用`dsp.LMSFilter`类来实现LMS算法。
可以根据输入信号和期望输出信号的特性,选择自适应滤波器的阶数、步长等参数。
接下来,可以使用`dsp.LMSFilter`类的对象来进行自适应滤波器的初始化和更新。
可以通过调用`step`方法来实时更新滤波器的权值,并获取输出信号。
具体步骤如下:1. 创建`dsp.LMSFilter`对象,并指定滤波器的阶数和步长。
```matlablmsFilter = dsp.LMSFilter('Length', filterOrder, 'StepSize', stepSize);```2.初始化滤波器的权值。
```matlablmsFilter.Weights = initialWeights;```3.使用循环结构,依次读取输入信号的每个样本,并根据期望输出信号计算滤波器的权值,同时获取输出信号。
```matlabfor i = 1:length(inputSignal)[outputSignal, lmsFilter] = step(lmsFilter, inputSignal(i), desiredOutput(i));end```4.完成滤波器的更新后,可以获取最终的输出信号。
自适应滤波器原理及matlab仿真应用自适应滤波器原理及MATLAB仿真应用一、引言自适应滤波器是一种能够自动调整参数以适应环境变化的滤波器。
它能够根据输入信号的特性和所需滤波效果,动态地调整滤波器的参数,从而实现对信号的优化处理。
自适应滤波器在许多领域都有广泛的应用,如通信系统、图像处理、声音处理等。
本文将介绍自适应滤波器的工作原理,并通过MATLAB仿真展示其在实际应用中的效果。
二、自适应滤波器原理自适应滤波器的核心思想是根据输入信号的统计特性以及期望输出信号的特性,通过调整滤波器的权值参数,使得滤波器输出信号尽可能接近期望输出信号。
其基本原理可以概括为以下几个步骤:1. 初始化滤波器的权值参数,一般可以设置为0或者随机值。
2. 输入信号通过滤波器后得到输出信号。
3. 根据输出信号与期望输出信号之间的误差,调整滤波器的权值参数。
4. 重复步骤2和步骤3,直到滤波器输出信号达到期望输出信号的要求。
自适应滤波器的关键在于如何调整滤波器的权值参数。
常用的调整算法有最小均方误差(LMS)算法、最小误差平方和(RLS)算法等。
这些算法通过不断迭代,逐渐调整权值参数,使得滤波器的输出信号与期望输出信号之间的误差逐渐减小,从而达到滤波的目的。
三、MATLAB仿真应用MATLAB是一种功能强大的数学计算和仿真软件,广泛应用于各个科学领域。
在自适应滤波器的仿真中,MATLAB提供了许多有用的函数和工具箱,可以方便地进行滤波器参数的计算和调整。
我们需要定义输入信号和期望输出信号。
可以使用MATLAB中的随机函数生成一组随机信号作为输入信号,然后根据需求定义期望输出信号。
在实际应用中,期望输出信号可以是某种理想信号或者已知的参考信号。
接下来,我们可以使用MATLAB中的自适应滤波器函数对输入信号进行滤波处理。
MATLAB提供了adapthfilt函数和nlms函数等用于自适应滤波的函数,可以根据需求选择合适的函数进行滤波处理。
matlab 自适应滤波自适应滤波是一种信号处理技术,它能够根据输入信号的统计特性自动调整滤波器的参数,从而适应不同的环境和噪声条件。
在MATLAB中,我们可以利用信号处理工具箱中的函数实现自适应滤波,例如`nlms`和`rls`函数。
自适应滤波的基本原理是根据输入信号和误差信号的统计特性,通过不断调整滤波器的系数来最小化误差信号的方差。
根据滤波器的更新策略的不同,自适应滤波可以分为最小均方(LMS)算法和递归最小二乘(RLS)算法。
LMS算法是一种迭代算法,每一次迭代都会根据当前输入信号和误差信号来更新滤波器的系数。
MATLAB中的`nlms`函数可以实现LMS算法的自适应滤波。
在使用`nlms`函数时,需要指定输入信号、期望信号(即原始信号),以及滤波器的初始系数。
然后,`nlms`函数会根据输入信号的样本数据和期望信号来计算滤波器的输出信号,并根据差错信号的信息来更新滤波器的系数。
通过多次迭代,滤波器的系数逐渐趋于收敛,从而得到去噪后的信号。
RLS算法是一种基于递归估计的算法,它能够根据过去的输入信号和误差信号的历史数据来计算滤波器的系数。
MATLAB中的`rls`函数可以实现RLS算法的自适应滤波。
在使用`rls`函数时,需要指定输入信号、期望信号(即原始信号),以及滤波器的初始系数。
然后,`rls`函数会根据输入信号和期望信号的历史数据来计算滤波器的系数,并根据当前输入信号和期望信号来计算滤波器的输出信号。
通过递归计算和数据更新,滤波器的系数会不断调整,从而得到去噪后的信号。
自适应滤波在信号处理中具有广泛的应用。
例如,在通信系统中,自适应滤波可以用于抑制信道噪声和多路径干扰,提高信号的质量和可靠性。
在医学影像处理中,自适应滤波可以用于去除图像中的噪声,提高图像的清晰度和对比度。
此外,自适应滤波还可以用于语音信号处理、雷达信号处理、机器视觉等领域。
总结来说,MATLAB中的自适应滤波函数`nlms`和`rls`可以实现信号的去噪和滤波。
matlab 自适应滤波matlab自适应滤波是一种非常有用的信号处理技术,可以在信号中去除噪声,提取出我们所关心的信号特征。
本文将一步一步地回答有关matlab 自适应滤波的问题,并提供一些示例代码来帮助读者更好地理解这一概念。
在开始之前,我们先来了解一下什么是自适应滤波。
自适应滤波是一种根据输入信号的统计特性动态调整滤波器参数的方法。
它依赖于信号的统计信息来估计噪声,然后根据这些估计结果来调整滤波器的参数,以提高信号的质量并去除噪声。
要在matlab中应用自适应滤波,我们可以使用adaptfilt函数。
这个函数提供了几种常见的自适应滤波器实现,包括最小均方差自适应滤波、递归最小二乘自适应滤波、LMS自适应滤波等。
首先,让我们从最简单的自适应滤波器实现开始,即最小均方差自适应滤波。
这种滤波器计算出噪声的自协方差矩阵,并根据该矩阵对输入信号进行滤波。
在matlab中,我们可以使用lms函数来实现最小均方差自适应滤波。
生成噪声信号并添加到输入信号中fs = 1000; 采样率t = 0:1/fs:1-1/fs; 时间向量x = sin(2*pi*50*t) + sin(2*pi*120*t); 输入信号noise = 2*randn(size(t)); 白噪声d = x + noise; 添加噪声后的输入信号使用自适应滤波器去除噪声order = 10; 滤波器阶数mu = 0.01; 学习率w = adaptfilt.lms(order, mu); 创建自适应滤波器对象[y, e] = filter(w, d, x); 滤波器输出和误差信号绘制结果subplot(2, 1, 1);plot(t, d);hold on;plot(t, y);legend('输入信号', '滤波器输出');xlabel('时间');ylabel('幅度');subplot(2, 1, 2);plot(t, e);legend('误差信号');xlabel('时间');ylabel('幅度');上述代码中,首先我们生成了一个包含两个正弦波的输入信号,然后添加了一些高斯白噪声。
自适应滤波器中的递归最小二乘(RLS)算法是一种用于自适应滤波的算法,通常用于系统辨识和信号处理。
这个算法主要用于根据输入和输出信号的关系来自适应地更新滤波器的权重,以达到最小均方误差的目标。
下面是一个简单的 MATLAB 示例,演示如何使用 RLS 算法实现自适应滤波器:
在这个示例中,我们首先生成一个随机的输入信号input_signal,然后使用一个未知
系统unknown_system生成目标输出信号desired_output。
接着,我们使用 RLS 算法不断更新滤波器的权重w,并最终比较估计的系统与真实系统的系数。
请注意,RLS 算法是一种高级的自适应滤波器算法,其背后的数学原理较为复杂。
在实际应用中,可以根据具体情况调整算法参数和输入信号来满足特定的需求。
自适应数字滤波器matlab实现利用自适应滤波法研究从宽带信号中提取单频信号的方法:1.设x(t)=s(t)+cos(2*pi*f*t), s(t)是宽带信号,f任选,要求提取cos(2*pi*f*t).、解:设单频信号频率f=1Hz,宽频信号s(t) 均值为0,方差为的白噪声。
以时间间隔Ts对输入信号进行采样,得到num个采样数据进行实验。
采用LMS准则的横向自适应滤波器W对x(t)进行自适应滤波,滤波器阶数(抽头数)为N,滤波器采用最陡下降法更新系数,调整步长为u。
将输入信号延迟delay个单位作为参考输入,因为宽频噪声延迟后的自相关值几乎为0,而单频周期信号仍有很强的相关性,因此通过递归调整,即可将宽频信号和单频信号分离。
通过取不同的实验参数,可以发现,调整步长越大,滤波器的抽头数越多,输出收敛于期望信号的速度越快,但与此同时,稳态误差却越大。
因此,应该选用合适的步长和阶数,在收敛速度和性能上取得权衡。
另外,延迟时间间隔越大,宽带信号的自相关性越弱,最终得到的输出稳态误差也越小,但所花费的时间也越长。
具体实验代码和实验结果如下:Ts=0.01; % 采样间隔num=1500; % 采样点数delay=100;% 延迟间隔N=10; % 滤波器抽头数u=0.001; % 调整步长k=1:num;f=cos(2*pi*k*Ts); % 单频信号s=0.5*randn(1,num);% 宽频信号x=s+f; % 输入信号x_in=[x zeros(1,delay)]; % 当前的输入信号x_delay=[zeros(1,delay),x]; % 延迟的输入信号M=num+delay;y=zeros(1,M); % 输出初始值w=zeros(1,N); % 滤波系数初始值for n=N:M-N+1xx=x_delay(n+N-1:-1:n); % 滤波器输入值y(n)=w*xx'; % 滤波器输出值e(n)=x_in(n)-y(n); % 误差值w=w+2*u.*e(n).*xx; % 系数调整endsubplot(4,1,1);plot(f(1:num));ylim([-2 2]);title('无噪声单频信号波形');subplot(4,1,2);plot(x(1:num));ylim([-2 2]);title('受宽带干扰的输入信号波形');subplot(4,1,3);plot(y(1:num));ylim([-2 2]);title('提取的单频信号波形');subplot(4,1,4);plot(e(1:num));ylim([-2 2]);title('滤去的宽带信号波形');程序运行输出:无噪声单频信号波形滤去的宽带信号波形。
自适应滤波器MATLAB仿真
摘要:本文介绍了自适应滤波器的工作原理,以及推导了著名的LMS(Least mean squares)算法。
以一个例子演示了自适应滤波器的滤波效果。
实验结果表明,该滤波器滤波效果较好。
关键词:自适应滤波器 MATLAB7.0 LMS算法
Simulate of adaptive filter based on MATLAB7.0
Abstract:This article described the working principle of adaptive filter and deduced the well-known LMS algorithm. Take an example to demonstrate the adaptive filters filtering effects. The results show that the filter has an effective way to filter single.
Key words:LMS algorithm Adaptive Filter Matlab7.0
1 引言
由Widrow B等提出的自适应滤波理论,是在维纳滤波、卡尔曼滤波等线性滤波基础上发展起来的一种最佳滤波方法。
由于它具有更强的适应性和更优的滤波性能,从而广泛应用于通信、系统辨识、回波消除、自适应谱线增强、自适应信道均衡、语音线性预测和自适应天线阵等诸多领域[1]。
自适应滤波器最大的优点在于不需要知道信号和噪声的统计特性的先验知识就可以实现信号的最佳滤波处理。
本文通过一个具体例子和结果论证了自适应滤波器的滤波效果。
2 自适应滤波原理及LMS算法
2.1 自适应滤波原理
自适应滤波原理图[2],如图1所示。
图1自适应滤波原理图
在自适应滤波器中,参数可调的数字滤波器一般为FIR数字滤波器,IIR数字滤波器或格型数字滤波器。
自适应滤波分2个过程。
第一,输入信号想x(n)通过参数可调的数字滤波器后得输出信号y(n),y(n)与参考信号d(n)进行比较得误差信号e(n);第二,通过一种自适应算法和x(n)和e(n)的值来调节参数可调的数字滤波器的参数,即加权系数,使之达到最佳滤波效果。
2.2 LMS 算法及相关参数的选择
LMS 算法最核心的思想是用平方误差代替均方误差[2]。
因此该算法简化了计算量。
在自适应噪音抵消系统中,如自适应滤波器参数选择不当,就达不到应有的滤波效果,而且还可能得到适得其反的效果。
因此针对不同的信号和噪声应选择相应的参数 [3]。
可见,参数的选择对滤波效果是至关重要的。
下面仅以L 阶加权自适应横向滤波器为例,推导LMS 算法的公式。
L 阶加权自适应横向滤波器,如图2所示。
图2 L 阶加权自适应横向滤波器
LMS 算法公式推导:
设()()()()1......x T
n x n x n x n L =--⎡⎤⎣⎦;
()()()()01......w T
L n w n w n w n =⎡⎤⎣⎦;其中()x n 为输入信号,()w n 为加权系数。
误差信号:()()()()()()()()()T T x w w x e n d n y n d n n n d n n n =-=-=- (1)
公式(1)中d (n )为参考信号,y(n) 为输出信号。
误差信号均方值:()()2n E e n ξ⎡⎤=⎣⎦
(2)
由公式(1)和公式(2)得: 均方误差性能曲面的梯度:
()()()()()()()ˆˆ22x w w n e n n n e n e n n ξ∂∂∇≈∇===-∂∂ (3) 而最陡下降法迭代计算全矢量公式:()()()1w w n n n μ+=-∇ (4) 公式(4)中μ为控制稳定性和收敛速度的参数。
由公式(3)和公式(4)得:()()()()12w w x n n e n n μ+=+ (5) 公式(5)说明了LMS 算法的核心是用每次迭代的粗略估计值代替了实际的精确值,
这样大大简化了计算量,但是不可否认,加权系数不可能准确的沿着理想的最陡下降路径来调整自身的参数,而加权系数与µ有着密切的关系。
因此,适当的选择自适应滤波器性能参数µ显得格外重要。
3 MATLAB7.0仿真
本例通过设计一个二阶加权系数自适应横向FIR滤波器,对一正弦信号加噪声信号进行滤波[4]。
为了实现该功能,得先生成一个标准正弦波信号s(n)和一个随机噪声信号n(n),然后将s(n)与n(n)相加就得到了加噪后的正弦信号x(n),再依照由LMS算法推导出来的公式(5),设计自适应滤波算法,对噪声干扰信号进行滤波,最后得到滤波后的信号e(n),实现程序代码如下:
clear
t=0:1/10000:1-0.0001;%设置迭代次数
s=sin(2*pi*t);%标准正弦信号
n=randn(size(t));%与时间t等长随机信号
x=s+n;%加噪信号
w=[0,0.5];%初始2阶加权系数
u=0.00026;%最佳参数
for i=1:9999;%自适应算法
y(i+1)=n(i:i+1)*w';
e(i+1)=x(i+1)-y(i+1);
w=w+2*u*e(i+1)*n(i:i+1);
end;
%画图程序
figure(1)
subplot(4,1,1)
plot(t,n);
title('Noise signal');xlabel('t');ylabel('n(t)');
subplot(4,1,2)
plot(t,s);
title('Sinusoidal signal');xlabel('t');ylabel('s(t)');
subplot(4,1,3)
plot(t,x);
title('Sinusoidal signal with noise');xlabel('t');ylabel('x(t)');
subplot(4,1,4)
plot(t,e);
title('the result of filtering');xlabel('t');ylabel('e(t)');
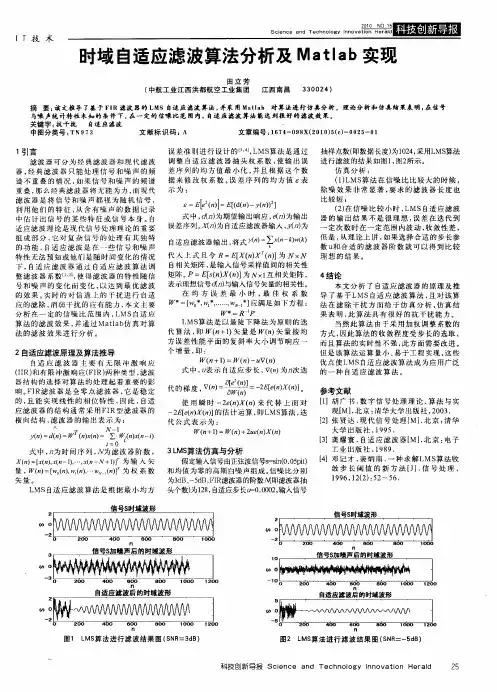
图3 µ取0.00026时的滤波效果图
当µ取0.00026时得到的效果较好。
前面一段时间较模糊是因为滤波器参数还没有调整到最佳,如图3所示。
由图可知当t取0.5时,已经找到了最佳加权系数。
图4 µ取0.000026时的滤波效果图
当µ取0.000026时,滤波结果几乎呈直线,而且线条很粗,说明寻找加权系数的速度太慢了,如图4所示。
图5 µ取0.26时的滤波效果图
当µ取0.26时,结果也是呈直线状,而且线条很细,有的地方还有毛刺,说明系统参数变化太快,系统还没有调整到最佳加权系数,如图5所示。
图6 µ取1时的滤波效果图
当µ取1时,系统输出混乱,如图6所示。
实验结果表明:不同的µ值得到的滤波效果是不同的。
通过实验数据观察得出:μ偏大时,自适应时间越短,自适应过程越快, 但它引起的失调也越大,所以导致滤波结果
很模糊,输出信号变化较大,当μ大于某个值时, 系统输出混乱;μ偏小时,系统比较稳定,输出信号变化小,失调也小,但自适应过程却相应加长了,因此参数μ的选择应从整个系统要求出发,在满足精度要求的前提下,尽量减少自适应时间。
最后,通过取合适的µ,改变w(n)的初始值,总可以找到最佳的加权系数。
本程序中迭代次数为10000。
因此,得出结论:当µ一定,迭代次数很大时,加权系数总可以找到最优解。
以下是W(n)初始值变化时的图像。
图7 W(n)=[0,0]
图8 W(n)= [0,0.5]
图9 W(n)= [0,1]
图10 W(n)= [0.5,0]
图11 W(n)= [0.5,0.5]
图12 W(n)= [0.5,1]
图13 W(n)= [1,0]
图14 W(n)= [1,0.5]
图15 W(n)= [1,1]
4 总结
通过这个例子,使我了解了自适应滤波器的工作原理,以及如何使用自适应滤波器去做信号处理的工作。
MATLAB在数字信号处理仿真方面有着强大的功能,通过这次实验,再次温习了一些指令的用法。
这个实验中还有一个问题是值得注意的,那就是如何寻找µ。
FIR 滤波器以其稳定和容易实现严格的线性相位,使信号处理后不产生相位畸变,而在实际中获得广泛的应用[5]。
参考文献
[1]叶华,吴伯修.变步长自适应滤波算法的研究[J]. 电子学报, 1990,18(4):63-69.
[2]姚天任,孙洪.现代数字信号处理[M].武汉:华中科技大学出版社,1999.
[3]吴轶刚,范猛.自适应滤波器参数选择和仿真结果[J].吉林工学院学报,2001,22(2):25-29.
[4]罗军辉等.MATLAB7.0在数字信号处理中的应用[M].北京:机械工业出版社,2005.
[5] 张亚妮.小波视频图像处理技术[J]. 辽宁工程技术大学学报, 2004,23(2): 230-232.。