4起飞性能
- 格式:ppt
- 大小:615.00 KB
- 文档页数:30
第4章起飞性能第一节起飞性能的限制一、速度的定义V mo/M mo最大操作限制速度,是在任何飞行阶段(爬升、巡航或下降)都不能故意超过的速度。
V mcg地面最小控制速度,是起飞滑跑时的校准空速,在这个速度时,当关键发动机突然不工作时,仅靠主要空气动力控制就可以对飞机保持控制(不用前轮转弯),使用正常驾驶技术就可以安全起飞。
V mca空中最小操纵速度,是校准空速,在这个速度时,当一台关键发动机突然不工作时,在该发动机保持不工作的状态,仍能够保持飞机的控制,并且可以利用不大于5度的坡度角保持飞机平直飞行。
V mcl进近和着陆的最小控制速度,是校准空速,在这个速度时,当关键发动机突然不工作时,仍可以利用工作的发动机对飞机保持控制,并且可以以不大于5度的坡度角保持飞机的平直飞行。
V mu最小不擦尾速度/最小离地速度,是校准空速,当等于或高于它时,飞机可以安全离开地面并继续起飞。
V s是校准的失速速度,是以海里/小时为单位的最小稳定飞行速度,在这个速度上,在失速速度时零推力或发动机在慢车时,飞机可以控制。
V EF发动机故障速度,是校准空速,假定关键发动机发生故障时的速度。
V1行动速度,是校准空速,是机组能够决定并作出减速动作,使飞机中断起飞的最大速度,并且可以保证将飞机停在跑道的限制范围内。
“JAR/FAR 25.107(a)(2) V1,由校准空速表示,由申请人选择;不过,V1 不得小于VEF 加上在加速--停止实验中,从关键发动机故障发生开始到飞行员发现故障并开始采取第一个措施动作(例如:刹车、收油门、放减速板)期间的速度增加值”。
V R抬前轮速度,是飞行员开始抬前轮的速度,正常抬轮速率约为3°/秒。
V LOF离地速度,是指飞机主轮离地时的校准空速。
V2起飞安全速度,是在发动机发生故障时,在高出跑道表面35英尺处必须达到的最小速度。
V MBE刹车能量限制速度,由于能量守恒,在中断起飞时,刹车必须吸收对应的飞机动能,并将其转化为热能。
第4章起飞性能第一节起飞性能的限制一、速度的定义V mJ M m最大操作限制速度,是在任何飞行阶段(爬升、巡航或下降)都不能故意超过的速度。
V mcg地面最小控制速度,是起飞滑跑时的校准空速,在这个速度时,当关键发动机突然不工作时,仅靠主要空气动力控制就可以对飞机保持控制(不用前轮转弯),使用正常驾驶技术就可以安全起飞。
V mc空中最小操纵速度,是校准空速,在这个速度时,当一台关键发动机突然不工作时,在该发动机保持不工作的状态,仍能够保持飞机的控制,并且可以利用不大于5度的坡度角保持飞机平直飞行。
V mcl进近和着陆的最小控制速度,是校准空速,在这个速度时,当关键发动机突然不工作时,仍可以利用工作的发动机对飞机保持控制,并且可以以不大于5度的坡度角保持飞机的平直飞行。
V mu最小不擦尾速度/最小离地速度,是校准空速,当等于或高于它时,飞机可以安全离开地面并继续起飞。
V s是校准的失速速度,是以海里/小时为单位的最小稳定飞行速度,在这个速度上,在失速速度时零推力或发动机在慢车时,飞机可以控制。
V EF发动机故障速度,是校准空速,假定关键发动机发生故障时的速度。
V i行动速度,是校准空速,是机组能够决定并作出减速动作,使飞机中断起飞的最大速度,并且可以保证将飞机停在跑道的限制范围内。
“ JAR/FAR 25.107(a)(2) V1 ,由校准空速表示,由申请人选择;不过,V1不得小于VEF加上在加速--停止实验中,从关键发动机故障发生开始到飞行员发现故障并开始采取第一个措施动作(例如:刹车、收油门、放减速板)期间的速度增加值”。
V R抬前轮速度,是飞行员开始抬前轮的速度,正常抬轮速率约为3° /秒。
V LO离地速度,是指飞机主轮离地时的校准空速。
V2起飞安全速度,是在发动机发生故障时,在高出跑道表面35英尺处必须达到的最小速度。
V MB刹车能量限制速度,由于能量守恒,在中断起飞时,刹车必须吸收对应的飞机动能,并将其转化为热能。


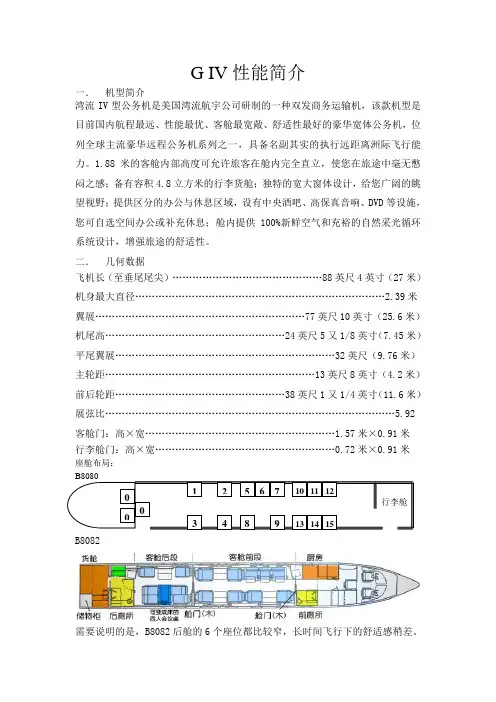
G IV性能简介一.机型简介湾流IV型公务机是美国湾流航宇公司研制的一种双发商务运输机,该款机型是目前国内航程最远、性能最优、客舱最宽敞、舒适性最好的豪华宽体公务机,位列全球主流豪华远程公务机系列之一,具备名副其实的执行远距离洲际飞行能力。
1.88米的客舱内部高度可允许旅客在舱内完全直立,使您在旅途中毫无憋闷之感;备有容积4.8立方米的行李货舱;独特的宽大窗体设计,给您广阔的眺望视野;提供区分的办公与休息区域,设有中央酒吧、高保真音响、DVD等设施,您可自选空间办公或补充休息;舱内提供100%新鲜空气和充裕的自然采光循环系统设计,增强旅途的舒适性。
二.几何数据飞机长(至垂尾尾尖)………………………………………88英尺4英寸(27米)机身最大直径…………………………………………………………………2.39米翼展………………………………………………………77英尺10英寸(25.6米)机尾高………………………………………………24英尺5又1/8英寸(7.45米)平尾翼展…………………………………………………………32英尺(9.76米)主轮距………………………………………………………13英尺8英寸(4.2米)前后轮距……………………………………………38英尺1又1/4英寸(11.6米)展弦比……………………………………………………………………………5.92 客舱门:高×宽…………………………………………………1.57米×0.91米行李舱门:高×宽………………………………………………0.72米×0.91米座舱布局:B8082需要说明的是,B8082后舱的6个座位都比较窄,长时间飞行下的舒适感稍差。
三.使用限制1.基本重量数据:最大无油重量………………………………………………46500LB(21092KG)最大无油重量(有ASC 61)………………………………49000LB(22226KG)最大机坪重量………………………………………………73600LB(33385KG)最大起飞重量(结构限制)………………………………73200LB(33204KG)最大着陆重量(结构限制)………………………………58500LB(26536KG)基本使用重量………………………………………………43210LB(19600KG)最大销售旅客行李重量:……………………………………550磅(250公斤)2.其它限制1).最大起飞/着陆气压高度………………………………15000FT(4572M)2).最大起飞/着陆顺风风速……………………………………………10KTS3).最大起飞/着陆侧风分量(90°)…………………………………24KTS4).最大跑道坡度 (2)5).两侧机翼燃油最大不平衡量(所有飞行阶段)W<55000LB时……………………………………………………2000LBW>60500LB时…………………………………………………… 400LB55000LB≤W≤60500LB时…………按(-16/55W+18000)LB线性变化6).最大使用高度…………………………………………45000FT(13716M)7).最大使用速度…………………………………… V MO=340KCAS/M MO=0.88最大使用速度(有ASC 61)…………………… V MO=320KCAS/M MO=0.868).起飞/着陆环境温度限制……………………………………-40℃—50℃9).使用温度限制…………………………………………………-70℃—50℃10).机动飞行最大允许过载襟翼收上…………………………………………………………-1.0—2.5G襟翼放下……………………………………………………………0—2.0G11).燃油种类及燃油最低温度JET A (30)JET A-1 (40)12).可用燃油载量………………………………………29500LB(13381KG)13).最小转弯半径(180°)…………………………………………54FT2IN前轮最大偏转角度……………………………………………………82°14)a.机场标高不超过7000FT;b.气温不超过ISA+20;c.起飞速度不小于V1/VR=0.8;d.不得使用减推力起飞;e.襟翼:起飞仅使用20,着陆仅使用39;f.反推、防滞和自动扰流板工作;g.跑道坡度:起飞不大于+1%,着陆不得为负(上坡为正,下坡为负);h.RSC(道面污染物深度)≥0.2时,顶风不得超过20KTS,RSC<0.2时,顶风不得超过40KTS。
四轴飞行器评价标准1.引言1.1 概述四轴飞行器是一种通过四个电动机带动螺旋桨实现垂直起降和飞行的无人机。
它采用了先进的飞行控制技术和稳定系统,具有灵活、机动性强的特点。
随着科技的不断发展,四轴飞行器已经成为无人机领域中最常见和最受欢迎的机型之一。
本文旨在对四轴飞行器的评价标准进行探讨和总结,帮助读者更好地了解和选择适合自己需求的飞行器。
为了达到这一目的,本文将从轴距和负载能力以及飞行稳定性和控制性能两个方面进行详细的分析和评价。
首先,轴距和负载能力是评价一个四轴飞行器性能的重要指标。
轴距决定了飞行器的体积和稳定性,较长的轴距可以提高飞行器的稳定性和飞行平稳度。
负载能力则表征了飞行器携带物品的能力,这对于特定应用场景中的物品运输和投放任务非常关键。
其次,飞行稳定性和控制性能是评价四轴飞行器好坏的核心要素之一。
飞行稳定性包括飞行器在不同环境和风力条件下的稳定性能力,例如对风的适应能力和平稳悬停能力。
控制性能则涉及到飞行器的操控能力和敏捷性,对于需要进行精确控制和灵活飞行的应用场景尤为重要。
本文将通过综合评价标准的引入,对四轴飞行器进行全面且客观的评价。
综合评价标准将考虑以上所述的轴距、负载能力、飞行稳定性和控制性能等多个因素,从而为读者提供一个量化的、综合考虑飞行器性能的方法。
最后,本文将根据以上评价标准,推荐适用于不同场景的四轴飞行器的选择。
这将帮助读者更加准确地了解不同飞行器的特点和适用范围,从而满足不同需求的飞行任务。
通过本文的编写,我们希望能够为读者提供一个全面和系统的四轴飞行器评价标准,帮助他们在选择和购买飞行器时做出明智的决策,并找到最适合自己需求的飞行器。
同时,我们也希望通过本文的总结和推荐,为四轴飞行器的发展和应用提供一些参考和借鉴。
1.2 文章结构本文将按照以下结构进行展开讨论四轴飞行器的评价标准:1. 引言:介绍本文的背景和目的,概述四轴飞行器的基本概念和应用背景。
2. 正文:主要分为两个部分,分别是轴距和负载能力以及飞行稳定性和控制性能。
起飞性能介绍第⼀部分起飞性能理论起飞的定义:对我们通常意义上所说的起飞在理论上叫起飞航迹.对起飞航迹的定义如下:起飞航迹:从静⽌点(滑跑开始点)到下列两点中的较⾼者:飞机起飞过程中⾼于起飞表⾯1500FT点或完成从起飞到航路构⾏的转变,并达到起飞最后阶段规定速度和爬升梯度的点.起飞航迹组成:由起飞、起飞飞⾏航迹两部分过程组成.①起飞:起飞开始到⾼度35ft,并达到起飞安全速度V2的航迹.②起飞飞⾏航迹:起飞的终点到起飞航迹的终点.1.平衡场地的三种起飞过程:(图⼀)①全发正常:从松刹车开始,全发加速滑跑到VR,在VLOF离地,加速爬升到35FT,速度达到V2安全速度.FAR规定的起飞跑道距离应为实际起飞跑道距离的1.15倍.②继续起飞:从松刹车开始,全发加速滑跑,在速度VEF⼀台发动机停车,驾驶员在规定时间内做出判断后的速度达到V1,飞机在临界发动机不⼯作的条件下继续起飞,在跑道端速度达到V2,⾼度35FT.FAR规定VEF-V1的判断时间0-2秒,起飞跑道长度为起飞实际距离.③中断起飞:从松刹车开始,全发加速滑跑,在速度VEF时临界发动机实效,在规定时间内驾驶员做出判断,在速度V1时开始采取减速措施(油门慢车位,刹车,使⽤减速板),最后由于采取了减速措施使飞机安全停⽌在跑道上(其中不计反推效应).中断起飞各段组成:全发加速段(0-VEF)、判断阶段(VEF-△V,0-2秒)、减速过渡段(V1-VB)、减速停⽌段(VB-0)对过渡段采取措施的时间根据管理机构和公司的要求各不相同. 通常试飞验证的过渡段时间(2秒以内)⽐规定时间(3-4秒之间)要短⼀些.2.起飞过程中的⼏种速度的定义:决断速度临界发动机在该速度被判定停车时,驾驶员可以安全地继续或中断起飞, 且继续起飞的距离不会超过可⽤的起飞距离,中断起飞距离也不超过可⽤的中断起飞距离.V1不得⼩于最⼩地⾯操纵速度,也不得⼤于抬前轮速度.VR≥V1≥VMCGV1与VEF关系:V1⼤于(等于)VEF+规定时间内临界发动机不⼯作时飞机速度增量之和.抬前轮速度是飞机开始抬前轮的速度,在该速度抬前轮能使飞机在起飞终点⾼于起飞表⾯35FT并速度达到V2.VR≥V1VR≥105%VMCA对任何⼀组给定的条件(飞机重量,飞机构形和环境温度等)继续起飞和全发起飞均使⽤相同的VR值.起飞安全速度飞机在起飞终点应达到的速度.V2≧1.2VS(双发) V2≧1.15VS(三发以上)V2≧1.1VMC(空中最⼩操纵速度)使⽤V2安全速度的意义:1.当速度稍⼩于上述要求值时,飞机仍能保持正的爬升梯度.2.由于风或驾驶员操作不当引起速度减⼩时,仍能保持操纵.3.有⼀定的应⾓裕度,以防遇到向上阵风时造成失速.4.当⼀发停车并伴随有速度误差时,飞机仍能保持操纵.最⼩离地速度全发⼯作或⼀发不⼯作时,飞机可在最⼩离地速度VMU 安全离地并继续起飞,不会出现擦尾的危险.实际使⽤中与飞机外形及发动机状态的有关.离地速度VLOF是飞机开始腾空瞬间的速度.全发起飞时不⼩于110%VMU,如飞机有腹鳍和姿态警告系统(AWS),VLOF不⼩于108%VMU,单发时要求VLOF不⼩于105%VMU.最⼩操纵速度VMCA:在该速度,临界发动机停车,能在该发动机继续停车情况下恢复对飞机的操纵,维持0偏航或坡度不⼤于5度的直线飞⾏.维持⽅向舵所需的⽅向舵脚蹬⼒不超过150磅.VMCG:在该速度,当临界发动机停车时,有可能仅使⽤⽓动⼒主操纵(不使⽤前轮转弯)来恢复对飞机的操纵,⽤正常的驾驶技巧和不超过150磅⽅向舵脚蹬⼒能安全地完成继续起飞.通过试飞获得.3.平衡场地长度和⾮平衡场地长度(1)平衡场地长度平衡场地长度指临界发动机停车时,按继续起飞距离等于中断起飞距离⽽确定的场地长度,在其他条件不变时,决断速度增⼤,则继续起飞的距离缩短,中断起飞距离增⼤,只在某⼀V1值时两种距离才相等,此时V1表⽰为V1BAL.平衡场地起飞时的关系式:A+B+C=A+D+E全发起飞时的V2和VLOF值⽐单发时⼤些,VR相同.V1后速度增加1节左右后开始减速.平衡长度⽰意图(2)⾮平衡场地长度不满⾜平衡场地长度条件时确定的场地长度为⾮平衡场地长度.出现情况有两类:(A)按平衡场地长度考虑时,由于要满⾜对起飞速度的有关要求⽽出现⾮平衡场地长度情况.(B)由于使⽤了净空道和安全道后,使继续起飞距离不等于中断起飞距离⽽出现的⾮平衡场地长度情况.*FAR净空道定义:净空道对称地设置在跑道中⼼延长线上,宽度不⼩于500英尺,其净空道⾯从跑道端开始,以把超过1.25%的坡度向上延伸,除在跑道前端两侧处有⾼度不⼤于26英⼨的跑道灯外,没有任何地形或障碍物穿过此⾯.净空道的地⾯应处于机场当局的控制与管辖之内.净空道仅供飞机飞越.*FAR安全道定义:安全道对称地设在跑道延长线上,宽度不⼩于跑道宽度,道⾯强度⾜以⽀持中断起飞的飞机重量,安全道仅供中断起飞时飞机减速滑跑⽤.FAR 关于使⽤净空道和安全道的三个条件:A. 中断起飞距离不得超过跑道长度与安全道之和B. 继续起飞距离不得超过跑道长度与净空道之和C. 起飞滑跑距离加上⼀半拉起爬升距离不得超过跑道长度4.起飞航迹分段和各段对爬升梯度的要求(1)第⼀段从飞机离地35FT起到起落架受上⽌.使⽤起飞推⼒,襟翼位置不变.升降速度表指⽰正值时开始收起落架,表速V2,等表速爬升.(2)第⼆段等表速爬升段,爬⾼以保证安全.使⽤起飞推⼒,等表速V2爬升,襟翼位置不变,爬升到400FT⽌.(3)第三段收襟翼段,平飞加速到爬升速度VC,使⽤起飞推⼒或最⼤连续推⼒,随速度增加逐渐收上襟翼,VC≧1.25VS.(3)第四段最后爬升段,最⼤连续推⼒,光洁机⾝,使⽤VC速度爬升到1500FT.**FAR-25对上述各段可⽤最⼩爬升梯度要求:双发飞机:第⼀段:正梯度第⼆段:2.4%第四段:1.2%**净梯度:考虑到仪表及操作误差的影响,如果在爬升越障过程中以实际的爬升梯度对应的总航迹与障碍物进⾏⽐较,有可能不能保证飞⾏的安全,因此引进净航迹的概念,即在总航迹对应的实际梯度上减⼩0.8%作为净航迹对应的净梯度,以净航迹⾼出障碍物35英尺为标准来进⾏越障评估.双发飞机减去0.8%为净梯度5.灵活推⼒起飞(1)原理灵活推⼒法也叫假想温度法.当外界温度升⾼,发动机推⼒由于受到排⽓温度限制⽽要减⼩,灵活温度法即⽤这种发动机推⼒变化的规律来确定在飞机起飞重量没有达到最⼤起飞重量时发动机推⼒可以减⼩的值.具体确定的⽅法是假设⼀个较⾼的温度,在该温度由于发动机受排⽓温度限制⽽提供的⼀个⽐正常温度时⼩的输出马⼒刚好能保证对实际起飞重量的的要求.(2)MD-82灵活温度设计⽅法MD-82(JT8D-217A)机型是按照减⼩推⼒额定值⽅法和灵活推⼒理论组合使⽤⽽设计的.JT8D-217A发动机是按照减⼩发动机功率输出额定值的⽅法提供发动机的推⼒,图中MAX所对应的图线为该发动机可提供的最⼤EPR限制范围,NORM所对应的图线为发动机提供的减⼩额定值后的EPR限制范围(此时减⼩的EPR储存于ART),实际上这种减⼩额定值后所提供的NORM EPR 限制本⾝已经是减⼩推⼒起飞了.图中MAX为最⼤EPR限制图线,NORM为正常EPR限制图线.①当温度低于T1(MD-82,JT8D217A⼀般为29度),发动机EPR值不变,MAX EPR=1.99;NORM EPR=1.93②当灵活温度低于T2时,NORM EPR + △EPR ⼤于1.93(NORMEPR的最⼤值)③T A,TB的含义:使⽤正常推⼒在外界温度为TA时所对应的EPR值,等于在假设温度⽤最⼤起飞推⼒(即正常EPR+ART关⽽增加的推⼒),当外界实际温度⾼于TA时,正常起飞推⼒将⼩于假设温度所对应的最⼤推⼒,所以不可以使⽤灵活推⼒起飞.当外界实际温度低于TA时,正常起飞推⼒⼤于假设温度对应的最⼤推⼒,说明发动机可以提供所需马⼒的要求,所以可⽤灵活推⼒起飞.假设温度TB,起飞推⼒为TB所对应的最⼤EPR.6.污染跑道起飞(1)跑道上覆盖2-3毫⽶以下的⽔时,称为湿跑道.(2)跑道上覆盖3毫⽶以上的⽔、雪浆、湿雪和⼲雪时,称为污染跑道.(3)麦道公司在飞⾏性能⼿册中以1/2和1/4两种污染程度提供了在污染跑道起飞时的跑道换算⽅法,即以污染跑道换算成相当于⼲跑道的换算跑道长度,以此换算⼲跑道长度做起飞性能分析.见(机组操作⼿册-性能分册-起飞部分) Section 7 2-20-40 page 9(4)在污染跑道上起飞,如果还使⽤⼲跑道时的数据(飞机重量,发动机推⼒等数据不变),只是把V1速度⼩到最⼩地⾯操纵速度来操作,⽽不做起飞重量和的校验和修正,这种⽅法会造成起飞距离的⾮平衡场地情况的出现,继续起飞距离有可能超出跑道长度范围.所以,在操作中建议使⽤麦道公司提供的污染跑道计算软件提供的数据或按飞⾏⼿册中提供的数据减⼩起飞重量,并按换算⼲场地长度进⾏快速查表进⾏起飞性能分析.见(机组操作⼿册-性能分册-起飞部分)Section 7 2-20-40 Page 9到20 页7.最⼤起飞重量对最⼤起飞重量的限制较多,在实际使⽤中我们经常遇到的(除飞机结构强度限制)是场地长度限制和第⼆阶段爬升梯度及越障限制.(1)最佳襟翼概念的引进就是因为它是同时满⾜上述两种限制情况下的能使起飞重量达到最⼤值的襟翼⾓度.因为起飞航迹是由起飞和起飞飞⾏航迹两个阶段组成,所以我们在考虑起飞重量限制时⼀定要满⾜上述两种情况的要求,也就是要满⾜场地长度对起飞重量的限制,还要考虑第⼆爬升阶段梯度和净航迹越障对起起飞重量的要求.⽆论是⽤麦道公司提供的软件进⾏计算还是应⽤机组操作⼿册(性能⼿册)进⾏查表计算,最佳襟翼的使⽤都是符合上述两个阶段的对飞⾏安全要求.(2)在使⽤11度襟翼起飞时,为满⾜对场地长度和爬升限制的要求,麦道公司计算软件在固定襟翼计算模式中对场地限制和爬升限制进⾏了分别计算,这要求飞⾏员在查起飞性能数据表时,要拿场地限制的最⼤起飞重量和对应温度的最⼤起飞重量进⾏⽐较,得出的最⼤起飞重量必须同时符合场地和爬升这两种限制.如果只考虑了场地限制⽽忽视了爬升限制,使起飞重量超出了单发爬升越障限制,在单发继续起飞爬升过程中就不能保证飞⾏安全.。
4发倾转旋翼机参数一、引言4发倾转旋翼机是一种具有垂直起降和水平飞行能力的飞行器。
它采用了倾转旋翼技术,通过旋翼的倾斜来实现向前飞行。
下面将详细介绍这种飞行器的参数及其应用。
二、参数1:旋翼直径旋翼直径是指旋翼从一端到另一端的长度。
它影响着旋翼的升力和稳定性能。
较大的旋翼直径能够提供更大的升力,但同时也增加了飞行器的重量和空气阻力。
因此,在设计4发倾转旋翼机时,需要权衡旋翼直径与飞行性能之间的关系。
三、参数2:最大起飞重量最大起飞重量是指飞行器在起飞时所能承受的最大重量。
它决定了飞行器的运载能力和飞行距离。
一般来说,较大的最大起飞重量意味着更大的飞行器尺寸和更强的动力系统。
在实际应用中,根据任务需求和飞行器的设计要求,可以调整最大起飞重量以满足不同的需求。
四、参数3:航程航程是指飞行器在一次飞行中所能覆盖的距离。
它与燃料容量、燃料效率以及飞行速度等因素密切相关。
较长的航程意味着飞行器能够在一次飞行中覆盖更远的距离,从而扩大了其应用范围。
对于4发倾转旋翼机来说,提高燃料效率和减少空气阻力是增加航程的关键。
五、参数4:飞行速度飞行速度是指飞行器在空中飞行时所达到的速度。
它直接影响着飞行器的飞行效率和飞行时间。
对于4发倾转旋翼机来说,提高飞行速度可以缩短飞行时间,提高任务效率。
然而,较高的飞行速度也会增加空气阻力和机身受力,对飞行器的设计和材料选择提出了更高的要求。
六、应用领域4发倾转旋翼机由于具有垂直起降和水平飞行的能力,因此在航空领域有着广泛的应用。
它可以用于军事侦察、紧急救援、货运运输等任务。
同时,由于其灵活性和适应性,4发倾转旋翼机也被用于影视拍摄、科学研究等非军事领域。
七、总结4发倾转旋翼机是一种具有垂直起降和水平飞行能力的飞行器。
它的参数包括旋翼直径、最大起飞重量、航程和飞行速度等。
这些参数直接影响着飞行器的性能和应用范围。
在设计和应用4发倾转旋翼机时,需要综合考虑这些参数,以满足不同的需求和任务要求。
起飞阶段的名词解释航空领域中,起飞阶段是飞机从地面升空到达巡航高度之前的一段过程。
这一阶段可以说是飞行的最关键时刻,它涉及到众多专业术语和概念。
在本文中,我们将解释起飞阶段涉及到的一些重要名词,以帮助读者更好地理解这个阶段的复杂性和重要性。
1. V1速度(V1 Speed)V1速度是飞机起飞过程中很重要的一个概念。
它指的是飞机在发生引擎失效等紧急情况时,必须做出中止起飞的决策的最后速度。
V1速度的确定是基于飞机类型、跑道长度、环境条件等多个因素进行计算的。
一旦飞机达到V1速度,飞行员将不再考虑中止起飞,而是继续进行起飞过程。
2. Vr速度(Vr Speed)Vr速度是飞机起飞过程中的另一个重要概念。
它指的是飞机起飞时,飞行员开始提拉机头使飞机离开地面的速度。
Vr速度的选择取决于飞机类型、机载设备和环境条件等因素。
飞行员在达到Vr速度时,必须准备好控制飞机的姿态,保证安全地离开地面。
3. 飞机起飞角(Takeoff Angle)飞机起飞角是指飞机起飞时机头与地面之间的夹角。
飞机起飞角的选择对起飞性能和安全性都有重要影响。
通常情况下,起飞角要根据飞机性能、跑道长度、气温和高度等因素进行计算和调整。
起飞角越大,飞机将更快地抬升,但同时也会增加起飞距离和对发动机的负荷。
4. 起飞限制性能(Takeoff Performance Limitations)起飞限制性能是指诸如起飞距离、速度、重量和高度等参数的限制和要求。
航空公司和飞行员必须严格遵守这些限制,以确保安全起飞。
起飞限制性能的计算将考虑飞机性能、气温、高度、跑道长度和重量等因素。
如果起飞限制性能超出了飞机的能力范围,飞行员必须采取相应的措施,如减载或改变起飞计划。
5. 爬升率(Rate of Climb)爬升率是指飞机在起飞阶段垂直上升的速度。
它通常以英尺/分钟或米/分钟来衡量。
爬升率与飞机的引擎性能、重量、气温和高度等因素相关。
爬升率的高低直接影响着飞机的能力,尤其在起飞后需要快速达到巡航高度或避免障碍物的情况下。