abaqus系列教程-13ABAQUSExplicit准静态分析
- 格式:doc
- 大小:796.50 KB
- 文档页数:29
准静态分析——ABAQUS/Explicit准静态过程(guasi-static process)在过程进行的每一瞬间,系统都接近于平衡状态,以致在任意选取的短时间dt内,状态参量在整个系统的各部分都有确定的值,整个过程可以看成是由一系列极接近平衡的状态所构成,这种过程称为准静态过程。
无限缓慢地压缩和无限缓慢地膨胀过程可近似看作为准静态过程。
准静态过程是一种理想过程,实际上是办不到的。
准静态原为一个热力学概念,在这里引用主要是指模型在加载的过程中任意时刻所经历的中间状态都可近似地视为静力状态,因此当加载过程进行得无限缓慢时,在各个时刻模型所处的状态就可近似地看作是静态,该过程便是准静态过程。
准静态啮合过程仿真主要考虑的是弧齿锥齿轮副在加载时的接触状态,以及齿面和齿根的应力变化规律,其前提是不考虑齿轮副惯性的影响。
ABAQUS/Explicit准静态分析显式求解方法是一种真正的动态求解过程,它的最初发展是为了模拟高速冲击问题,在这类问题的求解中惯性发挥了主导性作用。
当求解动力平衡的状态时,非平衡力以应力波的形式在相邻的单元之间传播。
由于最小稳定时间增量一般地是非常小的值,所以大多少问题需要大量的时间增量步。
在求解准静态问题上,显式求解方法已经证明是有价值的,另外ABAQUS/Explicit在求解某些类型的静态问题方面比ABAQUS/Standard更容易。
在求解复杂的接触问题时,显式过程相对于隐式过程的一个优势是更加容易。
此外,当模型很大时,显式过程比隐式过程需要较少的系统资源。
将显式动态过程应用于准静态问题需要一些特殊的考虑。
根据定义,由于一个静态求解是一个长时间的求解过程,所以在其固有的时间尺度上分析模拟常常在计算上是不切合实际的,它将需要大量的小的时间增量。
因此,为了获得较经济的解答,必须采取一些方式来加速问题的模拟。
但是带来的问题是随着问题的加速,静态平衡的状态卷入了动态平衡的状态,在这里惯性力成为更加起主导作用的力。
准静态分析——ABAQUS/Explicit准静态过程(guasi-static process)在过程进行的每一瞬间,系统都接近于平衡状态,以致在任意选取的短时间dt内,状态参量在整个系统的各部分都有确定的值,整个过程可以瞧成就是由一系列极接近平衡的状态所构成,这种过程称为准静态过程。
无限缓慢地压缩与无限缓慢地膨胀过程可近似瞧作为准静态过程。
准静态过程就是一种理想过程,实际上就是办不到的。
准静态原为一个热力学概念,在这里引用主要就是指模型在加载的过程中任意时刻所经历的中间状态都可近似地视为静力状态,因此当加载过程进行得无限缓慢时,在各个时刻模型所处的状态就可近似地瞧作就是静态,该过程便就是准静态过程。
准静态啮合过程仿真主要考虑的就是弧齿锥齿轮副在加载时的接触状态,以及齿面与齿根的应力变化规律,其前提就是不考虑齿轮副惯性的影响。
ABAQUS/Explicit准静态分析显式求解方法就是一种真正的动态求解过程,它的最初发展就是为了模拟高速冲击问题,在这类问题的求解中惯性发挥了主导性作用。
当求解动力平衡的状态时,非平衡力以应力波的形式在相邻的单元之间传播。
由于最小稳定时间增量一般地就是非常小的值,所以大多少问题需要大量的时间增量步。
在求解准静态问题上,显式求解方法已经证明就是有价值的,另外ABAQUS/Explicit在求解某些类型的静态问题方面比ABAQUS/Standard更容易。
在求解复杂的接触问题时,显式过程相对于隐式过程的一个优势就是更加容易。
此外,当模型很大时,显式过程比隐式过程需要较少的系统资源。
将显式动态过程应用于准静态问题需要一些特殊的考虑。
根据定义,由于一个静态求解就是一个长时间的求解过程,所以在其固有的时间尺度上分析模拟常常在计算上就是不切合实际的,它将需要大量的小的时间增量。
因此,为了获得较经济的解答,必须采取一些方式来加速问题的模拟。
但就是带来的问题就是随着问题的加速,静态平衡的状态卷入了动态平衡的状态,在这里惯性力成为更加起主导作用的力。
准静态分析——ABAQUS/Explicit准静态过程(guasi-static process)在过程进行的每一瞬间,系统都接近于平衡状态,以致在任意选取的短时间dt内,状态参量在整个系统的各部分都有确定的值,整个过程可以看成是由一系列极接近平衡的状态所构成,这种过程称为准静态过程。
无限缓慢地压缩和无限缓慢地膨胀过程可近似看作为准静态过程。
准静态过程是一种理想过程,实际上是办不到的。
准静态原为一个热力学概念,在这里引用主要是指模型在加载的过程中任意时刻所经历的中间状态都可近似地视为静力状态,因此当加载过程进行得无限缓慢时,在各个时刻模型所处的状态就可近似地看作是静态,该过程便是准静态过程。
准静态啮合过程仿真主要考虑的是弧齿锥齿轮副在加载时的接触状态,以及齿面和齿根的应力变化规律,其前提是不考虑齿轮副惯性的影响。
ABAQUS/Explicit准静态分析显式求解方法是一种真正的动态求解过程,它的最初发展是为了模拟高速冲击问题,在这类问题的求解中惯性发挥了主导性作用。
当求解动力平衡的状态时,非平衡力以应力波的形式在相邻的单元之间传播。
由于最小稳定时间增量一般地是非常小的值,所以大多少问题需要大量的时间增量步。
在求解准静态问题上,显式求解方法已经证明是有价值的,另外ABAQUS/Explicit在求解某些类型的静态问题方面比ABAQUS/Standard更容易。
在求解复杂的接触问题时,显式过程相对于隐式过程的一个优势是更加容易。
此外,当模型很大时,显式过程比隐式过程需要较少的系统资源。
将显式动态过程应用于准静态问题需要一些特殊的考虑。
根据定义,由于一个静态求解是一个长时间的求解过程,所以在其固有的时间尺度上分析模拟常常在计算上是不切合实际的,它将需要大量的小的时间增量。
因此,为了获得较经济的解答,必须采取一些方式来加速问题的模拟。
但是带来的问题是随着问题的加速,静态平衡的状态卷入了动态平衡的状态,在这里惯性力成为更加起主导作用的力。
准静态分析——ABAQUS/Explicit准静态过程(guasi-static process)在过程进行的每一瞬间,系统都接近于平衡状态,以致在任意选取的短时间dt内,状态参量在整个系统的各部分都有确定的值,整个过程可以看成是由一系列极接近平衡的状态所构成,这种过程称为准静态过程。
无限缓慢地压缩和无限缓慢地膨胀过程可近似看作为准静态过程。
准静态过程是一种理想过程,实际上是办不到的。
准静态原为一个热力学概念,在这里引用主要是指模型在加载的过程中任意时刻所经历的中间状态都可近似地视为静力状态,因此当加载过程进行得无限缓慢时,在各个时刻模型所处的状态就可近似地看作是静态,该过程便是准静态过程。
准静态啮合过程仿真主要考虑的是弧齿锥齿轮副在加载时的接触状态,以及齿面和齿根的应力变化规律,其前提是不考虑齿轮副惯性的影响。
ABAQUS/Explicit准静态分析显式求解方法是一种真正的动态求解过程,它的最初发展是为了模拟高速冲击问题,在这类问题的求解中惯性发挥了主导性作用。
当求解动力平衡的状态时,非平衡力以应力波的形式在相邻的单元之间传播。
由于最小稳定时间增量一般地是非常小的值,所以大多少问题需要大量的时间增量步。
在求解准静态问题上,显式求解方法已经证明是有价值的,另外ABAQUS/Explicit在求解某些类型的静态问题方面比ABAQUS/Standard更容易。
在求解复杂的接触问题时,显式过程相对于隐式过程的一个优势是更加容易。
此外,当模型很大时,显式过程比隐式过程需要较少的系统资源。
将显式动态过程应用于准静态问题需要一些特殊的考虑。
根据定义,由于一个静态求解是一个长时间的求解过程,所以在其固有的时间尺度上分析模拟常常在计算上是不切合实际的,它将需要大量的小的时间增量。
因此,为了获得较经济的解答,必须采取一些方式来加速问题的模拟。
但是带来的问题是随着问题的加速,静态平衡的状态卷入了动态平衡的状态,在这里惯性力成为更加起主导作用的力。
准静态分析——ABAQUS/Explicit准静态过程(guasi-static ProCeSS )在过程进行的每一瞬间,系统都接近于平衡状态,以致在任意选取的短时间dt内,状态参量在整个系统的各部分都有确定的值,整个过程可以看成是由一系列极接近平衡的状态所构成,这种过程称为准静态过程。
无限缓慢地压缩和无限缓慢地膨胀过程可近似看作为准静态过程。
准静态过程是一种理想过程,实际上是办不到的。
准静态原为一个热力学概念,在这里引用主要是指模型在加载的过程中任意时刻所经历的中间状态都可近似地视为静力状态,因此当加载过程进行得无限缓慢时,在各个时刻模型所处的状态就可近似地看作是静态,该过程便是准静态过程。
准静态啮合过程仿真主要考虑的是弧齿锥齿轮副在加载时的接触状态,以及齿面和齿根的应力变化规律,其前提是不考虑齿轮副惯性的影响。
ABAQUS/Explicit 准静态分析显式求解方法是一种真正的动态求解过程,它的最初发展是为了模拟高速冲击问题,在这类问题的求解中惯性发挥了主导性作用。
当求解动力平衡的状态时,非平衡力以应力波的形式在相邻的单元之间传播。
由于最小稳定时间增量一般地是非常小的值,所以大多少问题需要大量的时间增量步。
在求解准静态问题上,显式求解方法已经证明是有价值的,另外ABAQUS/Explicit 在求解某些类型的静态问题方面比ABAQUS/Standard更容易。
在求解复杂的接触问题时,显式过程相对于隐式过程的一个优势是更加容易。
此外,当模型很大时,显式过程比隐式过程需要较少的系统资源。
将显式动态过程应用于准静态问题需要一些特殊的考虑。
根据定义,由于一个静态求解是一个长时间的求解过程,所以在其固有的时间尺度上分析模拟常常在计算上是不切合实际的,它将需要大量的小的时间增量。
因此,为了获得较经济的解答,必须采取一些方式来加速问题的模拟。
但是带来的问题是随着问题的加速,静态平衡的状态卷入了动态平衡的状态,在这里惯性力成为更加起主导作用的力。
准静态分析——ABAQUS/Explicit准静态过程(guasi-static process)在过程进行的每一瞬间,系统都接近于平衡状态,以致在任意选取的短时间dt内,状态参量在整个系统的各部分都有确定的值,整个过程可以看成是由一系列极接近平衡的状态所构成,这种过程称为准静态过程。
无限缓慢地压缩和无限缓慢地膨胀过程可近似看作为准静态过程。
准静态过程是一种理想过程,实际上是办不到的。
准静态原为一个热力学概念,在这里引用主要是指模型在加载的过程中任意时刻所经历的中间状态都可近似地视为静力状态,因此当加载过程进行得无限缓慢时,在各个时刻模型所处的状态就可近似地看作是静态,该过程便是准静态过程。
准静态啮合过程仿真主要考虑的是弧齿锥齿轮副在加载时的接触状态,以及齿面和齿根的应力变化规律,其前提是不考虑齿轮副惯性的影响。
ABAQUS/Explicit准静态分析显式求解方法是一种真正的动态求解过程,它的最初发展是为了模拟高速冲击问题,在这类问题的求解中惯性发挥了主导性作用。
当求解动力平衡的状态时,非平衡力以应力波的形式在相邻的单元之间传播。
由于最小稳定时间增量一般地是非常小的值,所以大多少问题需要大量的时间增量步。
在求解准静态问题上,显式求解方法已经证明是有价值的,另外ABAQUS/Explicit在求解某些类型的静态问题方面比ABAQUS/Standard更容易。
在求解复杂的接触问题时,显式过程相对于隐式过程的一个优势是更加容易。
此外,当模型很大时,显式过程比隐式过程需要较少的系统资源。
将显式动态过程应用于准静态问题需要一些特殊的考虑。
根据定义,由于一个静态求解是一个长时间的求解过程,所以在其固有的时间尺度上分析模拟常常在计算上是不切合实际的,它将需要大量的小的时间增量。
因此,为了获得较经济的解答,必须采取一些方式来加速问题的模拟。
但是带来的问题是随着问题的加速,静态平衡的状态卷入了动态平衡的状态,在这里惯性力成为更加起主导作用的力。
准静态分析——ABAQUS/Explicit准静态过程(guasi-static process)在过程进行的每一瞬间,系统都接近于平衡状态,以致在任意选取的短时间dt内,状态参量在整个系统的各部分都有确定的值,整个过程可以看成是由一系列极接近平衡的状态所构成,这种过程称为准静态过程。
无限缓慢地压缩和无限缓慢地膨胀过程可近似看作为准静态过程。
准静态过程是一种理想过程,实际上是办不到的。
准静态原为一个热力学概念,在这里引用主要是指模型在加载的过程中任意时刻所经历的中间状态都可近似地视为静力状态,因此当加载过程进行得无限缓慢时,在各个时刻模型所处的状态就可近似地看作是静态,该过程便是准静态过程。
准静态啮合过程仿真主要考虑的是弧齿锥齿轮副在加载时的接触状态,以及齿面和齿根的应力变化规律,其前提是不考虑齿轮副惯性的影响。
ABAQUS/Explicit准静态分析显式求解方法是一种真正的动态求解过程,它的最初发展是为了模拟高速冲击问题,在这类问题的求解中惯性发挥了主导性作用。
当求解动力平衡的状态时,非平衡力以应力波的形式在相邻的单元之间传播。
由于最小稳定时间增量一般地是非常小的值,所以大多少问题需要大量的时间增量步。
在求解准静态问题上,显式求解方法已经证明是有价值的,另外ABAQUS/Explicit在求解某些类型的静态问题方面比ABAQUS/Standard更容易。
在求解复杂的接触问题时,显式过程相对于隐式过程的一个优势是更加容易。
此外,当模型很大时,显式过程比隐式过程需要较少的系统资源。
将显式动态过程应用于准静态问题需要一些特殊的考虑。
根据定义,由于一个静态求解是一个长时间的求解过程,所以在其固有的时间尺度上分析模拟常常在计算上是不切合实际的,它将需要大量的小的时间增量。
因此,为了获得较经济的解答,必须采取一些方式来加速问题的模拟。
但是带来的问题是随着问题的加速,静态平衡的状态卷入了动态平衡的状态,在这里惯性力成为更加起主导作用的力。
ABAQUS准静态分析
⽬录
1. 简介
显⽰动⼒学最初⽤于模拟⾼速碰撞的问题,⽤于求解结构的动⼒学响应,在求解的过程中,惯性⼒起到了决定性的作⽤。
⾮平衡⼒以应⼒波在相邻的单元进⾏传播,因此求解时稳态的时间增强通常会很⼩。
同时,利⽤显⽰动⼒学的⽅法也可以求解忽略惯性⼒的动⼒学问题,称之为准静态分析。
如果以⾃然时间计算,显⽰动⼒学计算很长的时间步时不切实际的,这个时候的准静态就是认为的提⾼加载的速度,同时加载的速度⼜不会引⼊过⼤的惯性⼒的效应。
在准静态分析中,最重要的就是进⾏载荷加速或者载荷等效。
2. 载荷定义
准静态分析中的载荷,仿真载荷速率要远远⼤于实际的载荷速率,但也不是越⼤越好,具体要遵循⼀下⽅法:
(1)对具有约束的零件进⾏模态分析,获取零件的⼀阶模态频率,如250Hz,对应的周期为0.004秒;
(2)仿真载荷速率为实际载荷速率(0.1)除上述周期时间,为0.1/0.004 = 25;
(3)材料的波速为5000m/s,加载是速率应⼩于材料中的应⼒波波速的1%,现任上述速度合理
(4)在载荷加载过程中,可以使⽤SMOOTH STEP进⾏加载,使载荷更加平顺。
3. 等效判定
上述载荷定义是否符合准静态分析的要求,可通过能量的⽅法进⾏判断,动能相对对于内能占很⼩的⼀部分,则认为合理。
PS:不知道⾃⼰理解的对不对。
准静态分析——ABAQUS/Explicit准静态过程(guasi-static process)在过程进行的每一瞬间,系统都接近于平衡状态,以致在任意选取的短时间dt内,状态参量在整个系统的各部分都有确定的值,整个过程可以看成是由一系列极接近平衡的状态所构成,这种过程称为准静态过程。
无限缓慢地压缩和无限缓慢地膨胀过程可近似看作为准静态过程。
准静态过程是一种理想过程,实际上是办不到的。
准静态原为一个热力学概念,在这里引用主要是指模型在加载的过程中任意时刻所经历的中间状态都可近似地视为静力状态,因此当加载过程进行得无限缓慢时,在各个时刻模型所处的状态就可近似地看作是静态,该过程便是准静态过程。
准静态啮合过程仿真主要考虑的是弧齿锥齿轮副在加载时的接触状态,以及齿面和齿根的应力变化规律,其前提是不考虑齿轮副惯性的影响。
ABAQUS/Explicit准静态分析显式求解方法是一种真正的动态求解过程,它的最初发展是为了模拟高速冲击问题,在这类问题的求解中惯性发挥了主导性作用。
当求解动力平衡的状态时,非平衡力以应力波的形式在相邻的单元之间传播。
由于最小稳定时间增量一般地是非常小的值,所以大多少问题需要大量的时间增量步。
在求解准静态问题上,显式求解方法已经证明是有价值的,另外ABAQUS/Explicit在求解某些类型的静态问题方面比ABAQUS/Standard更容易。
在求解复杂的接触问题时,显式过程相对于隐式过程的一个优势是更加容易。
此外,当模型很大时,显式过程比隐式过程需要较少的系统资源。
将显式动态过程应用于准静态问题需要一些特殊的考虑。
根据定义,由于一个静态求解是一个长时间的求解过程,所以在其固有的时间尺度上分析模拟常常在计算上是不切合实际的,它将需要大量的小的时间增量。
因此,为了获得较经济的解答,必须采取一些方式来加速问题的模拟。
但是带来的问题是随着问题的加速,静态平衡的状态卷入了动态平衡的状态,在这里惯性力成为更加起主导作用的力。
准静态分析——ABAQUS/Explicit准静态过程(guasi-static process )在过程进行的每一瞬间,系统都接近于平衡状态,以致在任意选取的短时间dt 内,状态参量在整个系统的各部分都有确定的值,整个过程可以看成是由一系列极接近平衡的状态所构成,这种过程称为准静态过程。
无限缓慢地压缩和无限缓慢地膨胀过程可近似看作为准静态过程。
准静态过程是一种理想过程,实际上是办不到的。
准静态原为一个热力学概念,在这里引用主要是指模型在加载的过程中任意时刻所经历的中间状态都可近似地视为静力状态,因此当加载过程进行得无限缓慢时,在各个时刻模型所处的状态就可近似地看作是静态,该过程便是准静态过程。
准静态啮合过程仿真主要考虑的是弧齿锥齿轮副在加载时的接触状态,以及齿面和齿根的应力变化规律,其前提是不考虑齿轮副惯性的影响。
ABAQUS/Explicit 准静态分析显式求解方法是一种真正的动态求解过程,它的最初发展是为了模拟高速冲击问题在这类问题的求解中惯性发挥了主导性作用。
当求解动力平衡的状态时,非平衡力以应力波的形式在相邻的单元之间传播。
由于最小稳定时间增量一般地是非常小的值,所以大多少问题需要大量的时间增量步。
在求解准静态问题上,显式求解方法已经证明是有价值的,另外ABAQUS/Explicit求解某些类型的静态问题方面比ABAQUS/Standard更容易。
在求解复杂的接触问题时,显式过程相对于隐式过程的一个优势是更加容易。
此外,当模型很大时,显式过程比隐式过程需要较少的系统资源。
将显式动态过程应用于准静态问题需要一些特殊的考虑。
根据定义,由于一个静态求解是一个长时间的求解过程,所以在其固有的时间尺度上分析模拟常常在计算上是不切合实际的,它将需要大量的小的时间增量。
因此,为了获得较经济的解答,必须采取一些方式来加速问题的模拟。
但是带来的问题是随着问题的加速,静态平衡的状态卷入了动态平衡的状态,在这里惯性力成为更加起主导作用的力。
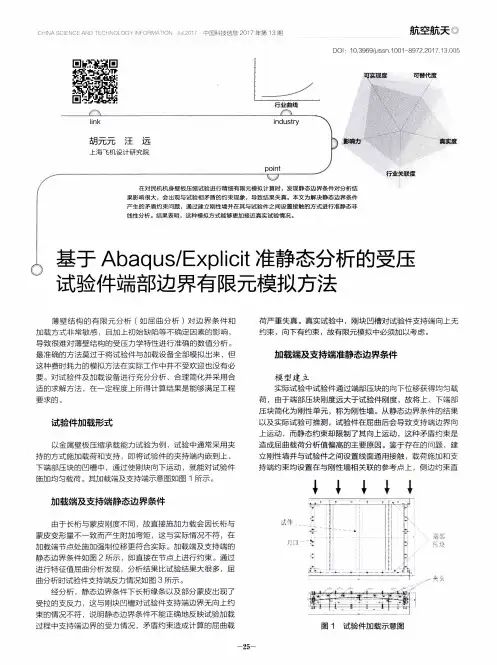
ABAQUS显式算法在准静态问题模拟的应用摘要:为了研究ABAQUS显式分析方法在准静态问题的适用性和准确性,本文通过使用ABAQUS显式分析方法对FRP-混凝土单剪试验进行数值模拟。
结果表明:数值模拟结果与试验结果相符,进而表明显式分析方法在处理准静态问题上具有适用性和准确性。
1.引言ABAQUS主要有两种求解模块[1]:ABAQUS/Standard和ABAQUS/Explicit,这两个模块均可进行准静态问题的模拟。
ABAQUS/Explicit显式求解方法是一个具有专门用途的分析求解模块,采用对时间变化的显式动力学有限积分,求解动力学方程。
其最初发展是为了模拟高速冲击问题,在这类问题的求解中,惯性发挥了主导性作用。
当求解动力平衡的状态时,非平衡力以应力波的形式在相邻的单元之间传播。
由于最小稳定时间增量一般是非常小的值,所以大多数问题需要大量的时间增量步。
该分析模块适用于求解分析复杂的接触问题、复杂的后屈服问题、材料退化以及高度非线性的准静态问题[2-4]。
在求解某些类型的准静态问题上,ABAQUS/Explicit求解方法比ABAQUS/Standard更容易收敛,同时占用相对较少的系统资源[5]。
基于此,本文对ABAQUS/Explicit显式算法的理论进行探讨,研究显式分析方法在准静态问题模拟方面的适用性和准确性。
2.算列分析本文将选取FRP-混凝土界面粘结单剪试验采用ABAQUS中的显式求解模块进行数值模拟,FRP-混凝土单剪试验是一个典型的准静态问题,通过使用显式分析方法模拟的结果与试验的结果进行对比,证明显式求解方法在分析准静态问题上的适用性和准确性。
有限元模型及网格划分如下图1所示。
模型中混凝土材料为C30,采用ABAQUS自带的混凝土损伤塑性模型[9]进行模拟。
混凝土单元和CFRP均采用八节点减缩积分实体单元C3D8R,混凝土与CFRP之间采用Tie绑定命令进行模拟,采用位移加载方式,加载速度为0.1mm/s。
abaqus系列教程-13-Explicit准静态分析13 ABAQUS/Explicit准静态分析显式求解方法是一种真正的动态求解过程,它的最初发展是为了模拟高速冲击问题,在这类问题的求解中惯性发挥了主导性作用。
当求解动力平衡的状态时,非平衡力以应力波的形式在相邻的单元之间传播。
由于最小稳定时间增量一般地是非常小的值,所以大多少问题需要大量的时间增量步。
在求解准静态问题上,显式求解方法已经证明是有价值的,另外ABAQUS/Explicit 在求解某些类型的静态问题方面比ABAQUS/Standard更容易。
在求解复杂的接触问题时,显式过程相对于隐式过程的一个优势是更加容易。
此外,当模型成为很大时,显式过程比隐式过程需要较少的系统资源。
关于隐式与显式过程的详细比较请参见第2.4节“隐式和显式过程的比较”。
将显式动态过程应用于准静态问题需要一些特殊的考虑。
根据定义,由于一个静态求解是一个长时间的求解过程,所以在其固有的时间尺度上分析模拟常常在计算上是不切合实际的,它将需要大量的小的时间增量。
因此,为了获得较经济的解答,必须采取一些方式来加速问题的模拟。
但是带来的问题是随着问题的加速,静态平衡的状态卷入了动态平衡的状态,在这里惯性力成为更加起主导作用的力。
目标是在保持惯性力的影响不显著的前提下用最短的时间进行模拟。
准静态(Quasi-static)分析也可以在ABAQUS/Standard中进行。
当惯性力可以忽略时,在ABAQUS/Standard中的准静态应力分析用来模拟含时间相关材料响应(蠕变、膨胀、粘弹性和双层粘塑性)的线性或非线性问题。
关于在ABAQUS/Standard中准静态分析的更多信息,请参阅ABAQUS分析用户手册(ABAQUS Analysis User’s Manual)的第6.2.5节“Quasi-static analysis”。
13.1 显式动态问题类比为了使你能够更直观地理解在缓慢、准静态加载情况和快速加载情况之间的区别,我们应用图13-1来类比说明。
基于 ABAQUS/Explicit 的深水连接器准静态分析赵三军;段梦兰;李旭东;刘亚磊;罗晓兰;代广文;李博【摘要】介绍了深水套筒式连接器的结构与工作原理。
建立了有限元模型,运用Abaqus/Explicit 显式准静态分析求解,从能量的角度判定模型分析的准确性,从计算结果判定该连接器的设计能否满足强度要求。
显式准静态分析求解既保证了数值计算的准确性,又解决了静态分析复杂接触时严重的不收敛问题,为解决复杂接触的静力问题提供了一种方法。
%The structure and working principle of deepwater collet connector is introduced.Finite element model is established,Abaqus/Explicit quasi-static analysis is used to solve the model,the accuracy of the model analysis from an energy point is determined and the design of the connector is determined if it can meet the strength requirements or not on the basis of calculation results. Quasi-static analysis could not only ensure the accuracy of numerical computation,but also solve serious non convergence problem of static analysis of complex contact,and provide a way to solve static problem of complex contact.【期刊名称】《石油矿场机械》【年(卷),期】2014(000)008【总页数】4页(P23-26)【关键词】水下生产系统;连接器;有限元法;准静态分析【作者】赵三军;段梦兰;李旭东;刘亚磊;罗晓兰;代广文;李博【作者单位】中国石油大学北京海洋油气研究中心,北京 102249;中国石油大学北京海洋油气研究中心,北京 102249;中国石油大学北京海洋油气研究中心,北京 102249;中国石油大学北京海洋油气研究中心,北京 102249;中国石油大学北京海洋油气研究中心,北京 102249;中国石油大学北京海洋油气研究中心,北京102249;中海油研究总院,北京 100027【正文语种】中文【中图分类】TE952深水区域的油气资源相对浅水区域丰富,人类开采的方向也从浅水逐渐深入到深水,而水下生产系统已成为重要的深水开发装备[1]。