测量内业计算资料汇编
- 格式:doc
- 大小:305.00 KB
- 文档页数:41
第三节 导线测量的内业计算导线测量内业计算的目的就是计算各导线点的平面坐标x 、y 。
计算之前,应先全面检查导线测量外业记录、数据是否齐全,有无记错、算错,成果是否符合精度要求,起算数据是否准确。
然后绘制计算略图,将各项数据注在图上的相应位置,如图6-11所示。
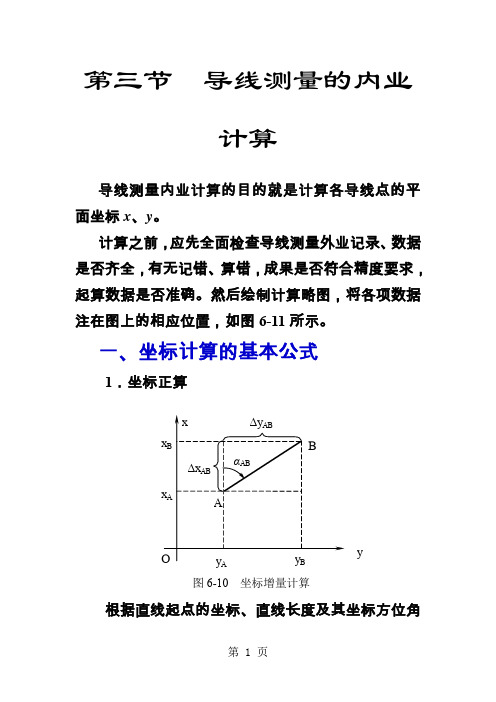
一、坐标计算的基本公式1.坐标正算根据直线起点的坐标、直线长度及其坐标方位角y图6-10 坐标增量计算计算直线终点的坐标,称为坐标正算。
如图6-10所示,已知直线AB 起点A 的坐标为(x A ,y A ),AB 边的边长及坐标方位角分别为D AB 和αAB ,需计算直线终点B 的坐标。
直线两端点A 、B 的坐标值之差,称为坐标增量,用Δx AB 、Δy AB 表示。
由图6-10可看出坐标增量的计算公式为:⎭⎬⎫=-=∆=-=∆AB AB A B ABAB AB A B AB D y y y D x x x ααsin cos(6-1)根据式(6-1)计算坐标增量时,sin 和cos 函数值随着α角所在象限而有正负之分,因此算得的坐标增量同样具有正、负号。
坐标增量正、负号的规律如表6-5所示。
表6-5 坐标增量正、负号的规律则B 点坐标的计算公式为:⎭⎬⎫+=∆+=+=∆+=AB AB A AB A B AB AB A AB A B D y y y y D x x x x ααsin cos(6-2)例6-1 已知AB 边的边长及坐标方位角为456380m 62.135'''︒==AB AB D α,,若A 点的坐标为m 82.658m 56.435==A A y x ,,试计算终点B 的坐标。
解 根据式(6-2)得 2.坐标反算根据直线起点和终点的坐标,计算直线的边长和坐标方位角,称为坐标反算。
如图6-10所示,已知直线AB 两端点的坐标分别为(x A ,y A )和(x B ,y B ),则直线边长D AB 和坐标方位角αAB 的计算公式为:22AB AB ABy x D ∆+∆= (6-3)AB ABAB x y ∆∆=arctanα (6-4)应该注意的是坐标方位角的角值范围在0˚~360˚间,而arctan 函数的角值范围在-90˚~+90˚间,两者是不一致的。
建筑测量基本计算2水准测量内业计算一、水准测量内业的方法:水准测量的内业即计算路线的高差闭合差,如其符合要求则予以调整,最终推算出待定点的高程。
1. 高差闭合差的计算与检核终端水准点的已知高程,和经水准路线观测、推算的高程之差值称为高差闭合差。
附合水准路线高差闭合差h f 为:h f =∑测h - (始终H H -) (2-8)闭合水准路线高差闭合差为: h f =∑测h(2-9)为了检查高差闭合差是否符合要求,还应计算高差闭合差的容许值(即其限差)。
一般水准测量该容许值规定为平地 容h f =L 40±mm山地 容h f =n 12±mm (2-11)式中,L ―水准路线全长,以km 为单位;n ―路线测站总数。
2.高差闭合差的调整若高差闭合差小于容许值,说明观测成果符合要求,但应进行调整。
方法是将高差闭合差反符号,按与测段的长度(平地)或测站数(山地)成正比,即依下式计算各测段的高差改正数,加入到测段的高差观测值中:⊿i h = -i hL Lf ⋅∑ (平地) ⊿i h = -i hn n f ⋅∑(山地) 式中, L ∑―路线总长;i L ―第i 测段长度 (km) (i =1、2、3...); n ∑―测站总数;i n ―第i 测段测站数。
3.计算待定点的高程将高差观测值加上改正数即得各测段改正后高差:h i 改=hi+⊿h i i =1,2,3,……据此,即可依次推算各待定点的高程。
如上所述,闭合水准路线的计算方法除高差闭合差的计算有所区别而外,其余与附合路线的计算完全相同。
二、举例1.附合水准路线算例下图1所示附合水准路线为例,已知水准点A 、B 和待定点1、2、3将整个路线分为四个测段。
图1 附合水准路线测量成果示意图1)将点名、各测段测站数、各测段的观测高差i h 、已知高程数填入表2-2内相应栏目2、3、4、7(如系平地测量,则将测站数栏改为公里数栏,填入各测段公里数;表内加粗字为已知数据)。
目录第一水准测量成果计算第二水平角竖直角观测手簿计算第三视距测量、方位角与象限角转换第四经纬导线内业计算第五交会内业计算第六四等水准测量内业计算高程误差配赋表(样表)高程误差配赋内业计算详解(1) 点号、距离、平均高差由实际测量得出。
(2) 计算高差闭合差)-(起终H H h f h -∑=根据附和水准路线的测站数及路线长度求出每公里测站数,以便确定采用平地或山地高差闭合差容许值的计算公式。
L n ∑∑/<16为平原闭合差高差闭合差的公式为在平原地区:Lmm f h 40±=在山地地区: n f h 12±=由于fh<fh 容说明观测精度符合观测精度要求,可以对高差闭合差进行调整。
如果fh>fh 容,说明观测成果不符合要求,必须重新测量。
(3) 调整高差闭合差高差闭合差调整的原则和方法,是按与测站数或测段长度成正比列的原则,将高差闭合差反号分配到各相应测段的高差上,的改正后高差,即:i h ih i L L f n n f ⨯-=⨯∑-=∑)/()/(i υυ或其中,υi-------------第i 测段的高差改正数,mm ∑n 、∑L----水准路线总测站数与总长度 niLi-----------第i 测段的测站数与测段长度 计算检核∑υi=hf第 3 页归零差Δ左= (7) Δ右= (8)第 4 页1. 2C盘左-盘右一般数据正确值只有秒。
2.以盘左为准3.方向值:(1)+(9)/2大于0度的为为减,小于零为加。
4.Δ左(10)—(11)Δ右(12)—(13)限差30″5.(4)+(5)+(6)=360º逆时针注记形式:α左=L— 90°α右270°—Rα=1/2(α左+α右)2.指标差:χ=1/2(R+L—360°)限差10″一,尺长改正钢尺量距尺长方程式:实 际 长 整尺尺长改正膨胀系数丈量时温度 鉴定时温度名义长(1)水平距离计算公式:δ++⨯=f L pfD式中:0100计为为视距加常数,仪器设表示,其值在设计中为为视距常数用δ+f K p f则视线水平时水平距离公式:KL D = (2)当视线水平时高差为 υ-=i h(3)当望远镜倾斜时水平距离和高差:第 9 页希望以上资料对你有所帮助,附励志名言3条:1、理想的路总是为有信心的人预备着。
第三节 导线测量的内业计算导线测量内业计算的目的就是计算各导线点的平面坐标x 、y 。
计算之前,应先全面检查导线测量外业记录、数据是否齐全,有无记错、算错,成果是否符合精度要求,起算数据是否准确。
然后绘制计算略图,将各项数据注在图上的相应位置,如图6-11所示。
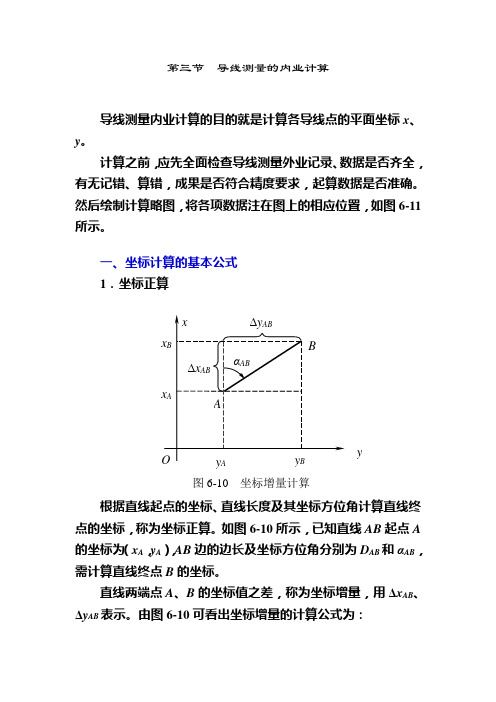
一、坐标计算的基本公式1.坐标正算根据直线起点的坐标、直线长度及其坐标方位角计算直线终点的坐标,称为坐标正算。
如图6-10所示,已知直线AB 起点A 的坐标为(x A ,y A ),AB 边的边长及坐标方位角分别为D AB 和αAB ,需计算直线终点B 的坐标。
直线两端点A 、B 的坐标值之差,称为坐标增量,用Δx AB 、Δy AB 表示。
由图6-10可看出坐标增量的计算公式为:y图6-10 坐标增量计算⎭⎬⎫=-=∆=-=∆AB AB A B AB AB AB A B AB D y y y D x x x ααsin cos (6-1)根据式(6-1)计算坐标增量时,sin 和cos 函数值随着α角所在象限而有正负之分,因此算得的坐标增量同样具有正、负号。
坐标增量正、负号的规律如表6-5所示。
表6-5 坐标增量正、负号的规律则B 点坐标的计算公式为:⎭⎬⎫+=∆+=+=∆+=AB AB A AB A B AB AB A AB A B D y y y y D x x x x ααsin cos(6-2)例6-1 已知AB 边的边长及坐标方位角为456380m 62.135'''︒==AB AB D α,,若A 点的坐标为m 82.658m 56.435==A A y x ,,试计算终点B 的坐标。
解 根据式(6-2)得6.792456380sin m 62.135m 82.658sin .457456380cos m 62.135m 56.435cos ='''︒⨯+=+=='''︒⨯+=+=AB AB A B AB AB A B D y y D x x αα2.坐标反算根据直线起点和终点的坐标,计算直线的边长和坐标方位角,称为坐标反算。
在地面上按一定的要求选定一系列的点(导线点),以折线的形式将它们连接起来则构成导线。
导线呈单线布设,坐标传递迅速,且只需前后两个相邻点通视即可进行观测,易于避开地形、地物障碍,布设形式十分灵活。
目前随着GPS和全站型电子速测仪的全面普及,导线测量已成为地面控制测量建网的主要方法,传统的地面控制测量——小三角测量几乎完全被GPS和EDM导线测量所取代。
CASIO-fx系列可编程计算器,作为内、外业计算工作的辅助设备。
具有体积小、重量轻、携带方便、多行显示、存贮量大、工作方便等特点,编制好测量程序后,计算器通过程序计算,不需要测量人员进行逐步计算,从而消除了人为输入误差。
而且计算器在计算时小数位数是自身进行取舍,所以它的精度可以得到保证,并且比人工逐步计算要高。
在导线控制测量中,将复杂的平差计算过程编成计算器程序,简化计算过程减轻测量人员的内业计算量。
内业计算时,只需按照提示输入相应观测值便可得到平差成果,并进行必要的精度评定,简单快捷比专业的平差软件更容易掌握。
二常用的导线布设形式目前全站仪在各生产单位已经越来越普及,高等级的全站仪测角、测距精度已经足够满足地面控制测量的要求。
另一方面导线选点自由度大,优点突出,并能一次性完成平面和高程控制测量,这使得导线测量已经逐步成为地面控制测量的主要方式。
在实际工作中导线布设主要采用以下三种形式。
1 闭合导线起止于同一已知点的导线,称为闭合导线。
导线从已知高级控制点和已知方向出发,经过中间未知导线点,最后回到起点,形成一闭合多边形。
闭合导线本来具有严密的几何条件,因此能起到检核观测成果的作用,通常用于首级控制。
2 附和导线布设在两已知控制点间的导线,称为附和导线。
导线从一已知控制点和已知方向出发,经过未知导线点,最后附和到另一已知控制点和已知方向。
这种布设形式,具有检核观测成果的作用,通常用于平面控制测量的加密。
3 支导线由一已知控制点和一已知方向出发,既不回到原点,也不附和到另一已知控制点上,这种导线称为支导线。

导线测量内业计算导线计算的目的是要计算出导线点的坐标,计算导线测量的精度是否满足要求。
首先要查实起算点的坐标、起始边的方位角,校核外业观测资料,确保外业资料的计算正确、合格无误。
一、坐标正算与坐标反算1、坐标正算已知点的坐标、边的方位角、两点间的水平距离,计算待定点的坐标,称为坐标正算。
如图6-6 所示,点的坐标可由下式计算:式中、为两导线点坐标之差,称为坐标增量,即:【例题6-1】已知点A坐标,=1000、=1000、方位角=35°17'36.5",两点水平距离=200.416,计算点的坐标?35o17'36.5"=1163.58035o17'36.5"=1115.7932、坐标反算已知两点的坐标,计算两点的水平距离与坐标方位角,称为坐标反算。
如图6-6可知,由下式计算水平距离与坐标方位角。
(6-3)(6-4)式中反正切函数的值域是-90°~+90°,而坐标方位角为0°~360°,因此坐标方位角的值,可根据、的正负号所在象限,将反正切角值换算为坐标方位角。
【例题6-2】=3712232.528、=523620.436、=3712227.860、=523611.598,计算坐标方位角计算坐标方位角、水平距离。
=62°09'29.4"+180°=242°09'29.4"注意:一直线有两个方向,存在两个方位角,式中:、的计算是过A点坐标纵轴至直线的坐标方位角,若所求坐标方位角为,则应是A点坐标减点坐标。
坐标正算与反算,可以利用普通科学电子计算器的极坐标和直角坐标相互转换功能计算,普通科学电子计算器的类型比较多,操作方法不相同,下面介绍一种方法。
【例题6-3】坐标反算,已知=2365.16、=1181.77、=1771.03、=1719.24,试计算坐标方位角、水平距离。
键入1771.03-2365.16按等号键[=]等于纵坐标增量,按储存键[],键入1719.24-1181.77按等号键[=]等于横坐标增量,按[]键输入,按[]显示横坐标增量,按[]键输入,按第二功能键[2ndF],再按[]键,屏显为距离,再按[]键,屏显为方位角。
第三节导线测量的内业计算导线测量内业计算的目的就是计算各导线点的平面坐标x、y。
计算之前,应先全面检查导线测量外业记录、数据是否齐全,有无记错、算错,成果是否符合精度要求,起算数据是否准确。
然后绘制计算略图,将各项数据注在图上的相应位置,如图6-11所示。
一、坐标计算的基本公式1.坐标正算根据直线起点的坐标、直线长度及其坐标方位角计算直线终点的坐标,称为坐标正算。
如图6-10所示,已知直线AB 起点A 的坐标为(x A ,y A ),AB 边的边长及坐标方位角分别为D AB 和αAB ,需计算直线终点B 的坐标。
直线两端点A 、B 的坐标值之差,称为坐标增量,用Δx AB 、Δy AB 表示。
由图6-10可看出坐标增量的计算公式为:x yx Ax By Ay B∆y AB∆x ABαABABO图6-10坐标增量计算⎭⎬⎫=-=∆=-=∆AB AB A B AB ABAB A B AB D y y y D x x x ααsin cos(6-1) 根据式(6-1)计算坐标增量时,sin 和cos 函数值随着α角所在象限而有正负之分,因此算得的坐标增量同样具有正、负号。
坐标增量正、负号的规律如表6-5所示。
表6-5 坐标增量正、负号的规律象限 坐标方位角α Δx Δy Ⅰ 0˚~90˚ + + Ⅱ 90˚~180˚ - + Ⅲ 180˚~270˚ - - Ⅳ270˚~360˚+-则B 点坐标的计算公式为:⎭⎬⎫+=∆+=+=∆+=AB AB A AB A B AB AB A AB A B D y y y y D x x x x ααsin cos(6-2)例6-1 已知AB 边的边长及坐标方位角为456380m 62.135'''︒==AB AB D α,,若A 点的坐标为m 82.658m 56.435==A A y x ,,试计算终点B 的坐标。
解 根据式(6-2)得m62.792456380sin m 62.135m 82.658sin m 68.457456380cos m 62.135m 56.435cos ='''︒⨯+=+=='''︒⨯+=+=ABAB A B AB AB A B D y y D x x αα2.坐标反算根据直线起点和终点的坐标,计算直线的边长和坐标方位角,称为坐标反算。
⽔准测量内业计算⽔准测量内业计算⼀、⽔准测量内业的⽅法:⽔准测量的内业即计算路线的⾼差闭合差,如其符合要求则予以调整,最终推算出待定点的⾼程。
1.⾼差闭合差的计算与检核附合⽔准路线⾼差闭合差为:=- () (2-8)闭合⽔准路线⾼差闭合差为:=(2-9)为了检查⾼差闭合差是否符合要求,还应计算⾼差闭合差的容许值(即其限差)。
⼀般⽔准测量该容许值规定为平地=mm⼭地=mm (2-11)式中,―⽔准路线全长,以km为单位;―路线测站总数。
2.⾼差闭合差的调整若⾼差闭合差⼩于容许值,说明观测成果符合要求,但应进⾏调整。
⽅法是将⾼差闭合差反符号,按与测段的长度(平地)或测站数(⼭地)成正⽐,即依下式计算各测段的⾼差改正数,加⼊到测段的⾼差观测值中:⊿= -(平地)⊿= - (⼭地)式中,―路线总长;―第测段长度 (km) (=1、2、3...);―测站总数;―第测段测站数。
3.计算待定点的⾼程将⾼差观测值加上改正数即得各测段改正后⾼差:h i改=hi+⊿h i i=1,2,3,……据此,即可依次推算各待定点的⾼程。
如上所述,闭合⽔准路线的计算⽅法除⾼差闭合差的计算有所区别⽽外,其余与附合路线的计算完全相同。
⼆、举例1.附合⽔准路线算例下图2-18所⽰附合⽔准路线为例,已知⽔准点A、B和待定点1、2、3将整个路线分为四个测段。
表2-2 附合⽔准路线计算测段号点名测站数观测⾼差/m改正数/m改正后⾼差/m⾼程/m 备注1 2 3 4 5 6 7 81 BM1 8+8.364 -0.014 +8.35039.8331 48.1832 3-1.433 -0.005 -1.4382 46.7453 4-2.745 -0.007 -2.7523 43.9934 5+4.661 -0.008 +4.653BM2 48.64620 + 8.847 -0.034 +8.813辅助=+ 0.034m计算== 54mm1)将点名、各测段测站数、各测段的观测⾼差、已知⾼程数填⼊表2-2内相应栏⽬2、3、4、7(如系平地测量,则将测站数栏改为公⾥数栏,填⼊各测段公⾥数;表内加粗字为已知数据)。
⽔准测量内业计算⽔准测量内业计算⼀、⽔准测量内业的⽅法:⽔准测量的内业即计算路线的⾼差闭合差,如其符合要求则予以调整,最终推算出待定点的⾼程。
1.⾼差闭合差的计算与检核终端⽔准点的已知⾼程,和经⽔准路线观测、推算的⾼程之差值称为⾼差闭合差。
附合⽔准路线⾼差闭合差h f 为:h f =∑测h - (始终H H -) (2-8)闭合⽔准路线⾼差闭合差为: h f =∑测h(2-9)为了检查⾼差闭合差是否符合要求,还应计算⾼差闭合差的容许值(即其限差)。
⼀般⽔准测量该容许值规定为平地容h f =L 40±mm⼭地容h f =n 12±mm (2-11)式中,L ―⽔准路线全长,以km 为单位;n ―路线测站总数。
2.⾼差闭合差的调整若⾼差闭合差⼩于容许值,说明观测成果符合要求,但应进⾏调整。
⽅法是将⾼差闭合差反符号,按与测段的长度(平地)或测站数(⼭地)成正⽐,即依下式计算各测段的⾼差改正数,加⼊到测段的⾼差观测值中:⊿i h = -i hL L f ?∑(平地) ⊿i h = -i hn nf ?∑ (⼭地) 式中, L ∑―路线总长;i L ―第i 测段长度 (km) (i =1、2、3...); n ∑―测站总数;i n ―第i 测段测站数。
3.计算待定点的⾼程将⾼差观测值加上改正数即得各测段改正后⾼差:h i 改=hi+⊿h i i =1,2,3,……据此,即可依次推算各待定点的⾼程。
如上所述,闭合⽔准路线的计算⽅法除⾼差闭合差的计算有所区别⽽外,其余与附合路线的计算完全相同。
⼆、举例1.附合⽔准路线算例下图1所⽰附合⽔准路线为例,已知⽔准点A 、B 和待定点1、2、3将整个路线分为四个测段。
图1 附合⽔准路线测量成果⽰意图1)将点名、各测段测站数、各测段的观测⾼差i h 、已知⾼程数填⼊表2-2内相应栏⽬2、3、4、7(如系平地测量,则将测站数栏改为公⾥数栏,填⼊各测段公⾥数;表内加粗字为已知数据)。
在地面上按一定的要求选定一系列的点(导线点),以折线的形式将它们连接起来则构成导线。
导线呈单线布设,坐标传递迅速,且只需前后两个相邻点通视即可进行观测,易于避开地形、地物障碍,布设形式十分灵活。
目前随着GPS和全站型电子速测仪的全面普及,导线测量已成为地面控制测量建网的主要方法,传统的地面控制测量——小三角测量几乎完全被GPS和EDM导线测量所取代。
CASIO-fx系列可编程计算器,作为内、外业计算工作的辅助设备。
具有体积小、重量轻、携带方便、多行显示、存贮量大、工作方便等特点,编制好测量程序后,计算器通过程序计算,不需要测量人员进行逐步计算,从而消除了人为输入误差。
而且计算器在计算时小数位数是自身进行取舍,所以它的精度可以得到保证,并且比人工逐步计算要高。
在导线控制测量中,将复杂的平差计算过程编成计算器程序,简化计算过程减轻测量人员的内业计算量。
内业计算时,只需按照提示输入相应观测值便可得到平差成果,并进行必要的精度评定,简单快捷比专业的平差软件更容易掌握。
二常用的导线布设形式目前全站仪在各生产单位已经越来越普及,高等级的全站仪测角、测距精度已经足够满足地面控制测量的要求。
另一方面导线选点自由度大,优点突出,并能一次性完成平面和高程控制测量,这使得导线测量已经逐步成为地面控制测量的主要方式。
在实际工作中导线布设主要采用以下三种形式。
1 闭合导线起止于同一已知点的导线,称为闭合导线。
导线从已知高级控制点和已知方向出发,经过中间未知导线点,最后回到起点,形成一闭合多边形。
闭合导线本来具有严密的几何条件,因此能起到检核观测成果的作用,通常用于首级控制。
2 附和导线布设在两已知控制点间的导线,称为附和导线。
导线从一已知控制点和已知方向出发,经过未知导线点,最后附和到另一已知控制点和已知方向。
这种布设形式,具有检核观测成果的作用,通常用于平面控制测量的加密。
3 支导线由一已知控制点和一已知方向出发,既不回到原点,也不附和到另一已知控制点上,这种导线称为支导线。
由于支导线缺乏检核条件,故其边数一般不超过四条,它仅适用于图根控制点加密。
但是在实际工作中,如隧洞贯通测量中,由于地形条件的限制必须采用此种布设形式,这时可考虑布设成双支导线的形式。
如图1 双支导线示意图所示。
将两条支导线的一点或几点重合,外业观测与闭合导线观测方法相同,在重合点上只需设站一次即可。
内业计算时可按两条支导线单独进行,也可按闭合导线的方法进行,比较重合点和终点的坐标值而得到检核。
三 CASIO-fx4800平差程序1 单一导线的严密平差程序1.1 程序清单<1>主程序名——DYPJN=B:L:M:K=206265:Q=M2÷(KL2:X:Y:F:D:E:A:V=0:W=0:Z=0:Defm 72:LbI 0:{S}:Z=Z+S:H=6N:Z[H]=S:Prog“FJ”:Z[H-1]=F:Dsz N:Goto 0:Prog“FJ”:“FW=”:F=F-A▲F=-F÷(B+1:N=B:L=0:M=0:O=0:P=0:R=0:S=0:LbI 1:L=L+1:H=6N: Rec(Z[H,LF+Z[H-1:Z[H-2]=I:V=V+I:R=R+V:M=M+I2÷Z[H:Z[H-3]=J:W=W+J:S=S+W:O= O+J2÷Z[H:P=P+IJ÷Z[H:Dsz N:Goto 1:A=X+V-D: C=Y+W-E:“J=” :T=Z÷√(A2+C2▲D=-R÷(B+1:E=-S÷(B+1:V=D:W=E:R=V2:S=W2:T=VW:N=B:LbI2:H=6N:V=V+Z[H-2:Z[H-4]=V:W=W+Z[H-3:Z[H-5]=W:R=R+V2: S=S+W2:T=T+VW: Dsz N:Goto 2:Z=Q÷K:M=M+ZS:O=O+ZR:P=P-ZT:N=MO-P2:K=(CP-AO)÷N:Z=(AP-CM)÷N:V=Q(EK-DZ)÷20G:S=(V+F)2:N=B:L=0:O=0:Lb I 3:H=6N:“N=”:L=L+1▲W=KZ[H-2]+ZZ[H-3:O=O+W2:“XN=”:X=X+Rec(W+Z[H,V+LF+ Z[H-1 ▲“YN=”:Y=Y+J▲P=Q(KZ[H-5]-ZZ[H-4])÷20G:V=V+P:S=S+(P+F)2:Dsz N:Goto 3: “M=” :M=√(S÷3▲“S=” :S=√(O÷3▲“END”<2>子程序名——FJG=180:{L}:F=F+L:F≤G=>F=F+G:≠>F=F-G△F≥2G=>F=F-2G△1.2 变量名称和存贮器内容B→导线的边数;L→测距中误差;M→测角中误差; X、Y→起始点的坐标;D、E→终点的坐标;F→起始边的方位角;A→终止边的方位角;FW→方位角闭合差;N→导线点计算编号;XN、YN→导线点平差后坐标;J→导线全长相对闭合差分母值;S→导线的边长和测距中误差1.3 程序功能及说明本程序按最小二乘法原理,对单一的附和(闭合)导线进行平差计算,并作精度评定,可作为水利水电工程三等及其以下导线的平差计算程序。
程序中Defm 命令后自变量系按12条边设置,若超过,可按其6倍数重新设置。
程序用于闭合导线时,外业工作时应观测连接角1和2,如图2 观测示意图所示,改成附和导线形式进行平差计算。
1.4 操作步骤和示例附和导线的观测、已知数据见表1,求解各导线点平差后的坐标,其具体操作步骤见表2。
表1 数据和图形测站水平角° ′ ″ 距离 (m)A 78°35′40″359.3021 173°25′36″212.2782 197°58′48″281.2693 195°11′19″301.9474 198°21′42″484.9695 92°35′09″521.213B 223°09′54″A X:2943.33 α1:216°22′17″Y:7531.52B X:2022.416 α2:115°40′57″Y:9136.327表2 具体操作步骤步骤按键显示步骤按键显示1 AC 开机26 SHIFT °′″ FW= -0°00′32″2 链接FILE DYPJ 27 EXE I? -151.66063 EXE B? ××× 28 EXE J? 325.72534 6EXE L? ××× 29 EXE J= 306885 0.005EXE M? ××× 30 EXE N= 16 5.0EXE X? ××× 31 EXE XN= 2791.67567 2943.330EXE Y? ××× 32 EXE YN= 7857.23088 7531.520EXE F? ××× 33 EXE N= 29 216°22′17″EXE D? ××× 34 EXE XN= 2724.690710 2022.416EXE E? ××× 35 EXE YN= 8058.651911 9136.327EXE A? ××× 36 EXE N= 312 115°40′57″EXE S? ××× 37 EXE XN= 2557.878613 359.302EXE L? ××× 38 E XE YN= 8285.104914 78°35′40″EXE S? 359.302 39 EXE N= 415 212.278EXE L? 78.5944 40 EXE XN= 2321.358016 173°25′36″EXE S? 212.278 41 EXE YN= 8472.795017 281.269EXE L? 173.4267 42 EXE N= 518 197°58′48″EXE S? 281.269 43 EXE XN= 1865.836919 301.947EXE L? 197.980 44 EXE YN= 8639.228320 195°11′19″EXE S? 301.947 45 EXE N= 621 484.969EXE L? 195.1886 46 EXE XN= 2022.416022 198°21′42″EXE S? 484.969 47 EXE YN= 9136.327023 521.213EXE L? 198.3617 48 EXE M= 0.001924 92°35′09″EXE L? 92.5858 49 EXE S= 0.024925 223°09′54″EXE FW= -0.0089 50 EXE END2 单一结点导线严密平差程序2.1 程序清单<1>主程序名——DJDPH=T:A=0:V=0:D=0:E=0:Q=0:LbI 0:Prog“DJ”:A=A+F:V=V+K: D=D+X:E=E+Y:Q=Q+M:Dsz H:Goto 0: “A=”:A=A÷V▲“D=”:D=D÷Q▲ “E=”:E=E÷Q▲LbI 1:{BLMXYFDEA}:Prog“DYPJ”:Dsz T:Goto 1:“END”<2>子程序名——DJ{BXYF}:Defm 12:N=B:Z=0:O=0:P=0:R=0:U=0: LbI 2:Prog“FJ”:{S}:Rec(S,F:Z=Z+S:O=O+I:Z[2N]=O:P=P+J:Z[2N-1]=P:R=R+O:U=U+P: Dsz N:Goto 2:Prog“FJ”:X=X+O:Y=Y+P:K=1÷(B+1:F=FK:R=RK:U=UK: N=B:O=0:P=0:LbI 3:I=R2:J=U2:O=Z[2N]-R:P=Z[2N-1]-U:I=I+O2: J=J+P2:Dsz N:Goto 3:M=ZC2+(I+J)M2÷2062652:X=X÷M:Y=Y÷M: M=1÷M<3>子程序名——FJ内容同单一导线严密平差程序子程序FJ相同<4>子程序名——DYPJ内容与单一导线严密平差程序主程序DYPJ相同2.2 变量名称和存贮器内容T→导线的条数;B→各条导线的边数; X、Y→各导线的起始点的坐标;F→各导线的起始方位角;L→导线的水平角;C→测距中误差;M→测角中误差;A→结边的方位角; D、E→结点的坐标;FW→方位角闭合差;N→导线点计算编号;XN、YN→导线点平差后坐标;J→导线全长相对闭合差的分母值;S→导线的边长和测距中误差2.3 程序功能及说明该程序按严密平差原理,解算单一结点导线的方位和坐标,与前述“单一导线的严密平差程序”联合在一起,能解算整个结点导线每点的坐标,并作精度评定,可作为水利水电工程三等及其以下单一结点导线网的平差计算程序。