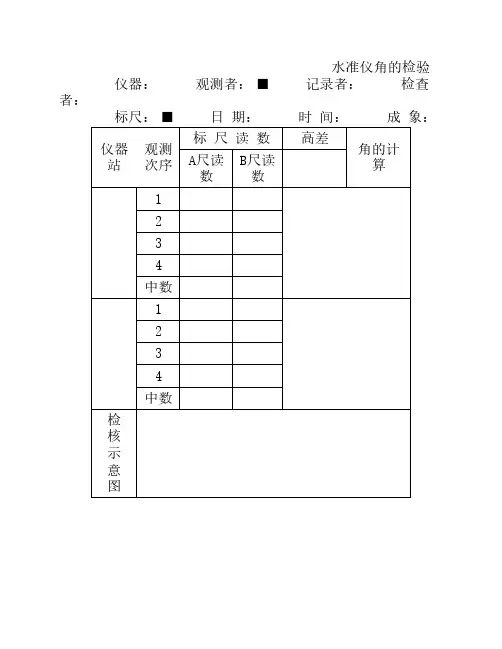
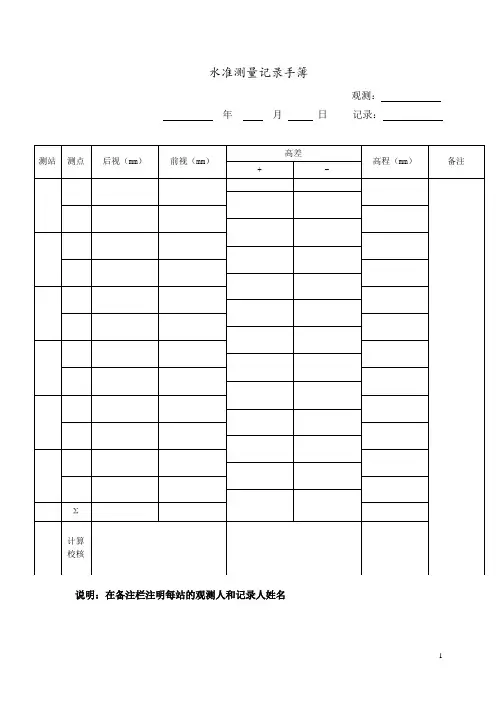
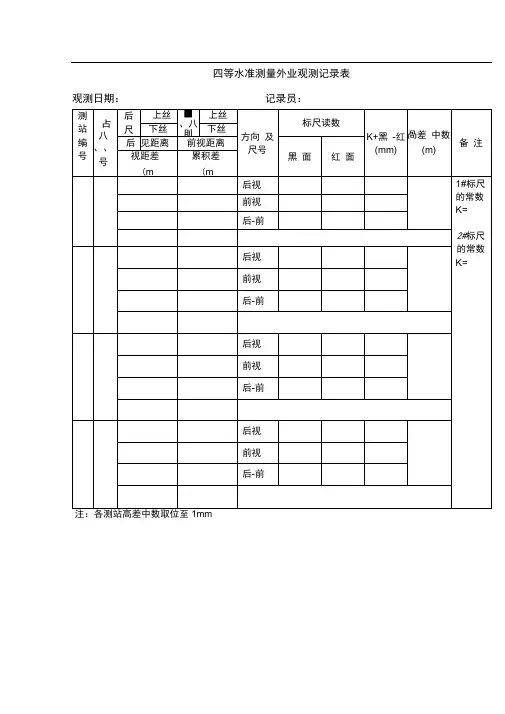
水准测量外业、内业记录计算表
- 格式:doc
- 大小:73.50 KB
- 文档页数:3

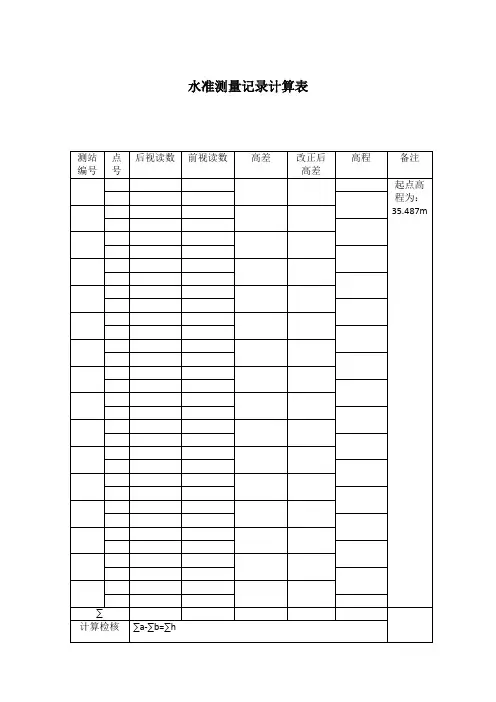
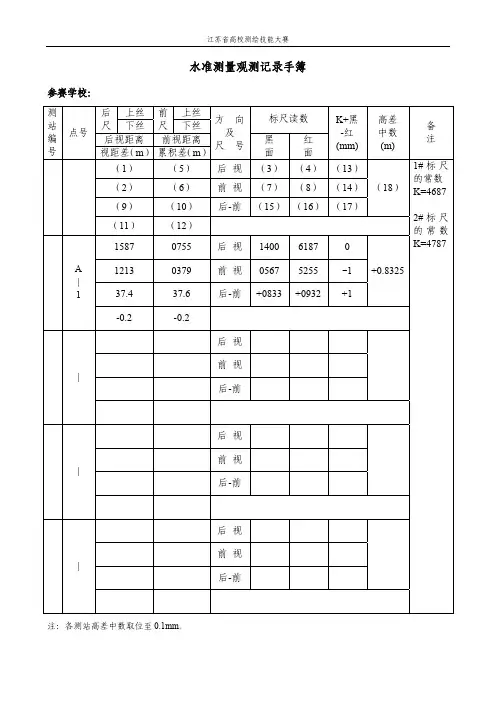
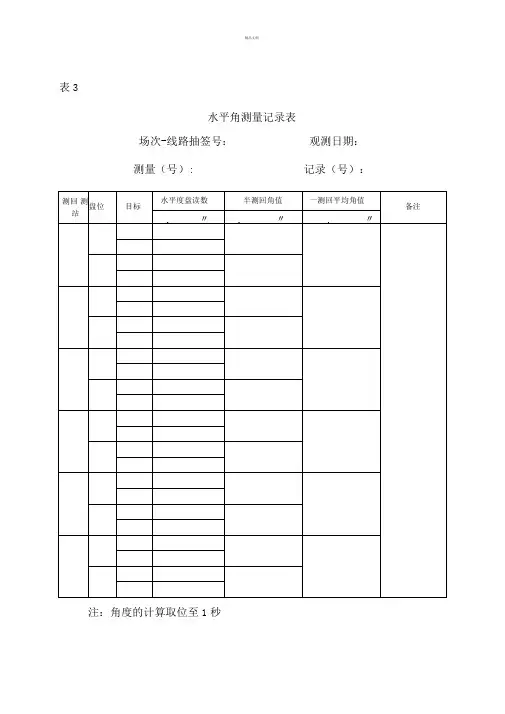
表3
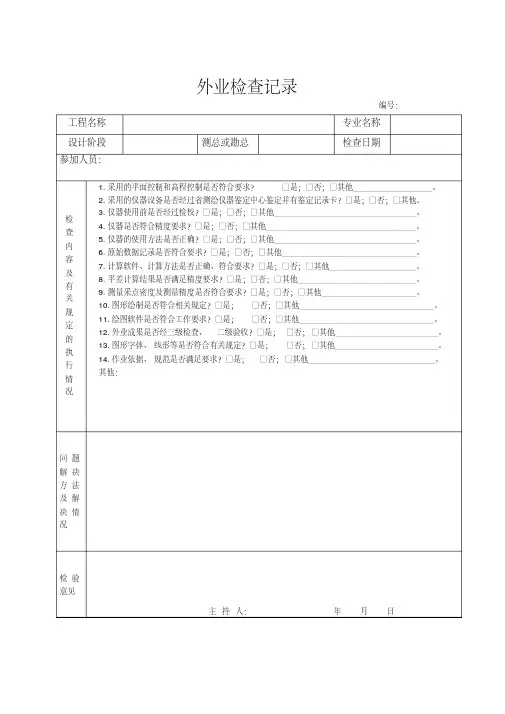
水平角测量记录表
场次-线路抽签号:观测日期:
测量(号): 记录(号):
注:角度的计算取位至1秒
观测日期: 记录(号):
距离测量记录表
场次-线路抽签号: 测量(号):
注: 距 离 平 均 值 的 计 算 取 位 至 1mm 。
精品文档
导线测量成果计算表
场次-线路抽签号: 计算者(号):计算日期:
注:角度及改正数的计算取位至 1秒,距离、坐标及相关改正数的计算取位至1mm
精品文档
精品文档
欢迎您的下载,
资料仅供参考!
致力为企业和个人提供合同协议,策划案计划书,学习资料等等
打造全网一站式需求。
导线测量的内业计算导线测量内业计算的目的就是计算各导线点的平面坐标x 、y 。
计算之前,应先全面检查导线测量外业记录、数据是否齐全,有无记错、算错,成果是否符合精度要求,起算数据是否准确。
然后绘制计算略图,将各项数据注在图上的相应位置,如图6-11所示。
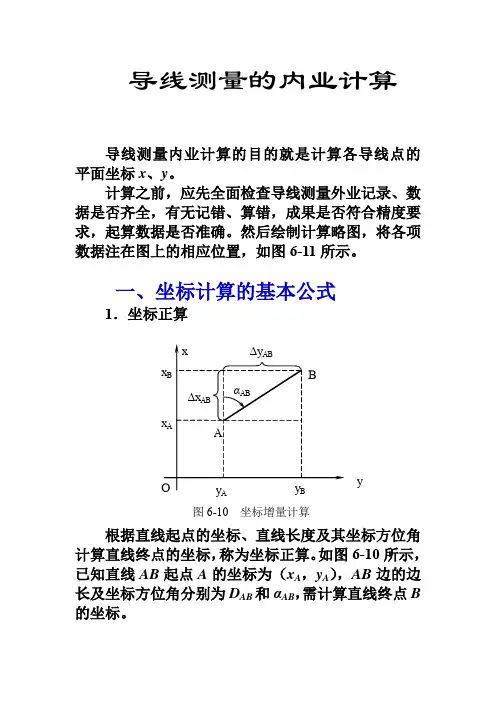
一、坐标计算的基本公式1.坐标正算根据直线起点的坐标、直线长度及其坐标方位角计算直线终点的坐标,称为坐标正算。
如图6-10所示,已知直线AB 起点A 的坐标为(x A ,y A ),AB 边的边长及坐标方位角分别为D AB 和αAB ,需计算直线终点B 的坐标。
y图6-10 坐标增量计算直线两端点A 、B 的坐标值之差,称为坐标增量,用Δx AB 、Δy AB 表示。
由图6-10可看出坐标增量的计算公式为:⎭⎬⎫=-=∆=-=∆AB AB A B AB AB AB A B AB D y y y D x x x ααsin cos(6-1)根据式(6-1)计算坐标增量时,sin 和cos 函数值随着α角所在象限而有正负之分,因此算得的坐标增量同样具有正、负号。
坐标增量正、负号的规律如表6-5所示。
表6-5 坐标增量正、负号的规律则B 点坐标的计算公式为:⎭⎬⎫+=∆+=+=∆+=AB AB A AB A B AB AB A AB A B D y y y y D x x x x ααsin cos(6-2)例6-1 已知AB 边的边长及坐标方位角为456380m 62.135'''︒==AB AB D α,,若A 点的坐标为m 82.658m 56.435==A A y x ,,试计算终点B 的坐标。
解 根据式(6-2)得6.792456380sin m 62.135m 82.658sin .457456380cos m 62.135m 56.435cos ='''︒⨯+=+=='''︒⨯+=+=AB AB A B AB AB A B D y y D x x αα2.坐标反算根据直线起点和终点的坐标,计算直线的边长和坐标方位角,称为坐标反算。
在地面上按一定的要求选定一系列的点(导线点),以折线的形式将它们连接起来则构成导线。
导线呈单线布设,坐标传递迅速,且只需前后两个相邻点通视即可进行观测,易于避开地形、地物障碍,布设形式十分灵活。
目前随着GPS和全站型电子速测仪的全面普及,导线测量已成为地面控制测量建网的主要方法,传统的地面控制测量——小三角测量几乎完全被GPS和EDM导线测量所取代。
CASIO-fx系列可编程计算器,作为内、外业计算工作的辅助设备。
具有体积小、重量轻、携带方便、多行显示、存贮量大、工作方便等特点,编制好测量程序后,计算器通过程序计算,不需要测量人员进行逐步计算,从而消除了人为输入误差。
而且计算器在计算时小数位数是自身进行取舍,所以它的精度可以得到保证,并且比人工逐步计算要高。
在导线控制测量中,将复杂的平差计算过程编成计算器程序,简化计算过程减轻测量人员的内业计算量。
内业计算时,只需按照提示输入相应观测值便可得到平差成果,并进行必要的精度评定,简单快捷比专业的平差软件更容易掌握。
二常用的导线布设形式目前全站仪在各生产单位已经越来越普及,高等级的全站仪测角、测距精度已经足够满足地面控制测量的要求。
另一方面导线选点自由度大,优点突出,并能一次性完成平面和高程控制测量,这使得导线测量已经逐步成为地面控制测量的主要方式。
在实际工作中导线布设主要采用以下三种形式。
1 闭合导线起止于同一已知点的导线,称为闭合导线。
导线从已知高级控制点和已知方向出发,经过中间未知导线点,最后回到起点,形成一闭合多边形。
闭合导线本来具有严密的几何条件,因此能起到检核观测成果的作用,通常用于首级控制。
2 附和导线布设在两已知控制点间的导线,称为附和导线。
导线从一已知控制点和已知方向出发,经过未知导线点,最后附和到另一已知控制点和已知方向。
这种布设形式,具有检核观测成果的作用,通常用于平面控制测量的加密。
3 支导线由一已知控制点和一已知方向出发,既不回到原点,也不附和到另一已知控制点上,这种导线称为支导线。
全站仪使用方法在这个日新月异的社会里,有许多的东西在被取代。
在老前辈的时候用作测量放线的是经纬仪,而经纬仪受地形的影响,地势变化大的地方用经纬放线很不方便。
因此在经纬仪的基础上聪明的人又发明了全站仪,它使前线的施工放线工作变的简单、快捷化。
而且无累积误差,是现施工放线中最常用的方法。
现西北项目部用的是拓普康GTS-332N电子全站仪,下面就以此型号的全站仪作一下简单的介绍。
仪器的各部分名称见说明书第10、11页。
先来介绍一下仪器的安置(仪器的整平与对中)1、安置三脚架:先将三脚架打开,伸到适当高度,拧紧三个固定螺旋。
2、将仪器安置到三脚架上:将仪器小心地置到三脚架上,拧紧中心连接螺旋。
3、仪器的对中(光学对中器):先用光学对中器粗略对中,具体方法如下:光学对中器的中心距测站点较远,则应移动三脚架,其方法是将一脚架固定住,移动另外两个脚架将其对准测站点,在此当中可利用人的脚来帮忙找点,这样会提高效率。
对中后将另外两个脚架也踩实,尤其是在地面较软的情况下这项工作尤为重要。
4、利用脚架的升降将圆水准气泡居中。
5、再一次用光学对中器对测站点:对中的目的是使仪器的中心与测站点位于同一铅垂线上。
轻轻松开中心螺旋至仪器可移动即可,将仪器轻轻移动至对中器对准测站点为止。
6、精确整平:整平的目的是使仪器的竖轴居于铅垂位置,从而使水平度盘水平。
整平时,先转动照准部平行于任意两个脚螺旋的连线,使两个脚螺旋作相对(或相反)转动,左手大拇指的运动方向即为气泡移动方向。
当气泡居中后,再将照准部平转90°,旋转另一个脚螺旋使气泡居中。
这一工作需反复多次,直至气泡在任何位置都居中为止。
(部分分仪器也可用电子气泡调平)7、仪器的照准:首先转动目镜使十字丝清晰,然后旋转照准部,使望远镜筒上的瞄准器照准目标,拧紧水平制动螺旋和竖直制动螺旋 ;再转动望远镜物镜调焦筒,使目标成像清晰;最后旋转水平和竖直微动螺旋,使十字丝精确照准目标,仔细消除视差。
1.水准路线高差闭合差的计算:f h= Σh测水准路线的成果检测:水准测量外业观测数据存在高差闭合差,高差闭合差需满足一定的限差,四等水准限差:fh允=±20√L L:水准路线全长,以KM为单位,不足1KM按1KM计算。
若高差闭合差超出此范围,表明成果中有错误存在,则要重返工作。
2.分配高差闭合差、检核测段高差改正数vi为:V i= - f hΣLL iΣ V i=-f h(检核)式中:ΣL——水准路线各测段的总长度,单位为km;L i——某一测段的长度,单位为km。
3.计算各测站改正后高差、检核h 改=h测+V iΣh改=0(检核)4.推算各待定点高程、检核H i=H i−1+h改H已知值=H推算值(检核)1.计算角度闭合差fβ:fβ= Σβ测- (n-2)×180°n:导线测量总测站数导线测量的成果检测:导线测量外业观测数据存在角度闭合差,角度闭合差需满足一定的限差,三级导线限差:fβ允=±24√n n:导线测量总测站数若角度闭合差超出此范围,表明成果中有错误存在,则要重返工作。
2.分配角度闭合差、检核测站角度改正数vi为(平均分配,大角多分、小角少分):V i= - fβnV =-fβ(检核)式中:n——测站数;3.计算各边方位角、检核α前= α后+β左±180°或α前= α后- β右±180°α已知方位角=α推算方位角(检核)4.计算坐标增量ΔX= D cosα f x= ΣΔXΔY= D sinαf y= ΣΔY或REC(距离,方位角) f= √ f x2+ f y2K =fΣD5.分配坐标增量、检核坐标增量改正数vi为:V x= - f xΣD L DΣ Vx改=-f x(检核)V y= - f yΣD L DΣ Vy改=-f y(检核)式中:ΣD——导线边长总长度,单位为m;L D——某一边长的长度,单位为m。