过程控制系统第五章 前馈控制系统
- 格式:ppt
- 大小:2.72 MB
- 文档页数:41

前馈控制一、前馈控制系统单回路控制系统和串级控制系统都是反馈控制系统,它主要是根据被控量和给定值的偏差信号来进行控制的。
反馈控制的最大优点是可以克服所有引起被控量发生变化的扰动信号,但它本身也存在很大的缺点,那就是调节不及时,调节总是滞后于扰动,即只有扰动作用于系统引起被控量发生变化,导致调节器输入端的偏差信号发生变化后,调节器才改变输出的调节信号,克服扰动,对被控量进行调节。
与反馈控制相比较,前馈控制直接根据扰动信号对被控量进行调节,调节快速性很好。
1.前馈控制的基本概念前馈控制也称为扰动补偿控制,是指在控制系统中,控制器根据扰动信号作用的大小和方向对被控量进行调节,称这种控制为前馈控制。
2.概念的理解(1)在前馈控制系统中,送给控制器的测量信号是扰动信号,而不是被控量,这和反馈控制存在很大的差别。
反馈控制是将被控量作为测量信号,调节器是根据被控量的测量值与给定值的偏差对被控量进行调节;而前馈控制是直接根据某个扰动信号的变化来对被控量进行调节的。
(2)前馈控制系统中的控制器通常叫做前馈控制器,或者前馈补偿器,该控制器只接收某个扰动作用的测量信号,无给定值输入信号。
因而从严格意义上讲,它不是一个控制器,而是一个补偿器,其作用是补偿扰动信号对被控量所造成的影响。
(3)一个前馈控制器只能对某一个扰动信号进行补偿。
若系统中存在多个扰动信号,则需要设计多个前馈控制器,分别去对多个扰动信号进行补偿。
3.前馈控制系统的结构前馈控制系统主要由前馈控制器、测量变送器、执行器、调节机构和被控对象组成。
其中,测量变送器是对扰动信号进行测量,而前馈控制器的输入信号只有一个,即扰动量的测量信号,无被控量的定值输入信号。
因而前馈控制器实际是一个前馈补偿器,补偿扰动对被控量的影响。
下面结合实例进行分析。
图3-10是一混合水温前馈控制系统示意图。
通过冷水调节阀和热水调节阀分别去调节冷水流量和热水流量,混合水的温度θ是系统的被控参数,要求θ为一定值。

第五章 前馈控制系统 5.1 前馈控制系统的特点产生前馈控制的背景:有些生产过程中采用常规反馈控制系统无法满足工艺的要求。
(a)反馈控制 (b)前馈控制前馈控制系统的补偿过程前馈控制理论基础是“不变性原理”或“干扰补偿理论”。
G PD (s)、G PC (s)分别为对象干扰通道与控制通道的传递函数。
系统对干扰F 实现完全补偿的条件:把上式代人(5-1),可得前馈控制器得传递函数:F前馈控制方框图)()()()()(S G S G S G S F S PC ff PD +=Θ)()()(0)(,0)(S G S G S G S S F PC PD ff -=≡Θ≠(5-1)(5-3)(5-2)从(5-3)可以看出,前馈控制器的控制规律为对象的干扰通道与控制通道的特性之比,式中的“负”号表示控制作用与干扰作用的方向相反。
前馈控制特点:1、前馈控制按干扰作用的大小进行控制,比反馈控制要及时。
2、前馈控制属于开环控制。
3、前馈控制器是视对象特性而定的“专用”控制器。
4、一种前馈控制只能控制一种干扰。
5.2 前馈控制系统的几种主要结构形式(1)动态前馈控制如下图所示换热器前馈控制系统即为单纯的动态前馈控制。
作用:通过合适的前馈控制规律的选择,使干扰经过前馈控制器至被控变量这一通道的动态前馈控制器得传递函数:(2)静态前馈控制定义:前馈控制器的输出M ff 仅仅是输入量的函数,而与时间因子t 无关,称为静态前馈控制。
适用范围:一般对于补偿要求不高或干扰通道与控制通道的动态响应相近,均可采用静态前馈控制。
对于一些较简单的对象,有条件列写有关参数的静态方程时,则可按照方程求得静态前馈控制方案。
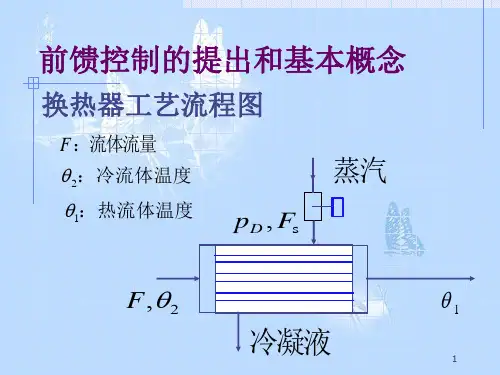
例如:如图所示,换热器温度控制系统中,主物料流量F 与进料量温度θ为主要干扰,忽略热损失。
则热量平衡式为:C p —物料的比热容F )()()(SG S G S G PC PD ff -=SS p hF c F ⋅=-⋅)(21θθh s —蒸气的汽化潜热由上式可求得,静态前馈控制方程式为:静态前馈控制流程原理图5.2.2 前馈-反馈控制系统单纯前馈控制的存在问题:(1)单纯前馈不存在被控变量的反馈,补偿效果没有检验的手段,前馈作用并没有最后消除偏差时,系统无法得知这一信息而作进一步的校正。