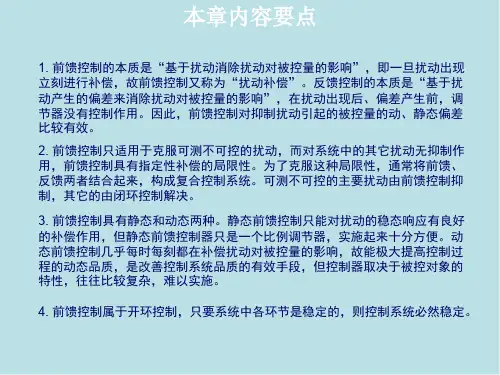
扰一出现,前馈控制器就根据检测到的干扰,按 一定规律进行控制。当干扰发生后,被控变量还 未发生变化,前馈控制器就产生了控制作用把偏 差彻底消除。
前馈控制与反馈控制的比较
前馈控制
相关干扰可测量 基于干扰操作 操作变量
开环,无稳定性问题
只有部分干扰可检测
控制通道与相关干扰通道的精确 数学模型均需要获得
前馈控制的理论基础
不变性原理是前馈控制的理论基础。“不变性 ”是指控制系统的被控变量不受扰动变量变化的影 响。进入控制系统中的扰动会通过被控对象的内部 关联,使被控变量发生偏离其设定值的变化。不变 性原理是通过前馈控制器的校正作用,消除扰动对 被控变量的这种影响。
有以下几种类型的不变性: (1)绝对不变性 指在扰动的作用下被控变 量在整个过程中始终保持不变; (2)误差不变性 指在扰动的作用下被控变量 的波动小于一个很小值; (3)稳态不变性 系统在稳态工况下被控变 量与扰动无关; (4)选择不变性 被控变量往往受到若干个 干扰的影响,若系统对其中几个主要的干扰实现不 变性补偿,就称为选择不变性。
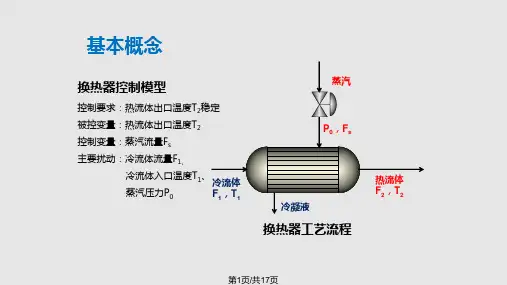
TT 11
T2
工艺 介质
反馈控制方案
T2sp
PV
FFC
T1m
RFm
TT
FT
12
31
u RV
蒸汽
T1
RF
换热器
凝液
T2
工艺 介质
前馈控制方案
前馈控制的一般概念
ysp u(t)
前馈控制器
D1(t) Dn(t)
...
D1(t), …, Dn(t) 表示某些 可测量、且对被控变量 CV影响显著的干扰
被控 过程
测量单元
前馈控制器
GDM (s)