FANUC-G代码加工中心数控指令
- 格式:docx
- 大小:22.04 KB
- 文档页数:3
FANUC铣床编程--G 代码命令一、G 代码组及其含义“模态代码” 的功能在它被执行后会继续维持,而“一般代码” 仅仅在收到该命令时起作用。
定义移动的代码通常是“模态代码”,像直线、圆弧和循环代码。
反之,像原点返回代码就叫“一般代码”。
每一个代码都归属其各自的代码组。
在“模态代码”里,当前的代码会被加载的同组代码替换。
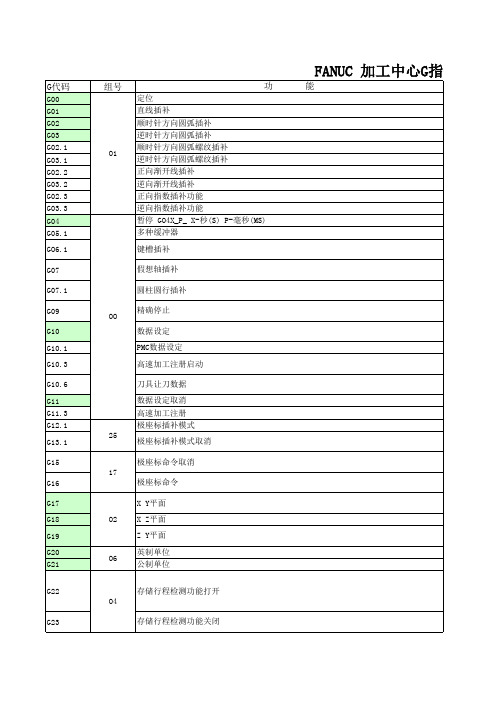
[表5.2-1] G 代码组及解释( 带* 者表示是开机时会初始化的代码。
)2 G 代码解释(1)快速定位(G00)1. 格式G00 X__Y__Z__这个命令把刀具从当前位置移动到命令指定的位置(在绝对坐标方式下),或者移动到某个距离处(在增量坐标方式下)。
2. 非直线切削形式的定位我们的定义是:采用独立的快速移动速率来决定每一个轴的位置。
刀具路径不是直线,根据到达的顺序,机器轴依次停止在命令指定的位置。
3. 直线定位刀具路径类似直线切削(G01) 那样,以最短的时间(不超过每一个轴快速移动速率)定位于要求的位置。
图5.2-14. 举例N10 G00 X-100. Y-100. Z65.(2)直线切削进给(G01)1. 格式这个命令将刀具以直线形式,按F代码指定的速率,从它的当前位置移动到程序要求的位置。
F 的速率是程序中指定轴速率的复合速率。
图5.2-22. 举例G01 G90 X-50. F100;或G01 G91 X30. F100;G01 G90 X-50. Y30. F100;或G01 G91 X30. Y15. Z0 F100;G01 G90 X-50. Y30. Z15. F100;(3)圆弧切削(G02/G03 G17/G18/G19)1. 格式圆弧所在的平面用G17, G18 和G19 指令来指定。
但是,只要已经在先前的程序块里定义了这些命令,也能够省略。
圆弧的回转方向像下图表示那样,由G02/G03 来指定。
在圆弧回转方向指定后,指派切削终点坐标。
G90 是指定在绝对坐标方式下使用此命令;而G91是在指定在增量坐标方式下使用此命令。

Fanuc数控车床G代码及M指令一、G 代码命令1、代码组及其含义“模态代码” 和“一般” 代码“形式代码” 的功能在它被执行后会继续维持,而“一般代码” 仅仅在收到该命令时起作用。
定义移动的代码通常是“模态代码”,像直线、圆弧和循环代码。
反之,像原点返回代码就叫“一般代码”。
每一个代码都归属其各自的代码组。
在“模态代码”里,当前的代码会被加载的同G71 内外径粗切循环G72 台阶粗切循环G73 成形重复循环G74 Z 向步进钻削G75 X 向切槽G76 切螺纹循环G9001 (内外直径)切削循环G92 切螺纹循环G94 (台阶) 切削循环G9612 恒线速度控制G97 恒线速度控制取消G98 10 固定循环返回起始点2、代码解释:G00 定位1. 格式G00 X_ Z_这个命令把刀具从当前位置移动到命令指定的位置 (在绝对坐标方式下),或者移动到某个距离处 (在增量坐标方式下)。
2. 非直线切削形式的定位我们的定义是:采用独立的快速移动速率来决定每一个轴的位置。
刀具路径不是直线,根据到达的顺序,机器轴依次停止在命令指定的位置。
3. 直线定位刀具路径类似直线切削(G01) 那样,以最短的时间(不超过每一个轴快速移动速率)定位于要求的位置。
4. 举例N10 G0 X100 Z65G01 直线插补1. 格式G01 X(U)_ Z(W)_ F_ ;直线插补以直线方式和命令给定的移动速率从当前位置移动到命令位置。
X, Z: 要求移动到的位置的绝对坐标值。
U,W: 要求移动到的位置的增量坐标值。
2. 举例①绝对坐标程序G01 X50. Z75. F0.2 ;X100.;②增量坐标程序G01 U0.0 W-75. F0.2 ;U50.G02/G03 圆弧插补 (G02, G03)1. 格式G02(G03) X(U)__Z(W)__I__K__F__ ;G02(G03) X(U)__Z(W)__R__F__ ;G02 –顺时钟 (CW) 凹圆G03 –逆时钟 (CCW) 凸圆X, Z –在坐标系里的终点U, W –起点与终点之间的距离I, K –从起点到中心点的矢量 (半径值)R –圆弧范围 (最大180 度)。
数控加工中心FANUC系统G代的详细知料z代表轴向坐标,X代表水平方向,Y代表垂直方向;1、G00与G01G00运动轨迹有直线和折线两种,该指令只是用于点定位,不能用于切削加工G01按指定进给速度以直线运动方式运动到指令指定的目标点,一般用于切削加工2、G02与G03G02:顺时针圆弧插补G03:逆时针圆弧插补3、G04(延时或暂停指令)一般用于正反转切换、加工盲孔、阶梯孔、车削切槽4、G17、G18、G19 平面选择指令,指定平面加工,一般用于铣床和加工中心G17:X-Y平面,可省略,也可以是与X-Y平面相平行的平面G18:X-Z平面或与之平行的平面,数控车床中只有X-Z平面,不用专门指定G19:Y-Z平面或与之平行的平面5、G27、G28、G29 参考点指令G27:返回参考点,检查、确认参考点位置G28:自动返回参考点(经过中间点)G29:从参考点返回,与G28配合使用6、G40、G41、G42 半径补偿G40:取消刀具半径补偿先给这么多,晚上整理好了再给7、G43、G44、G49 长度补偿G43:长度正补偿G44:长度负补偿G49:取消刀具长度补偿8、G32、G92、G76G32:螺纹切削G92:螺纹切削固定循环G76:螺纹切削复合循环9、车削加工:G70、G71、72、G73G71:轴向粗车复合循环指令G70:精加工复合循环G72:端面车削,径向粗车循环G73:仿形粗车循环10、铣床、加工中心:G73:高速深孔啄钻G83:深孔啄钻G81:钻孔循环G82:深孔钻削循环G74:左旋螺纹加工G84:右旋螺纹加工G76:精镗孔循环G86:镗孔加工循环G85:铰孔G80:取消循环指令11、编程方式G90、G91G90:绝对坐标编程G91:增量坐标编程12、主轴设定指令G50:主轴最高转速的设定G96:恒线速度控制G97:主轴转速控制(取消恒线速度控制指令)G99:返回到R点(中间孔)G98:返回到参考点(最后孔)13、主轴正反转停止指令M03、M04、M05M03:主轴正传M04:主轴反转M05:主轴停止14、切削液开关M07、M08、M09M07:雾状切削液开M08:液状切削液开M09:切削液关15、运动停止M00、M01、M02、M30M00:程序暂停M01:计划停止M02:机床复位M30:程序结束,指针返回到开头16、M98:调用子程序17、M99:返回主程序。

Fanuc数控车床G代码与M指令Fanuc数控车床G代码及M指令⼀、G 代码命令1、代码组及其含义“模态代码”和“⼀般”代码“形式代码”的功能在它被执⾏后会继续维持,⽽“⼀般代码”仅仅在收到该命令时起作⽤。
定义移动的代码通常是“模态代码”,像直线、圆弧和循环代码。
反之,像原点返回代码就叫“⼀般代码”。
每⼀个代码都归属其各⾃的代码组。
在“模态代码”⾥,当前的代码会被加载的同组代码替换。
2、代码解释:G00 定位1. 格式G00 X_ Z_这个命令把⼑具从当前位置移动到命令指定的位置(在绝对坐标⽅式下),或者移动到某个距离处(在增量坐标⽅式下)。
2. ⾮直线切削形式的定位我们的定义是:采⽤独⽴的快速移动速率来决定每⼀个轴的位置。
⼑具路径不是直线,根据到达的顺序,机器轴依次停⽌在命令指定的位置。
3. 直线定位⼑具路径类似直线切削(G01) 那样,以最短的时间(不超过每⼀个轴快速移动速率)定位于要求的位置。
4. 举例N10 G0 X100 Z65G01 直线插补1. 格式G01 X(U)_ Z(W)_ F_ ;直线插补以直线⽅式和命令给定的移动速率从当前位置移动到命令位置。
X, Z: 要求移动到的位置的绝对坐标值。
U,W: 要求移动到的位置的增量坐标值。
2. 举例①绝对坐标程序G01 X50. Z75. F0.2 ;X100.;②增量坐标程序G01 U0.0 W-75. F0.2 ;U50.G02/G03 圆弧插补(G02, G03)1. 格式G02(G03) X(U)__Z(W)__I__K__F__ ;G02(G03) X(U)__Z(W)__R__F__ ;G02 –顺时钟(CW) 凹圆G03 –逆时钟(CCW) 凸圆X, Z –在坐标系⾥的终点U, W –起点与终点之间的距离I, K –从起点到中⼼点的⽮量(半径值) R –圆弧范围(最⼤180 度)。
2. 举例①绝对坐标系程序G02 X100. Z90. I50. K0. F0.2或G02 X100. Z90. R50. F02;②增量坐标系程序G02 U20. W-30. I50. K0. F0.2;或G02 U20. W-30. R50. F0.2;G30 第⼆原点返回(G30)坐标系能够⽤第⼆原点功能来设置。
FANUC_铣床编程--G_代码命令使用实例[资料] FANUC 铣床编程--G 代码命令1 G 代码组及其含义“模态代码” 的功能在它被执行后会继续维持,而“一般代码” 仅仅在收到该命令时起作用。
定义移动的代码通常是“模态代码”,像直线、圆弧和循环代码。
反之,像原点返回代码就叫“一般代码”。
每一个代码都归属其各自的代码组。
在“模态代码”里,当前的代码会被加载的同组代码替换。
[表 5.2-1] G 代码组及解释( 带 * 者表示是开机时会初始化的代码。
) 2 G 代码解释快速定位(G00)1. 格式这个命令把刀具从当前位置移动到命令指定的位置 (在绝对坐标方式下),或者移动到某个距离处 (在增量坐标方式下)。
2. 非直线切削形式的定位我们的定义是:采用独立的快速移动速率来决定每一个轴的位置。
刀具路径不是直线,根据到达的顺序,机器轴依次停止在命令指定的位置。
3. 直线定位刀具路径类似直线切削(G01) 那样,以最短的时间(不超过每一个轴快速移动速率)定位于要求的位置。
图5.2-14. 举例N10 G00 X-100 Y-100 Z65直线切削进给(G01)1. 格式这个命令将刀具以直线形式,按,代码指定的速率,从它的当前位置移动到程序要求的位置。
F 的速率是程序中指定轴速率的复合速率。
图5.2-2 2. 举例G01 G90 X-50. F100;或G01 G91 X30. F100;G01 G90 X-50. Y30. F100;或G01 G91 X30. Y15. Z0 F100;G01 G90 X-50. Y30. Z15. F100;圆弧切削 (G02/G03 G17/G18/G19)1. 格式圆弧所在的平面用G17, G18 和G19 指令来指定。
但是,只要已经在先前的程序块里定义了这些命令,也能够省略。
圆弧的回转方向像下图表示那样,由G02/G03 来指定。
在圆弧回转方向指定后,指派切削终点坐标。
Fanuc数控车床G代码及M指令一、G 代码命令1、代码组及其含义“模态代码” 和“一般” 代码“形式代码” 的功能在它被执行后会继续维持,而“一般代码” 仅仅在收到该命令时起作用。
定义移动的代码通常是“模态代码”,像直线、圆弧和循环代码。
反之,像原点返回代码就叫“一般代码”。
每一个代码都归属其各自的代码组。
在“模态代码”里,当前的代码会被加载的同G7000精加工循环G71 内外径粗切循环G72 台阶粗切循环G73 成形重复循环G74 Z 向步进钻削G75 X 向切槽G76 切螺纹循环G9001(内外直径)切削循环G92 切螺纹循环G94 (台阶) 切削循环G9612恒线速度控制G97 恒线速度控制取消G98 10 固定循环返回起始点G00 定位1. 格式G00 X_ Z_这个命令把刀具从当前位置移动到命令指定的位置 (在绝对坐标方式下),或者移动到某个距离处 (在增量坐标方式下)。
2. 非直线切削形式的定位我们的定义是:采用独立的快速移动速率来决定每一个轴的位置。
刀具路径不是直线,根据到达的顺序,机器轴依次停止在命令指定的位置。
3. 直线定位刀具路径类似直线切削(G01) 那样,以最短的时间(不超过每一个轴快速移动速率)定位于要求的位置。
4. 举例N10 G0 X100 Z65G01 直线插补1. 格式G01 X(U)_ Z(W)_ F_ ;直线插补以直线方式和命令给定的移动速率从当前位置移动到命令位置。
X, Z: 要求移动到的位置的绝对坐标值。
U,W: 要求移动到的位置的增量坐标值。
2. 举例①绝对坐标程序G01 X50. Z75. F0.2 ;X100.;②增量坐标程序G01 U0.0 W-75. F0.2 ;U50.G02/G03 圆弧插补 (G02, G03)1. 格式G02(G03) X(U)__Z(W)__I__K__F__ ;G02(G03) X(U)__Z(W)__R__F__ ;G02 –顺时钟 (CW) 凹圆G03 –逆时钟 (CCW) 凸圆X, Z –在坐标系里的终点U, W –起点与终点之间的距离I, K –从起点到中心点的矢量 (半径值)R –圆弧范围 (最大180 度)。
FANUC 车床编程--G 代码命令1 G 代码组及含义[表 6.2-1] G 代码组及解释( 带 * 者表示是开机时会初始化的代码。
)2 G 代码解释定位(G00)1. 格式这个指令把刀具从当前位置移动到指令指定的位置 (在绝对坐标方式下),或者移动到某个距离处 (在增量坐标方式下)。
图6.2-12. 非直线切削形式的定位我们的定义是:采用独立的快速移动速率来决定每一个轴的位置。
刀具路径不是直线,根据到达的顺序,机器轴依次停止在指令指定的位置。
3. 直线定位刀具路径类似直线切削(G01)那样,以最短的时间(不超过每一个轴快速移动速率)定位于要求的位置。
4. 举例N10 G00 X-100 Z-65直线插补(G01)1. 格式直线插补以直线方式和指令给定的移动速率,从当前位置移动到指令位置。
图6.2-2X, Z: 要求移动到的位置的绝对坐标值。
U, W: 要求移动到的位置的增量坐标值。
2. 举例图6.2-3①G01 X50. Z75. F0.2 ;绝对坐标程序X100.;②G01 U0.0 W-75. F0.2 ;增量坐标程序U50.圆弧插补 (G02/G03)刀具进行圆弧插补时,必须规定所在的平面,然后再确定回转方向。
顺时针G02;逆时针G03。
1. 格式X,Z –指定的终点U,W –起点与终点之间的距离I,K –从起点到中心点的矢量R –圆弧半径(最大180 度)。
图6.2-42. 举例图6.2-5①G02 X100. Z90. I50. K0. F0.2 ;绝对坐标系程序或 G02 X100. Z90. R50. F0.2②G02 U40. W-30. I50. K0. F0.2 ;增量坐标系程序或 G02 U40. W-30. R50. F0.2第二原点返回 (G30)坐标系能够用第二原点功能来设置1. 用参数 (a, b) 设置刀具起点的坐标值。
点“a” 和“b” 是机床原点与起刀点之间的距离。
FANUC系统数控加工中心G指令全解G00 01 定位G00 IP…G01 直线插补G01 IP…F…G02 圆弧插补CW(顺时针)G03 圆弧插补CCW(反时针)G04 00 暂停G04 X(U,P)…(Q…)X(U,P);停刀时间(Q)Q1-Q4G08 先行控制G08 P…G09 准确停止G10 可编程数据输入G10 IP….G11 可编程数据输入方式取消G15 17 极坐标指令取消G16 极坐标指令G17 02 选择XpYp平面G18 选择ZpXp平面G19 选择YpZp平面G20 06 英寸输入G21 毫米输入G22 04 存储行程检测功能有效G23 存储行程检测功能无效G25 24 主轴速度泼动监测功能无效G26 主轴速度泼动监测功能有效G27 00返回参考点检测G27 IP…G28 返回参考点G28 IP…G29 从参考点返回G29 IP…G30 返回第2、3、4、参考点G30 IP…G31 跳转功能G31 IP…F…P…G33 01 螺纹切削G33 IP…F…G37 00 自动刀具长度测量G37 IP…G39 拐角偏置圆弧插补G40 07 取消刀尖R补偿G40 X(U)--Z(W)--I-- K-- G41 刀尖R补偿(左)G42 刀尖R补偿(右)G43 08 正向刀具长度补偿G43 Z… H…G44 负向刀具长度补偿G44 Z.. .H…G45 00 刀具偏置值增加G45 IP… D…G46 刀具偏置值减小G46 IP… D…G47 2倍刀具偏置值G47 IP… D…G48 1/2倍刀具偏置值G48 IP… D…G49 08 刀具长度补偿取消G50 11 比例缩放取消G51 比例缩放有效G51 X.. Y.. Z…P..G52 00 局部坐标系设定G52 IP…G53 选择机床坐标系G53 IP…G54 14 选择工件坐标系1G54.1 选择附加工件坐标系G54.1 PnG55 选择工件坐标系2G56 选择工件坐标系3G57 选择工件坐标系4G58 选择工件坐标系5G59 选择工件坐标系6G60 00/01 单方向定位G60 IP…G61 15 准确停止方式G62 自动拐角倍率G63 攻丝方式G64 切削方式G65 00 宏程序调用G65 P…L…G66 12 宏程序模态调用G66 P…L…G67 宏程序模态调用取消G68 16 坐标旋转/三维坐标转换G68 α…β…R…G69 坐标旋转取消/三维坐标转换取消G73 09 排屑钻孔循环G73 X… Y… Z…R… Q… F… K…G74 左旋攻丝循环G74 X… Y… Z…R… P… F… K…G76 09 精镗循环G76 X… Y… Z…R… Q…P… F… K…G80 09 固定循环取消/外部操作功能取消G81 钻孔循环、锪镗循环或外部操作功能G81 X… Y… Z… R… F… K…G82 钻孔循环或反镗循环G82 X… Y… Z… R…P… F… K…G83 排屑钻孔循环G83 X… Y… Z… R…Q… F… K…G84 攻丝循环G84 X… Y… Z… R…P…Q… F… K…G85 镗孔循环G85 X… Y… Z… R… F… K…G86 镗孔循环G86 X… Y… Z… R… F… K…G87 背镗循环G87 X… Y… Z… R…Q…P….F… K…G88 镗孔循环G88 X… Y… Z… R…P….F… K…G89 镗孔循环G89 X… Y… Z… R…P….F… K…G90 03 绝对值编程G90 IP…G91 增量值编程G91 IP…G92 00 设定工件坐标系或最大主轴速度钳制G92 IP…G92.1 工件坐标系预置G92.1 IP..G94 05 每分进给G94 F…G95 每转进给G95 F…G96 13 恒表面速度控制G96 S…G97 恒表面速度控制取消G97 S…G98 10 固定循环返回到初始点G99 固定循环返回到R点G160 20 横向进磨控制取消(磨床)G161 横向进磨控制(磨床)G161 R。