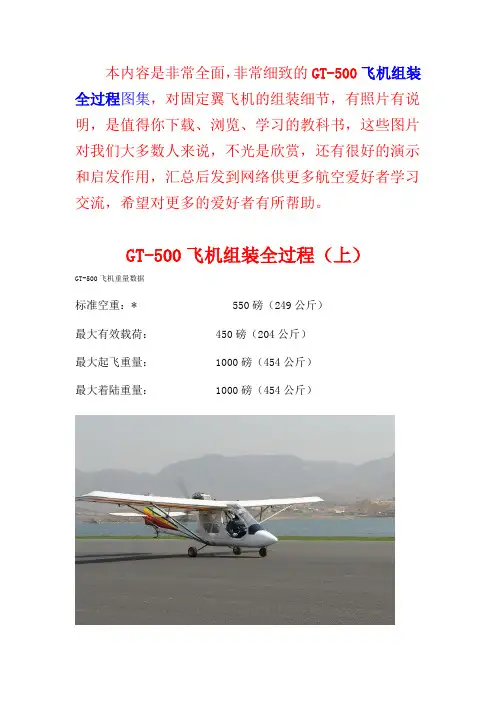
GT-500固定翼飞机组装全过程(上)
- 格式:doc
- 大小:13.94 MB
- 文档页数:97


Align Trex 500 安装详解作者作者::亚托官方论坛亚托官方论坛““蓝色机械鸟蓝色机械鸟””整理整理::5imx 论坛论坛““dennisz ”2008年1月31日原文原文::/disbb/viewthread.php?tid=18446&extra=page%3D1&page=1一.安装旋翼头1.将平衡杆固定座两边的M3双层轴套螺丝拆下,点上T43螺丝胶后,再上紧螺丝将平衡杆固定座固定2.将点上CA三秒胶的SF摇臂球头,固定在SF摇臂上,并确认锁紧到位注意:锁上球头前,请注意SF摇臂的方向性,ALIGN字样朝外!3.将组装好的两支SF摇臂,固定在平衡杆固定座上注意:注意SF摇臂的方向性4.组装B连杆,量好连杆长度注意:注意连杆头A字同边!5.将平衡框固定平衡翼球型控制球杆的四根螺丝拆下,并将组装好的B连杆套入平衡异球型控制球杆 注意:注意连杆头A字的方向性6.安装平衡翼球型控制球杆1)平衡翼球型控制球杆的螺丝点上T43螺丝胶后先行固定一边2)将金属平衡翼控制臂上的M3止泄螺丝拆下7.在500HT3零件包取出平衡杆8. 将平衡杆套入平衡杆固定座,在装上平衡框 注意:注意平衡杆上的固定凹槽朝上)9. 固定平衡杆1) 将另一边金属平衡翼控制臂套入平衡杆,再将固定螺丝点上T43螺丝胶好将其固定!2) 将金属平衡翼控制臂上的M3止泄螺丝孔,对准平衡杆凹槽,将M3止泄螺丝点上T43螺丝胶后将其所检固定!10. 稳定控制摇臂安装1) 将稳定控制摇臂从向位器拆下2) 将稳定控制摇臂球头点上CA 三秒胶3) 将头点上CA 三秒胶的球头固定在稳定控制摇臂,并确认锁紧到位!11. 将组装好的稳定控制摇臂固定在向位器上 注意:固定螺丝需点上T43螺丝胶注意:注意稳定控制摇臂固定在向位器上的方向性12. 安装十字盘1) 1.将十字盘的球头全部拆下2) 将球头点上T43螺丝胶后再依序锁紧在十字盘上13.将主轴套入金属主旋翼固定座后,再用轴套螺丝和防松螺冒锁紧固定14.金属夹座止推轴承安装顺序排列1)滑司2)止推轴承(IN)内径较大3)止推轴承滚珠4)止推轴承(OUT)内径较小5)横轴固定华司和螺丝15.将轴承滚珠涂上润滑油16.依序将只推轴承套入横轴,并用横轴固定螺丝暂时固定后,套入金属主旋翼夹座注意:注意IN字朝内17.利用横轴将止推轴承拉到位后,在松开横轴螺丝,并取出横轴18.另一边止推轴承依序套入横轴后,将横轴固定螺丝点上T43螺丝胶后所紧固定在横轴上在横轴涂上润滑油(下图红圈处)19.将组装好的止推横轴装入另一个金属主旋翼夹座,并套上横轴套圈(铜)20.将油封分别套入金属主旋翼固定座注意:注意 一边一个21.大桨夹安装1)将组装好的一边金属主旋翼夹座横轴套入金属主旋翼固定座(注意ALIGN字体朝上)2)在装入横轴套圈(铜)3)在横轴涂上润滑油-红圈处4)在横轴固定螺丝孔内涂上少许T43螺丝胶22.将刚刚组装好的另一组金属主旋翼夹座装上后,两边用起子对锁上紧! 注意:再一次提醒,金属主旋翼夹座ALIGN字体朝上23.将金属旋翼头制动器固定螺丝点上R48缺氧胶后锁紧固定再金属主旋异固定座上24.将向位器/稳定摇臂组套入主轴,并将B连杆头套入稳定摇臂球头25.旋翼头总装1)将十字盘套入主轴,并将稳定一连杆套入十字盘球头2)将主轴固定环暂时套入并轻微固定26.将A.C.D连杆组装好,并依说明书量好连杆长度27.将平衡翼贴纸平均贴于平衡翼两面,并将止泄螺丝锁上注意:平衡翼贴纸多了两张是备品,一面一张就可以,不要全贴上去了阿!28.建议在平衡杆螺纹处点上T43螺丝胶,再将平衡翼装上,量好平衡杆长度108mm后,注意平衡翼的方向性,之后侧面平视平衡翼与平衡框平行后,在上紧止泄螺丝将平衡翼固定二. 机身的组装1. 机身零件包2. 将主轴固定座卡榫确实套入左右侧版3. 将主轴固定座固定螺丝套入特殊华司后点上T43螺丝胶后,锁紧螺丝将其固定4.安装底版1)装上机身底板,并确实将侧版卡入2)将底板卡榫确实套入侧版,并确认底板与侧版密合5.底板固定螺丝套上特殊华司后,上检螺丝将其固定6.安装接收器固定座1)将接收器固定座卡榫确实套入侧版2)再用螺丝固定7.将马达金属固定座固定螺丝拆下8.将马达固定座装入机身并对准固定螺丝孔9.将固定螺丝点上T43螺丝胶后锁紧固定10.原作者欣赏机身。
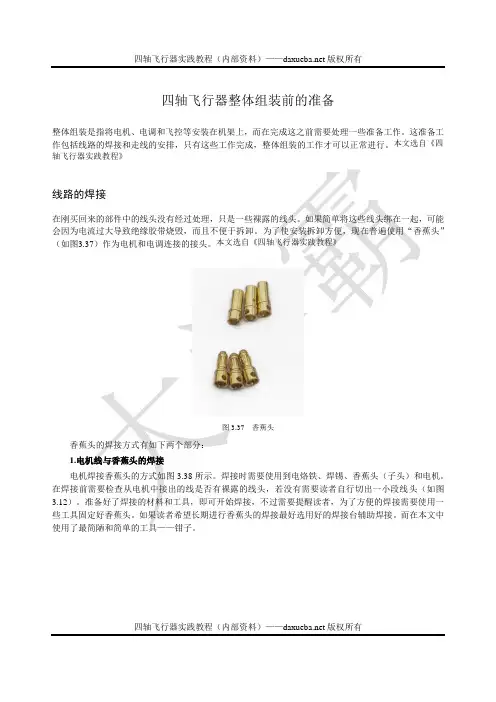
四轴飞行器实践教程(内部资料)——版权所有四轴飞行器整体组装前的准备整体组装是指将电机、电调和飞控等安装在机架上,而在完成这之前需要处理一些准备工作。
这准备工作包括线路的焊接和走线的安排,只有这些工作完成,整体组装的工作才可以正常进行。
本文选自《四轴飞行器实践教程》线路的焊接在刚买回来的部件中的线头没有经过处理,只是一些裸露的线头。
如果简单将这些线头绑在一起,可能会因为电流过大导致绝缘胶带烧毁,而且不便于拆卸。
为了使安装拆卸方便,现在普遍使用“香蕉头”(如图3.37)作为电机和电调连接的接头。
本文选自《四轴飞行器实践教程》图3.37 香蕉头香蕉头的焊接方式有如下两个部分:1.电机线与香蕉头的焊接电机焊接香蕉头的方式如图3.38所示。
焊接时需要使用到电烙铁、焊锡、香蕉头(子头)和电机。
在焊接前需要检查从电机中接出的线是否有裸露的线头,若没有需要读者自行切出一小段线头(如图3.12)。
准备好了焊接的材料和工具,即可开始焊接,不过需要提醒读者,为了方便的焊接需要使用一些工具固定好香蕉头。
如果读者希望长期进行香蕉头的焊接最好选用好的焊接台辅助焊接。
而在本文中使用了最简陋和简单的工具——钳子。
四轴飞行器实践教程(内部资料)——版权所有四轴飞行器实践教程(内部资料)——版权所有四轴飞行器实践教程(内部资料)——版权所有·37·图3.38电机线与香蕉头的焊接图3.39 电机线裸露的线头(1)焊接结构。
我们需要焊接的是电机线和香蕉头(如图3.40),焊接时需要按照如图3.41的方式来焊接。
图3.40 电机与香蕉头焊接配件图3.41 焊接方式(2)焊接方式焊接方式的分解如图3.42与3.43。
四轴飞行器实践教程(内部资料)—— 版权所有四轴飞行器实践教程(内部资料)—— 版权所有·38·图3.42 电机与香蕉头连接(一) 图3.43 电机与香蕉头连接(二)在焊接时,需要将香蕉头立起来,在没有专用的工具时可以使用钳子代替,如图3.44。
