数控机床的坐标系
- 格式:doc
- 大小:1.78 MB
- 文档页数:7
第1章数控编程基础1.1 数控加工的基本概念数控加工是20世纪40年代后期发展起来的一种自动化加工技术,它综合了计算机、自动控制、电机、电气传动、测量、监控和机械制造等学科的内容。
目前在制造业中数控加工已得到了广泛应用,并在制造业中已开始占据主导地位。
数控机床是数控加工的执行单元,它是数字控制机床(Numerically Controlled Machine Tool)的简称,是为了满足单件、小批、多品种自动化生产的需要而研制的一种灵活的、通用的、能够适应产品频繁变化的、以数字化控制为基本特征的柔性自动化机床,具有适应性强、加工精度高、加工质量稳定和生产效率高的优点。
1.1.1 数控与数控机床数控(Numerical Control,NC)是以数字化信号对机床运动及加工过程进行控制的一种方法。
数控机床是指应用数控技术对加工过程进行控制的机床。
数控机床是一种高效的自动化加工设备,它严格按照加工程序,可以自动地对被加工工件进行加工。
从数控系统外部输入的直接用于加工的程序称为数控加工程序(简称为数控程序),它是机床数控系统的应用软件。
与数控系统应用软件相对应的是数控系统内部的系统软件,系统软件是用于数控系统工作控制的。
本书主要介绍数控程序的编制。
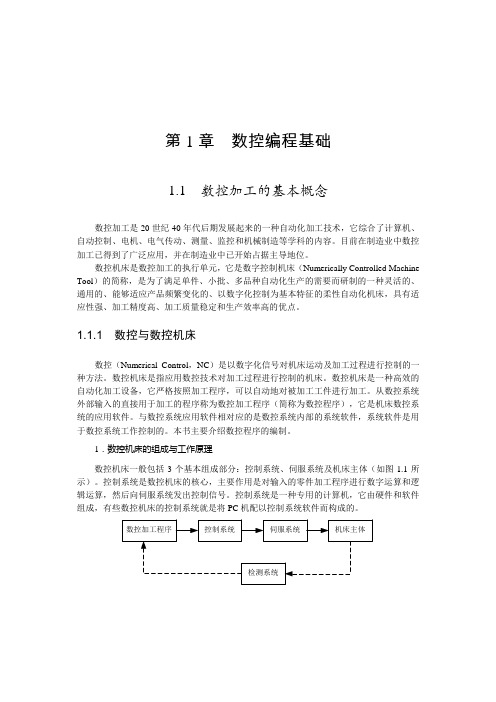
1.数控机床的组成与工作原理数控机床一般包括3个基本组成部分:控制系统、伺服系统及机床主体(如图1.1所示)。
控制系统是数控机床的核心,主要作用是对输入的零件加工程序进行数字运算和逻辑运算,然后向伺服系统发出控制信号。
控制系统是一种专用的计算机,它由硬件和软件组成,有些数控机床的控制系统就是将PC机配以控制系统软件而构成的。
数控编程理论、技术与应用·2·图1.1 数控机床的基本组成伺服系统的主要作用是根据控制系统发出的控制信号驱动执行元件运动。
伺服系统由驱动装置和执行元件组成,其中常用的执行元件有步进电机、直流伺服电机和交流伺服电机3种。
机床主体是加工运动的实际部件,包括主运动部件、进给运动部件(如工作台、刀架)和支撑部件(如床身、立柱)等。

一、基本坐标系机床坐标轴:为简化编程和保证程序的通用性,对数控机床的坐标轴和方向命名制定了统一的标准,规定直线进给坐标轴用X,Y,Z表示,称基本坐标轴。
X,Y,Z坐标轴的相互关系用右手笛卡尔法则确定,如下图所示图中大拇指指向X轴的正方向,食指指向Y轴的正方向,中指指向Z轴的正方向。
小结:机床坐标系坐标轴应遵循的原则运动方向的确定刀具相对与静止工件而运动的原则,且刀具远离工件的方向为坐标轴正方向。
则坐标系用加“’”的字母表示,按相对运动关系,工件运动的正方向恰好与刀具运动的正方向相反,则有:•+X=-X′ +Y=-Y′ +Z=-Z′•+A=-A′ +B=-B′ +C=-C′确定机床坐标轴的正方向坐标轴方向的确定1、Z轴坐标的运动一般取产生切削力的主轴轴线方向为Z轴方向2、X轴坐标的运动X轴一般位于平行于工件装夹面的水平面内,且垂直于Z轴,车床上是对应刀架的径向移动方向。
3、Y轴坐标的运动Y轴(车床上通常设为虚轴)于X轴和Z轴一起构成遵循右手笛卡尔坐标系。
确定机床坐标系各坐标轴的具体方位的方法二、坐标系的类型1、机床坐标系以机床原点为坐标原点建立起来的直角坐标系称为机床坐标系。
机床坐标系是机床固有的,它是制造和调整机床的基础,也是设置工件坐标系的基础。
其坐标轴及方向按标准规定,其坐标原点的位置则由各机床生产厂设定,一般情况下,不允许用户随意变动。
刀具运动的参照坐标系机床坐标系2、工件坐标系工件坐标系也称编程坐标系,专供编程时使用,选择工件上的某一已知点为原点,建立一个新的坐标系,称为工件坐标系。
,如下图所示。
工件坐标系一旦建立便一直有效,直到被新的坐标系所代替为止。
工件坐标系编制程序所用的参照坐标系机床坐标系和工件坐标系的对比工件坐标系机床坐标系三、各个基本点及关系画龙点睛1、机床原点机床坐标系的原点又称为机床原点或机床零点,这是一个固有的点,通常有机床制造厂确定。
它是数控车床进行加工运动的基准参考点。



数控机床的标准坐标系数控机床是一种通过数字控制系统来控制工具在加工过程中沿着预先确定的轨迹进行移动的机床。
在数控机床加工过程中,标准坐标系是非常重要的概念。
标准坐标系是指机床上工件加工所采用的坐标系,它是数控机床上各种运动的基准。
了解和掌握数控机床的标准坐标系对于操作数控机床、编写数控加工程序以及进行数控加工具有重要的意义。
本文将从数控机床的标准坐标系的概念、分类、特点以及应用等方面进行详细介绍。
一、概念。
标准坐标系是指在数控机床上确定的用于表示工件加工位置的坐标系。
它是数控机床上各个运动的基准,通常采用直角坐标系和极坐标系。
直角坐标系是指以机床主轴中心线为原点,分别沿着机床的X、Y、Z三个方向建立的坐标系。
而极坐标系则是以机床主轴中心线为原点,以半径和角度来表示工件的加工位置。
二、分类。
根据数控机床上的不同工作部件和加工方式,标准坐标系可以分为工件坐标系和机床坐标系。
工件坐标系是指以工件为参照物建立的坐标系,它随着工件的移动而移动。
而机床坐标系则是指以机床为参照物建立的坐标系,它是相对固定的。
根据工件的不同形状和加工要求,工件坐标系又可以分为直角坐标系和极坐标系。
三、特点。
数控机床的标准坐标系具有以下几个特点:1. 确定性,标准坐标系是确定的,它是数控机床上各种运动的基准,能够准确地表示工件的加工位置。
2. 统一性,在数控机床上,通常会规定一个统一的标准坐标系,以便于编写加工程序和进行加工操作。
3. 可移动性,工件坐标系随着工件的移动而移动,可以根据加工需要进行调整和变换。
4. 稳定性,机床坐标系相对固定,保持稳定性,不会随着工件的移动而变化。
四、应用。
标准坐标系在数控机床加工中有着广泛的应用,主要体现在以下几个方面:1. 编写加工程序,在进行数控加工时,需要根据工件的形状和加工要求,在相应的坐标系下编写加工程序,确定加工路径和加工参数。
2. 加工定位,在进行数控加工时,需要将工件放置在适当的位置,确定工件的坐标系,以便于进行加工定位和加工操作。
数控机床的坐标轴数控机床坐标轴的指定方法已标准化,我国在JB/T 305l —1999中规定了各种数控机床的坐标轴和运动方向。
1、坐标轴和运动方向命名的原则⑴标准的坐标系采用右手直角笛卡尔坐标系,如图2.3所示。
大拇指的方向为X 轴正方向,食指为Y 轴的正方向,中指为Z 轴的正方向。
⑵永远假定刀具相对于静止的工件而运动。
⑶标准规定:机床某一部件运动的正方向,是增大工件和刀具之间距离的方向。
⑷ 机床旋转坐标运动的正方向是按照右旋螺纹旋人工件的方向。
2、坐标轴的指定⑴ Z 轴① Z 轴是首先要指定的轴。
规定机床的主轴为Z 轴,由它提供切削功率。
② 如果机床没有主轴(如数控刨床),则取Z 轴为垂直于工件装夹表面方向。
③如果一个机床有多个主轴,则取常用的主轴为Z 轴。
⑵X 轴①X 轴通常是水平轴,它平行于工件的装夹表面。
②对于工件旋转的机床(如车床),X 轴的方向取水平的径向。
其正方向为刀具远离工件旋转中心的方向。
③对于刀具旋转的机床,若Z 轴是垂直的,当从主轴向立柱看时,X 轴正方向指向右若Z 轴是水平的,当从主轴向工件方向看时,X 轴正方向指向右。
④ 对刀具和工件均不旋转的机床,X 坐标平行于主要切削方向,并以切削方向为正方向。
⑶ Y 轴①Y 轴垂直于X 、Z 轴。
② Y 轴根据X 、Z 轴,按照右手直角笛卡尔坐标系确定。
⑷ 旋转坐标A 、B 、C A 、B 、C 分别表示其轴线平行于X 、Y 、Z 轴的旋转坐标。
A 、B 、C 的正方向,相应地表示在X 、Y 、Z 坐标正方向上,按照右旋螺纹前进的方向。
2.3.2机床坐标系与工件坐标系1、机床坐标系机床坐标系是机床上固有的坐标系,并设有坐标原点,该原点称为机床原点。
所谓机床原点是指机床上一个固定不变的点,它一般为各个坐标轴移动的极限位置。
2、工件坐标系图2.3右手直角笛卡尔坐标系工件坐标系在编程时使用,由编程人员在工件上设定某一点为原点,在其上建立工件坐标系。
数控机床的坐标系
2.1 数控机床的坐标系
在编写数控加工程序过程中,为了确定刀具与工件的相对位置,必须通过机床参考点和坐标系描述刀具的运动轨迹。
在国际ISO标准中,数控机床坐标轴和运动方向的设定均已标准化,我国机械工业部1982年颁布的
JB3052-82标准与国际ISO标准等效。
2.1.1 坐标系及运动方向
1. 坐标系的确定原则
1)刀具相对于静止工件而运动的原则这个原则规定不论数控机床是刀具运动还是工件运动,编程时均以刀具的运动轨迹来编写程序,这样可按零件图的加工轮廓直接确定数控机床的加工过程。
2)标准坐标系的规定标准坐标系是一个直角坐标系,如图2-1-1(a)所示,按右手直角坐标系规定,右手的拇指、食指和中指分别代表X、Y、Z三根直角坐标轴的方向;如图2-1-1(b)所示,旋转方向按右手螺旋法则规定,四指顺着轴的旋转方向,拇指与坐标轴同方向为轴的正旋转,反之为轴的反旋转,图中A、B、C 分别代表围绕X、Y、Z三根坐标轴的旋转方向。
图2-1-1 右手直角坐标系
3)坐标轴正负的规定使刀具与工件之间距离增大的方向规定为轴的正方向,反之为轴的反方向。
2. 机床坐标轴的确定方法 Z轴表示传递切削动力的主轴,X轴平行于工件的装夹平面,一般取水平位置,根据右手直角坐标系的规定,确定了X和Z坐标轴的方向,自然能确定Y轴的方向。
1)车床坐标系
如图2-1-2所示,Z坐标轴与车床的主轴同轴线,刀具横向运动方向为X坐标轴的方向,旋转方向C表示主轴的正转。
图2-1-2车床坐标系
2)立式铣床坐标系
坐标轴反方向运动的极限位置的交点,即在此状态下的工作台左前角上。
图2-1-5 数控车床坐标系的原点2)工件坐标系设定工件坐标系XpYpZp 目的是为了编程方便。
设置工件坐标系原点的原则尽可能选择在工件的设计基准和工艺基准上,工件坐标系的坐标轴方向与机床坐标系的坐标轴方向保持一致。
在数控车床中,如图
2-1-6所示,原点Op点一般设定在工件的右端面与主轴轴线的交点上。
在数控铣床中,如图2-1-7所示,Z轴的原点一般设定在工件的上表面,对于非对称工件,X、Y轴的原点一般设定在工件的左前角上;对于对称工件,X、Y轴的原点一般设定在工件对称轴的交点上。
图2-1-6 数控车床工件坐标系的
原点
图2-1-7 数控铣床工件坐标系的
原点(返回首页)
2.1.3 绝对坐标和相对坐标
1)绝对坐标表示法
将刀具运动位置的坐标值表示为相对于坐标原点的距离,这种坐标的表示法称之为绝对坐标表示法。
如图2-1-8所示。
大多数的数控系统都以G90指令表示使用绝对坐标编程。
图2-1-8 绝对坐标表示法2)相对坐标表示法
将刀具运动位置的坐标值表示为相对于前一位置坐标的增量,即为目标点
绝对坐标值与当前点绝对坐标值的差
值,这种坐标的表示法称之为相对坐标
表示法。
如图2-1-9所示。
图2-1-9 相对坐标表示法大多数的数控系统都以G91指令表示使用相对坐标编程,有的数控系统用X、Y、Z表示绝对坐标代码,用U、V、W表示相对坐标代码,在一个加工程序中以混合使用这二种坐标表示法编程。