应力张量的认识(一)
- 格式:doc
- 大小:192.50 KB
- 文档页数:4
应力张量分量引言应力张量分量是应力张量在一个特定的坐标系下的分量表示。
应力张量分量的理解对于材料科学和工程领域的应力分析具有重要意义。
在本文中,我们将了解应力张量的定义、表示方式、在不同坐标系下证明应力张量分量的变换规律以及一些应力分析方面的实际应用。
应力张量的定义应力张量是具有三个独立的分量的二阶张量,用于描述固体和液体中的应力状态。
应力可以理解为物体内部的力分布,因此应力张量可以表示为:σ = [σ11 σ12 σ13] [σ21 σ22σ23] [σ31σ32 σ33]其中,σ11、σ22 和σ33 表示沿着 x、y 和 z 轴的压力或拉力,σ12、σ13 和σ23 表示剪应力(或剪切应力)。
应力张量的表示方式为了确定应力张量的分量表示,我们需要选择一个参考坐标系。
在二维情况下,我们通常选择笛卡尔坐标系,其中坐标轴为 x 和 y。
在三维情况下,我们则使用三维笛卡尔坐标系,其中坐标轴为 x、y 和 z。
对于一个在一个给定坐标系下的应力张量,我们可以通过求解六个应力分量来表示它。
为了简化表示,通常使用下面的符号:σxx = σ11 σyy= σ22 σzz = σ33 σxy = σyx = σ12 σxz = σzx = σ13 σyz = σzy = σ23在这种表示方式下,σij 表示在 i 方向上对 j 方向的拉力或剪切力(也可以反过来表示)。
坐标系之间的转化当我们考虑不同的坐标系时,应力张量的表示会发生变化。
考虑两个不同的笛卡尔坐标系(原始坐标系和目标坐标系),它们的坐标轴可以写为以下矩阵的形式:[x'] [a11 a12 a13] [x] [y'] = [a21 a22 a23] [y] [z'] [a31 a32 a33] [z]其中,矩阵中的每个元素表示从目标坐标系中的一个坐标轴到原始坐标系中的相应坐标轴的投影。
为了推导出应力张量在不同坐标系下的表示,我们需要考虑以下事实:应力张量是下面这种形式的:σ = [ σxx σxy σxz] [ σxy σyyσyz] [ σxz σyz σzz]假设我们有一个 $n$ 维张量 $A$,其分量与坐标系之间的变换是 $A_{ij}^{'} = a_{ik} a_{jl} A_{kl}$。

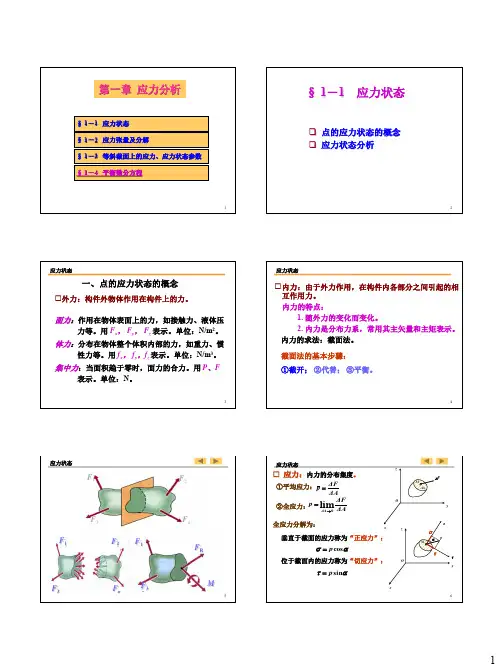
第一章应力分析§1-1 应力状态§1- 2 应力张量及分解§1-3 等斜截面上的应力、应力状态参数§1-4 平衡微分方程1§1-1 应力状态❑点的应力状态的概念❑应力状态分析2一、点的应力状态的概念面力:作用在物体表面上的力,如接触力、液体压力等。
用F x ,F y ,F z 表示。
单位:N/m 2。
体力:分布在物体整个体积内部的力,如重力、惯性力等。
用f x ,f y ,f z 表示。
单位:N/m 3。
集中力:当面积趋于零时,面力的合力。
用P 、F表示。
单位:N 。
应力状态☐外力:构件外物体作用在构件上的力。
3☐内力:由于外力作用,在构件内各部分之间引起的相互作用力。
内力的特点:1. 随外力的变化而变化。
2. 内力是分布力系,常用其主矢量和主矩表示。
内力的求法:截面法。
应力状态截面法的基本步骤:①截开;②代替;③平衡。
4F 1F RF 3MF 1F nF 3F 2F 1F nF 3F 2应力状态5①平均应力:②全应力:ΔA ΔFp =ΔAΔFp ΔA lim 0→=☐应力:内力的分布集度。
全应力分解为:垂直于截面的应力称为“正应力”:位于截面内的应力称为“切应力”:应力状态xyzOD FD AM τσxyzOpMnτaaσcos p =aτsin p =6应力状态的表示——单元体:一点的应力状态:过一点有无数的截面,这一点的各个截面上应力情况的集合,称为这点的应力状态(State of Stress at a Given Point )。
xyzσxσzσyτxyτyx ②单元体的性质a 、任一面上,应力均布;b 、平行面上,性质相同。
①单元体:构件内点的代表物,是包围被研究点的无限小的几何体,常用的是正六面体。
应力状态7xyzσxτxy τyxσz σyτxzτzx τzy τyzτyzσyτyx单元体上的应力分量:应力状态σx σy σz正应力:切应力:τxy τyx τyz τzy τzx τxz8切应力互等定理(Theorem of Conjugate Shearing Stress ):zy yz ττ=应力状态yxxy ττ=zxxz ττ=xyzτxyτyxσxσz σyτxz τzx τzyτyz过一点的两个正交面上,如果有与相交边垂直的切应力分量,则两个面上的这两个切应力分量一定等值、方向相对或相离。
应力张量和偏应力张量是固体力学中的重要概念,它们描述了物质内部的应力分布情况。
在工程结构分析和材料力学研究中,对于应力张量和偏应力张量的表达式有深入的了解是非常必要的。
本文将从应力张量和偏应力张量的定义、物理意义和数学表达式等方面展开讨论,希望能够使读者对这两个重要概念有一个清晰的认识。
一、应力张量的定义和物理意义应力张量描述了一个点在不同方向上的应力状态,它是一个二阶张量,通常用一个3x3的矩阵来表示。
对于一个物质点来说,如果用$\sigma$表示应力张量,那么$\sigma_{ij}$表示物质在i方向上受到的j方向上的应力。
在力学中,应力张量的定义是通过单位面积上的内力来描述的,它可以用来描述物质的弹性行为和变形情况。
在实际应用中,应力张量可以用来描述物质在受到外力或者外载荷作用下的应力分布情况。
通过对应力张量的分析,可以得到物质内部的应力状态和应力分布情况,这对于工程结构的设计和材料的力学性能分析都具有重要意义。
二、应力张量的数学表达式对于一个三维空间中的物质点来说,其应力张量可以用一个3x3的矩阵来表示,其表示形式为:$\sigma = \begin{bmatrix}\sigma_{11} \sigma_{12} \sigma_{13} \\\sigma_{21} \sigma_{22} \sigma_{23} \\\sigma_{31} \sigma_{32} \sigma_{33}\end{bmatrix}$其中,$\sigma_{ij}$表示物质在i方向上受到的j方向上的应力。
根据平衡方程和应变张量的定义,可以得到应力张量和应变张量之间的关系为$\sigma = D \varepsilon$,其中D为弹性模量矩阵,$\varepsilon$为应变张量。
三、偏应力张量的定义和物理意义偏应力张量是指物质分子间的相互作用力对物质体积的变化产生的应力,它描述了物质的变形情况。
在实际应用中,偏应力张量可以用来描述材料的弹性模量、泊松比等力学参数,对于材料的弹性行为和变形性能具有重要意义。
应力张量和应变张量的关系在物理和工程的世界里,有两个小伙伴总是形影不离,那就是应力张量和应变张量。
就像老鼠和米饭,或者说是鱼和水,这俩家伙其实是相辅相成的,缺一不可。
今天咱们就来聊聊这两位的关系,顺便让这话题变得轻松有趣,让大家听了觉得“这还真有意思!”1. 应力张量——你能忍受多少压力?1.1 什么是应力张量?应力张量嘛,可以简单理解为“压力的图谱”。
想象一下,你在参加一场拔河比赛,另一边的人使劲拉,你的手臂就会感受到拉力。
这个拉力就是应力。
如果我们把这个感觉用一个数学对象来表示,那就是应力张量。
它可以告诉我们在一个物体内部,各个方向上受到了多大的压力。
1.2 应力的分类应力可不是单一的,它分成好几种,像是“拉应力”、“压应力”和“剪应力”。
拉应力就像你拉一根橡皮筋,越拉越长;压应力则像是在面团上用力按,面团就变扁了。
至于剪应力嘛,想象一下你在切水果,刀子刮过的地方就是受到剪应力的地方。
通过这些应力,我们就能感受到物体内部的变化和状态。
2. 应变张量——变形的小精灵2.1 应变张量的概念说到应变张量,它就像是应力张量的反应者,专门负责记录物体是如何变形的。
用个简单的比喻来说,假如应力是拉面师傅的力量,那么应变就是拉出来的面条。
面条在拉伸的过程中,变长了,变细了,这就是应变在作怪。
2.2 应变的种类应变同样有多种形式,比如“拉伸应变”、“压缩应变”和“剪切应变”。
拉伸应变就像你把橡皮筋拉得细细的,压缩应变就像把一个泡沫压扁,而剪切应变就像你用力划过一块巧克力,让它变得不平整。
这些变形的形式让我们对材料的性能有了更深的理解。
3. 应力与应变——亲密无间的关系3.1 他们是好朋友说到应力和应变的关系,其实就是一个因果关系。
就像是“打虎亲兄弟,上阵父子兵”,应力会导致应变的发生。
你想啊,当一个物体受到外力作用时,它肯定会有所反应,这个反应就是应变。
这就像你被朋友拉着走,脚步肯定要跟着他的节奏走,这样才能保持平衡。
openfoam速度输运方程中的应力张量项OpenFOAM是一种开源的计算流体力学(CFD)软件,广泛应用于各种复杂的流体流动问题求解。
在OpenFOAM中,速度输运方程是CFD模拟中最基本的方程之一,用于描述流体中速度场的变化。
速度输运方程可以写成如下形式:∂(ρu)/∂t+∇·(ρu⊗u)=-∇p+∇·τ+ρf在上述方程中,ρ是流体的密度,u是速度向量,t是时间,(ρu)是流体运动量矩阵,⊗代表张量积,∇是梯度算子,p是压力,τ是应力张量,f是外力。
应力张量是速度输运方程中的重要项之一,用于描述流体中的粘性效应。
它表示了流体内各个方向上的应力分布情况。
在OpenFOAM中,应力张量通过流体的黏度和速度梯度计算得到。
在二维情况下,应力张量可以表示为:τ=2μD其中,τ是应力张量,μ是动力黏度,D是速度梯度。
动力黏度表示流体内部的黏性程度,它与流体的物理性质有关。
速度梯度表示速度场的变化率,它描述了速度向量随空间位置的变化情况。
在三维情况下,应力张量可以表示为:τ = 2μ[D - (1/3)tr(D)I]其中,D是速度梯度,tr(D)是速度梯度的迹,I是单位张量。
上式中的第二项用于保证流体的体积守恒性,消除速度场的体积扩散。
应力张量项直接影响了速度输运方程的解。
通过求解速度输运方程,可以得到流体中速度场的变化情况,从而揭示流体流动的特性。
因此,准确计算和处理应力张量项至关重要。
总之,OpenFOAM中的速度输运方程中的应力张量项描述了流体中的黏性效应,通过动力黏度和速度梯度计算得到。
准确处理和求解应力张量项对于准确模拟和预测流体流动行为具有重要意义。
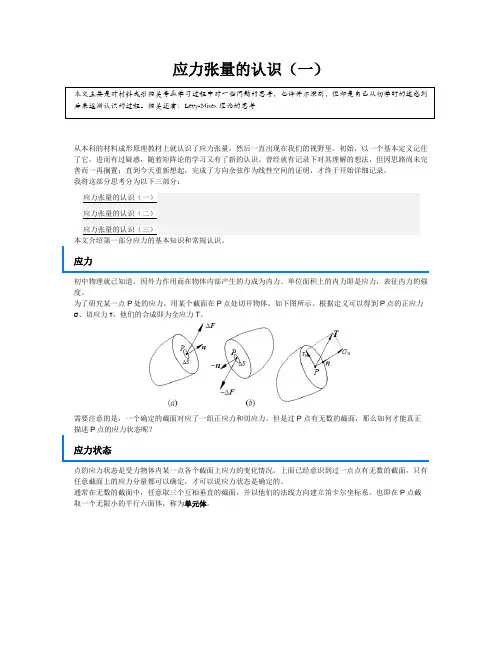
应力张量的认识(一)本文主要是对材料成形相关专业学习过程中对一些问题的思考,也许并不深刻,但却是自己从初学时的迷惑到后来逐渐认识的过程。
相关还有:Levy-Mises理论的思考从本科的材料成形原理教材上就认识了应力张量,然后一直出现在我们的视野里。
初始,以一个基本定义记住了它,进而有过疑惑,随着矩阵论的学习又有了新的认识。
曾经就有记录下对其理解的想法,但因思路尚未完善而一再搁置;直到今天重新想起,完成了方向余弦作为线性空间的证明,才终于开始详细记录。
我将这部分思考分为以下三部分:应力张量的认识(一)应力张量的认识(二)应力张量的认识(三)本文介绍第一部分应力的基本知识和常规认识。
应力初中物理就已知道,因外力作用而在物体内部产生的力成为内力。
单位面积上的内力即是应力,表征内力的强度。
为了研究某一点P处的应力,用某个截面在P点处切开物体,如下图所示。
根据定义可以得到P点的正应力σ、切应力τ,他们的合成即为全应力T。
需要注意的是,一个确定的截面对应了一组正应力和切应力。
但是过P点有无数的截面,那么如何才能真正描述P点的应力状态呢?应力状态点的应力状态是受力物体内某一点各个截面上应力的变化情况。
上面已经意识到过一点点有无数的截面,只有任意截面上的应力分量都可以确定,才可以说应力状态是确定的。
通常在无数的截面中,任意取三个互相垂直的截面,并以他们的法线方向建立笛卡尔坐标系。
也即在P点截取一个无限小的平行六面体,称为单元体。
单元体无限小,视为一点,因此单元体上相互平行的两个平面视为过该点的同一平面,也即他俩的应力是相同的。
这样就只用三个互相垂直的截面上的应力来分析问题。
由于单元体处于静力平衡状态,由绕各轴合力矩为零可以得到切应力互等定律。
问题:既然单元体上相互平行的两个平面视为过该点的同一平面,那为什么上图平行的平面上应力是相反的?单元体上相互平行的两个平面视为过该点的同一平面,但是分别是被截开的的两部分的平面,截开前他们是重合的,截开后成为了两部分各自的表面,而外表面是有方向的。

一 一点的应力状态与应力张量二 主应力与应力不变量对于一般空间问题,一点的应力状态可以由九个应力分量表示,如P 点处应力状态在直角坐标系可表示为ij S σ==x xy xz yx y yz zx zy z στττστττσ⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦如图1-1所示。
在固定受力情况下,应力分量大小与坐标轴方向有关,但由弹性力学可知,新旧坐标的应力分量具有一定变换关系。
通常,我们称这种具有特定变换关系的一些量为张量。
式(1-1)就是应力张量,它是二阶张量。
因为它具有xz τ=zx τ,xy τ=yx τ,yz τ=zy τ。
已知物体内某点P 的九个应力分量,则可求过该点的任意倾斜面上的应力。
在P 点处取出一无限小四面体oabc (图1-2)它的三个面分别与x,y,z 三个轴相垂直。
另一方面即任意斜面,它的法线N ,其方向余弦为l,m,n 。
分别以dF 、x dF 、y dF 、z dF 代表abc 、obc 、oac 、 oab 三角形面积。
x y z dF ldF dF mdF dF ndF ⎫=⎪=⎬⎪=⎭(1.2)在三个垂直于坐标的平面上有应力分量,在倾斜面abc 上有合应力N P ,它可分解为正应力N σ及切向剪应力N τ,即222N N N P στ=+N P 沿坐标轴方向分量为N x ,N y ,N z ,由平衡条件可得N x xy xz N yx y yz N zx zy z x l m n y l m n z l m n στττστττσ⎫=++⎪=++⎬⎪=++⎭求出N x ,N y ,N z 在法线上的投影之和,即得正应力N σ222222N N N N x y z xy yz zx x l y m z n l m n lm mn nl σσσστττ=++=+++++ 1-5而剪应力则由式1-5得 2N τ=2N P -2N σ在空间应力状态下一点的应力张量有三个主方向,三个主应力。
应力张量的定义什么是应力张量应力是物体内部的力对单位面积的分布情况。
在固体力学中,应力张量是一个描述物质内部应力状态的重要工具。
应力张量是一个二阶的张量,用于描述各个方向的应力分量。
构成应力张量的分量应力张量由9个分量组成,它们分别是X方向上的正应力、Y方向上的正应力、Z 方向上的正应力以及XY平面上的剪应力、YZ平面上的剪应力和ZX平面上的剪应力。
这些分量可以用一个3x3的矩阵表示,矩阵的每个元素代表相应的应力分量。
应力张量的矩阵表示如下:[ σ11 σ12 σ13 ][ σ21 σ22 σ23 ][ σ31 σ32 σ33 ]其中,σ11、σ22和σ33分别代表X、Y和Z方向上的正应力,σ12、σ21代表XY平面上的剪应力,σ13、σ31代表XZ平面上的剪应力,σ23、σ32代表YZ平面上的剪应力。
应力张量的物理意义应力张量的物理意义是它能够给出物体内部应力状态的详细信息。
通过应力张量,我们可以了解到不同方向上的应力分量的大小和方向。
应力张量可以用来计算物体的应力分布、应力变化以及应力的大小。
在材料工程、土木工程和机械工程等领域中,应力张量是非常重要的。
应力张量的计算方法计算应力张量的方法可以通过实验测定和数值模拟两种方式进行。
实验测定方法实验测定方法需要使用一些仪器设备来测量物体内部的应力情况。
常用的实验测定方法有:1.应变计法:通过在物体表面安装应变计,测量应变分布从而计算得到应力分布。
2.简支梁法:通过在梁上进行弯曲试验,测量不同位置上的弯矩和曲率来计算得到应力分布。
3.角度测量法:通过在物体表面安装角度测量仪,测量不同位置上的角度变化来计算得到应力分布。
数值模拟方法数值模拟方法是利用计算机进行模拟计算,通过输入物体的几何形状、材料力学性质和加载条件等参数,通过数学计算得到应力分布。
常用的数值模拟方法有:1.有限元法:将物体分割为有限个小单元,利用力学原理和数学方法建立方程组,通过求解方程组得到应力分布。
应力张量的认识(二)本文主要是对材料成形相关专业学习过程中对一些问题的思考,也许并不深刻,但却是自己从初学时的迷惑到后来逐渐认识的过程。
相关还有:Levy-Mises理论的思考应力张量的基础知识参见应力张量的认识(一)这一部分主要是对应力张量本质的理解。
相似矩阵通过基础知识我们已经认识到,应力张量代表点的应力状态,它不依赖于坐标系的选取,并且对应着同一主应力状态。
用矩阵的观点理解为:同一点的应力张量矩阵是相似矩阵,并且可以对角化。
然而问题是为什么会这样?我们可以这么理解,同一点不同截面下的应力张量描述的都是相同的应力状态,因此他们有着内在的联系(例如满足静力平衡方程)。
由切应力互等定律可知应力张量矩阵是实对称矩阵,由矩阵论可知实对称矩阵必定可以对角化,即不同截面应力张量对相似于一个主应力张量;而同一点的主应力状态是确定的。
于是由相似矩阵的传递性可知,不同截面下的应力张量矩阵是相似的。
线性变换从应力张量是相似矩阵再进一步——相似矩阵的本质是同一线性变换在不同基下表示的矩阵,我们就可以从更根本的角度看待应力张量了:应力张量代表一个线性变换!这是一个抽象的认识,或者说是从相似矩阵推论出来的。
那么接下来让他具体化:从前面已经知道,利用三个相互垂直的截面截取一点P,将各个截面上的所有应力分量组成一个整体的物理量——应力张量。
以这三个截面的法线方向为正方向建立笛卡尔坐标系,如下图所示。
那么对于任意法向为n=(n1,n2,n3)截面,可以得到面上作用的应力分量将上式改写成矩阵表达式其中,根据线性变换与矩阵的一一对应的关系,可知应力张量代表一个线性变换(确切的说是线性映射)——应力张量将截面位置映射到截面应力。
数学表述为:U是截面方向余弦组成的线性空间,V是截面应力作成的线性空间。
举例说明下面说明这个线性映射是如何与力学描述相一致的。
前面多次提到,用三个互相垂直的截面截取P点,并以其法向建立笛卡尔坐标系。
这样的截面有无数多对,这样的坐标系也有无数多个。
应力张量的物理意义
从繁复变化中的万象中找到“不变”是科学和人类的终极追求。
“不变”=本质。
“不变”的含义是某一物理量不管从那个角度来看都是同一的。
精确一点来讲,就是在不同的坐标系下其值是不变的。
具体到应力张量,虽然应力张量有六个分量,但是它有三个不变量。
如果旋转坐标系,六个分量值变化,但是三个不变量是不变的。
不变量的定义有一定的任意性,比如如果定义了一组不变量,那么也是一组不变量。
从这个意义来讲,没有必要去追求各个不变量的物理意义。
对于常用的应力不变量,解释常见。
比如三维空间的面,过度的解释为变形能等。
如果还要解释,常见的方法是用Lode coordinates或Haigh–Westergaard coordinates应力不变量的最常见应用是用来构造屈服函数。
各向同性的屈服函数值在经过坐标旋转后的值必须不变,那么屈服函数必须由不变量来构成。
从线性代数的角度,我们可以将某一点的应力张量视为线性空间内的一组基。
这组基在不同的坐标系下是各异的,但是在任一坐标系下其特征向量组成的正交基是统一的。
我认为不变量的存在是为了解释这个本质。
由于力学单元体的定义,应力张量这个矩阵是严格对称的,保证了相似对角化的可行。
首先要知道1、应变状态:应变状态是弹性体内某一点各个不同方向的应变情况同应力分量一样,物体内任一点的六个应变分量随坐标系的旋转而改变.弹性体也存在三个相互垂直的应变主方向,在物
体发生变形后,沿这三个方向的。
应力张量符号表示一对切应力【实用版】目录1.应力张量的基本概念2.应力张量的符号表示3.切应力的定义及表示方法4.应力张量与切应力的关系正文一、应力张量的基本概念应力张量是固体力学中描述物体内部应力分布的一个重要物理量,它可以反映出物体在受力情况下内部各个点处的应力状态。
应力张量是一个二阶张量,其包含了六个独立分量,分别表示物体在三个正交方向上的正应力和剪应力。
二、应力张量的符号表示应力张量的符号表示通常采用英文字母σij 来表示,其中σ表示应力张量,i 和 j 分别表示应力张量中的两个正交方向。
根据应力张量的定义,σij 表示作用在物体上两个正交方向上的应力之比。
在实际应用中,为了简化表达,通常将应力张量的六个分量表示为一个 3x3 的矩阵,即:σ ={σ11, σ12, σ13,σ21, σ22, σ23,σ31, σ32, σ33}三、切应力的定义及表示方法切应力是指物体在剪切变形过程中,由于内部各层之间的相对位移产生的应力。
切应力是一个矢量,其方向垂直于剪切面,并指向物体的截面形变方向。
切应力可以用符号τ表示,其分量表示为τxy、τyz 和τzx,分别表示 x-y 平面、y-z 平面和 z-x 平面上的切应力。
四、应力张量与切应力的关系应力张量与切应力之间存在密切的关系。
根据应力张量的定义,可以得到切应力的表达式:τ = σ * I其中,τ表示切应力,σ表示应力张量,I 表示单位张量。
由此可知,切应力是应力张量与单位张量的乘积。
在实际计算中,可以根据应力张量的六个分量计算出切应力的三个分量。
总结:应力张量是描述物体内部应力分布的重要物理量,它可以反映物体在受力情况下内部各个点处的应力状态。
应力张量的符号表示为σij,切应力是应力张量与单位张量的乘积。
雷诺应力张量
雷诺应力张量(Reynolds stress tensor)是描述流体中湍流现象的物理量。
它由雷诺应力(Reynolds stress)组成,表示流体中各个速度分量之间的相互作用。
雷诺应力张量可表示为一个3x3的矩阵,其中每个元素都代表了流体中不同速度分量之间的相互作用。
在笛卡尔坐标系下,雷诺应力张量的一般形式可以表示为:
τ_ij = ρ(u'_i*u'_j - u'_i'*u_j')
其中,τ_ij表示第i个速度分量和第j个速度分量之间的雷诺应力,ρ表示流体的密度,u'_i和u'_j分别表示第i个和第j个速度分量的涡动分量。
雷诺应力张量的大小和方向可以描述流体中的湍流强度和方向。
在湍流流动中,雷诺应力张量的非对角元素通常会表现出正负交替的特点,表示流体中湍流的剪切效应。
而对角元素则表示流体中湍流的压缩效应。
雷诺应力张量在湍流模拟和湍流流动研究中具有重要的应用价值。
通过对雷诺应力张量的计算和分析,可以了解湍流流动中的能量传递、湍流结构和湍流阻力等特性,对流体力学和工程流体力学等领域的研究有着重要的影响。
应力张量的认识(一)
本文主要是对材料成形相关专业学习过程中对一些问题的思考,也许并不深刻,但却是自己从初学时的迷惑到后来逐渐认识的过程。
相关还有:Levy-Mises理论的思考
从本科的材料成形原理教材上就认识了应力张量,然后一直出现在我们的视野里。
初始,以一个基本定义记住了它,进而有过疑惑,随着矩阵论的学习又有了新的认识。
曾经就有记录下对其理解的想法,但因思路尚未完善而一再搁置;直到今天重新想起,完成了方向余弦作为线性空间的证明,才终于开始详细记录。
我将这部分思考分为以下三部分:
应力张量的认识(一)
应力张量的认识(二)
应力张量的认识(三)
本文介绍第一部分应力的基本知识和常规认识。
应力
初中物理就已知道,因外力作用而在物体内部产生的力成为内力。
单位面积上的内力即是应力,表征内力的强度。
为了研究某一点P处的应力,用某个截面在P点处切开物体,如下图所示。
根据定义可以得到P点的正应力σ、切应力τ,他们的合成即为全应力T。
需要注意的是,一个确定的截面对应了一组正应力和切应力。
但是过P点有无数的截面,那么如何才能真正描述P点的应力状态呢?
应力状态
点的应力状态是受力物体内某一点各个截面上应力的变化情况。
上面已经意识到过一点点有无数的截面,只有任意截面上的应力分量都可以确定,才可以说应力状态是确定的。
通常在无数的截面中,任意取三个互相垂直的截面,并以他们的法线方向建立笛卡尔坐标系。
也即在P点截取一个无限小的平行六面体,称为单元体。
单元体无限小,视为一点,因此单元体上相互平行的两个平面视为过该点的同一平面,也即他俩的应力是相同的。
这样就只用三个互相垂直的截面上的应力来分析问题。
由于单元体处于静力平衡状态,由绕各轴合力矩为零可以得到切应力互等定律。
问题:既然单元体上相互平行的两个平面视为过该点的同一平面,那为什么上图平行的平面上应力是相反的?
单元体上相互平行的两个平面视为过该点的同一平面,但是分别是被截开的的两部分的平面,截开前他们是重合的,截开后成为了两部分各自的表面,而外表面是有方向的。
所以,从各自的方向上来看,应力方向还是相同的。
应力张量
根据上面的微单元体上的应力分量,是否可以求出任意截面的应力分量?
答案是肯定的。
根据三个方向的静力平衡就可以列式计算得到上图的任意的法向为(n1,n2,n3)的截面上的应力分量。
三个互相垂直的截面上的9个应力分量可以确定任意截面的应力,也就是说可以确定一点的应力状态了。
同时从这三个截面的选取上来看,他们和坐标系无关。
于是我们把用上面九个应力分量作为一个整体来描述一点应力状态的物理量叫作应力张量,记作
主应力
如果作用在某一截面上的全应力和这一截面垂直,即该截面上只有正应力,则这一截面称为主平面,其法线方向称为应力主方向,其上的应力称为主应力。
如果三个坐标轴方向都是主方向,则称这一坐标系为主坐标系。
求解方法依然是根据静力平衡条件。
应力张量不变量
在求解主应力的过程中会得到以主应力为未知数的三次方程,叫做状态方程。
状态方程的三个系数唯一由主应力确定,而一点的主应力是唯一的,这样就得到了不随坐标变化的三个量,叫作应力张量不变量
用一般应力表示为
主切应力
切应力有极值的截面叫主切应力平面,面上的切应力叫作主切应力。
六个主切应力中绝对值最大的叫作最大切应力。
通过计算可知,主切应力平面与主应力平面成45°夹角。
由于塑性变形是由切应力引起的,所以最大切应力可以作为判断屈服的准则。
应力张量分解
将三个正应力的平均值叫作平均应力,静水应力,应力张量减去这部分后得到应力偏张量。
应力偏张量同样有三个不变量。
应力张量分解的物理意义在于:
物体在应力张量作用下的变形分为体积变化和形状变化两部分;前者取决于应力球张量,后这取决于应力偏张量;体积变化表征弹性变形,当应力偏张量满足一定条件后,则物体发生塑性变形。
应力平衡微分方程
以上说明的都是一点的应力状态,而物体内部不同点的应力状态一般是不同的,那么如何描述相邻点间的应力变化关系呢?
以物体内某一点P(x,y,z)为顶点截取边长分别为dx,dy,dz的直角平行六面体微元,另一个顶点的坐标则为
(x+dx,y+dy,z+dz)。
根据静力平衡方程,并处理掉高阶小量,得到应力平衡微分方程:
问题:这部分中微六面体应力状态分析的图与之前一点应力状态的图即为相似,却有不同,如何理解?
二者的涵义完全不同。
点的应力状态图强调的是同一个点在不同截面下的状态,而微六面体应力状态分析强调的是相邻两个点之间的应力关系。
可以说前者是静态的,后者揭示的是相互作用的关系。
总结
这一部分梳理了我们常规学习的内容,可以概括为两点:
•应力张量——某点的应力状态
•应力平衡方程——相邻点的相互作用
接下来的部分将记录我对应力张量更为本质涵义的理解。