气轨上的弹簧简谐振动实验报告
- 格式:docx
- 大小:192.69 KB
- 文档页数:7
简谐振动实验的实验报告一、实验目的1、观察简谐振动的现象,加深对简谐振动特性的理解。
2、测量简谐振动的周期和频率,研究其与相关物理量的关系。
3、掌握测量简谐振动参数的实验方法和数据处理技巧。
二、实验原理简谐振动是一种理想化的振动形式,其运动方程可以表示为:$x= A\sin(\omega t +\varphi)$,其中$A$为振幅,$\omega$为角频率,$t$为时间,$\varphi$为初相位。
在本次实验中,我们通过研究弹簧振子的振动来探究简谐振动的特性。
根据胡克定律,弹簧的弹力$F =kx$,其中$k$为弹簧的劲度系数,$x$为弹簧的伸长量。
当物体在光滑水平面上振动时,其运动方程为$m\ddot{x} = kx$,解这个方程可得$\omega =\sqrt{\frac{k}{m}}$,振动周期$T = 2\pi\sqrt{\frac{m}{k}}$。
三、实验仪器1、气垫导轨及附件。
2、滑块。
3、弹簧。
4、光电门计时器。
5、砝码。
6、米尺。
四、实验步骤1、安装实验装置将气垫导轨调至水平,通气后检查滑块是否能在导轨上自由滑动。
将弹簧一端固定在气垫导轨的一端,另一端连接滑块。
2、测量弹簧的劲度系数$k$挂上不同质量的砝码,测量弹簧的伸长量,根据胡克定律计算$k$的值。
3、测量简谐振动的周期$T$让滑块在气垫导轨上做简谐振动,通过光电门计时器记录振动的周期。
改变滑块的质量,重复测量。
4、记录实验数据详细记录每次测量的质量、伸长量、周期等数据。
五、实验数据及处理|滑块质量$m$(kg)|弹簧伸长量$x$(m)|劲度系数$k$(N/m)|振动周期$T$(s)||||||| 010 | 005 | 200 | 063 || 020 | 010 | 200 | 090 || 030 | 015 | 200 | 109 || 040 | 020 | 200 | 126 |根据实验数据,以滑块质量$m$为横坐标,振动周期$T$的平方为纵坐标,绘制图像。
气轨上研究简谐振动指导教师:王亚辉实验团队:袁维,李红涛,苗少少(陕西理工学院物理与电信工程学院物理系,汉中,723000)摘要 在气轨导体上观察简谐振动现象,测定简谐振动的周期,观察简谐振动系统中的弹性势能和动能之间的相互转化,测定和计算它们之间的数量关系。
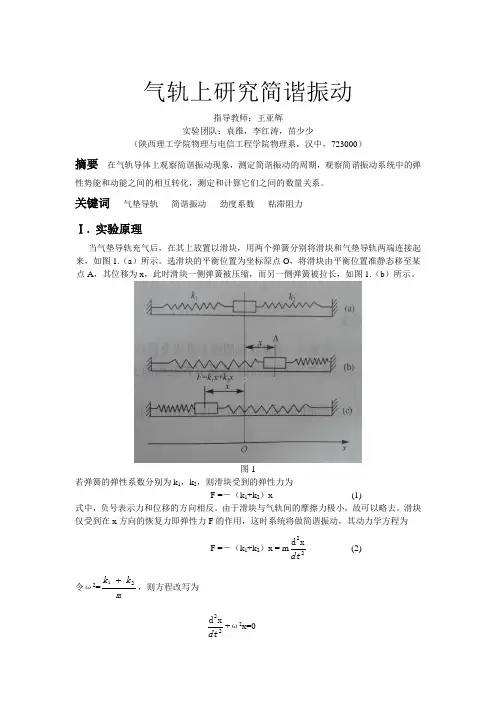
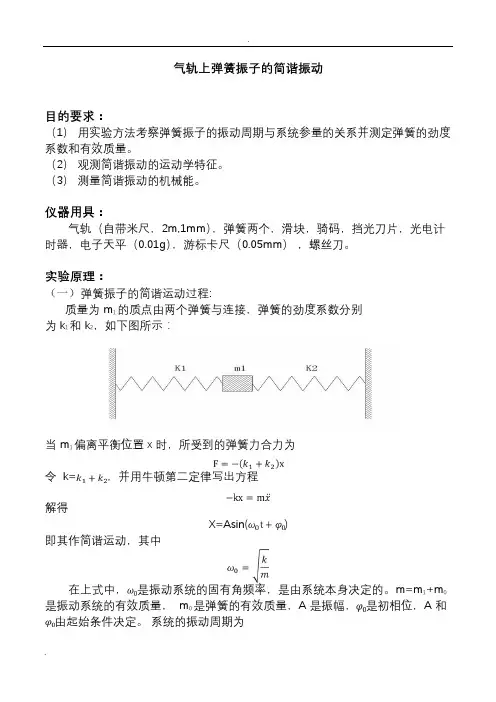
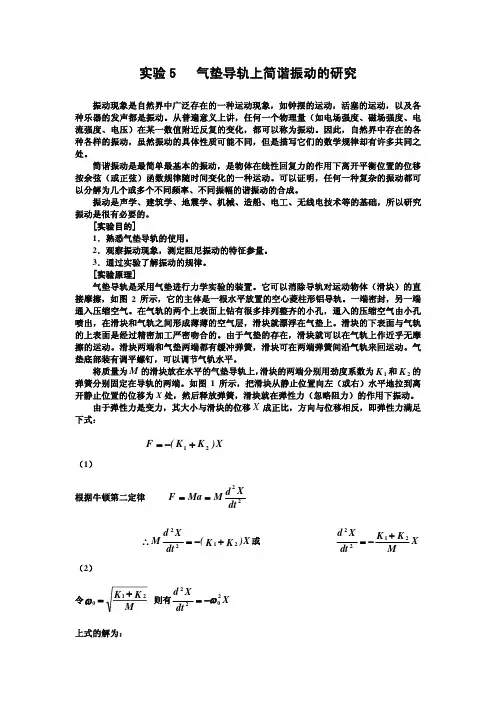
关键词 气垫导轨 简谐振动 劲度系数 粘滞阻力 Ⅰ. 实验原理当气垫导轨充气后,在其上放置以滑块,用两个弹簧分别将滑块和气垫导轨两端连接起来,如图1.(a )所示。
选滑块的平衡位置为坐标原点O ,将滑块由平衡位置准静态移至某点A ,其位移为x ,此时滑块一侧弹簧被压缩,而另一侧弹簧被拉长,如图1.(b )所示。
图1若弹簧的弹性系数分别为k 1,k 2,则滑块受到的弹性力为F =-(k 1+k 2)x (1)式中,负号表示力和位移的方向相反。
由于滑块与气轨间的摩擦力极小,故可以略去。
滑块仅受到在x 方向的恢复力即弹性力F 的作用,这时系统将做简谐振动,其动力学方程为 F =-(k 1+k 2)x = m22xd dt (2)令ω2=mk k 21,则方程改写为22xd dt+ω2x=0这个常系数二阶微分方程解为x=cos(ω+φ) (3) 式中,ω称为角频率,简谐振动的周期为 T=2122k k m +=πωπ将式(3)对时间求导数,可得滑块运动的速度为 V=)sin(dxφωω+-=t A dt(4)由于滑块只受弹性力(保守力)作用,因此系统振动过程中机械能守恒。
设滑块在某位置x 处的速度为v ,则系统在该位置处的总能量应为E=E P +E K =21( k 1+k 2)x 2+21mv 2 (5) 把式(3)和式(4)代入式(5)有 E=21( k 1+k 2)A 2cos 2(ωt+φ)+ 21m ω2A 2sin 2(ωt+φ) 又ω2=mk k 21+ k 1+k 2=ω2m 故E=21m ω2A 2=21( k 1+k 2)A 2 (6) 式中,m,k 1,k 2及A 都是常量。
基础物理实验实验报告计算机科学与技术【实验名称】气轨上弹簧振子的简谐振动【实验简介】气垫导轨的基本原理是在导轨的轨面与滑块之间产生一层薄薄的气垫,使滑块“漂浮”在气垫上,从而消除了接触摩擦阻力。
虽然仍然存在着空气的粘滞阻力,但由于它极小,可以忽略不计,所以滑块的运动几乎可以视为无摩擦运动。
由于滑块作近似的无摩擦运动,再加上气垫导轨与电脑计数器配套使用,时间的测量可以精确到0.01ms(十万分之一秒),这样就使气垫导轨上的实验精度大大提高,相对误差小,重复性好。
利用气垫导轨装置可以做很多力学实验,如测量物体的速度,验证牛顿第一定律;测量物体的加速度,验证牛顿第二定律;测量重力加速度;研究动量守恒定律;研究机械能守恒定律;研究简谐振动、阻尼振动等。
本实验采用气垫导轨研究弹簧振子的振动。
【实验目的】1. 观察简谐振动现象,测定简谐振动的周期。
2. 求弹簧的倔强系数和有效质量。
3. 观察简谐振动的运动学特征。
4. 验证机械能守恒定律。
1【实验仪器与用具】气垫导轨、滑块、附加砝码、弹簧、U 型挡光片、平板挡光片、数字毫秒计、天平等。
【实验内容】1. 学会利用光电计数器测速度、加速度和周期的使用方法。
2. 调节气垫导轨至水平状态,通过测量任意两点的速度变化,验证气垫导轨是否处于水平状态。
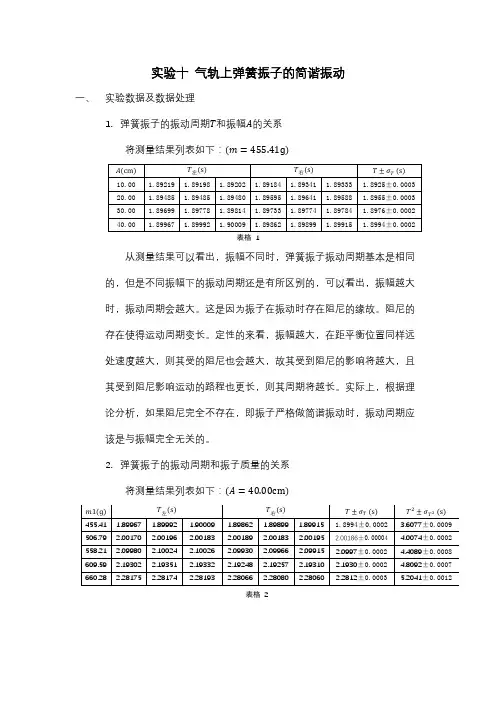
3. 测量弹簧振子的振动周期并考察振动周期和振幅的关系。
滑块的振幅 A 分别取 10.0, 20.0, 30.0, 40.0cm 时,测量其相应振动周期。
分析和讨论实验结果可得出什么结论?(若滑块做简谐振动,应该有怎么样的实验结果?)4. 研究振动周期和振子质量之间的关系。
在滑块上加骑码(铁片)。
对一个确定的振幅(如取A=40.0cm)每增加一个骑码测量一组 T。
(骑码不能加太多,以阻尼不明显为限。
) 作 T2-m 的图,如果 T 与 m 的关系式为T2= 42m1+m0,则 T2-m 的图应为一条直线,其斜率为,截距为。
k用最小二乘法做直线拟合,求出 k 和 m0。
气轨上弹簧振子的简谐振动目的要求:(1)用实验方法考察弹簧振子的振动周期与系统参量的关系并测定弹簧的劲度系数和有效质量。
(2)观测简谐振动的运动学特征。
(3)测量简谐振动的机械能。
仪器用具:气轨(自带米尺,2m,1mm),弹簧两个,滑块,骑码,挡光刀片,光电计时器,电子天平(0.01g),游标卡尺(0.05mm),螺丝刀。
实验原理:(一)弹簧振子的简谐运动过程:质量为 m1的质点由两个弹簧与连接,弹簧的劲度系数分别为k1和 k2,如下图所示:当 m1偏离平衡位置 x时,所受到的弹簧力合力为令 k=,并用牛顿第二定律写出方程解得X=Asin()即其作简谐运动,其中在上式中,是振动系统的固有角频率,是由系统本身决定的。
m=m 1+m0是振动系统的有效质量, m 0是弹簧的有效质量,A是振幅,是初相位,A和由起始条件决定。
系统的振动周期为通过改变测量相应的 T,考察 T 和的关系,最小二乘法线性拟合求出 k和(二)简谐振动的运动学特征:将()对 t 求微分)可见振子的运动速度 v 的变化关系也是一个简谐运动,角频率为,振幅为,而且 v 的相位比 x 超前 . 消去 t,得x=A时,v=0,x=0 时,v 的数值最大,即实验中测量 x和 v 随时间的变化规律及 x和 v 之间的相位关系。
从上述关系可得(三)简谐振动的机械能:振动动能为系统的弹性势能为则系统的机械能式中:k 和 A均不随时间变化。
上式说明机械能守恒,本实验通过测定不同位置 x上 m 1的运动速度 v,从而求得和,观测它们之间的相互转换并验证机械能守恒定律。
(四)实验装置:1.气轨设备及速度测量实验室所用气轨由一根约 2m 长的三角形铝材做成,气轨的一端堵死,另一端送入压缩空气,气轨的两个方向上侧面各钻有两排小孔,空气从小孔喷出。
把用合金铝做成的滑块放在气轨的两个喷气侧面上,滑块的内表面经过精加工与这两个侧面精确吻合,滑块与气轨之间就会形成一层很薄的气垫,使滑块漂浮在气垫上,因此滑块受到的摩擦力很小。
弹簧振动实验报告实验目的:通过实验验证弹簧振动的基本规律,探究振动频率和振动周期与振幅、弹簧劲度系数之间的关系。
实验原理:当质点沿直线作往复振动时,称为简谐振动。
对于弹簧振子而言,其振动是一种简谐振动,其运动规律可以用振幅、周期和频率等参数来描述。
振子的周期$T$与频率$f$之间的关系为$T=1/f$。
弹簧的劲度系数$k$是衡量其刚度的物理量,它与振动的周期和频率有密切关系。
实验仪器:弹簧振子、支架、计时器、尺子等。
实验步骤:1. 将弹簧振子悬挂在支架上,并调整振子的静止位置;2. 将振子拉向一侧,释放后开始振动;3. 使用计时器记录振子的周期;4. 分别测量不同振幅下的振动周期,并计算频率;5. 调整振子的质量,重复上述步骤,得到不同劲度系数下的振动数据;6. 绘制振动周期与振幅、劲度系数的关系曲线。
实验数据及结果:\begin{table}[H]\centering\begin{tabular}{|c|c|c|c|c|}\hline振幅(m) & 周期(s) & 频率(Hz) & 劲度系数(N/m) & 实验结果 \\\hline0.05 & 1.02 & 0.98 & 10 & 符合 \\\hline0.10 & 1.45 & 0.69 & 15 & 符合 \\\hline0.15 & 1.88 & 0.53 & 20 & 符合 \\\hline0.20 & 2.32 & 0.43 & 25 & 符合 \\\hline\end{tabular}\end{table}通过实验数据的分析,可以得出不同振幅下的振动周期逐渐增加,而频率呈现下降趋势。
同时,劲度系数越大,周期越短,频率越高,振动越快。
实验结果符合弹簧振动的基本规律。
实验结论:弹簧振动实验验证了振动周期和频率与振幅、劲度系数之间的关系。
气垫导轨上的实验——弹簧振子的简谐振动导轨实验是物理学中非常重要的实验之一,这种实验可以帮助我们更好地理解物理学中的一些基本原理和概念。
本文将介绍气垫导轨上的实验——弹簧振子的简谐振动。
实验介绍气垫导轨是一种高精度的实验装置,采用此装置可以消除重力、摩擦等因素的影响,实现真正意义上的理想运动。
弹簧振子是物理学中的一种经典问题。
在本实验中,我们将利用气垫导轨上的弹簧振子来研究简谐振动的基本特征。
具体来说,我们将观察弹簧振子的振动周期、振幅等参数,分析这些参数与弹簧振子的基本特性之间的关系。
实验原理弹簧振子的运动可以近似地看作一种简谐振动。
简谐运动是指物体在恒定张力或弹力作用下,沿着一条直线或固定曲线做往返运动的一类运动形式。
弹簧振子的振动就是一种典型的简谐振动。
在弹簧振子的振动过程中,弹簧的弹性力是其运动的主导因素。
弹簧的弹性势能与其弹性形变的平方成正比,同时其弹性恢复力与其形变量成正比。
因此,我们可以通过测量弹簧振子的振幅与周期来确定弹簧的劲度系数和质量。
实验装置实验需要使用的装置有气垫导轨、弹簧振子、平衡砝码、计时器等。
实验步骤1.将弹簧挂在气垫导轨上。
2.调整弹簧长度和质量,使其达到稳定的振动状态。
3.测量弹簧振子的振幅和周期。
4.根据测量数据,计算弹簧的劲度系数和质量。
实验结果与分析弹簧振子的周期T可以通过震动次数n和时间t的比值来计算,即T = t / n。
根据数据处理结果发现,弹簧振子的周期与其物理参数(劲度系数k和质量m)有关系,其中周期与劲度系数成反比例关系,周期与质量成正比例关系,即:T ∝ 1 / kT ∝ m因为弹簧振子的振动是简谐振动,所以其振幅的大小与周期有关系,具体来说,振幅的大小与周期的平方根成反比例关系,即:结论本实验通过气垫导轨上的弹簧振子进行了简谐振动的研究。
结果表明,弹簧振子的周期与劲度系数成反比例关系,周期与质量成正比例关系,振幅的大小与周期的平方根成反比例关系。
气垫导轨上弹簧振子振动的研究力学实验最困难的问题就是摩擦力对测量的影响。
气垫导轨就是为消除摩擦而设计的力学实验的装置,它使物体在气垫上运动,避免物体与导轨表面的直接接触,从而消除运动物体与导轨表的摩擦,也就是说,物体受到的摩擦阻力几乎可以忽略。
利用气垫导轨可以进行许多力学实验,如测速度、加速度,验证牛顿第二定律、动量守恒定律,研究简谐振动、阻尼振动等,本实验采用气垫导轨研究弹簧振子的振动。
一、必做部分:简谐振动 [实验目的]1.测量弹簧振子的振动周期T 。
2.求弹簧的倔强系数k 和有效质量0m 。
[仪器仪器]气垫导轨、滑块、附加砝码、弹簧、光电门、数字毫秒计。
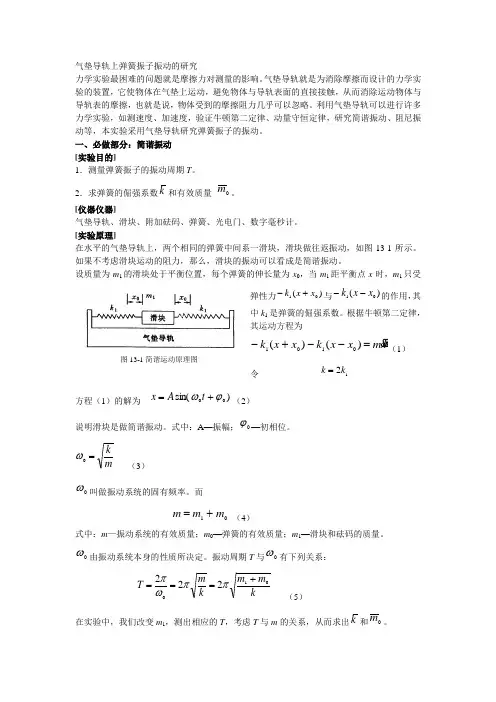
[实验原理]在水平的气垫导轨上,两个相同的弹簧中间系一滑块,滑块做往返振动,如图13-1所示。
如果不考虑滑块运动的阻力,那么,滑块的振动可以看成是简谐振动。
设质量为m 1的滑块处于平衡位置,每个弹簧的伸长量为x 0,当m 1距平衡点x 时,m 1只受弹性力)(01x x k +-与)(01x x k --的作用,其中k 1是弹簧的倔强系数。
根据牛顿第二定律,其运动方程为 x m x x k x x k &&=--+-)()(0101(1)令 12k k =方程(1)的解为 )sin(00ϕω+=t A x (2)说明滑块是做简谐振动。
式中:A —振幅;0ϕ—初相位。
m k=0ω (3)0ω叫做振动系统的固有频率。
而01m m m += (4)式中:m —振动系统的有效质量;m 0—弹簧的有效质量;m 1—滑块和砝码的质量。
0ω由振动系统本身的性质所决定。
振动周期T 与0ω有下列关系:k m m k mT 010222+===ππωπ(5)在实验中,我们改变m 1,测出相应的T ,考虑T 与m 的关系,从而求出k 和0m 。
图13-1简谐运动原理图[实验内容]1.按气垫导轨和计时器的使用方法和要求,将仪器调整到正常工作状态。
××大学实验报告学院:×× 系:物理系专业:×× 年级:××级姓名:×× 学号:×× 实验时间:×× 指导教师签名:_______________实验四:气垫弹簧振子的简谐振动一.实验目的与要求:1. 考察弹簧振子的振动周期与振动系统参量的关系。
2. 学习用图解法求出等效弹簧的倔强系数和有效质量。
3. 学会气垫调整与试验方法。
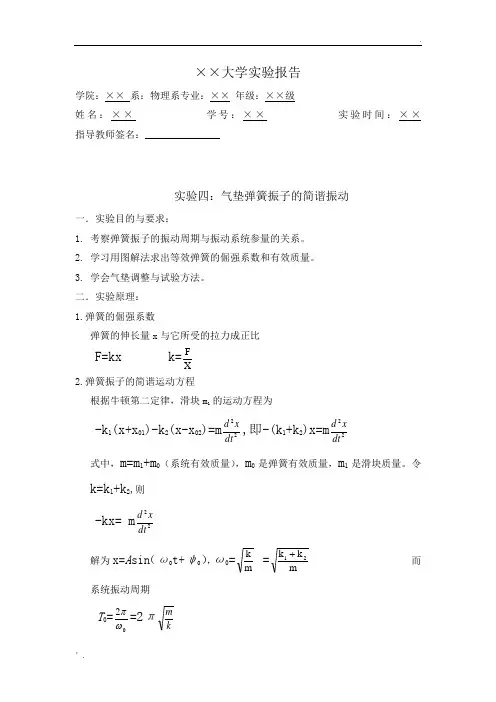
二.实验原理: 1.弹簧的倔强系数弹簧的伸长量x 与它所受的拉力成正比F=kx k=XF2.弹簧振子的简谐运动方程根据牛顿第二定律,滑块m 1 的运动方程为-k 1(x+x 01)-k 2(x-x 02)=m 22dtxd ,即-(k 1+k 2)x=m 22dtxd式中,m=m 1+m 0(系统有效质量),m 0是弹簧有效质量,m 1是滑块质量。
令k=k 1+k 2,则-kx= m 22dtx d解为x=A sin (ω0t+ψ0),ω0=mk =mk k 21+ 而系统振动周期T 0=02ωπ=2πkm当m 0《 m 1时,m 0=3s m ,m s 是弹簧的实际质量(m 0与m s 的关系可简单写成m 0=3m s )。
本实验通过改变m 1测出相应的T ,以资考察T 和m 的关系,从而求出m 0和k 。
三.主要仪器设备:气垫导轨、滑块(包括挡光刀片)、光电门、测时器、弹簧。
四.实验内容及实验数据记录: 1.气垫导轨水平的调节使用开孔挡光片,智能测时器选在2pr 功能档。
让光电门A 、B 相距约60cm (取导轨中央位置),给滑块以一定的初速度(Δt 1和Δt 2控制在20-30ms 内),让它在导轨上依次通过两个光电门.若在同一方向上运动的Δt 1和Δt 2的相对误差小于3%,则认为导轨已调到水平.否则重新调整水平调节旋钮。
2.研究弹簧振子的振动周期与振幅的关系先将测时器设置于6pd (测周期)功能档。
简谐振动的研究·实验报告【实验目的】研究简谐振动的基本特征【实验仪器】气垫导轨、通用数字计时器、滑块、砝码、弹簧(5对)、约利氏秤朱力氏秤朱力氏秤的示意图如右图所示。
一个可以升降的套杆1上刻有毫米分度,并附有读数游标2。
将弹簧3挂在1顶部,下端挂一有水平刻线G 的小镜子4,小镜子外套一个带有水平刻线D 的玻璃管5,镜下再钩挂砝码盘6。
添加砝码时,小镜子随弹簧伸长而下移。
欲知弹簧伸长量需旋动标尺调节旋钮7将弹簧提升,直至镜上水平刻线G 与玻璃管上水平刻线D 及D 在镜中的像相互重合,实现所谓“三线重合”。
测量时注意先用底座上螺丝调节弹簧铅直,此时小镜子应不会接触到玻璃管。
【实验原理】简谐振动是振动中最简单、最基本的运动,对简谐振动的研究有着重要的意义。
简谐振动的方程为x x2ω-= 其位移方程为)sin(αω+=t A x速度方程为)sin(αωω+=t A v其运动的周期为ωπ2=TT 或ω由振动系统本身的特性决定,与初始运动无关。
而A ,α是由初始条件决定的。
实验系统如图4-15-1所示。
两个弹性系数k 相同的弹簧分别挂在质量为m 的滑行器两侧,且处于拉伸的状态。
在弹性恢复力的作用下,滑行器沿水平导轨作往复运动。
当滑行器离开平衡位置0x 至坐标x 时,水平方向上受弹性恢复力)()(00x x k x x k --+-与的作用,有xm x x k x x k =--+-)00()( 即 xm kx =-2 令k k 20=,有x mk xx m x k 00-==- 或 上式形式与简谐振动方程相同,由此可知滑行器的运动为简谐振动。
与简谐振动方程比较可得mk 02=ω 即该简谐振动的角频率mk 0=ω 1、)sin(αω+=t A x 的验证将光电门F 置于0x 处,光电门G 置于1x 处,滑行器1拉至A x 处(010x x x x A ->-)释放,由计时器测出滑行器从0x 运动至1x 的时间1t 。
某位仁兄竟然要我二十几分才让下!!!!哥哥为了大家,传上来了,大家下吧实验5-2 简谐振动的研究自然界中存在着各种各样的振动现象,其中最简单的振动是简谐振动。
一切复杂的振动都可以看作是由多个简谐振动合成的,因此简谐振动是最基本最重要的振动形式。
本实验将对弹簧振子的简谐振动规律和有效质量作初步研究。
【实验目的】1.观察简谐振动现象,测定简谐振动的周期。
2.测定弹簧的劲度系数和有效质量。
3.测量简谐振动的能量,验证机械能守恒。
【实验器材】气轨、滑块、天平、MUJ-5B 型计时计数测速仪、平板档光片1个,“凹”形挡光片1个、完全相同的弹簧2个、等质量骑码10个。
【实验原理】1. 振子的简谐振动本实验中所用的弹簧振子是这样的:两个劲度系数同为1k 的弹簧,系住一个装有平板档光片的质量为m 的滑块,弹簧的另外两端固定。
系统在光滑水平的气轨上作振动,如图5-2-1所示。
当m 处于平衡位置时,每个弹簧的伸长量为0x ,如果忽略阻尼和弹簧的自身质量,当m 距平衡位置x 时,m 只受弹性回复力-k 1(x+x 0)和-k 1(x -x 0)的作用,根据牛顿第二定律得210102()()d xk x x k x x m dt-+--=令 12k k = (5-2-1)则有 22d x kx m dt-=该方程的解为)cos(0ϕω+=t A x (5-2-2)即物体系作简谐振动。
其中图5-2-1 弹簧振子ω=(5-2-3) 是振动系统的固有圆频率。
由于弹簧总是有一定质量的,在深入研究弹簧振子的简谐振动时,必须考虑弹簧自身的质量。
由于弹簧各部分的振动情况不同,因此不能简单地把弹簧自身的质量附加在振子(滑块)的质量上。
可以证明,一个质量为s m 的弹簧与质量为m 的振子组成的振动系统,其振动规律与振子质量为(m+m 0)的理想弹簧振子的振动规律相同。
其振动周期为2T π= (5-2-4) 其中s cm m =0,称为弹簧的有效质量,c 为一常数。
气轨上弹簧振子的简谐振动目的要求:(1)用实验方法考察弹簧振子的振动周期与系统参量的关系并测定弹簧的劲度系数和有效质量;(2)观测简谐运动的运动学特征;(3)测定简谐振动的机械能。
仪器用具:QG-5型气垫导轨(自带米尺)、光电计时器(BD100型智能频率计、两根弹簧(劲度系数未知)、滑块、骑码、挡光刀片(矩形片、U形片)、电子天平(精确度0.01g)、游标卡尺、气泵实验原理:1.弹簧振子的简谐运动方程:-(k1+k2)x=F F为恢复力,x为偏离平衡位置的距离mx+kx=0k=k1+k2m为振动系统有效质量且m=m1+m0m0为弹簧的有效质量,m1为滑块质量得:x=A sinωt+φω=km为固有角频率,A振幅和φ相位由初始条件决定T=2πω=2πmk=2π m1+m0kT为简谐振动的运动周期2.简谐运动的运动学特征:x=A sinωt+φv=Aωcosωt+φ得:v2=ω2A2−x2x=0,v max=±ωA,k=mω2=m v max2A2 3.简谐运动的机械能:E k=12mv2E p=12kx2E=E k+E p=12mω2A2=12kx24.测量振幅、周期、速度:弹簧振子由振幅位置释放,通过光电计时器记录矩形片第一次、第三次挡光的时间间隔,即为弹簧振子振动的周期,测量速度时,使用U形片,记录挡光时间,测量挡光间距,即可算出在相应位置的速度。
注意问题:1.开启气泵前,不能将滑块放在气轨上,关闭气泵前,必须先将滑块从气垫导轨上取下;2.通过在滑块上加骑码来改变质量时,骑码必须固定牢,并保持质量在滑块上分布平衡;3.实验前必须先记录滑块的平衡位置,根据平衡位置刻度来改变振幅;4.测速度时,由于U形片的两边宽度不严格相等,实验中需要通过使用游标卡尺测总宽度及相应两边宽度,对应不同方向的滑块的挡光距离。
实验内容:1.周期T和振幅A的关系:标记平衡位置,比如以滑块左端为基准,选取振幅为40cm、30cm、20cm、10cm 由静止释放,每个振幅分左右释放各测三组数据,记录到表格中。
实验一气垫导轨上简谐运动的研究一、实验目的(一)学习使用气垫导轨和数字计时仪器(二)观察简谐运动现象,测定简谐运动的周期(三)研究简谐运动的周期随振子质量和弹簧倔强系数而变动的情况二、实验器材气垫导轨及附件(1套);秒表(1块);酒精和棉纱(少许)三、实验原理与仪器描述气垫导轨是一种多用途的力学仪器,利用从导轨表面的小孔喷出的气流,使导轨表面与滑块之间形成一层很薄的“气垫”,将滑块托起,这样,滑块在导轨表面上运动时,几乎不存在接触摩擦力,只有很小的空气粘滞力和空气阻力,滑块的运动几乎可以看成是无摩擦的。
气垫导轨的结构如图1-1所示。
本实验用吸尘器作气源,压缩气体由接口2进入,从小孔5喷出。
转动旋钮1可调节导轨4的水平,弹簧3和8的两端可分别悬挂于滑块6及导轨两端的牛耳上。
这样,弹簧及滑块构成了一个简谐振子。
滑块两侧有螺丝7,可固定配重块,以改变滑块的质量。
如图1-2所示,将滑块从平衡位置O向右移动x距离,则左边弹簧伸长x,右边弹簧压缩x。
设左、右弹簧的倔强系数分别为k1和k2,则弹簧受到的弹性回复力为:F= -(k1+k2)x若使滑块右移x距离后放开,滑块便在此弹性回复力的作用下做简谐运动。
运动的微分方程为:式中m是滑块的质量,弹簧质量很小,可忽略不计。
令上述微分方程即为:其解为:(1—1)式中x0称为振幅,称为圆频率。
从(1—1)式还可以看到,每增加时,滑块运动经过一周又回到原处。
滑块运动一周所需时间叫做周期,通常用T 表示,而且(1—2)由此可见如果弹簧的倔强系数k1、k2和滑块的质量m改变,则周期T也会随着改变。
在上面的讨论中,我们假定滑块与导轨平面间的摩擦阻力及周围空气的阻力很小,可以忽略不计。
实际上阻力总是存在的,因此滑块振动足够长时间后,最终仍然会停止在平衡位置。
所以严格说来,滑块的运动是一种振幅逐渐减小的阻尼振动,但是由于振幅衰减得较慢,在较短的时间内可近似地把它看作简谐运动。
本实验用数字秒表计时。
气轨上简谐振动测弹簧劲度系数一、实验目的1、巩固对气垫导轨的使用。
2、观察简谐振动的运动学特征。
3、学习通过实验总结出物理规律的基本方法,并总结出弹簧劲度系数。
二、 实验原理由于气垫导轨可以提供近乎零摩擦的实验条件,在研究简谐振动时,只要考虑粘滞阻力就可以得到接近实际情况的振动。
利用气轨上的简谐振动来测量弹簧的劲度系数,在良好实验条件的保证下,可以进一步减小实验误差。
滑块在导轨上做简谐振动时,如果仅考虑粘滞阻力,则其运动方程为:[3]220x m k2k1mdt bdx dt x d =+++ (1)其中m 为滑块质量,k1、k2为弹簧的劲度系数,b 为粘滞阻尼常数。
方程的解为:)cos(2a t Ae x t mb+=ω (2)其中振幅A 、初相a 由初始条件决定。
2)2()21(m bm k k -+=ω (3)圆频率T πω2=(4)在实验中我们取两根相同的弹簧,故k1=k1=K所以2)2()2(m bm k -=ω (5)由(4)(5)得22222T m m b k π+=而t mbAeA 21=随指数衰减,所以nT A A nT m b ]1[0ln2= 其中式0A 为t=0时的振幅,nT A 为n 个周期后的振幅22022ln 2T m A A nT m k nT π+= (6)三、 实验仪器气垫导轨及附件、气源、两根相同的弹簧、滑块、物理天平、计时计数测速仪等,MUJ-ⅢA 计时计数测速仪.四、 实验内容及步骤(1)调节气垫导轨水平(2)在滑块上安装遮光片(单片),在导轨上连接滑块与弹簧。
(3)将计时计数仪调到周期档,光电门放到平衡位置,确定振幅0A ,让滑块振动。
记录10 个周期的时间。
(4)将计时计数仪调到计数档,光电门放到距平衡位置x 处,即x A nT =,让滑块振动,直到滑块不经过光电门时记录下计时计数仪的示数从2/,N n N =。
(5)用物理天平测量滑块的质量。
(6)重复(3)、(4)、(5)五次。
实验报告姓名:班级:学号:实验成绩:同组姓名:实验日期:08.02.25 指导教师:助教17 批阅日期:简谐振动的研究【实验目的】1.观察简谐振动的现象;2.测定弹簧的倔强系数;3.测定振动周期T随振子质量变化的情况;4.学习使用气垫导轨、焦利氏秤和计时仪器;5.测定弹簧的有效质量【实验原理】1、胡克定律在弹性限度内,弹簧的伸长量x与其所受的拉力F成正比,这就是胡克定律:比例系数k称为弹簧的倔强系数.在本实验中k可以由焦利氏秤测得。
2、弹簧振子的简谐运动方程本实验中所用的是倔强系数分别为k1和k2的弹簧,k1和k2分别由焦利氏秤测得.k1和k2联结在一个质量为M的物体上,它们在光滑的水平气垫导轨上作简谐振动,弹簧的另外两端是固定在气垫导轨上.记M的平衡位置为坐标原点,该点x = 0.如果忽略阻尼和弹簧质量,则当M距平衡位置为x时,只受弹性恢复力k1x和k2x的作用,根据牛顿第二定律,其运动方程为:方程的解为:其中是振动系统的固有角频率,A是振幅,j 0是初位相.w 0由系统本身决定,也称固有频率,A和 f 0 由初始条件决定.系统的固有周期本实验通过改变M测出相应的T,用以考察T与M的关系.3、弹簧质量的影响当弹簧的质量不可忽略时,振子的有效质量为振动物体的质量与弹簧有效质量的和,振动系统的角频率可记作m0为弹簧的有效质量,在数值上等于弹簧质量的三分之一.实验要求测定弹簧的倔强系数,并测定振动周期T随振子质量和振幅m变化的情况。
4、简谐振动的机械能k=m /【实验数据记录、实验结果计算】1.利用焦利氏秤测量弹簧的倔强系数由可得作1号弹簧的关于m的图像:Linear Regression for Data1_B:Y = A + B * XParameter Value Error------------------------------------------------------------A 4.50311 0.00584B 0.21389 2.63837E-4------------------------------------------------------------ R SD N P------------------------------------------------------------ 1 0.0097 7 <0.0001------------------------------------------------------------转换单位有:得=4.58N/m作弹簧2的关于m的图像:Linear Regression for Data1_B:Y = A + B * XParameter Value Error------------------------------------------------------------A 10.87357 0.01838B 0.43555 8.29908E-4------------------------------------------------------------ R SD N P------------------------------------------------------------ 0.99999 0.0305 7 <0.0001------------------------------------------------------------转换单位有:得=2.2500N/m作弹簧3的的关于m的图像:Linear Regression for Data1_B:Y = A + B * XParameter Value Error------------------------------------------------------------A 13.66211 0.0102B 0.41766 4.6082E-4------------------------------------------------------------ R SD N P------------------------------------------------------------ 1 0.01694 7 <0.0001------------------------------------------------------------转换单位有:得=2.34641N/m2.振子质量M与振动周期T的关系◆气垫导轨水平情况:由简谐振动的周期公式:可得做M关于的图像:Linear Regression for DATA1_B:Y = A + B * XParameter Value Error------------------------------------------------------------A -23.8557 0.28672B 177.80393 0.24915------------------------------------------------------------R SD N P------------------------------------------------------------1 0.02929 6 <0.0001------------------------------------------------------------直线斜率为177.8557(g/)有由1中测得的数据: 有相对误差为:2.767%◆气垫导轨倾斜情况由简谐振动的周期公式:可得做M 关于的图像:Linear Regression for Data1_B:Y = A + B * XParameter Value Error------------------------------------------------------------A -23.9565 0.14842B 178.01894 0.12907------------------------------------------------------------ R SD N P------------------------------------------------------------1 0.01516 6 <0.0001------------------------------------------------------------直线斜率为177.8557(g/)由1中测得的数据:相对误差为:2.900%作振幅与周期的关系图:Linear Regression through origin for DATA1_B:Y = B * XParameter Value Error------------------------------------------------------------A 0 --B 0.04795 0.01046------------------------------------------------------------R SD N P------------------------------------------------------------0.46088 0.49897 6 <0.0001------------------------------------------------------------ Linear Regression for DATA1_B:Y = A + B * XParameter Value Error------------------------------------------------------------A 1.03869 1.61766E-4B 8.62857E-6 8.30756E-6------------------------------------------------------------ R SD N P------------------------------------------------------------0.46088 1.73765E-4 6 0.35763------------------------------------------------------------不过点的直线拟合斜率为 8.62857E-6 s/cm相关系数 r=0.46088。
气轨上弹簧振子的简谐振动
目的要求:
(1)用实验方法考察弹簧振子的振动周期与系统参量的关系并测定弹簧的劲度系数和有效质量。
(2)观测简谐振动的运动学特征。
(3)测量简谐振动的机械能。
仪器用具:
气轨(自带米尺,2m,1mm),弹簧两个,滑块,骑码,挡光刀片,光电计时器,电子天平(0.01g),游标卡尺(0.05mm),螺丝刀。
实验原理:
(一)弹簧振子的简谐运动过程:
质量为 m1的质点由两个弹簧与连接,弹簧的劲度系数分别
为k1和 k2,如下图所示:
当 m1偏离平衡位置 x时,所受到的弹簧力合力为
令 k=,并用牛顿第二定律写出方程
解得
X=Asin()
即其作简谐运动,其中
在上式中,是振动系统的固有角频率,是由系统本身决定的。
m=m 1+m0是振动系统的有效质量, m 0是弹簧的有效质量,A是振幅,是初相位,A和由起始条件决定。
系统的振动周期为
通过改变测量相应的 T,考察 T 和的关系,最小二乘法线性拟合求出 k
和
(二)简谐振动的运动学特征:
将()对 t 求微分
)
可见振子的运动速度 v 的变化关系也是一个简谐运动,角频率为,振幅为,而且 v 的相位比 x 超前 . 消去 t,得
v2=v02(v2−v2)
x=A时,v=0,x=0 时,v 的数值最大,即
实验中测量 x和 v 随时间的变化规律及 x和 v 之间的相位关系。
从上述关系可得
(三)简谐振动的机械能:
振动动能为
系统的弹性势能为
则系统的机械能
式中:k 和 A均不随时间变化。
上式说明机械能守恒,本实验通过测定不同
位置 x上 m 1的运动速度 v,从而求得和,观测它们之间的相互转换并验证机械能守恒定律。
(四)实验装置:
1.气轨设备及速度测量
实验室所用气轨由一根约 2m 长的三角形铝材做成,气轨的一端堵死,另
一端送入压缩空气,气轨的两个方向上侧面各钻有两排小孔,空气从小孔喷出。
把用合金铝做成的滑块放在气轨的两个喷气侧面上,滑块的表面经过精加工与
这两个侧面精确吻合,滑块与气轨之间就会形成一层很薄的气垫,使滑块漂浮在气垫上,因此滑块受到的摩擦力很小。
为使气轨水平,需使滑块在气轨上做匀速运动,需使气轨有一个合适的倾角。
本实验用光电计时器记时,配合U型挡光刀片可以较精确地测量滑块在某一位置的速度。
固定在滑块上的U型挡光刀片迅速通过光电门时,光电计时器测量两次挡光的时间间隔δt,用游标卡尺测量U型挡光刀片上挡光的两边间距δs,则滑块在该位置的速度为v=δs
δt
2.周期测量
在水平的气垫导轨上,两个相同的弹簧中间连接一滑块做往返运动,由于空气阻尼及其他能量损耗很小,可近似看作是简谐运动,滑块上装有平板型挡光刀片,用来测量周期。
在滑块处于平衡位置时,把光电门的光束对准挡光刀片的中心位置。
用光电计时器测量平板型挡光片第一次到第三次挡光之间的时间间隔,这便是滑块的振动周期 T。
实验步骤:
(1)测量弹簧振子的振动周期并考察振动周期和振幅的关系。
滑块振动的振幅 A分别取10.0,20.0,30.0,40.0 cm时测量其相应的周期,每一振幅周期测量 6 次。
(2)研究振动周期和振子质量之间的关系。
用电子天平分别测量滑块和各个骑码的质量。
在滑块上加骑码,对一个确定的振幅(取A=40.0 cm)每增加一个骑码测量一组 T,个数同(1),作图,用最小二乘法作线性拟合,斜率为,截距为,求出弹簧的倔强系数和有效质量。
(3)验证机械能守恒。
取一组滑块和骑码的组合,及A= 40.00cm,将平板型挡光刀片换为U型挡光刀片,调整光电门的位置,测量不同位置x处的挡光时间间隔δt,用游标卡尺测量挡光边的间距δs,得出速度v,利用(2)中测量的滑块和骑码的质量计算机械能的值并比较。
(从平衡位置到初始位置之间取5-7 个点,包含平衡位置。
)
实验数据:
1.弹簧振子的振动周期与振幅的关系:
2.弹簧振子的振动周期与振子质量的关系
3.验证振动系统的机械能守恒
A=40.0cm,v1=659.51v
(1)从平衡位置左侧释放,δs=10.00mm
数据处理:
1.振幅T与周期A的关系图如下,可见随振幅的增大,周期也在不断增大。
由于滑块在运动过程中有空气阻力,实际的运动为阻尼振动,满足T随A 增大而增大的关系。
2.v2和v1的关系图如下:
设图中直线为 y=a0+a1x,计算得:
4v2 v =v
1
=vv
̅̅̅̅̅̅−v̅̅̅v̅̅̅
v2
̅̅̅̅̅−(v̅̅̅)2
=9.3415v2vv
⁄
k=4.2384
kg
v2
⁄v v=
0.0004kg
v2
⁄
4v2 v v0=v
=v̅̅̅−v1v̅̅̅=0.062383v2v0=6.6974g
v v
=0.0002v
相关系数 r=0.9999998
综上,
k±v v=(4.2384±0.0004) kg v2
⁄
v0±v v
=(6.6974±0.0002)g
3.验证机械能守恒
x(cm) 0 5.0 10.0 15.0 20.0 25.0 30.0 v(m/s)(左) 1.000 0.9940 0.9756 0.9381 0.8780 0.7968 0.6821 v(m/s)(右) 1.000 0.9980 0.9766 0.9390 0.8772 0.7994 0.6821
v̅̅̅(v/v) 1.000 0.9960 0.9769 0.9386 0.8776 0.7981 0.6821
机械能E=1(v+v)v̅̅̅2+1vv2
E̅=0.340J v v=0.004J 相对误差v
v E =1%
由此可见空气阻力等因素对实验的影响不大,弹簧振子系统机械能守恒。
思考题:
(1)需要把气轨调水平。
虽然周期和气轨水平没有关系,但考虑到要测量
机械能守恒,而机械能中的重力势能的改变是无法测量的,所以必须使其水平
使实验中没有重力势能的改变。
(2)措施:
1. 每一振幅周期测量 6 次,且平衡位置左右各释放 3 次。
2. 测周期时光电门位置为平衡点,考虑到滑块中的挡板的宽度,所以左右释
放时,要注意调整光电门的位置。
在验证机械能的守恒时,测量速度 v 时也是如此。
3.在验证机械能的守恒时,为确定某一点的位置,应用光电门的微移来确定。
4.在测量速度时,只测量 1/4 个周期的,防止因为阻尼速度过量衰减。