汽车振动练习题
- 格式:doc
- 大小:463.03 KB
- 文档页数:17

1.1试举出振动设计'系统识别和环境预测的实例。
1.2如果把双轴汽车的质量分别离散到前、后轴上去,在考虑悬架质量和非悬架质量两个离散质量的情况下,画出前轴或后轴垂直振动的振动模型简图,并指出在这种化简情况下,汽车振动有几个自由度?1.3设有两个刚度分别为心,心的线性弹簧如图T-1.3所示,试证明:1)它们并联时的总刚度k eq为:k eq = k x+ k22)它们串联时的总刚度匕满足:丿-畔+ 土keq & k2解:1)对系统施加力P,则两个弹簧的变形相同为X,但受力不同,分别为: P x = k x x<由力的平衡有:P = ^ + P,=(k1+k2)xp故等效刚度为:k eq^- = k1+k2x2)对系统施加力P,则两个弹簧的变形为:P%i=r 111,弹簧的总变形为:x = x}+x2= P(——I ---- )故等效刚度为:k =—Xk x k2k,2+ k、1 1=—l-------k、k21.4求图所示扭转系统的总刚度。
两个串联的轴的扭转刚度分别为心, 解:对系统施加扭矩T,则两轴的转角为:VTrx系统的总转角为:0 = G + g = Hy- + T-)褊k,i故等效刚度为:犒=二+二1.5两只减振器的粘性阻尼系数分别为q, C2,试计算总粘性阻尼系数"在两只减振器并联时,2)在两只减振器串联时。
解:1)对系统施加力P,则两个减振器的速度同为厂受力分别为:P{ - c x x<P2=C2X由力的平衡有:P=£ + E =(q+C2)Xp故等效刚度为:c eq=- = c]+c2X2)对系统施加力P,则两个减振器的速度为:p 1 1故等效刚度为:c eq=- = - + -1.6 一简谐运动,振幅为0. 5cm,周期为0.15s,求最大速度和加速度。
解:简谐运动的a>n= — = /5),振幅为5x10 3m ;= 5x10-cos(^_ 2/r即:—5x10'丽fsin(丽血/s)*610=(話讥。
判断题1、系统作与激振力同频率的简谐振动,振幅决定于激振力的幅值、频率以及系统本身的物理特性。
A.对2、当初始条件为零,即==0时,系统不会有自由振动项。
A.错3、隔振系统的阻尼愈大,则隔振效果愈好。
A.对4、任何系统只有当所有自由度上的位移均为零时,系统的势能才可能为零。
B.错5、对于多自由度无阻尼线性系统,其任何可能的自由振动都可以被描述为模态运动的线性组合。
对6、一个周期激振力作用到单自由度线性系统上,系统响应的波形与激振力的波形相同,只是两波形间有一定的相位差。
错7、单自由度线性无阻尼系统的自由振动频率由系统的参数确定,与初始条件无关。
对8、多自由度振动系统的运动微分方程组中,各运动方程间的耦合,并不是振动系统的固有性质,而只是广义坐标选用的结果。
对9、无阻尼振动的固有频率只与质量和刚度有关,是系统的固有特性,与外界初始激励(初始条件)无关。
对10、对数衰减系数可以用来求阻尼比。
() A.对11、单自由度系统在简谐激励力作用下,系统将产生一个与激励力相同频率的简谐振动,但滞后一个相角。
A.对12、线性系统内各个激励产生的响应是互不影响的。
A.对13、两个同频率的简谐振动在同方向的合成运动是该频率的简谐振动。
A.对14、简谐振动的加速度,其大小与位移呈正比,而方向与位移相反,始终指向平衡位置。
A.对15、所有表示周期振动的周期函数都可以展开成Fourier级数的形式。
B.错16、广义坐标必须能完整地描述系统的运动。
A.对17、在欠阻尼和过阻尼的情况下,运动都将衰减为零。
()对18、对于无阻尼系统,速度超前位移90度。
() A.对19、瑞利法的基础是能量守恒定律。
()A.对20、有阻尼系统自由振动的频率有可能是零。
()A.对21、有阻尼系统自由振动的频率有时大于无阻尼系统的固定频率。
() A.对22、能量守恒定律可用于推导有阻尼系统和无阻尼系统的运动微分方程。
()A.对23、当质量块在垂直方向振动时,推导运动微分微分方程时都可以不计重力。
判断题1、系统作与激振力同频率的简谐振动,振幅决定于激振力的幅值、频率以及系统本身的物理特性。
A.对2、当初始条件为零,即==0时,系统不会有自由振动项。
A.错3、隔振系统的阻尼愈大,则隔振效果愈好。
A.对4、任何系统只有当所有自由度上的位移均为零时,系统的势能才可能为零。
B.错5、对于多自由度无阻尼线性系统,其任何可能的自由振动都可以被描述为模态运动的线性组合。
对6、一个周期激振力作用到单自由度线性系统上,系统响应的波形与激振力的波形相同,只是两波形间有一定的相位差。
错7、单自由度线性无阻尼系统的自由振动频率由系统的参数确定,与初始条件无关。
对8、多自由度振动系统的运动微分方程组中,各运动方程间的耦合,并不是振动系统的固有性质,而只是广义坐标选用的结果。
对9、无阻尼振动的固有频率只与质量和刚度有关,是系统的固有特性,与外界初始激励(初始条件)无关。
对10、对数衰减系数可以用来求阻尼比。
() A.对11、单自由度系统在简谐激励力作用下,系统将产生一个与激励力相同频率的简谐振动,但滞后一个相角。
A.对12、线性系统内各个激励产生的响应是互不影响的。
A.对13、两个同频率的简谐振动在同方向的合成运动是该频率的简谐振动。
A.对14、简谐振动的加速度,其大小与位移呈正比,而方向与位移相反,始终指向平衡位置。
A.对15、所有表示周期振动的周期函数都可以展开成Fourier级数的形式。
B.错16、广义坐标必须能完整地描述系统的运动。
A.对17、在欠阻尼和过阻尼的情况下,运动都将衰减为零。
()对18、对于无阻尼系统,速度超前位移90度。
() A.对19、瑞利法的基础是能量守恒定律。
() A.对20、有阻尼系统自由振动的频率有可能是零。
() A.对21、有阻尼系统自由振动的频率有时大于无阻尼系统的固定频率。
() A.对22、能量守恒定律可用于推导有阻尼系统和无阻尼系统的运动微分方程。
()A.对23、当质量块在垂直方向振动时,推导运动微分微分方程时都可以不计重力。
汽车振动分析解析习题三引言汽车振动是指汽车行驶过程中由于道路不平整、发动机工作不平稳等因素引起的车辆部件的振动现象。
对汽车的振动进行分析解析,不仅可以帮助我们了解振动现象的成因和特性,还可以为汽车设计和优化提供参考。
本文将介绍汽车振动分析解析的习题三,包括问题描述、求解过程和最终结果。
问题描述一辆汽车行驶在一条水平道路上,假设汽车的质量为m,发动机输出功率为P,行驶速度为v。
已知汽车的弹簧刚度为k,阻尼常数为c。
现在要求分析汽车的振动情况。
求解过程步骤一:建立力学模型由于汽车行驶过程中存在许多力的作用,为了简化问题,我们可以将汽车视为一个单自由度弹簧振子模型。
汽车的质量可以视为振子的质量,弹簧刚度和阻尼常数可以视为振子的弹簧刚度和阻尼常数。
步骤二:列出振动方程根据单自由度振子的运动方程,可以得到汽车振动的微分方程为:m * x'' + c * x' + k * x = F(t)其中,m为振子的质量,x为振子的位移,c为振子的阻尼常数,k为振子的弹簧刚度,F(t)为外力的作用。
在本问题中,外力即为汽车产生的振动力。
步骤三:求解振动方程根据振动方程,我们可以求解该微分方程并得到振动的解析解。
由于本问题涉及到汽车行驶的情况,我们需要考虑发动机的工作状态和道路的不平整程度。
步骤四:分析振动情况通过解析解,我们可以对汽车的振动情况进行分析。
可以研究振动的频率、振幅、相位等特性,并与实际情况进行比较。
通过分析振动情况,可以了解振动的成因,进一步优化汽车的设计和改善行驶舒适性。
最终结果通过以上求解过程和振动分析,我们可以得知汽车振动的特性,并进行进一步的优化和改进。
同时,我们也能更好地了解汽车行驶过程中振动的成因,为汽车的设计和行驶舒适性提供参考。
总结本文介绍了汽车振动分析解析的习题三,包括问题描述、求解过程和最终结果。
通过分析汽车的振动情况,我们可以更好地了解振动的成因和特性,并为汽车的设计和优化提供参考。
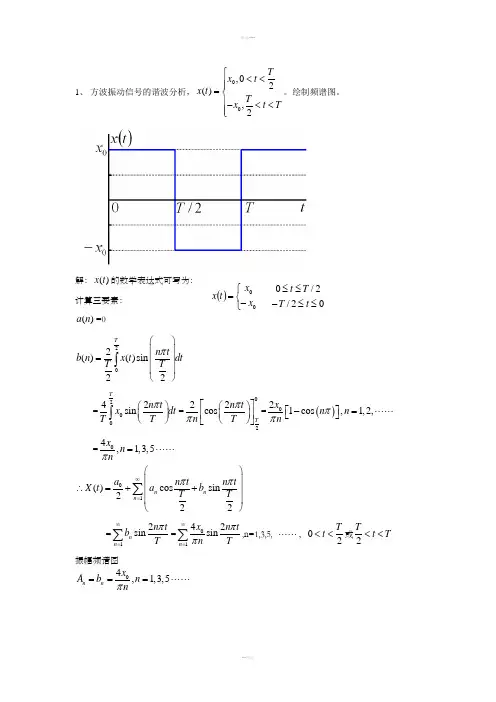
1、 方波振动信号的谐波分析,00,02(),2T x t x t T x t T⎧<<⎪⎪=⎨⎪-<<⎪⎩。
绘制频谱图。
解:()x t 的数学表达式可写为: 计算三要素:()a n =0202()()sin 22Tn t b n x t dt T T π⎛⎫ ⎪= ⎪⎪⎝⎭⎰=20042sin Tn t x dt T T π⎛⎫ ⎪⎝⎭⎰=0222cos T n t n T ππ⎡⎤⎛⎫ ⎪⎢⎥⎝⎭⎣⎦=()021cos ,1,2,x n n n ππ-=⋅⋅⋅⋅⋅⋅⎡⎤⎣⎦ =4,1,3,5x n nπ=⋅⋅⋅⋅⋅⋅ 01()cos sin 222n n n a n t n t X t a b T T ππ∞=⎛⎫ ⎪∴=++ ⎪ ⎪⎝⎭∑=12sin n n n t b T π∞=∑=0142sin n x n t nT ππ∞=∑,n=1,3,5, ⋅⋅⋅⋅⋅⋅,02T t <<或2Tt T <<振幅频谱图4,1,3,5n n x A b n nπ===⋅⋅⋅⋅⋅⋅ ()⎩⎨⎧≤≤-≤≤-=02/2/00t T T t x x t x相位频谱图1tan 0,1,3,5nn n a n b φ-⎛⎫===⋅⋅⋅⋅⋅⋅⎪⎝⎭2、 求周期性矩形脉冲波的复数形式的傅立叶级数,绘频谱图。
解: 数学表达式:计算三要素:傅立叶级数复数形式:频谱图0000,0sin ,0,n x t n TA x n t n n n T ππ⎧=⎪⎪=⎨⎪≠-∞<<∞⎪⎩()⎪⎪⎪⎩⎪⎪⎪⎨⎧≤≤≤≤--≤≤-=220222200000T t t t t t x t t T t x 偶函数 T x t a 0002=2sin 2010tn n x a n ωπ⋅=0=n b 2sin 22010tn n x a ib a X n n nn ωπ⋅==-=()2sin 1101012/2/02/2/102/2/02/2/010********t n n x tin e e T x t in e T x dt e x T dt e t x T X t in t in t t t in t in t t tin T T n ωπωωωωωωω⋅=--⋅=-⋅=⋅⋅=⋅⋅=-------⎰⎰T t x t n n x X n 00010002sinlim =⋅=→ωπ()∑∑∞-∞=∞-∞===n tin n t in n e n t n x e X t x 112sin 010ωωωπ2.1解:(1)能量法222341222111()()222e a a k x k x k x a a += 2232122244e a a k k k a a ∴=+(2)能量法222 (1214)111222e a m x m x m x a ⎛⎫+= ⎪⎝⎭212124e a m m m a ∴=+(3)固有频率222132224211e e k a k a k p m a m a m +==+2.3解:平衡位置系统受力如图 则122,2F G F G == 弹簧1k 变形112G x k =,弹簧变形222Gx k =,且m 静位移1222x x x =+ 12124422e G G Gx x x k k k ∴==+=+ ()1212,4e e k k k m m k k ∴==+∴固有圆频率()121212e e k k k p m k k m==+2.5解对数衰减率:111110ln ln 0.06920 2.5j A j A δ+=== 相对阻尼系数:22110.01122110.069ζππδ===⎛⎫⎛⎫++ ⎪ ⎪⎝⎭⎝⎭衰减系数:9.80.0110.3140.012n k g n ms ζωζζ===== 阻尼系数:220.3149 5.652(/)c nm N s m ==⨯⨯= 临界阻尼: 5.652513.8(/)0.011c cc N s m ζ=== 2.7解受力分析如图-xs ’)单自由度振动系统振动微分方程()2022s sn n n smx c x x kx mx cx kx cx x x x x ζωωζω+-+=∴++=∴++=设iwtcs x e =,则()c cs x H x ω=22222()212n n n i iH i iζωωζλωωωζωωλζλ∴==-+-+()H ω=,相位差角:122tan ()12ζλπϕλ-=--()()()()()i iwt i wt s x t H x t H e ae ϕϕωω--===()0sin )s x a t x t t ωωϕ=∴=-Xa =其中,n ωλω==ζ= 2.8 解:1、 系统的振动微分方程为:0=⎪⎭⎫ ⎝⎛-+++•••s x x k kx x c x m即:s kx kx x c x m =++2激励函数为:()T t t Tdk kx s ≤≤=0 傅立叶级数三要素:kd tdt T dk T a T ==⎰002()0cos 20=⋅=⎰dt nwt t T dk T a T n()πn kd dt nwt t T d k T b T n -=⋅=⎰sin 20所以,激励函数的前四项为:()()()∑=⋅+⋅+=41sin cos 2n n n s t n b t n a a kx ωω)4sin 413sin 312sin 21(sin 2wt wt wt wt d k d k+++-=π 系统稳态响应的前三项为:])6()91(3)3sin()4()41(2)2sin()2()1()sin([24)2()1(2)sin(4222322222221312222ζλλψζλλψζλλψπλζλψ+--++--++---=+--+=∑=wt wt wt dd n n k nwt b d x n n n 其中3,2,1,12arctan22=-=n n n n λλζψ2.9 解:运用杜哈美积分法())]03.0sin()02.0(sin(50)03.0cos()02.0cos(5.0[)03.0sin()03.0(sin )(1)03.0sin(03.0)];01.0sin(50)01.0cos(5.0[)01.0sin()01.0(sin )50(1)01.0sin(01.0);01.00(50)(;)(sin )(1sin )(sin )(1sin )/(cos 20001.0020001.00000000000.0p p p p p mpF p p d p f mp p p x s t p p p mp F p pd p F F mpp px s t t t F F t f d t p f mppt p d t p f mp pt p x pt x t t t ---+=-+==+-+=--+==≤≤-=-+=-+⎪⎭⎫ ⎝⎛+=⎰⎰⎰⎰υτττυυτττυτττυτττχ时,当时,当4.1解直接法()11121221111221222213222212320()0()0()0m x k k x k x m x k x k x x m x k x x k x m x k x k k x ++-=⎧+--=⎧⎪⇒⎨⎨+-+=-++=⎪⎩⎩122111223222000k k k m x x k k k m x x +-⎡⎤⎡⎤⎡⎤⎡⎤∴+=⎢⎥⎢⎥⎢⎥⎢⎥-+⎣⎦⎣⎦⎣⎦⎣⎦其中,122223k k k K k k k +-⎡⎤=⎢⎥-+⎣⎦拉格朗日法系统为无阻尼自由振动系统,拉格朗日方程形式为:0ii id TT Udt q q q δδδδδδ⎛⎫-+= ⎪⎝⎭ 广义坐标为:12,x x2211221122T m x m x =+ 0,1,2iTi x δδ== 111111,T d T m x m x x dt x δδδδ⎛⎫== ⎪⎝⎭222222,T d T m x m x x dt x δδδδ⎛⎫== ⎪⎝⎭()2221122132111222U k x k x x k x =+-+ 112212213212(),()U U k x k x x k x x k x x x δδδδ=--=-+ ∴()11121221111221222213222212320()0()0()0m x k k x k x m x k x k x x m x k x x k x m x k x k k x ++-=⎧+--=⎧⎪⇒⎨⎨+-+=-++=⎪⎩⎩影响系数法令121,0x x ==11112112k k x k x k k =+=+ 2112212k k k x k ==-=-令120,1x x ==22223223k k x k x k k =+=+122223k k k K k k k +-⎡⎤∴=⎢⎥-+⎣⎦4.2解:直接法∴111213311113112332212123222111222333232331333122233()()0()0()()0()0()()0()0J k r k r J k r k r k r k r J k r k r J k r k r k r k r J k r k r J k r k r k r k r θθθθθθθθθθθθθθθθθθθθθθθθθθθ⎧⎧----=++--=⎪⎪+---=⇒-++-=⎨⎨⎪⎪+-+-=--++=⎩⎩ ∴12300100000100001J M J J J ⎡⎤⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦131311223223211121112k r k rk r k r K k rk r k r k r kr k rk rk r k r +----⎡⎤⎡⎤⎢⎥⎢⎥=-+-=--⎢⎥⎢⎥⎢⎥⎢⎥--+--⎣⎦⎣⎦4.3解a,1234mmMmm⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦,1222233334444k k kk k k kKk k k kk k+-⎡⎤⎢⎥-+-⎢⎥=⎢⎥-+-⎢⎥-⎢⎥⎣⎦b,1234mmMmm⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦,222233334444k kk k k kKk k k kk k-⎡⎤⎢⎥-+-⎢⎥=⎢⎥-+-⎢⎥-⎢⎥⎣⎦c,1234mmMmm⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎣⎦,12222333344443k k kk k k kKk k k kk k k+-⎡⎤⎢⎥-+-⎢⎥=⎢⎥-+-⎢⎥-+⎢⎥⎣⎦4.4解:质心位于距左端34l处0324l m xdx mllx lm⎛⎫+⎪==⎪⎪⎝⎭⎰令1,0xθ==11211223442 k kx kx kl kl k k kx kx l=+===-=-令0x=,1θ=22233544448l l k k k l l kl θθ=+= ∴刚度矩阵为,222528kl kK kl kl ⎡⎤-⎢⎥=⎢⎥⎢⎥-⎢⎥⎣⎦令1,0x θ==1122m mx m ∴==21120m m ==令0,1x θ==222524m I ml θ==,3222445()424ll m l I x dx m ml l -=+=⎰∴质量矩阵为,2205024mM ml ⎡⎤⎢⎥=⎢⎥⎣⎦22202205502428kl mk x x klml kl θθ⎡⎤-⎡⎤⎢⎥⎡⎤⎡⎤⎢⎥∴+=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥-⎣⎦⎢⎥⎣⎦特征矩阵为,22222222552824n n nkl k m H K M kl kl ml ωωω⎡⎤--⎢⎥=-=⎢⎥⎢⎥--⎢⎥⎣⎦将20n H K M ω=-=整理为,22422221440335n n m ll km k l ωω-+=求得特征值为,2120.735k k m m ω⎛=≈ ⎝,222 3.265k k mm ω⎛=+≈ ⎝ 2n H K M ω=-的伴随阵,2222558242222n n kl kl ml adjH kl k m ωω⎡⎤-⎢⎥=⎢⎥⎢⎥-⎢⎥⎣⎦将22120.735, 3.265k km mωω==代入 得对应特征向量,1211,1.0599.06A A l l ⎡⎤⎡⎤⎢⎥⎢⎥==-⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦则主振型矩阵为,111.0599.06A l l ⎡⎤⎢⎥=-⎢⎥⎢⎥⎣⎦模态质量矩阵为21111201.0599.06 1.0599.065024TT P mM A MA ml l l l l ⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥==--⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦2.2340019.1mm ⎡⎤=⎢⎥⎣⎦模态刚度矩阵为21111221.0599.06 1.0599.06528TT P kl k K A KA kl kl l l l l ⎡⎤-⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥==⎢⎥--⎢⎥⎢⎥⎢⎥-⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎣⎦1.6420062.362kk ⎡⎤=⎢⎥⎣⎦归一化因子为,i α==∴归一化因子方阵,0.669000.229R ⎤=⎥⎦ ∴正则振型矩阵为,110.6690.2290.66901.0599.060.708 2.07500.229N A AR ll l l ⎡⎤⎡⎤⎡⎤⎢⎥⎥===--⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥⎢⎥⎣⎦⎦正则模态质量矩阵为,20.6690.2290.6690.229200.9990.0000.7082.0750.708 2.07550.000 1.002024TTN N N mM A MA ml ll l l ⎡⎤⎡⎤⎡⎤⎡⎤⎥⎥⎢===--⎢⎥⎢⎥⎢⎥⎢⎣⎦⎢⎥⎢⎥⎣⎦⎦正则模态刚度矩阵为,20.6690.2290.6690.22920.7340.00020.7082.0750.708 2.07550.0003.16528T TN N N kl kk K A KA kl m kl l l l l ⎡⎤-⎡⎤⎡⎤⎢⎥⎡⎤⎥⎥===⎢--⎢⎥⎢⎥⎢⎥⎣⎦⎢-⎢⎥⎢⎥⎦⎦⎢⎣⎦第一阶主振型示意图,1N 为节点1第二阶主振型示意图,2N 为节点1.265习题4.6解:(1)直接法,受力如图f f k mz)r r l ϕ2m ρϕ2()()0()()0r r f f r r r f f f mz k z l k z l m k z l l k z l l ϕϕρϕϕϕ+++-=⎧⎪⎨++--=⎪⎩222()()0()()0f r r r f f r r f f r r f f mz k k z k l k l m k l k l z k l k l ϕρϕϕ+++-=⎧⎪⇒⎨+-++=⎪⎩ 运动微分方程为222000f r r r f f r rf f r r f f k k k l k l mz z k l k lk l k l m ρϕϕ+-⎡⎤⎡⎤⎡⎤⎡⎤+=⎢⎥⎢⎥⎢⎥⎢⎥-+⎣⎦⎣⎦⎣⎦⎣⎦ 特征矩阵为222222f r r r f fr r f f r r f f k k m k l k l H K M k l k l k l k l m ωωωρ⎡⎤+--=-=⎢⎥-+-⎢⎥⎣⎦由20H K M ω=-=得()()2422222()0f r r r f f f r f r m k k m kl k l m k k l l ρωρω⎡⎤-+++++=⎣⎦21ω=22ω=H 的伴随矩阵22222r r f ff f r r f f r r f r k l k l m k l k l adjH k l k l k k m ωρω⎡⎤+--=⎢⎥-+-⎢⎥⎣⎦将固有频率21ω、22ω代入adjH ,得主振型:22(1)(2)1211,f r f r f f r r f f r r k k m k k m A A k l k l k l k l ωω⎡⎤⎡⎤⎢⎥⎢⎥+-+-==⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦(2)f f r r k l k l = 则运动微分方程变为22200000f r r r f f k k mz z k l k l m ρϕϕ+⎡⎤⎡⎤⎡⎤⎡⎤+=⎢⎥⎢⎥⎢⎥⎢⎥+⎣⎦⎣⎦⎣⎦⎣⎦ z自由度的固有频率为ω=ϕ自由度的固有频率为ω=两运动互不相关 (3)2f r l l ρ=()()21,22fr f f r r f f r rf rll k l k l k l k l ml l ω++±-=若f f r r k l k l >()()2212,f r rf r ffrl l k l l k ml ml ωω++==,(1)(2)111,1f r A A l l ⎡⎤⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥--⎢⎥⎢⎥⎣⎦⎣⎦若f f r r k l k l <()()2212,f r ff r rrfl l k l l k ml ml ωω++==,(1)(2)111,1f r A A l l ⎡⎤⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥--⎢⎥⎢⎥⎣⎦⎣⎦4.9柔度矩阵 F=1111122123k ⎡⎤⎢⎥⎢⎥⎢⎥⎣⎦刚度矩阵 K=1210121011F k --⎡⎤⎢⎥⎢⎥=--⎢⎥⎢⎥-⎣⎦质量矩阵 000000J M J J ⎡⎤⎢⎥=⎢⎥⎢⎥⎣⎦所以222362422322025600nn nn n n nk J kH K M k k J kJ J k Jk k kk J ωωωωωωω--=-=---=-+-+=--解得:2(1)2(2)2(3)0.2, 1.5, 3.2nn n k k k J J Jωωω===(1)(2)(3)N1111.80.5 1.22.240.750.441111.80.5 1.22.240.750.440.330.740.62A0.60.370.740.740.560.27P0.5TCpA A AA⎡⎤⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥===-⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎡⎤⎢⎥⎢⎥∴=-⎢⎥⎢⎥-⎣⎦∴⎡⎤⎢⎥⎢⎥=-⎢⎥⎢⎥-⎣⎦=对应主振型正则振型矩阵TN NPNiNi2Pi PiN0.67P A P0.11.5T sin t0.249.26000 1.81000 2.634.07k00K K00.75k0008.97kPXK M0.6XTP p PTp PJA MA JJA Aωω⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥∴==-⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎣⎦⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎣⎦=-∴=质量模态矩阵 M刚度模态矩阵简谐力作用下2222N N2274.07k9.26J0.110.75k1.81J0.248.97k 2.63J0.0094.07k9.26J0.539X=A X0.75k1.81J0.4938.97k 2.63Jωωωωωω⎡⎤⎢⎥-⎢⎥⎢⎥-⎢⎥-⎢⎥⎢⎥-⎢⎥⎢⎥-⎣⎦∴-⎡⎤⎢⎥-⎢⎥⎢⎥=⎢⎥-⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦物理坐标下位移响应4.102222(1)2(2)(1)(2)P TP P Pi Pi i i 0202202113,,A ,A 1111A 11Q 0P P A P Q 2Q X P (1cos t)/n nnnn m k k M K m kk k mk H K M kk mk k m m ωωωωωωω-⎡⎤⎡⎤==⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦--∴=-==--⎡⎤⎡⎤∴====⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎡⎤∴=⎢⎥⎢⎥-⎣⎦⎡⎤⎡⎤=∴==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦=-对应主振型由杜哈梅积分得2P 2P P 0m X 2k Q(1cos t)312mQ X A X (13k 1ω⎡⎤⎢⎥∴=⎢⎥-⎢⎥⎣⎦⎡⎤∴==-⎢⎥⎢⎥⎣⎦5.1 解:系统质量刚度矩阵分别为22,2m kk m k k k M K m kk k m kk -⎡⎤⎡⎤⎢⎥⎢⎥--⎢⎥⎢⎥==⎢⎥⎢⎥--⎢⎥⎢⎥-⎣⎦⎣⎦第一瑞丽商:假设21111112111112111,0.2;2211111222;1233123411,0.1234;22111112221,0.112331234TTTT A KA k A p A MA m A MA k p A MFMA m k p trD m⎡⎤⎢⎥⎢⎥===⎢⎥⎢⎥⎣⎦⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎡⎤⎢⎥⎢⎥===⎢⎥⎢⎥⎣⎦⎡⎤⎢⎥⎢⎥==⎢⎥⎢⎥⎣⎦1则第二瑞丽商:1系统柔度矩阵 F=k 假设 A 则邓克莱法:m D=FM=则k这三种方法中,第二瑞丽商精度最高,邓克莱法计算结果偏小。
机械振动单元测试题一、机械振动选择题1.公路上匀速行驶的货车受一扰动,车上货物随车厢底板上下振动但不脱离底板.一段时间内货物在竖直方向的振动可视为简谐运动,周期为T.取竖直向上为正方向,以t=0时刻作为计时起点,其振动图像如图所示,则A.t=14T时,货物对车厢底板的压力最大B.t=12T时,货物对车厢底板的压力最小C.t=34T时,货物对车厢底板的压力最大D.t=34T时,货物对车厢底板的压力最小2.如图所示的单摆,摆球a向右摆动到最低点时,恰好与一沿水平方向向左运动的粘性小球b发生碰撞,并粘在一起,且摆动平面不便.已知碰撞前a球摆动的最高点与最低点的高度差为h,摆动的周期为T,a球质量是b球质量的5倍,碰撞前a球在最低点的速度是b球速度的一半.则碰撞后A 5 6 TB 6 5 TC.摆球最高点与最低点的高度差为0.3hD.摆球最高点与最低点的高度差为0.25h3.如图为某简谐运动图象,若t=0时,质点正经过O点向b运动,则下列说法正确的是()A.质点在0.7 s时的位移方向向左,且正在远离平衡位置运动B.质点在1.5 s时的位移最大,方向向左,在1.75 s时,位移为1 cmC.质点在1.2 s到1.4 s过程中,质点的位移在增加,方向向左D.质点从1.6 s到1.8 s时间内,质点的位移正在增大,方向向右4.如图所示,一端固定于天花板上的一轻弹簧,下端悬挂了质量均为m的A、B两物体,平衡后剪断A、B间细线,此后A将做简谐运动。
已知弹簧的劲度系数为k,则下列说法中正确的是()A.细线剪断瞬间A的加速度为0B.A运动到最高点时弹簧弹力为mgC.A运动到最高点时,A的加速度为gD.A振动的振幅为2mg k5.下列叙述中符合物理学史实的是()A.伽利略发现了单摆的周期公式B.奥斯特发现了电流的磁效应C.库仑通过扭秤实验得出了万有引力定律D.牛顿通过斜面理想实验得出了维持运动不需要力的结论6.如图所示是扬声器纸盆中心做简谐运动的振动图象,下列判断正确的是A.t=2×10-3s时刻纸盆中心的速度最大B.t=3×10-3s时刻纸盆中心的加速度最大C.在0〜l×10-3s之间纸盆中心的速度方向与加速度方向相同D.纸盆中心做简谐运动的方程为x=1.5×10-4cos50πt(m)7.如图1所示,轻弹簧上端固定,下端悬吊一个钢球,把钢球从平衡位置向下拉下一段距离A,由静止释放。
一、选择题1.轿车的悬挂系统是由车身与轮胎间的弹簧及避震器组成的支持系统。
某型号轿车的“车身—悬挂系统”的固有周期是0.5s,这辆汽车匀速通过某路口的条状减速带,如图,已知相邻两条减速带间的距离为1.0m,该车经过该减速带过程中,下列说法正确的是()A.当轿车以30km/h的速度通过减速带时,车身上下振动的频率为2HzB.轿车通过减速带的速度大小不同,车身上下振动的幅度大小也必然不同C.轿车通过减速带的速度越大,车身上下颠簸得越剧烈D.当轿车以7.2km/h的速度通过减速带时,车身上下颠簸得最剧烈2.如图所示,弹簧振子在A、B之间做简谐运动.以平衡位置O为原点,建立Ox轴.向右为x轴的正方向.若振子位于B点时开始计时,则其振动图像为()A.B.C.D.3.如图所示,将小球甲、乙、丙(都可视为质点)分别从A、B、C三点由静止同时释放,最后都到达竖直面内圆弧的最低点D,其中甲是从圆心A出发做自由落体运动,乙沿弦轨道从一端B到达最低点D,丙沿圆弧轨道从C点运动到D,且C点很靠近D点,如果忽略一切摩擦阻力,那么下列判断正确的是()A.丙球最先到达D点,乙球最后到达D点B.甲球最先到达D点,乙球最后到达D点C.甲球最先到达D点,丙球最后到达D点D.甲球最先到达D点,无法判断哪个球最后到达D点4.如图所示为单摆在两次受迫振动中的共振曲线,下列说法正确的是()A.若两次受迫振动分别在月球上和地球上进行,且摆长相等,则图线II是月球上的单摆共振曲线B.图线II若是在地球表面上完成的,则该摆摆长约为2mC.若摆长约为1m,则图线I是在地球表面上完成的D.若两次受迫振动均在地球上同一地点进行的,则两次摆长之比为l1:l2 25:45.振动的单摆小球通过平衡位置时,关于小球受到的回复力、合力及加速度的说法中正确的是()A.回复力为零,合力也为零B.回复力不为零,方向沿轨迹的切线C.合力不为零,方向沿轨迹的切线D.合力不为零,加速度不为零,方向指向悬点6.如图1所示,轻弹簧下端固定在地上,上端连接一个钢球,把钢球从平衡位置向下压一段距离A,由静止释放。
一、选择题1.(0分)[ID :127373]轿车的悬挂系统是由车身与轮胎间的弹簧及避震器组成的支持系统。
某型号轿车的“车身—悬挂系统”的固有周期是0.5s ,这辆汽车匀速通过某路口的条状减速带,如图,已知相邻两条减速带间的距离为1.0m ,该车经过该减速带过程中,下列说法正确的是( )A .当轿车以30km/h 的速度通过减速带时,车身上下振动的频率为2HzB .轿车通过减速带的速度大小不同,车身上下振动的幅度大小也必然不同C .轿车通过减速带的速度越大,车身上下颠簸得越剧烈D .当轿车以7.2km/h 的速度通过减速带时,车身上下颠簸得最剧烈2.(0分)[ID :127365]如图所示,两长方体木块A 和B 叠放在光滑水平面上,质量分别为m 和M ,A 与B 之间的最大静摩擦力为0f ,B 与劲度系数为k 的水平轻质弹簧连接构成弹簧振子。
A 和B 在振动过程中始终不发生相对滑动,则( )A .A 受到B 的摩擦力f F 与B 离开平衡位置位移x 总满足f kmF x M m=-+ B .它们的最大加速度不能大于0f MC .它们的振幅不可能大于0kmf M m+D .振动过程中,AB 间的摩擦力对A 做正功,对B 做负功3.(0分)[ID :127361]如图所示,质量为1m 的物体A 放置在质量为2m 的物体B 上,B 与弹簧相连,它们一起在光滑水平面上做简谐运动,振动过程中A 、B 之间无相对运动,设弹簧劲度系数为k ,当物体离开平衡位置的位移为x 时,A 受到的回复力的大小等于( )A .0B .kxC .121m kx m m +D .12m kx m 4.(0分)[ID :127360]某弹簧振子如图所示,其中A 、B 均为振子偏离平衡位置的最大位移处,O 为平衡位置。
在振子由O 向A 运动的过程中,下列说法正确的是( )A .振子偏离平衡位置的位移方向向左B .振子偏离平衡位置的位移正在减小C .弹簧的弹性势能正在减小D .振子的速度正在减小5.(0分)[ID :127351]一弹簧振子做机械振动,若从平衡位置O 开始计时,经过0.3s 时,振子第一次经过P 点,又经过了0.2s ,振子第二次经过P 点,则从振子第二次经过P 点算起,该振子第三次经过P 点所需的时间为( ) A .4sB .8sC .33sD .1.4s6.(0分)[ID :127335]如图所示,水平方向的弹簧振子振动过程中,振子先后经过a 、b 两点时的速度相同,且从a 到b 历时0.2s ,从b 再回到a 的最短时间为0.4s ,aO bO =,c 、d 为振子最大位移处,则该振子的振动频率为( )A .1HzB .1.25HzC .2HzD .2.5Hz7.(0分)[ID :127320]如图,细绳一端固定于悬挂点O ,另一端系一小球.在悬挂点正下方A 点处钉一个钉子.小球从B 点由静止释放,摆到最低点C 的时间为t 1,从C 点向右摆到最高点的时间为t 2.摆动过程中,如果摆角始终小于5º,不计空气阻力.下列说法正确的是A .t 1= t 2,摆线碰钉子的瞬间,小球的速率变小B .t 1> t 2,摆线碰钉子的瞬间,小球的速率变小C .t 1> t 2,摆线碰钉子的瞬间,小球的速率不变D .t 1= t 2,摆线碰钉子的瞬间,小球的速率不变8.(0分)[ID :127313]甲、乙两个单摆在同一地点做简谐振动,在相等的时间内,甲完成10次全振动,乙完成20次全振动.已知甲摆摆长为1 m ,则乙摆的摆长为( ) A .2 m B .4 m C .0.5 mD .0.25 m9.(0分)[ID :127310]图(甲)所示为以O 点为平衡位置、在A 、B 两点间做简谐运动的弹簧振子,图(乙)为这个弹簧振子的振动图象,由图可知下列说法中正确的是( )A .在t =0.2s 时,弹簧振子可能运动到B 位置 B .在t =0.1s 与t =0.3s 两个时刻,弹簧振子的速度相同C .从t =0到t =0.2s 的时间内,弹簧振子的动能持续地增加D .在t =0.2s 与t =0.6s 两个时刻,弹簧振子的加速度相同10.(0分)[ID :127308]某质点作简谐运动的振动图象如图所示,则( )A .t =0.2s 时,质点速度方向沿x 正方向B .t =0.2s 时,质点加速度方向沿x 负方向C .0.2s-0.4s 内质点速度先减小后增大D .0.2s-0.4s 内质点加速度先增大后减小11.(0分)[ID :127304]一个做简谐运动的质点,它的振幅是5 cm,频率是2.5 Hz,该质点从平衡位置开始经过2.5 s 后,位移的大小和经过的路程为( ) A .5 cm 、12.5 cm B .5 cm 、125cm C .0、30cm D .0、125 cm12.(0分)[ID :127296]如图所示,弹簧的一端固定,另一端与质量为2m 的物体B 相连,质量为1m 的物体A 放在B 上,212m m =.A 、B 两物体一起在光滑水平面上的N 、N '之间做简谐运动,运动过程中A 、B 之间无相对运动,O 是平衡位置.已知当两物体运动到N '时,弹簧的弹性势能为p E ,则它们由N '运动到O 的过程中,摩擦力对A 所做的功等于( )A .p EB .12p E C .13p E D .14p E 二、填空题13.(0分)[ID :127488]①一根轻弹簧下端固定在水平地面上,质量为m 的物块(视为质点)静止于弹簧上端,此时弹簧的压缩量为x 。
判断题1、系统作与激振力同频率的简谐振动,振幅决定于激振力的幅值、频率以及系统本身的物理特性。
A.对2、当初始条件为零,即==0时,系统不会有自由振动项。
A.错3、隔振系统的阻尼愈大,则隔振效果愈好。
A.对4、任何系统只有当所有自由度上的位移均为零时,系统的势能才可能为零。
B.错5、对于多自由度无阻尼线性系统,其任何可能的自由振动都可以被描述为模态运动的线性组合。
对6、一个周期激振力作用到单自由度线性系统上,系统响应的波形与激振力的波形相同,只是两波形间有一定的相位差。
错7、单自由度线性无阻尼系统的自由振动频率由系统的参数确定,与初始条件无关。
对8、多自由度振动系统的运动微分方程组中,各运动方程间的耦合,并不是振动系统的固有性质,而只是广义坐标选用的结果。
对9、无阻尼振动的固有频率只与质量和刚度有关,是系统的固有特性,与外界初始激励(初始条件)无关。
对10、对数衰减系数可以用来求阻尼比。
() A.对11、单自由度系统在简谐激励力作用下,系统将产生一个与激励力相同频率的简谐振动,但滞后一个相角。
A.对12、线性系统内各个激励产生的响应是互不影响的。
A.对13、两个同频率的简谐振动在同方向的合成运动是该频率的简谐振动。
A.对14、简谐振动的加速度,其大小与位移呈正比,而方向与位移相反,始终指向平衡位置。
A.对15、所有表示周期振动的周期函数都可以展开成Fourier级数的形式。
B.错16、广义坐标必须能完整地描述系统的运动。
A.对17、在欠阻尼和过阻尼的情况下,运动都将衰减为零。
()对18、对于无阻尼系统,速度超前位移90度。
() A.对19、瑞利法的基础是能量守恒定律。
() A.对20、有阻尼系统自由振动的频率有可能是零。
() A.对21、有阻尼系统自由振动的频率有时大于无阻尼系统的固定频率。
() A.对22、能量守恒定律可用于推导有阻尼系统和无阻尼系统的运动微分方程。
()A.对23、当质量块在垂直方向振动时,推导运动微分微分方程时都可以不计重力。
振动习题例1:提升机系统重物重量N W 51047.1?=钢丝绳的弹簧刚度 cm N k /1078.54=重物以v=15m/s 的速度匀速下降时求:绳的上端突然被卡住时,(1)重物的振动频率,(2)钢丝绳中的最⼤张⼒。
解:振动频率s rad Wgk/6.190==ω重物匀速下降时处于静平衡位置,若将坐标原点取在绳被卡住瞬时重物所在位置则 t=0 时,有: 00=x v x =0&振动解:)()6.19sin(28.1)sin()(00cm t t vt x ==ωω )sin()cos()(0000t x t x t x ωωω&+=振动解: )( )6.19sin(28.1)sin()(00cm t t vt x ==ωω绳中的最⼤张⼒等于静张⼒与因振动引起的动张⼒之和:)(1021.21074.01047.1555max N kA W kA T T s ?=?+?=+=+=由于km v vkkA ==0ω为了减少振动引起的动张⼒,应当降低升降系统的刚度例2:重物落下,与简⽀梁做完全⾮弹性碰撞梁长 L ,抗弯刚度 EJ求:梁的⾃由振动频率和最⼤挠度解:取平衡位置以梁承受重物时的静平衡位置为坐标原点建⽴坐标系静变形λ由材料⼒学:EJ mgl 483=λ⾃由振动频率为:λωg =0348ml EJ=撞击时刻为零时刻,则 t=0 时,有:λ-=0xgh x 20=&则⾃由振动振幅为:20020???? ??+=ωx x A &λλh 22+=梁的最⼤扰度:λλ+=A max)sin()cos()(0000t x t x t x ωωω&+=例:圆盘转动圆盘转动惯量 Iθk 为轴的扭转刚度,定义为使得圆盘产⽣单位转⾓所需的⼒矩在圆盘的静平衡位置上任意选⼀根半径作为⾓位移的起点位置由⽜顿第⼆定律:=+θθθk I && 扭振固有频率020=+θωθ&& I k /0θω= 由上例可看出,除了选择了坐标不同之外,⾓振动与直线振动的数学描述是完全相同的。
一、选择题1.轿车的悬挂系统是由车身与轮胎间的弹簧及避震器组成的支持系统。
某型号轿车的“车身—悬挂系统”的固有周期是0.5s,这辆汽车匀速通过某路口的条状减速带,如图,已知相邻两条减速带间的距离为1.0m,该车经过该减速带过程中,下列说法正确的是()A.当轿车以30km/h的速度通过减速带时,车身上下振动的频率为2HzB.轿车通过减速带的速度大小不同,车身上下振动的幅度大小也必然不同C.轿车通过减速带的速度越大,车身上下颠簸得越剧烈D.当轿车以7.2km/h的速度通过减速带时,车身上下颠簸得最剧烈2.如图是甲、乙两个单摆做简谐运动的图象,以向右的方向作为摆球偏离平衡位置位移的正方向,从t=0时刻起,当甲第一次到达右方最大位移处时,乙在平衡位置的()A.左方,向右运动B.左方,向左运动C.右方,向右运动D.右方,向左运动3.在科学研究中,科学家常将未知现象同已知现象进行比较,找出其共同点,进一步推测未知现象的特性和规律.法国物理学家库仑在研究异种电荷的吸引力问题时,曾将扭秤的振动周期与电荷间距离的关系类比单摆的振动周期与摆球到地心距离的关系.已知单摆摆长为l,引力常量为G,地球质量为M,摆球到地心的距离为r,则单摆振动周期T与距离r的关系式为()A.T=2GMlB.T=2lGMC.T 2πGMr lD.T=2rGM4.关于简谐运动,下列说法正确的是()A .做简谐运动物体所受的回复力方向不变,始终指向平衡位置B .在恒力的作用下,物体可能做简谐运动C .做简谐运动物体速度越来越大时,加速度一定越来越小D .做简谐运动物体的加速度方向始终与速度方向相反5.关于简谐运动,下列说法中正确的是( )A .物体的位移增大时,动能减少,势能增加B .若位移为负值,则速度一定为正值加速度也一定为负值C .物体通过平衡位置时,所受合力为零,回复力为零,处于平衡状态D .物体每次通过同一位置时,其加速度相同,速度也一定相同6.一弹簧振子做简谐运动,周期为T ( )A .若t 和(t +△t )时刻振子运动速度的大小相等、方向相同,则△t 一定是2T 的整数倍B .若t 和(t +△t )时刻振子运动位移的大小相等、方向相反,则△t 一定是2T 的整数倍 C .若△t =T ,则t 和(t +△t )时刻振子运动的加速度一定相等D .若△t =2T ,则t 和(t +△t )时刻弹簧的长度一定相等 7.如图所示,三根细线于O 点处打结,A 、B 端固定在同一水平面上相距为L 的两点上,使△AOB 成直角三角形,∠BAO =30°,已知OC 线长是L ,下端C 点系着一个小球(直径可忽略)。
判断题1、系统作与激振力同频率的简谐振动,振幅决定于激振力的幅值、频率以及系统本身的物理特性。
A.对2、当初始条件为零,即==0时,系统不会有自由振动项。
A.错3、隔振系统的阻尼愈大,则隔振效果愈好。
A.对4、任何系统只有当所有自由度上的位移均为零时,系统的势能才可能为零。
B.错5、对于多自由度无阻尼线性系统,其任何可能的自由振动都可以被描述为模态运动的线性组合。
对6、一个周期激振力作用到单自由度线性系统上,系统响应的波形与激振力的波形相同,只是两波形间有一定的相位差。
错7、单自由度线性无阻尼系统的自由振动频率由系统的参数确定,与初始条件无关。
对8、多自由度振动系统的运动微分方程组中,各运动方程间的耦合,并不是振动系统的固有性质,而只是广义坐标选用的结果。
对9、无阻尼振动的固有频率只与质量和刚度有关,是系统的固有特性,与外界初始激励(初始条件)无关。
对10、对数衰减系数可以用来求阻尼比。
() A.对11、单自由度系统在简谐激励力作用下,系统将产生一个与激励力相同频率的简谐振动,但滞后一个相角。
A.对12、线性系统内各个激励产生的响应是互不影响的。
A.对13、两个同频率的简谐振动在同方向的合成运动是该频率的简谐振动。
A.对14、简谐振动的加速度,其大小与位移呈正比,而方向与位移相反,始终指向平衡位置。
A.对15、所有表示周期振动的周期函数都可以展开成Fourier级数的形式。
B.错16、广义坐标必须能完整地描述系统的运动。
A.对17、在欠阻尼和过阻尼的情况下,运动都将衰减为零。
()对18、对于无阻尼系统,速度超前位移90度。
() A.对19、瑞利法的基础是能量守恒定律。
() A.对20、有阻尼系统自由振动的频率有可能是零。
() A.对21、有阻尼系统自由振动的频率有时大于无阻尼系统的固定频率。
() A.对22、能量守恒定律可用于推导有阻尼系统和无阻尼系统的运动微分方程。
()A.对23、当质量块在垂直方向振动时,推导运动微分微分方程时都可以不计重力。
()A.对24、对于单自由度系统而言,无论质量是在水平面还是在斜面上运动,运动微分方程都是相同的。
A.对25、在空气中振动的系统可以看作是一个阻尼系统。
() A.对26无阻尼系统的振幅不随时间变化。
() A.对27、离散系统和集中参数系统是相同的。
() A.对28、广义坐标不一定是笛卡尔坐标。
() A.对29、几个不同位置质量的等效质量可以用动能等效得到。
() A.对30、简谐运动是周期运动。
() A.对31、任意一个周期函数都可以展成傅里叶级数。
() B.错32、初始扰动后,系统自由振动的频率称为固有频率。
() A.对33、叠加原理适用于线性与非线性系统。
( ) B.错34、如果在振动过程中能量总是以某种方式不断损耗,则系统可以被看作是有阻尼的。
() A.对A.对A.对扭转系统振动的固有频率等于,其中,分别表示扭簧的刚度和物体转动惯量。
A.对二、选择题无阻尼振动是等幅简谐振动,其振幅、振动频率(固有频率)和初相位分别为A.对于阻尼常数为c的黏性阻尼来说,阻尼力为。
B.初始位移为,初始速度为0的欠阻尼系统振幅为。
B.在扭转振动中,位移用来描述。
B. 角坐标阻尼比用阻尼常数和临界阻尼常数可表示为 B.初始位移为0,初始速度为的有阻尼系统的振幅为 C.线性系统自由振动的频率与以下哪些因素有关( )A. 系统的质量mB. 系统的弹簧k质量为,刚度为的系统,固有频率为()。
B.三、填空题系统中间隔一个周期的两个相邻位移可以求的(对数)衰减系数。
瑞利法可以直接求出系统的(固有)频率。
对数衰减系数表示有阻尼自由振动(振幅)衰减的快慢。
简谐振动的三要素是振幅,频率.初相位。
机械运动是一种特殊形式的运动,在这种运动过程中,机械系统将围绕(静平衡)作(往复弹性)运动。
根据系统、激励与响应的关系,常见的振动问题可以分为(振动设计)、(系统识别)和(环境检测)三类基本课题。
(临界阻尼)阻尼的性质有许多实际应用,比如在大型火炮中。
简谐激励下单自由度系统的响应由(瞬态响应)和(稳态响应)组成。
系统的自由度是表明能够描述系统各部分在任一瞬时位置的独立(广义坐标)的最小数目。
从能量的角度看,惯性是保持(动能)的元素,恢复性是贮存(势能)的元素,阻尼是使能量散逸的元素。
对于黏性阻尼和滞后阻尼,理论上运动可以永远(停止)。
( 阻尼材料)中心可有效地应用于网球拍。
机械式钟表是( 单)摆的例子。
作简谐运动的系统叫做(弹簧)振子。
无阻尼系统的自由振动反映了( 动)能和(势 ) 能不断转换。
刚度系数分别为K1、K2的两串联弹簧的等效刚度系是刚度系数分别为K1、K2的两并联弹簧的等效刚度系是K1+K2函数周期的各种频率成分对应的振幅和相角的图形表示称为 A.谱图按振动系统结构参数的特性分类,振动可以分为两类。
单摆的自由度是___1_____。
共振表明系统___固有__频率与外部激励频率是一致的。
如果系统的振动取决于外部激励,则称为___强迫__振动。
如果系统的振动仅取决于初始扰动,则称为___自由__振动。
系统的自由度表明能够描述系统各部分在任一瞬间时位置的独立__坐标___的最小数目。
完成一个运动循环的时间被称为振动的__周期___。
系统的自由度表明能够描述系统各部分在任一瞬间时位置的独立__坐标___的最小数目。
具有有限自由度的系统称为___离散系统或集中参数系统__系统。
连续系统或分布系统可以认为具有__无限多___个自由度。
两简谐运动到达某一相似位置时对应的角度差称为__相位差___两简谐运动具有相同的频率被称为__同步运动___。
单位时间内循环的次数被称为振动的__频率___。
完成一个运动循环的时间被称为振动的___周期__。
如果加速度与位移成正比且方向指向中间位置,则运动被称为__简谐运动 ___。
振动系统包括弹簧、阻尼器和__质量___。
没有___能量__损失的振动为非衰减振动。
在___激振频率与系统固有频率相等__时系统会承受相当大的振动。
初始位移为,初始速度为的无阻尼系统的相角为。
有阻尼固有频率可以用无阻尼固有频率表示为。
四、问答题简述线性系统在振动过程中动能和势能之间的关系。
答:线性系统在振动过程中动能和势能相互转换,如果没有阻尼,系统的动能和势能之和为常数。
简述刚度矩阵[K]的元素的意义。
答:如果系统的第j个自由度沿其坐标正方向有一个单位位移,其余各个自由度的位移保持为零,为保持系统这种变形状态需要在各个自由度施加外力,其中在第i个自由度上施加的外力就是kij。
什么是共振,并从能量角度简述共振的形成过程。
答:当系统的外加激励与系统的固有频率接近时候,系统发生共振;共振过程中,外加激励的能量被系统吸收,系统的振幅逐渐加大。
简述无阻尼固有频率和阻尼固有频率的联系,用关系式说明。
答:,其中是阻尼固有频率,是无阻尼固有频率,是阻尼比。
简述确定性振动和随机振动的区别,并举例说明。
答:确定性振动的物理描述量可以预测;随机振动的物理描述量不能预测。
比如:单摆振动是确定性振动,汽车在路面行驶时的上下振动是随机振动。
五、计算题如图所示系统中,已知、、、、、、、,水平刚杆的质量忽略不计。
以的线位移为运动坐标,求系统的等效刚度、等效质量及固有频率。
求下图所示,系统的固有频率。
其中,,,,。
如果,,质量块和的初始位移分别是1和-1,求系统的响应。
参考答案:由牛顿第二定律得,由题意:由特征方程得又∴设如图所示系统中,已知、、、、、、、,水平刚杆的质量忽略不计。
以的线位移为运动坐标,求系统的等效刚度、等效质量及固有频率。
参考答案:一个弹簧-质量系统,,,,,求质量块的速度,位移和加速度。
参考答案:根据式子:一台重9810N的机器别卷扬机以2m/s的速度匀速下放。
吊机器的钢丝绳直径为0.01m。
当放到绳长为20m时,卷杨机突然停止工作。
求由此引起的机器振动的周期和振幅。
参考答案:∴质量为的刚体由4个弹性支座支承。
一个质量为的物体由高度处落下,附着在刚体上没有反弹。
如果每个弹性支座的刚度为,求在如下情况下系统的固有频率;没有掉落时;掉落后。
并求出情况下系统的响应。
参考答案:(a):无m时,(b): 有m时,(c): 下落时,∴设,∴即:一个简谐振荡器质量的最大速度为10cm/s,震荡周期为2s。
如果将物体在初始位移为2cm的地方释放,求:其振动的(a)振幅;(b)初始速度;(c)加速度最大值;(d)相角。
参考答案:设又∵∴∴又∵初位移为0.02m ,即∴∴初速度:即时,即如图所示,求放置在斜平面上的弹簧-质量系统的固有振动频率。
参考答案:∵化简后得:∴一辆质量为2000kg的汽车在静载条件下使其悬架弹簧产生了0.02m的变形。
假设忽略阻尼影响,求汽车在垂直方向上的固有频率。
参考答案:一个螺旋弹簧,一端固定,在另一端施加100N的力时能产生10mm的伸长量。
现将弹簧垂直放置,两端刚性固定。
在弹簧中点处悬挂一个质量为10kg 的物体。
求物体在垂直方向向上振动一个周期所需时间。
参考答案:一个弹簧-质量系统的固有频率为10Hz,当弹簧刚度减少了800N/m是,频率改变了45%,求原弹簧的质量和刚度。
参考答案:又因为频率改变了45%,∴即:∴∴一辆汽车,空车时的固有频率为20rad/s,载有500kg乘客时的固有频率为17.32rad/s。
将汽车看作单自由度系统,求它的质量和刚度。
参考答案:参考答案:参考答案:参考答案:。