解析法设计偏心曲柄滑块机构
- 格式:doc
- 大小:235.00 KB
- 文档页数:4
《曲柄滑块机构》教学设计公开课教案教学设计一、教学目标1. 了解曲柄滑块机构的组成、工作原理和特点。
2. 掌握曲柄滑块机构在实际工程中的应用。
3. 培养学生的动手操作能力和团队协作精神。
二、教学内容1. 曲柄滑块机构的组成及其各部分的作用。
2. 曲柄滑块机构的工作原理及运动特性。
3. 曲柄滑块机构的应用案例分析。
4. 曲柄滑块机构的绘制与设计方法。
三、教学过程1. 导入:通过展示实际应用场景,引发学生对曲柄滑块机构的兴趣。
2. 理论讲解:介绍曲柄滑块机构的组成、工作原理和特点。
3. 案例分析:分析曲柄滑块机构在实际工程中的应用案例。
4. 动手实践:学生分组进行曲柄滑块机构的绘制和设计。
5. 总结与反馈:对学生的实践成果进行点评,解答学生的疑问。
四、教学方法1. 讲授法:讲解曲柄滑块机构的理论知识。
2. 案例分析法:分析曲柄滑块机构在实际工程中的应用。
3. 动手实践法:培养学生实际操作能力和团队协作精神。
4. 总结反馈法:对学生的学习成果进行点评和指导。
五、教学资源1. 教材:曲柄滑块机构相关章节。
2. 课件:曲柄滑块机构的工作原理、应用案例等。
3. 模型:曲柄滑块机构的实体模型或三维模型。
4. 绘图软件:如AutoCAD等,用于学生进行曲柄滑块机构的绘制和设计。
六、教学评价1. 评价学生对曲柄滑块机构理论知识的理解程度。
2. 评价学生对曲柄滑块机构实际应用案例的分析能力。
3. 评价学生的动手操作能力和团队协作精神。
4. 评价学生运用绘图软件进行曲柄滑块机构设计和绘制的技能水平。
七、教学难点1. 曲柄滑块机构运动特性的理解和分析。
2. 实际工程应用中曲柄滑块机构的选型和设计。
3. 利用绘图软件进行曲柄滑块机构设计和绘制的技巧。
八、教学准备1. 准备曲柄滑块机构的教材和参考资料。
2. 制作详细的课件和教学视频。
3. 准备实体模型或三维模型,以便进行直观展示。
4. 确保每组学生都有足够的绘图软件和计算机设备。
摘要曲柄压力机广泛应用于冲裁,弯曲,校正,模具冲压等工作。
本次设计的为开式固定台式中型,公称压力为1600KN曲柄压力机。
本设计主要进行该曲柄压力机曲柄滑块工作机构的设计。
在设计中,首先根据该压力机要保证的主要技术参数——公称压力、滑块行程等,初步估算曲柄,连杆,滑块,导轨相关尺寸,然后分别对其进行校核,修正,最终确定各零部件尺寸;进行装模高度调节装置设计,并最终完成该曲柄滑块工作机构设计。
关键字:公称压力;曲轴;连杆;导轨;调节装置目录第一章曲柄压力机的工作原理及主要参数 (1)1.1压力机技术参数 (1)1.2 曲柄压力机的工作原理. (1)1.3曲柄压力机工作的特点 (2)1.4 曲柄形式 (2)1.4.1、曲轴驱动的曲柄滑块机构 (3)1.4.2、偏心轴驱动的曲柄滑块机构 (4)1.4.3、曲拐驱动的曲柄滑块机构 (4)1.5.4、偏心齿轮驱动的曲柄滑块机构 (4)1.4.5各种结构的区别及最终确定设计设计思路 (6)第二章曲柄滑块机构的构成及相关分析 (6)2.1压力机曲柄滑块机构的构成 (6)2.2曲柄压力机滑块机构的运动规律分析。
(7)2.2.1滑块的位移和曲柄转角之间的关系 (7)2.2.2滑块的速度和曲柄转角的关系 (8)2.3曲柄压力机滑块机构的受力分析 (9)2.3.1忽略摩擦情况下滑块机构主要构件的力学分析 (9)2.3.2考虑摩擦情况下滑块机构主要构件的力学分析 (10)第三章装模高度调节装置总体设计 (13)3.1装模高度调节设计及电动机的选定 (13)3.1.1 装模高度调节装置构成及工做原理 (13)3.1.2调节装置电动机选定............................................................... 错误!未定义书签。
第四章齿轮传动....................................................................................... 错误!未定义书签。
偏置曲柄滑块机构课程设计一、课程目标知识目标:1. 学生能理解偏置曲柄滑块机构的基本原理与结构,掌握其运动规律及设计要点。
2. 学生能掌握偏置曲柄滑块机构的类型及其在不同应用场景中的优缺点。
3. 学生能运用数学和力学知识分析偏置曲柄滑块机构的运动和受力情况。
技能目标:1. 学生能运用CAD软件绘制偏置曲柄滑块机构的示意图,并进行简单的运动仿真。
2. 学生能根据给定的条件,设计简单的偏置曲柄滑块机构,并分析其运动性能。
3. 学生能通过实验和观察,验证偏置曲柄滑块机构的运动规律和设计原理。
情感态度价值观目标:1. 培养学生对机械设计的兴趣,激发创新意识,提高解决实际问题的能力。
2. 培养学生团队合作精神,学会倾听、交流、协作,提高沟通能力。
3. 培养学生严谨的科学态度,注重实践,养成良好的学习习惯。
本课程针对高年级学生,结合偏置曲柄滑块机构的知识深度,注重理论与实践相结合,旨在提高学生的机械设计能力、动手操作能力和创新能力。
课程目标明确,可衡量,便于教师进行教学设计和评估。
通过本课程的学习,学生将能够掌握偏置曲柄滑块机构的基本知识和技能,为今后的学习和工作打下坚实基础。
二、教学内容本章节教学内容主要包括以下几部分:1. 偏置曲柄滑块机构的基本原理与结构:- 曲柄滑块机构的定义及分类- 偏置曲柄滑块机构的结构特点与工作原理- 教材第二章第一节:曲柄滑块机构的基本概念2. 偏置曲柄滑块机构的运动分析:- 运动规律及运动方程- 偏置距对运动性能的影响- 教材第二章第二节:曲柄滑块机构的运动分析3. 偏置曲柄滑块机构的设计方法:- 设计步骤及要点- 参数选择与优化- 教材第二章第三节:曲柄滑块机构的设计方法4. 偏置曲柄滑块机构的CAD软件应用:- CAD软件的基本操作与绘图技巧- 运动仿真及分析- 教材第二章第四节:曲柄滑块机构的CAD软件应用5. 偏置曲柄滑块机构的实验与观察:- 实验设备与操作方法- 实验数据的收集与分析- 教材第二章第五节:曲柄滑块机构的实验研究教学内容按照以上安排,系统性地介绍了偏置曲柄滑块机构的基本知识、设计方法和实践应用。
![同时按K和[α]设计平面曲柄滑块机构的解析法](https://uimg.taocdn.com/aed56982e53a580216fcfec9.webp)
文章编号:1001-2354(2000)01-0033-02同时按K和[α]设计平面曲柄滑块机构的解析法Ξ胡爱萍,陈 权,邹 日文(江苏石油化工学院,江苏常州 213016)摘要:将图解原理与解析手段有机地结合起来,给出了一种同时按行程速比系数K和许用压力角[α]设计平面曲柄滑块机构的解析法。
该方法可解决根据机构的结构条件预先确定偏距、曲柄或连杆三者长度尺寸之一,以及根据机构的传动质量要求预先确定许用压力角α]的设计问题。
关键词:行程速比系数;许用压力角;曲柄滑块机构中图分类号:TH112 文献标识码:A1 引言平面曲柄滑块机构在工程实际中获得了广泛的应用,其设计问题一般归结为:已知滑块行程H和行程速比系数K,通常还带有辅助条件,如给定偏距e(或给定曲柄长度a,或给定连杆长度b),要求设计曲柄滑块机构。
为使机构有良好的传动质量,设计还必须满足机构的最大压力角αmax不大于许用压力角[α]。
对该问题的解析法求解许多教材和文献虽有介绍,但不够完善。
如文献[1~3]将许用压力角[α]放在校验中考虑,因而不能根据机构的传动质量要求预先确定许用压力角[α]。
文献[4,5]虽然将许用压力角[α]放在设计中考虑,但不能根据机构的结构条件预先确定偏距、曲柄或连杆三者长度尺寸之一,且需要用黄金分割法进行一维搜索,计算较麻烦。
本文给出了一种同时按滑块行程H、行程速比系数K和许用压力角[α]设计平面曲柄滑块机构的解析法。
该方法可解决根据机构的结构条件预先确定偏距、曲柄或连杆三者长度尺寸之一,来确定其余两杆尺寸的设计问题,具有一定的实用价值。
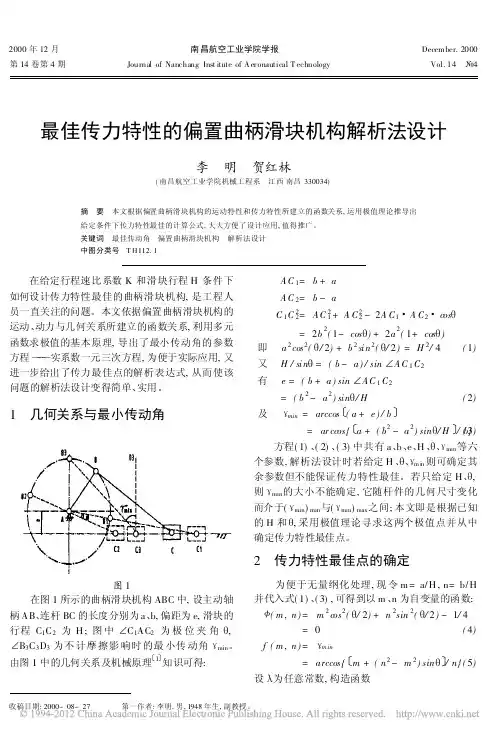
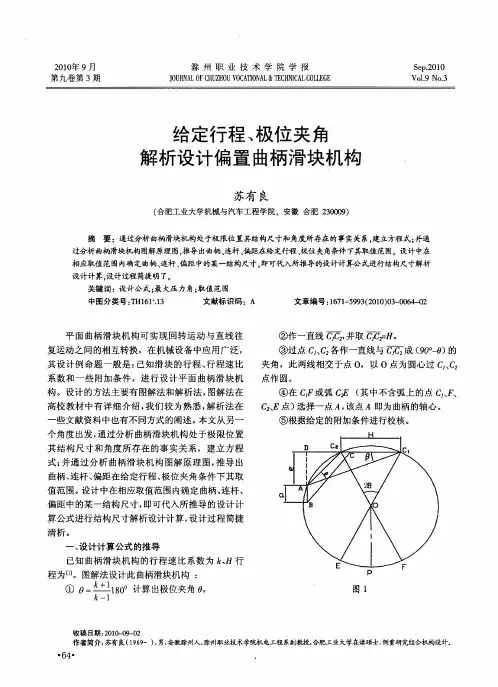
2 解析方程以a、b表示曲柄、连杆的长度;e表示曲柄固定铰链中心与滑块导路的距离,即偏距;H表示滑块行程;K为行程速比系数。
如图1所示为同时按行程速比系数K和许用压力角[α]设计平面曲柄滑块机构的基本原理图,其中C1C2=H,θ为极位夹角(θ= 180°K-1K+1),过C1与C2点的圆周η为满足给定行程速比系数K的曲柄固定铰链中心A所落居的圆周。
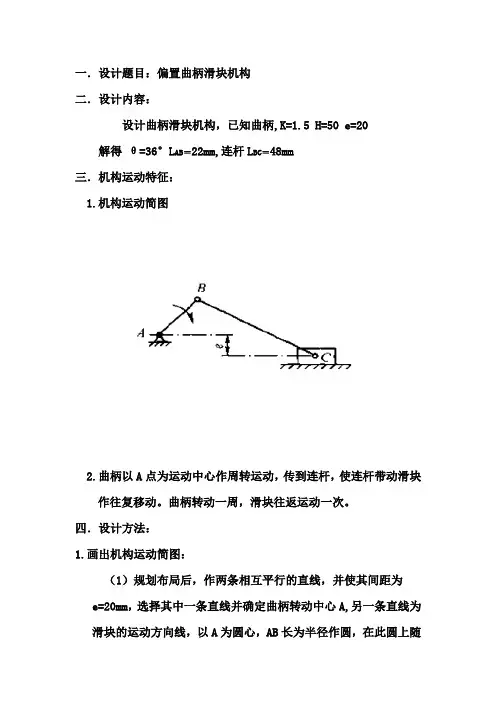
一.设计题目:偏置曲柄滑块机构
二.设计内容:
设计曲柄滑块机构,已知曲柄,K=1.5 H=50 e=20 解得θ=36°L AB=22mm,连杆L BC=48mm
三.机构运动特征:
1.机构运动简图
2.曲柄以A点为运动中心作周转运动,传到连杆,使连杆带动滑块
作往复移动。
曲柄转动一周,滑块往返运动一次。
四.设计方法:
1.画出机构运动简图:
(1)规划布局后,作两条相互平行的直线,并使其间距为e=20mm,选择其中一条直线并确定曲柄转动中心A,另一条直线为滑块的运动方向线,以A为圆心,AB长为半径作圆,在此圆上随
意确定一点B,以B点为圆心,BC长为半径作圆弧,与滑块的运动方向线相交,于C点,连接AB,BC。
最后确定机架,并标注原动件AB。
如上图所示。
2.选择适当的材料(硬质纸盒,硬质纸板,直径为3mm的塑料管);
3.根据机构运动简图设计制作各构件;
4.用胶水及塑料管连接各个构件;
5.检查构件连接,测试机构性能。
五.设计结果图:。
曲柄滑块机构运动分析的简便图解法曲柄滑块机构是利用多轴关节间通过曲柄滑块机构建立位置联系,实现传动的一类机构。
它包括曲柄轴、滑块和接头、从而实现曲线运动、往复运动、轮廓曲线运动等。
本文主要介绍一种简便的图解法,可用于分析曲柄滑块机构的运动规律。
首先是基本要素的分析,曲柄滑块机构的基本要素有曲柄轴、滑块、接头。
曲柄轴是一种用于变换位置信息的轴,它能够把位置信息传递到滑块上,使滑块形成对应的位置。
滑块能够和曲柄轴之间建立有限的接触,从而使曲柄轴把位置信息传送给接头,形成所需的运动。
其次是图解法的原理及步骤。
曲柄滑块机构的根本是控制曲柄轴运动,它的运动规律是由曲柄轴的运动控制的,而曲柄轴的运动规律是由曲柄滑块机构的特征决定的。
采用图解法可以较容易地描述出曲柄滑块机构的运动规律,从而更好地分析机构的运动特性。
图解法的基本步骤是:第一步,先确定曲柄滑块机构的结构形式,并在平面图中绘制出一个曲柄滑块机构;第二步,在机构结构图中标注它各铰接节点的位置(如轴中心点、滑块中心点等);第三步,当曲柄轴的角度发生变化时,按照基于运动的结构的原理,推算出曲柄滑块机构各连接节点的运动情况,用椭圆形表示滑块的运动轨迹;第四步,根据所得的滑块的运动轨迹的轮廓,进行有关的计算分析,可以得出某些变量与角度的规律,用于描述曲柄滑块机构的运动规律。
综上所述,图解法不仅可以帮助人们更好地理解曲柄滑块机构的运动规律,而且可以有效地解决机构设计问题。
通过图解法可以快速、准确地推导出机构的各种运动要求,从而为曲柄滑块机构的设计提供可靠的理论依据。
结论:图解法是一种利用机构特性计算分析曲柄滑块机构运动规律的简便方法,它既可以提供有效的分析手段,又可以帮助机构设计人员更好地理解机构的运动。
图解法不仅复杂性较小且易于实施,而且其结果可以用于机构的设计和调试。

目录1 引言1.1 选题的依据及意义·························································································(1)1.2 国内外研究概况及发展趋势··········································································(2)1.3 论文主要工作·······························································································(3)2 曲柄(导杆)滑块机构简介····································································(4)3 曲柄(导杆)滑块机构的运动学分析3.1 曲柄导杆滑块机构的运动分析······································································(5)3.1.1 机构装配的条件····················································································(6)3.1.2 建立数学模型·························································································(6)3.1.3 计算机辅助分析及其程序设计······························································(9)3. 2曲柄滑块机构的运动分析3.2.1 机构装配的条件·····················································································(25)3.2.2 建立数学模型·······················································································(25)3.2.3 计算机辅助分析及其程序设计·····························································(27)4 曲柄(导杆)滑块机构实验台装置设计4. 1 实验台结构·································································································(40)4.2 实验台硬件操作说明···················································································(41)4.3 用SolidWorks 2006实现实验台的立体图形················································(42)总结·········································································································(46)参考文献·········································································································(47)致谢·········································································································(48)1 引言1.1 选题的依据及意义1.曲柄(导杆)滑块机构定义曲柄滑块机构是铰链四杆机构的演化形式,由若干刚性构件用低副(回转副、移动副)联接而成的一种机构。
按曲柄与滑块相对对应位移设计曲柄滑块机构的解析法
摘要:曲柄滑块机构是工程最常见的机构,除其在机械系统中有着广泛应用外,它还对精密测量技术有着重要的应用。
本文介绍了一种按曲柄与滑块相对对应位移设计曲柄滑块机构的解析法,详细地说明了设计方法,以及曲柄滑块机构的运动学性质。
本文通过求解曲柄滑块机构的转动半径和旋转角度,利用轨迹方程,给出了求解其它运动变量的解析表达式。
最后,本文还以一个实际机构作为例子,利用本文提出的解析法,将运动变量,如旋转角度、位移以及转动半径等求算出来,以证实本文提出的解析法的正确性。
- 1 -。
幼儿园大班疫情学习计划一、学习目标1. 让幼儿在疫情期间保持学习的连续性和积极性,不因不能上学而丧失学习的动力和兴趣;2. 帮助幼儿掌握一定的学习内容,提高他们的认知水平和学习能力;3. 培养幼儿的自主学习能力和合作精神,提高他们的综合素质。
二、学习内容1. 语言表达:乐观向上的表达,通过故事、诗歌、游戏等形式培养幼儿的语言表达能力,培养他们的乐观情绪;2. 数学概念:让幼儿在生活中感知和认识数字、形状、大小、长度等数学概念,培养他们对数学的兴趣和好奇心;3. 绘画创作:通过观察和感知,让幼儿自由地表达自己对世界的观察和理解,培养他们的艺术创造力;4. 实践活动:通过游戏、手工制作等活动,培养幼儿的动手能力和创造力,丰富他们的生活经验;5. 社交能力:培养幼儿的社会适应能力和团队协作意识,促进他们的个性发展。
三、学习方法1. 亲子学习:鼓励家长和幼儿一起参与学习,通过家庭教育增进亲子关系,培养家庭共同学习的氛围;2. 线上学习:利用网络资源,为幼儿提供各种学习内容,如网络课程、教学视频等,帮助幼儿在家中继续学习;3. 自主学习:鼓励幼儿主动观察、思考和探索,培养他们的自主学习能力和独立思考能力;4. 互助学习:鼓励幼儿之间相互学习和交流,培养他们的合作精神和团队意识。
四、学习环境1. 创设良好的学习环境,包括家庭、幼儿园和社区等多个层面;2. 家庭学习环境:家长要创造良好的学习氛围,提供适宜的学习空间和资源,让幼儿在家中能够愉快地学习;3. 幼儿园学习环境:幼儿园要利用各种途径向家长传达学习内容,同时为幼儿提供线上学习服务和学习指导;4. 社区学习环境:社区要支持和配合学校,在社区内为幼儿提供学习资源和学习活动,让幼儿在社区中也能获取学习帮助和资源。
五、学习活动1. 语言表达:通过诗歌朗诵、趣味故事讲解等学习活动,让幼儿在欢乐中提高语言表达能力;2. 数学概念:通过数学游戏、形状分类等学习活动,让幼儿在愉快的氛围中感知和认知数学概念;3. 绘画创作:通过绘画比赛、手工DIY等活动,让幼儿展现自己的创造力和想象力;4. 实践活动:通过生活实践、家务劳动等活动,让幼儿在生活中学以致用,培养他们的实践能力;5. 社交能力:通过角色扮演、小组讨论等活动,培养幼儿的社交能力和团队协作意识。
分析法设计偏爱曲柄滑块机构
1,成立数学模型
如下图,由该机构在X 轴, Y轴上的长度关系有:
l1cos1l 2cos2xc
e l 1sin1l 2sin20
以图中 ABC 为初始地点,有:
00
10
s xc l c0o
代入可得:
l1cos(0) l2cos2l c0o s
e l 1sin(0)l 2sin20
已知条件: e=20mm, L1=23mm, L2=56.5mm, Lc o=26.875mm,
θo,o
ω=336 /s=336x2pi/360rad/s
2, 用 matlab/Simulink成立偏爱曲柄滑块机构模型
X轴的长度关系建模:
(t het_1 代表θ 1,弧度制; thet_2 代表θ 2,弧度制)对应 X模块
Y轴的长度关系建模:
对应 Y模块
整体模型:(Ramp模块中 Slope 为ω =336;thet代表θ,角度制;v,a 分别代表滑块的速度和加快度)
运转时间设为 60/56s( 对应曲柄转动一周 ) ,定步长( 1μs)。
3,在 matlab 工作区调用模型结果画图,程序:
Plot (thet ,s); %作位移曲线
Plot (thet ,v); %作速度曲线
Plot (thet ,a); %作加快度曲线
结果:
位移曲线
速度曲线加快度曲线。
解析法设计曲柄滑块机构
尚先云
【期刊名称】《机械管理开发》
【年(卷),期】2004(000)002
【摘要】利用解析法,在已知滑块的最大行程s、偏距e的条件下,根据行程速比系数K推导出曲柄滑块机构中曲柄和连杆尺寸的计算公式.
【总页数】2页(P35,37)
【作者】尚先云
【作者单位】太原城市职业技术学院,山西,太原,030027
【正文语种】中文
【中图分类】TH133.5
【相关文献】
1.平面曲柄滑块机构的同步解析设计法 [J], 苏有良
2.包装机中曲柄滑块机构给定两对相应位移的解析法设计 [J], 李军;高德;卢富德
3.按曲柄与滑块相对对应位移设计曲柄滑块机构的解析法 [J], 冷兴聚
4.按急回要求设计曲柄滑块机构的一种新解析法 [J], 李建功;王家金
5.根据许用压力角、行程速比系数和行程设计曲柄滑块机构的解析法 [J], 苏有良因版权原因,仅展示原文概要,查看原文内容请购买。
1.分析曲柄滑块机构机架长度及滑块偏置尺寸运动参数的影响。
曲柄滑块机构是一种常见的转动运动转化为往复运动的机构。
机架长度和滑块偏置尺寸对该机构的运动参数有较大的影响。
首先,机架长度会影响机构的行程和速度。
机架长度越长,滑块往复运动的行程也就越大,同时速度也就越慢。
反之,机架长度越短,滑块往复运动的行程越小,速度也就越快。
因此,在实际设计中,应根据所需的行程和速度来选择合适的机架长度。
其次,滑块偏置尺寸会影响滑块的加速度和最大速度。
滑块偏置越大,滑块启动时的加速度就越大,最大速度也就越大。
但是,滑块偏置过大会导致机构的冲击振动较大,影响机构的稳定性和工作寿命。
因此,在实际设计中,应根据机构的要求选择合适的滑块偏置尺寸。
总的来说,机架长度和滑块偏置尺寸都是影响曲柄滑块机构运动参数的重要因素,在设计时需要综合考虑。
需要根据机构所要求的行程、速度、稳定性和工作寿命等方面的要求进行合理设计。
偏置曲柄滑块机构的解析设计
李文新
【期刊名称】《成都纺织高等专科学校学报》
【年(卷),期】2000(017)003
【总页数】2页(P18-19)
【作者】李文新
【作者单位】成都纺织高等专科学校机械系
【正文语种】中文
【中图分类】TH133.5
【相关文献】
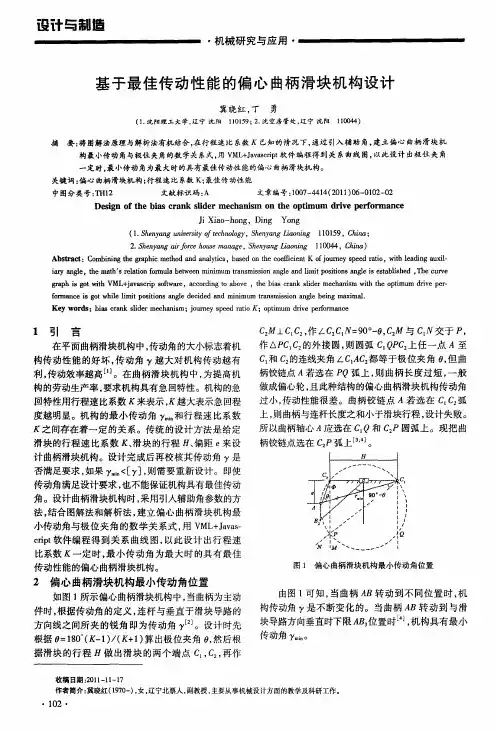
1.最佳传力特性的偏置曲柄滑块机构解析法设计 [J], 李明;贺红林
2.按传动角最优的偏置曲柄滑块机构解析法设计 [J], 李明;李春晔
3.给定行程、极位夹角解析设计偏置曲柄滑块机构 [J], 苏有良
4.按曲柄与滑块相对对应位移设计曲柄滑块机构的解析法 [J], 冷兴聚
5.偏置式曲柄滑块机构的解析设计 [J], 马东晓;杨海林
因版权原因,仅展示原文概要,查看原文内容请购买。
解析法设计偏心曲柄滑块机构
1,建立数学模型
如图所示,由该机构在X轴,Y轴上的长度关系有:1122
1122
cos cos
sin sin0
l l xc
e l l
θθ
θθ
⎧+=
⎨
++=
⎩
以图中AB0C0为初始位置,有:
10
c o
s xc l
θθθ
⎧=+
⎨
=-
⎩
代入可得:
1022
1022
cos()cos
sin()sin0
c o
l l l s
e l l
θθθ
θθθ
⎧++-=
⎨
+++=
⎩
已知条件:e=20mm, L1=23mm,L2=56.5mm, Lc0o=26.875mm, θ0=143.34o, ω=336o/s=336x2pi/360rad/s
2,用matlab/Simulink建立偏心曲柄滑块机构模型
X轴的长度关系建模:
(thet_1代表θ1,弧度制;thet_2代表θ2,弧度制)对应X模块
Y轴的长度关系建模:
对应Y模块
整体模型:(Ramp模块中Slope为ω=336;thet代表θ,角度制;v,a分别代表滑块的速度和加速度)
运行时间设为60/56s(对应曲柄转动一周),定步长(1μs)。
3,在matlab工作区调用模型结果绘图,程序:
Plot(thet,s);%作位移曲线
Plot(thet,v);%作速度曲线
Plot(thet,a);%作加速度曲线
结果:
位移曲线
速度曲线
加速度曲线。