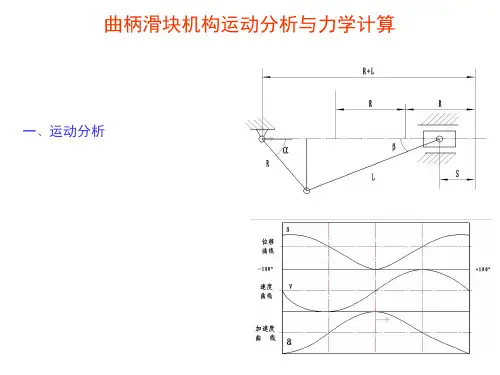
偏置曲柄滑块机构计算
- 格式:docx
- 大小:26.45 KB
- 文档页数:5
偏置曲柄滑块的运动方程式
偏置曲柄滑块是一种机械装置,由一个曲柄和一个滑块组成。
曲柄是一个旋转的杆状物体,而滑块是沿着曲柄轨迹移动的物体。
偏置曲柄滑块的运动方程式描述了滑块在不同时间点上的位置。
运动方程式可以通过几何关系和动力学原理推导得到。
下面是一个典型的偏置曲柄滑块运动方程式的示例:
假设曲柄长度为L,曲柄的角速度为ω,滑块的位置为(x, y),滑块与曲柄连接处的角度为θ。
根据几何关系,我们可以得到以下关系式:
x = L*cos(θ)
y = L*sin(θ)
其中,θ的取值范围通常是从0到2π,表示一次完整的旋转。
根据动力学原理,我们可以推导出滑块的加速度与曲柄的角度加速度之间的关系。
假设滑块的质量为m,滑块的加速度为a,曲柄的角加速度为α,那么有以下关系式:
m*a_x = -m*L*α*sin(θ) - m*L*ω^2*cos(θ)
m*a_y = m*L*α*cos(θ) - m*g
其中,g表示重力加速度。
通过解这两个方程,我们可以得到滑块的加速度a_x和a_y,进而求解出滑块的速度v_x和v_y以及位置x和y随时间的变化。
综上所述,偏置曲柄滑块的运动方程式用于描述滑块在不同时间点上的位置。
通过几何关系和动力学原理,我们可以推导出滑块的位置、速度和加速度与曲柄的角度和角加速度之间的关系。
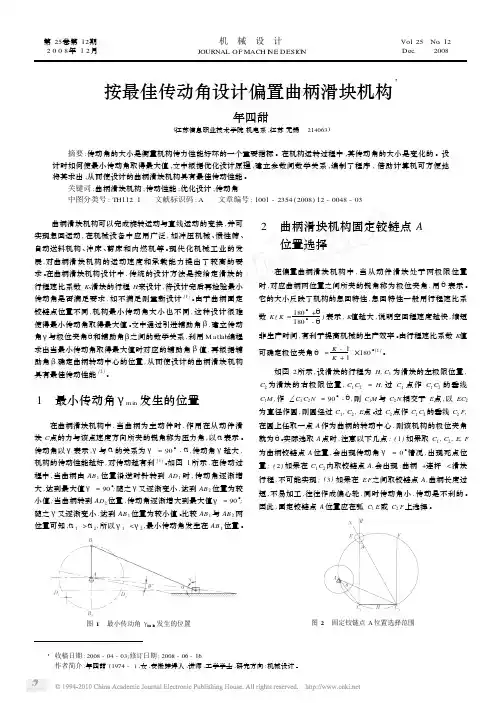
曲柄滑块机构的运动精度分析与计算宋亮;赵鹏兵【摘要】曲柄滑块机构是一种典型的四连杆机构,尽管设计时理论计算可以达到很高的精度,但是由于构件的制造误差及运动副的配合间隙等因素,会使机构在运动中产生输出误差,有时还会显著超出机构设计的允许误差.依据概率统计的相关理论进行机构设计,即考虑构件制造尺寸的随机误差,以保证机构运动的精度在允许的误差范围内.利用MATLAB进行仿真计算和实例研究,得出了理论设计和精度分析的计算结果.该方法准确、效率高、而且适合其它类型的机构设计,具有较大的工程实际应用价值.%Slider-crank mechanism is a typical four-bar linkage, in spite of the high precision when it' s calculated theoretically. The manufacturing error and kinematic pair clearance of the components will lead to the output error during the motion of the mechanism. Sometimes,it will significantly exceed the tolerance of the design. According to the probability and statistics theory, the mechanism is designed, that' s considering the random error of the component to make sure that the motion accuracy is in the allowed error range. Utilizing MATLAB to simulate and calculate based on case studies. and the theoretical design and accuracy analysis are obtained. This method is accurate and very efficiently, it also can be used in other kind of mechanism design, and it has much more practical value in engineering.【期刊名称】《科学技术与工程》【年(卷),期】2011(011)010【总页数】5页(P2201-2205)【关键词】曲柄滑块机构;运动学;概率设计;等影响法;精度分析【作者】宋亮;赵鹏兵【作者单位】海军装备部,西安,710043;西北工业大学现代设计与集成制造技术教育部重点实验室,西安,710072【正文语种】中文【中图分类】TH112.1曲柄滑块机构是一种单移动副的四连杆机构,如图1和图2所示,分别为对心和偏心曲柄滑块机构。
偏置曲柄滑块的运动方程式1. 引言偏置曲柄滑块机构是一种常见的机械传动装置,广泛应用于各个领域,如工业生产线、汽车发动机等。
它由一个旋转的偏置曲柄和一个在偏置曲柄上滑动的滑块组成。
通过改变偏置曲柄的旋转角度,可以控制滑块的运动轨迹和速度。
本文将介绍偏置曲柄滑块机构的基本原理和运动方程式,并通过数学推导和图示进行详细阐述。
2. 偏置曲柄滑块机构的基本原理偏置曲柄滑块机构由三个主要部分组成:偏置曲柄、连杆和滑块。
其中,偏置曲柄是一个固定在轴上并绕轴旋转的零件,连杆连接着偏置曲柄和滑块。
当偏置曲柄绕轴旋转时,连杆上的一端固定在偏置曲柄上,另一端连接着滑块。
由于连杆长度不变且固定在两个点上,所以当偏置曲柄旋转时,滑块被迫在一定的轨迹上运动。
3. 偏置曲柄滑块的运动方程式为了推导偏置曲柄滑块的运动方程式,我们需要定义一些参数和符号:•偏置曲柄长度:a•连杆长度:b•偏置曲柄旋转角度:θ•滑块位置:(x,y)根据几何关系,可以得到以下方程:x = a * cos(θ) + b * cos(φ) (1) y = a * sin(θ) + b * sin(φ) (2)其中,φ是连杆与x轴的夹角。
为了求解φ,我们可以利用三角形余弦定理:cos(φ) = (a^2 + b^2 - x^2 - y^2) / (2ab)将cos(φ)代入方程(1)和(2)中,即可得到偏置曲柄滑块的运动方程式。
4. 运动轨迹和速度分析根据运动方程式(1)和(2),我们可以分析偏置曲柄滑块机构的运动轨迹和速度。
4.1 运动轨迹通过改变偏置曲柄旋转角度θ,可以控制滑块的运动轨迹。
当θ=0时,滑块位于初始位置(a, 0)。
随着θ的增大,滑块将沿着一个椭圆轨迹运动,直到θ=π/2时达到最高点。
4.2 速度分析根据运动方程式(1)和(2),我们可以求解滑块的速度。
对x和y关于时间t求导数,即可得到滑块在x和y方向上的速度:v_x = -a * sin(θ) * θ’ - b * sin(φ) * φ’ (3) v_y = a * cos(θ) * θ’ + b * cos(φ) * φ’ (4)其中,θ’和φ’分别表示偏置曲柄旋转角度和连杆夹角随时间变化的导数。
偏置曲柄滑块机构是一种常用的机械传动装置,其行程速比系数是衡量其性能的重要指标之一。
本文将从以下几个方面对偏置曲柄滑块机构的行程速比系数进行探讨。
一、偏置曲柄滑块机构的基本结构和工作原理偏置曲柄滑块机构由曲柄、连杆和滑块三部分组成,通过曲柄的旋转驱动连杆运动,进而带动滑块进行直线往复运动。
其工作原理如下:当曲柄旋转时,连杆由于铰接在曲柄和滑块上,会受到离心力的作用而产生往复运动,最终带动滑块进行直线往复运动。
二、行程速比系数的定义和计算方法行程速比系数是指偏置曲柄滑块机构在工作过程中,滑块在两个极值点(即最大位移点和最小位移点)的速度比值。
行程速比系数可用公式表示如下:\[S = \frac{v_{max}}{v_{min}}\]其中,S为行程速比系数,v_{max}为滑块在最大位移点的速度,v_{min}为滑块在最小位移点的速度。
通过测量这两个速度并代入公式中,即可得到偏置曲柄滑块机构的行程速比系数。
三、影响偏置曲柄滑块机构行程速比系数的因素1. 曲柄长度:曲柄长度的不同会影响到曲柄的旋转角度和速度,进而影响到连杆的往复运动速度,从而影响到滑块的速度,最终影响行程速比系数。
2. 连杆长度:连杆长度的变化会改变连杆的往复运动轨迹,进而影响到滑块的速度变化,从而影响行程速比系数。
3. 滑块质量和摩擦系数:滑块的质量和摩擦系数的变化会影响滑块的运动阻力,进而影响到滑块的速度,最终影响行程速比系数。
四、优化偏置曲柄滑块机构行程速比系数的方法1. 优化设计曲柄和连杆:通过合理设计曲柄和连杆的长度和结构,可以使偏置曲柄滑块机构在运动过程中速度更加均匀,从而优化行程速比系数。
2. 采用低摩擦材料和润滑方式:选择低摩擦系数的材料,并采用合适的润滑方式,可以降低滑块的摩擦阻力,从而优化行程速比系数。
3. 控制滑块质量和惯性:通过控制滑块的质量和惯性,可以减小滑块的惯性力,使其运动更加平稳,从而优化行程速比系数。
曲柄滑块机构滑块位移计算1. 引言嘿,朋友们,今天我们来聊聊一个听起来有点复杂但其实非常有趣的东西——曲柄滑块机构。
这可不是某种高深的数学公式,而是我们生活中经常能见到的一个小玩意儿!想想看,汽车的发动机、一些机械手臂,甚至某些玩具里面都可能用到这个机构,真的是无处不在,像老百姓的热水器一样,虽然看不见,但却在默默为我们服务。
那么,什么是曲柄滑块机构呢?简单来说,它是通过一个曲柄和滑块的配合,实现直线运动和旋转运动的转化。
你可以想象一下,当你转动一个把手,里面的曲柄就开始摇摆,而滑块就像跟着节奏舞动的舞者,跟着曲柄的节奏在轨道上滑行。
这种奇妙的转换其实在很多地方都能看到,比如家里的榨汁机、打印机,甚至一些健身器材,都是它在“辛勤工作”。
2. 曲柄滑块机构的基本原理2.1 工作原理好,咱们接下来深入点,看看这个机构是怎么工作的。
曲柄滑块机构的核心就是一个固定的轴心,曲柄围绕这个轴心旋转,而滑块在轨道上来回滑动。
就像一个旋转的小风车,风车的叶子不断转动,而下面的小车子随着风的方向在轨道上奔跑。
这个原理不仅简单,而且巧妙。
要说到滑块的位移计算,咱们得用到一些简单的几何知识。
不过,别担心,我不会让你看那些复杂的公式。
我们可以通过一些简单的图形和推理来理解。
首先,我们需要知道曲柄的长度、滑块的初始位置以及转角度。
这就像你在做一道菜,得先准备好所有的食材,才能下锅。
2.2 位移的计算接下来,咱们来聊聊如何计算滑块的位移。
假设曲柄的长度是L,转动的角度是θ,那么滑块的位移可以通过一些简单的三角函数来算。
你可以把它想象成一个小三角形,曲柄的旋转就像三角形的一个边在转动,而滑块的移动就是另外一条边的变化。
通过这两条边,我们就能轻松找出滑块的位移。
要是你觉得这有点儿复杂,也不用太担心,咱们可以把它当作一种有趣的游戏,尝试不同的角度,看滑块怎么移动,仿佛是在看一场小型的机械表演,滑块的每一次移动都像是在跳舞,每个转动的角度都在为它的舞步伴奏。
从偏置曲柄滑块机构运动方程式探析机械运
动规律
偏置曲柄滑块机构是机械领域中一种常见的转动与直线运动的结合机构,它常被应用于各种机械装置中,例如汽车发动机、压缩机、机床等。
在这篇文章中,我们将详细探索偏置曲柄滑块机构运动方程式的含义,以及机械运动的规律。
偏置曲柄滑块机构中的主要元件是曲柄、连杆和滑块。
当曲柄转动时,连杆便随之运动,滑块则产生直线运动。
而方程式中涉及的角度与长度等量则包括:曲柄转角、连杆长度、连杆转角、滑块位置等参数。
通过偏置曲柄滑块机构运动方程式的推导,我们可以得到其运动规律。
其中,连杆的角速度和加速度随曲柄转角变化而发生变化,在滑块运动过程中,其速度和加速度也随之变化。
在实际应用中,我们可以通过对机械元件尺寸和转动速度等参数的选择,来控制偏置曲柄滑块机构的运动规律,以满足不同的机械运动需求。
总的来说,偏置曲柄滑块机构是机械领域中一种常见而重要的结构,其运动方程式的探析有助于我们更深入地理解机械运动规律以及其应用。
而通过不断学习和实践,我们可以更好地应用偏置曲柄滑块机构,为机械领域的发展做出更大的贡献。
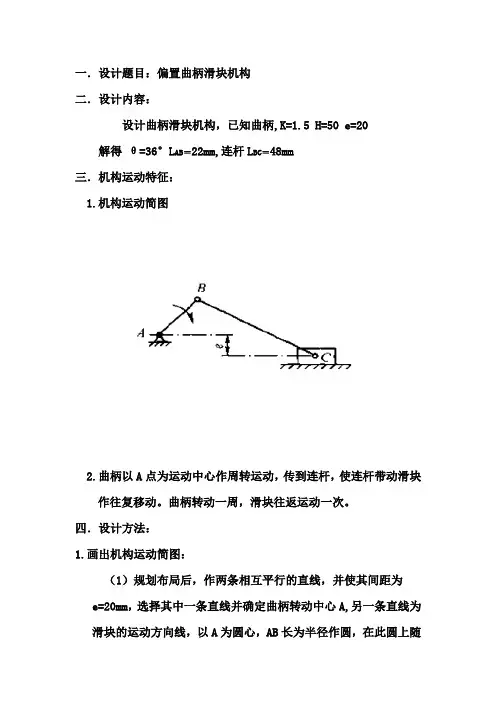
一.设计题目:偏置曲柄滑块机构
二.设计内容:
设计曲柄滑块机构,已知曲柄,K=1.5 H=50 e=20 解得θ=36°L AB=22mm,连杆L BC=48mm
三.机构运动特征:
1.机构运动简图
2.曲柄以A点为运动中心作周转运动,传到连杆,使连杆带动滑块
作往复移动。
曲柄转动一周,滑块往返运动一次。
四.设计方法:
1.画出机构运动简图:
(1)规划布局后,作两条相互平行的直线,并使其间距为e=20mm,选择其中一条直线并确定曲柄转动中心A,另一条直线为滑块的运动方向线,以A为圆心,AB长为半径作圆,在此圆上随
意确定一点B,以B点为圆心,BC长为半径作圆弧,与滑块的运动方向线相交,于C点,连接AB,BC。
最后确定机架,并标注原动件AB。
如上图所示。
2.选择适当的材料(硬质纸盒,硬质纸板,直径为3mm的塑料管);
3.根据机构运动简图设计制作各构件;
4.用胶水及塑料管连接各个构件;
5.检查构件连接,测试机构性能。
五.设计结果图:。
本篇再考察一道曲柄滑块机构的设计。
同样是给定行程速比系数来确定杆长。
设计一偏置曲柄滑块机构,已知滑块的行程速比系数为1.5,滑块的行程50,导路的偏距20,求曲柄和连杆长度,并求其最大压力角。
问题分析首先设计机构,然后再求最大压力角。
机构的设计。
先计算出行程速比系数如下那么根据题意,最后的结果应当如下图。
滑块的两个极位之间距离是50mm,而固定铰链A在与CD平行20mm的直线上,而且A点到C,D的夹角是36度。
图解总是从已知条件开始,然后逐步确定未知因素。
本问题中知道三个数字:50mm,20mm,36度。
而这个36度时与DC的距离相关的,所以图解时先画出滑块的两个极限位置,然后确定铰链A所在的水平线,接着就是根据36度这个条件最终确定A的位置。
(1)确定滑块的极位及固定铰链A所在的直线先绘制水平线段C2C1,使得其距离为50mm.然后在其上方20mm的地方绘制一条水平直线I.那么铰链A就应该在这条直线上。
(2)根据极位夹角确定铰链A所在的圆下面要根据极位夹角来确定A所在的曲线,这样,该曲线与上述曲线相交就可以唯一确定A点的位置。
A点到C1,C2形成的夹角是36度。
那么所有与C1,C2形成夹角为36度的点有什么特征呢?---圆周角具有这种特征。
从几何知道,在一个圆上面,对应于同一个圆弧的圆周角都相等。
基于这一点,过C2做直线垂直于C2C1,而作射线C1E与C2C1夹角为90-36=54度,二者交于点E,则C2EC1这个角度就是36度。
现在以C1E为直径做一个圆,则在该圆上任意取一点,该点与C2C1连线的夹角就都是36度,从而A点必然在该圆上面。
根据上述规则做出的上图发现,该圆与水平线I并不相交。
这意味着作图有问题。
实际上,刚才作的C1E在C2C1之下,所以导致不相交。
因此改变策略,在C2C1之上作C1E,使得它与C2C1的夹角为54度。
然后以C1E为直径作出一个圆。
该圆与直线I有两个交点:A1和A2。
偏置滑块机构的设计由题目给定的数据L=100mm行程速比系数K在1。
2—1。
5范围内选取可由曲柄滑块机构的极位夹角公式11801kkθ-=+k=1.2—1.5 ∴其极位夹角θ的取值范围为16.36~36在这范围内取极位夹角为25。
滑块的行程题目给出S=100mm偏置距离e选取40mm用图解法求出各杆的长度如下:由已知滑块的工作行程为100mm,作BB’为100mm,过点B作BB'所在水平面的垂线BP,过点B’作直线作直线B’P交于点P,并使'BPB∠=25.然后过B、B’、P三点作圆。
因为已知偏距e=40mm,所以作直线平行于直线BB’,向下平移40mm,与圆O’交于一点O,则O点为曲柄的支点,连接OB、OB',则OB—OB’=2aOB+OB’=2b从图中量取得:AB=151.32mm AB’=61。
86mm则可知曲柄滑块机构的:曲柄a=44.73mm 连杆b=106.59mm由已知滑块的工作行程为100mm,作BB’为100mm,过点B作BB’所在水平面的垂线BP,过点B’作直线作直线B’P交于点P,并使'BPB∠=25。
然后过B、B’、P三点作圆.因为已知偏距e=40mm,所以作直线平行于直线BB’,向下平移40mm,与圆O'交于一点O,则O点为曲柄的支点,连接OB、OB’,则OB—OB’=2aOB+OB ’=2b从图中量取得: AB=151。
32mm AB ’=61。
86mm则可知曲柄滑块机构的:曲柄 a=44。
73mm 连杆b=106。
59mm 因为题目要求推头回程向下的距离为30mm ,因此从动件的行程h=30mm 。
由选定条件近休止角为127'90s πφ=推程角为718o πφ=回程角1990s πφ=远休止角'9o πφ=,h=30mm ,基圆半径050r =mm ,从动杆长度为40mm ,滚子半径5r r =mm 。
电动机的选定及传动系统方案的设计1、电动机转速、功率的确定题目要求5—6s 包装一个件,即要求曲柄和凸轮的转速为12r/min 考虑到转速比较低,因此可选用低转速的电动机,查常用电动机规格,选用Y160L —8型电动机,其转速为720r/min,功率为7.5kW 。
偏置曲柄滑块机构力矩偏置曲柄滑块机构是一种常见的机械传动装置,广泛应用于机械工程领域。
其中一个重要的参数是力矩,它是描述机构产生力量的能力的物理量。
本文将探讨偏置曲柄滑块机构力矩的相关内容。
力矩可以理解为力的杠杆效应,它是力的作用点到转轴的距离与力的大小的乘积。
在偏置曲柄滑块机构中,力矩是由曲柄臂和滑块力的组合产生的。
曲柄臂指的是从转轴到曲柄连接点的距离,而滑块力是滑块在运动过程中产生的力。
这两个因素共同决定了偏置曲柄滑块机构的力矩。
在机械设计中,力矩对于机构的稳定性和工作效率至关重要。
首先,力矩的大小与机构的工作能力直接相关。
较大的力矩能够提供更大的输出力量,使机构能够应对更大的负载。
其次,力矩还影响机构的运动速度和稳定性。
较大的力矩会导致机构的运动速度减慢,但也会增加机构的稳定性。
因此,在实际应用中,需要根据具体需求平衡力矩的大小和机构的速度稳定性。
在偏置曲柄滑块机构中,力矩的计算可以通过简单的几何原理来推导。
曲柄臂与滑块力之间的距离与曲柄的旋转角度之间存在着正弦关系。
因此,可以通过测量这两个参数来计算力矩的大小。
此外,还可以通过应用牛顿第二定律来计算力矩的大小,即力矩等于质量乘以加速度乘以距离。
除了力矩的大小,力矩的方向也是机构设计中需要考虑的因素之一。
力矩可以是顺时针或逆时针方向,这取决于滑块力和曲柄臂的方向。
根据具体应用的需要,设计师需要确定力矩的方向,以确保机构的运动和力量传递能够顺利进行。
总之,偏置曲柄滑块机构力矩是描述机构力量传递能力的重要参数。
力矩的大小和方向对于机构的工作能力、速度稳定性和力量传递效率都有重要影响。
在机械设计中,需要合理计算和选择力矩的大小和方向,以满足具体应用的需求。
对心曲柄滑块连杆长度计算【最新版】目录1.引言2.曲柄滑块机构的基本概念3.曲柄长度与滑块行程和偏置距离的关系4.连杆长度的计算方法5.举例说明6.结论正文1.引言曲柄滑块机构是一种常见的机械传动机构,广泛应用于各种工程机械、自动化设备等领域。
在曲柄滑块机构中,曲柄和连杆的长度对于机构的性能和运动特性有着重要的影响。
因此,如何准确计算曲柄滑块机构的杆长一直是工程技术人员关注的问题。
2.曲柄滑块机构的基本概念曲柄滑块机构是由曲柄、连杆和滑块组成的一种机械传动机构。
在机构中,曲柄通过连杆与滑块相连,通过曲柄的旋转驱动滑块做直线运动。
根据滑块运动轨迹的不同,曲柄滑块机构可以分为对心曲柄滑块机构和偏置曲柄滑块机构两种类型。
3.曲柄长度与滑块行程和偏置距离的关系在曲柄滑块机构中,曲柄长度与滑块的行程和偏置距离有着密切的几何关系。
对于对心曲柄滑块机构,曲柄长度等于滑块的行程;对于偏置曲柄滑块机构,曲柄长度等于滑块的行程减去偏置距离。
4.连杆长度的计算方法在曲柄滑块机构中,连杆长度的计算方法取决于机构的类型和已知的参数。
对于对心曲柄滑块机构,已知曲柄长度和滑块行程,可以通过以下公式计算连杆长度:连杆长度 = 曲柄长度 - 滑块行程 / 2对于偏置曲柄滑块机构,已知曲柄长度、滑块行程和偏置距离,可以通过以下公式计算连杆长度:连杆长度 = 曲柄长度 - 滑块行程 / 2 - 偏置距离5.举例说明假设一个对心曲柄滑块机构,已知曲柄长度为 300mm,滑块行程为300mm,求连杆长度。
根据公式:连杆长度 = 曲柄长度 - 滑块行程 / 2代入已知参数,得:连杆长度 = 300mm - 300mm / 2 = 150mm因此,该对心曲柄滑块机构的连杆长度为 150mm。
6.结论通过以上分析,我们可以得出曲柄滑块机构中曲柄长度和连杆长度的计算方法。
具有最优传力性能的曲柄滑块机构的设计宁海霞1董萍摘要:在曲柄滑块机构的设计中,将x作为设计变量,求出已知滑块行程H,行程速比系数K时机构传力性能最优的x值,使得最小传动角γmin为最大,从而设计出此机构。
关键词:最优传力性能;曲柄滑块机构;行程速比系数;最小传动角机器种类很多,但它们都是由各种机构组成的,曲柄滑块机构就是常用机构之一。
它有一个重要特点是具有急回特性。
故按行程速比系数K设计具有最优传力性能的曲柄滑块机构是设计中常遇到的问题。
本文将x作为设计变量,给出了解决问题的方法。
图1当主动件为曲柄时,随着其位置不同,γ值亦不同,最小传动角γmin 出现在曲柄与滑块导路垂直的位置,其值为:)(cos 1min bea +=-γ (1)2.X 和最小传动角γmin 的关系设计一曲柄滑块机构,已知:滑块行程H ,行程速比系数K ,待定设计参数为a 、b 和e 。
e 也就确定。
下在△AC 1C 2中θcos ))((2)()(222a b a b a b a b H +--++-= 因为 x a b =-所以 θcos )2(2)2(222a x x a x x H +-++=2sin )1(cos 222θθx H x a -+-= (2)又因为xe ax C AC b a H /2)sin(sin 21+=∠+=θ 所以 H a x e /)2(sin 22+=θ (3) 将 a x b += 代入 (1))(cos 1min ax ae ++=-γ (4)将式(2)、(3)代入式(4),γmin 仅为 x 的函数,则可求得γmin 的值。
二、设计最优传力性能的曲柄滑块机构 设计变量 x 的取值范围。
寻优区间起点在C 1处: x min =0 寻优区间终点在M 点: θtg Hx =max 在 x 的取值范围内根据式(2)、(3)和(4)可求得x 一一对应的γmin 值。
利用一维寻优最优化技术黄金分割法,来求γmin 取极大值时的x 值。
具有最优传力性能的曲柄滑块机构的设计
宁海霞1董萍
摘要:在曲柄滑块机构的设计中,将x作为设计变量,求出已知滑块行程H,行程速比系数K 时机构传力性能最优的x 值,使得最小传动角γmin为最大,从而设计出此机构。
关键词:最优传力性能;曲柄滑块机构;行程速比系数;最小传动角
机器种类很多,但它们都是由各种机构组成的,曲柄滑块机构就是常用机构之一。
它有一个重要特点是具有急回特性。
故按行程速比系数 K 设计具有最优传力性能的曲柄滑块机构是设计中常遇到的问题。
本文将 x 作为设计变量,给出了解决问题的方法。
一、x 和最小传动角γmin 的关系
1.最小传动角γmin的计算
曲柄滑块机构如图 1 所示,图中 AB 为曲柄,长度为 a,BC 为连杆,长度为 b,偏心距为 e。
γ愈大,对机构传动愈有利,它是机构传动性能的重要指标之一,工程上常以γ值来衡量机构的传力性能。
1作者简介:宁海霞(1设计、复合材料
图 1
当主动件为曲柄时,随着其位置不同,γ值亦不同,最小传动角γmin 出现在曲柄与滑块导路垂直的位置,其值为:
min= cos-1(a +e) (1)
b
2.X 和最小传动角γmin 的关系设计一曲柄滑块机构,已知:滑块行程H,行程速比系数 K,待定设计参数为 a 、 b 和 e 。
K - 1
计算极位夹角: = 180K -1
K + 1
根据已知条件,作出图2,曲柄支点在圆周上,它的位置决定传力性能,现设 AC1=x,x 作为设计变量,一旦确定了 A 点的位置,a、b 和 e 也就确定。
下面找出 a、b和 e与设计变量 x之间的关系。
图2 在△AC1C2中
(2)
H 2 = (b -a )2 +(b +a )2 -2(b -a )(b +a )cos
b -a =x
H 2 = x 2 + (x + 2a )2 - 2x (x + 2a ) cos
x (cos
-1) + H 2 - x 2 sin 2
a = 2
a +
b x + 2 a
sin(AC C ) e / x 所以 e = sin
(x 2 +2a 2)/ H
(3)
将 b = x +a 代入 (1)
-1 e + a min = cos -
1 ( e + a
)
(4) x +a
将式(2)、( 3)代入式(4),γmin 仅为 x 的函数,则可求得γmin 的值。
二、设计最优传力性能的曲柄滑块机构 设计变量 x 的取值范围。
寻优区间起点在 C 1 处:
x min =0
寻优区间终点在M 点:
在 x 的取值范围内根据式(2)、(3)和(4)可求得 x 一一对应的γmin 值。
利用一维寻优最优化技术黄金分割法,来求γmin 取极大值时的 x 值。
将γmin 最大时的 x 值代入(2)、( 3)求出 a 、e ,由b=x+a 求出b 值。
三、设计实例
试设计一曲柄滑块机构,已知滑块行程 H=50mm ,行程速比系数 K=1.5。
求 传力性能最优的曲柄滑块机构。
x 的取值范围为 0~68.819mm ,x=19.104mm 时,γmin 的最大值为 27.458°。
曲柄 a=22.537mm
因为 所以
又因为
si H n
x max
H
tg
连杆 b=41.641mm
(2)
偏心距 e=14.413
四、结论本文结合图解法和解析法把 x 作为设计变量,给出了根据行程速比系数 K 时最优传力性能的曲柄滑块机构的最优设计方法。
参考文献:[1]来瞒虔等.机械原理教学指南[M].北京:高等教育出版社,1998.
Design of the slider crank chain with Optimum
Driving Performance
NING Hai-xia DONG Ping
Abstract: In this paper, the design variable x was used in the design of slider crank chain with the datum of ram stroke (H) and stroke velocity ration coefficient (K). Slider crank chain comes to its optimum driving performance as the minimum driving angle (γmin) gets up to the maximum. The corresponding x was got,and the according slider crank chain was projected.
Key words: optimum driving performance; slider crank chain; stroke velocity ratio coefficient; minimum driving angle。