RecurDyn常见QA整理
- 格式:pdf
- 大小:398.20 KB
- 文档页数:11
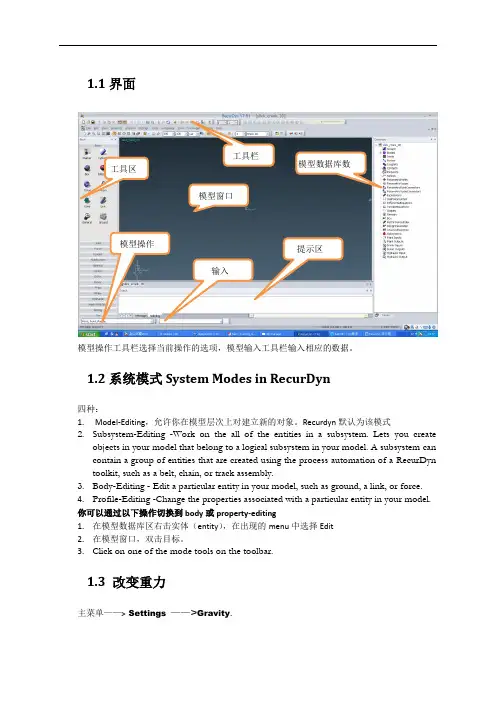
1.1界面模型操作工具栏选择当前操作的选项,模型输入工具栏输入相应的数据。
1.2系统模式System Modes in RecurDyn四种:1. Model-Editing ,允许你在模型层次上对建立新的对象。
Recurdyn 默认为该模式2. Subsystem-Editing -Work on the all of the entities in a subsystem. Lets you createobjects in your model that belong to a logical subsystem in your model. A subsystemcan contain a group of entities that are created using the process automation of aRecurDyn toolkit, such as a belt, chain, or track assembly.3. Body-Editing - Edit a particular entity in your model, such as ground, a link, orforce.4. Profile-Editing -Change the properties associated with a particular entity in yourmodel. 你可以通过以下操作切换到body 或property-editing1. 在模型数据库区右击实体(entity ),在出现的menu 中选择Edit2. 在模型窗口,双击目标。
3. Click on one of the mode tools on the toolbar.1.3 改变重力主菜单——>Settings ——>Gravity .工具区工具栏模型窗口 模型数据库数 模型操作输入 提示区可以在下拉菜单中选择常规的重力加速度值。



recurdyn基本算法
RecurDyn是一种基于多体动力学的仿真软件,广泛应用于机械工程、航空航天、汽车工程、船舶工程等领域。
本文主要介绍RecurDyn 的基本算法。
1. 多体动力学模型
RecurDyn的核心是多体动力学模型,包括质量、速度、位置、加速度等物理量。
模型的基本假设是物体之间存在相互作用力,根据牛顿定律,物体的加速度与作用力成正比,与物体的质量成反比。
2. 时空离散化
为了对物体的运动进行仿真,需要将时间和空间离散化,即将连续的时间和空间转化为离散的时间和空间。
在RecurDyn中,时间和空间离散化采用了显式欧拉法或隐式欧拉法。
3. 接触检测
接触是多体动力学模型中重要的问题,需要检测物体之间是否接触,并计算接触力。
RecurDyn采用了快速多极子方法或广义平面算法进行接触检测。
4. 接触力计算
在接触检测之后,需要计算接触力。
RecurDyn采用了Hertz接触理论或Coulomb接触模型进行接触力计算。
5. 约束条件
在多体动力学模型中,物体之间存在约束条件,如接触约束、几何约束、运动约束等。
RecurDyn采用了拉格朗日乘子法或笛卡尔-拉
格朗日方法进行约束条件的处理。
以上是RecurDyn的基本算法,通过对这些算法的深入了解和应用,可以更好地进行物体的运动仿真和分析。
RAU Automation M Lahti/MS 27.11.2006 i(ii)1. PRESS SECTION 压榨部 ............................................................ 错误!未定义书签。
1.1 Press Section Supply Air Distribution 压榨部供气分配错误!未定义书签。
1.2 Guiding of Press Felts 毛毯校正 ............................. 错误!未定义书签。
1.3 Press Felt Off-Track Monitoring 毛毯跑偏监测.... 错误!未定义书签。
1.4 Press Felt Stretching 毛毯张紧.............................. 错误!未定义书签。
1.5 SymBelt Roll Doctor 靴辊刮刀............................... 错误!未定义书签。
1.6 1st and 2nd Press Saveall Movement 一、二压移动接水盘错误!未定义书签。
1.7 Press Section Cleaning Shower Oscillation 压榨喷淋摆动 (12)1.8 Press Section Movement Prewarnings 压榨部动作预报警 (14)1.9 Pick-Up Automatics 自动引纸 (16)1.10 Pick-Up Suction Roll Locks 引纸抽吸辊锁定 (21)1.11 Press Section Top Felt Corner Roll Movement 压榨部上毛布角辊移动 (23)1.12 2nd Press Bottom Felt Corner Roll Movement 二压底毛布角辊移动 (25)1.13 1st Press Corner Felt Corner Roll Movement一压毛布角辊动作 (26)1.14 Control of Press Section Suction Roll Seal Strips 压榨部真空吸移辊密封条控制 (30)1.15 1st Press Top Roll Lifting 一压上辊抬起 (31)1.16 2nd Press Top Roll Lifting 二压上辊抬起 (34)1.17 Lubrication Monitoring of SymBelt Roll Bearings and SymZL Roll 靴辊轴承及靴压中高辊液压控制 (37)1.18 1st Press Status Control一压状态控制 (39)1.19 1st Press Load Control 一压载荷控制 (44)1.20 1st Press Loading Pressure Monitoring 一压负载压力监控 (47)1.21 1st Press Supply Pressure 一压供应压力 (48)1.22 1st Press SymBelt/SymZL Rolls' Return Oil Temperature 一道靴压靴压中高辊回油温度 (49)1.23 1st Press SymBelt History一压靴套寿命 (51)1.24 1st Press SymBelt Roll Belt Stretching一压靴套伸长度 (52)1.25 1st Press SymBelt Roll Air Pressure一压靴辊空气压力 (55)1.26 1st Press SymZL Roll Air Pressure一压中高辊空气压力 (58)1.27 1st Press Clamp Mechanism一压锁定机制 (59)RAU Automation M Lahti/MS 27.11.2006 ii(ii)1.28 2nd Press Status Control二压中高控制 (60)1.29 2nd Press Load Control 二压载荷控制 (65)1.30 2nd Press Loading Pressure Monitoring 二压载荷压力监测 (68)1.31 2nd Press Supply Pressure 二压供给压力 (69)1.32 2nd Press SymBelt/SymZL Rolls' Return Oil Temperature (70)1.33 2nd press SymBelt History二压靴套寿命 (72)1.34 2nd Press SymBelt Roll Belt Stretching二压靴靴套伸长度1.35 2nd Press SymBelt Roll Air Pressure二压靴辊空气压力1.36 2nd Press SymZL Roll Air Pressure二压中高辊空气压力 (79)1.37 2nd Press Clamp Mechanism二压锁定机制 (80)1.38 PressRun Blow Box Movement压榨运行吹风箱动作 (81)1.39 Pick-Up Roll 1st Chamber Vacuum吸移辊一号真空室真空度 (83)1.40 Pick-Up Roll 2nd Chamber Vacuum吸移辊二号真空室真空度 (86)1.41 Transfer Suction Roll Chamber Vacuum转移真空辊真空室真空度 (89)1.42 Transfer Suction Box Vacuum转移真空箱真空度 (91)RAU Automation M Lahti/MS 27.11.2006 1 1.PRESS SECTION1.1Press Section Supply Air Distribution 压榨部压缩空气分配PH-132324 Press section feed air distribution1.1.1Operating Principle 操作原理Compressed air is supplied to the equipment cabinets for distribution to the different consumption points.压缩空气被送到设备箱,由分配器送到不同的用气点。
retrievalqa使用例全文共四篇示例,供读者参考第一篇示例:RetrievalQA是一个旨在改进信息检索和问答系统的工具,通过使用最新的自然语言处理和机器学习技术来提供更快速和准确的检索结果。
在今天的信息爆炸时代,我们面临着海量的数据和信息,大多数情况下我们需要从中找到我们需要的答案。
RetrievalQA就是为了解决这个问题而诞生的。
RetrievalQA的使用方法非常简单,用户只需要输入一个问题或者关键词,系统就会立即返回相关的文档或资料。
这些结果不仅可以是全文文档的摘要,还可以是问题的答案或者相关文章的链接。
通过这种方式,用户可以更加快速和准确地找到自己需要的信息,节省了大量的时间和精力。
RetrievalQA的优势在于其高效性和准确性。
我们知道,传统的搜索引擎在处理复杂问题时常常无法给出满意的答案,而且搜索结果也缺乏一定的结构性。
RetrievalQA则是基于最新的自然语言处理和机器学习算法,可以更好地理解用户的意图,并且能够从海量的信息中提取出最相关的答案。
RetrievalQA还可以为用户提供更加个性化和定制化的服务。
用户可以根据自己的需求和偏好来调整系统的设置,比如指定搜索的范围、过滤结果的条件等。
这样一来,用户就可以得到更加准确和有针对性的搜索结果,提高了工作和学习的效率。
RetrievalQA不仅可以用于个人的信息检索,还可以应用在各种领域,比如教育、医疗、金融等。
在教育领域,老师可以利用RetrievalQA来准备教学材料,学生可以用来查阅辅助资料;在医疗领域,医生可以通过RetrievalQA来快速获取临床指南和最新的研究成果,提高诊疗效率;在金融领域,投资者可以利用RetrievalQA来获取市场资讯和行业新闻,做出更加明智的投资决策。
第二篇示例:近年来,随着人工智能技术的不断发展,检索问答系统(retrievalqa)在文本理解和语义匹配方面的应用变得越来越广泛。


Training Manual 运动副和作用力本章内容•体的属性INTRODUCTION TO INTRODUCTION TO RecurDyn •运动副分类•定义驱动条件•作用力RecurDyn V7 R1RecurDynV7 R1INTRODUCTION TO INTRODUCTION TO RecurDyn体的属性RecurDyn V7 R1RecurDynV7 R1INTRODUCTION TO INTRODUCTION TO RecurDyn RecurDyn V7 R1 V7 R1RecurDyn •body 质量属性–密度的修改–右键点击part ,选择属性菜单•body 的初始状态的建立body 的基本属性INTRODUCTION TO INTRODUCTION TO RecurDyn RecurDyn V7 R1 V7 R1RecurDyn •初始条件的建立body 的基本属性INTRODUCTION TO INTRODUCTION TO RecurDyn运动副分类RecurDyn V7 R1RecurDynV7 R11. 运动副定义: 一个系统通常是由多个构件组成的,各个构件之间通常存在某些约束关系,即一个构件限制另一个构件的运动,两个构件之间的这种约束关系,通常称为运动副。
2. 运动副分类:低副旋转副、滑移副、圆柱副、球副、平面副、万向节副、螺杆副、齿轮副、耦合副和固定副等。
高副点-线副、线-线副。
基本副平行副、垂直副、方向副、点面副、点线副、点点副。
运动副的定义和分类INTRODUCTION TO INTRODUCTION TO RecurDynRecurDyn V7 R1V7 R1RecurDyn旋转副(Revolute)约束两构件只能在某一点处绕旋转轴旋转;限制3个平动自由度和2个旋转自由度。
移动副(translate)约束两构件只能沿某滑移轴线滑移;限制2个平动自由度和3个旋转自由度。
QAR事件标准A319/320 QAR事件标准编号事件名称参数三级事件标准二级事件标准一级事件标准1005低高度超速(<2500英尺,T≥10秒)空速250节230节221节1006超VMO(空速>VMO+4节)时间6秒3秒1007超MMO(马赫数>MMO+0.004)时间6秒3秒1008操作起落架收上时超速(T≥3秒)空速220节1009起落架放下后速度大(T≥3秒)空速285/0.681010进近速度大(1000英尺)空速V APP+25V APP+20V APP+151011进近速度小(1000英尺)空速V APP-10V APP-8V APP-51012进近速度大(500英尺)空速VAPP+20V APP+15V APP+101013进近速度小(500英尺)空速VAPP-10V APP-8V APP-51014进近速度大(50英尺)空速VAPP+15V APP+11V APP+81015进近速度小(50英尺)空速V APP-10V APP-8V APP-51016放起落架时速度大(T≥3秒)空速250节1017起飞后超襟/缝翼限速(T≥3秒)空速VFE+4VFE1018进近时超襟/缝翼限速(T≥3秒)空速VFE+4VFE1022着陆时速度大空速V APP+15V APP+111023着陆时速度小空速VLS-10VLS-8VLS-51024超轮胎限速地速195节1025颠簸中超速(空速275节/马赫数0.76)时间600秒300秒120秒1027中断起飞地速100节80节50节1028速度小(T≥3秒)空速VLS-10VLS-7VLS-31029着陆时刹车晚(地速从“接地速度-10”到“接地速度-60”持续时间)时间28秒23秒18秒1030直线滑行速度大地速32节1031转弯滑行速度大地速15节1032爬升速度大空速V2+50V2+40V2+301033着陆时顺风(<100英尺)风速151181034短五边时V APP可疑(T≥4秒)V APPVLS+25VLS+20编号事件名称参数三级事件标准二级事件标准一级事件标准1035着陆时出现可疑的减速(T≥3秒)纵向加速度-0.45g-0.40g-0.35g1038爬升速度小(100—1500英尺)空速V2-8V2-51051着陆后U形转弯(仅作为记录信息)1052快速脱离跑道(仅作为记录信息)1100起飞离地仰角大(A319)仰角14°13°起飞离地仰角大(A320)12°11°起飞离地仰角大(A321)9.7°8.7°1101起飞阶段俯仰率大(A319)俯仰率6.5°/秒5.5°/秒起飞阶段俯仰率大(A320)6.5°/秒5.5°/秒起飞阶段俯仰率大(A321)6.0°/秒5.0°/秒1102起飞阶段俯仰率小俯仰率1.5°/秒2.0°/秒1103初始爬升仰角大(<400英尺,T≥3秒)仰角+25°+21°+19°1104初始爬升仰角小(<400英尺,T≥3秒)仰角+8°+10°+12°1108接地仰角大(A319)仰角12°11°接地仰角大(A320)10.2°9.2°接地仰角大(A321)8.2°7.2°1109接地仰角小(A319)仰角1°1.7°2.5°接地仰角小(A320)0.5°1°接地仰角小(A321)0°0.5°1111着陆时俯仰率大俯仰率3°/秒2.5°/秒2°/秒1200五边进近时坡度大(200-100英尺,T≥2秒)坡度10°8°1201五边进近时坡度大(500-200英尺,T≥2秒)坡度20°15°1202进近时坡度大(1500-500英尺,T≥2秒)坡度35°30°25°1203坡度大(>1500英尺,T≥3秒)坡度40°36°32°1204五边进近时坡度不稳(次数)次数864编号事件名称参数三级事件标准二级事件标准一级事件标准1206起飞坡度大(<35英尺,T≥1秒) 坡度6°5°1207爬升时坡度大(35-400英尺,T≥2秒)坡度25°20°1208爬升时坡度大(400-1500英尺,T≥2秒)坡度35°30°1209起飞时坡度不稳(次数)次数8641210平飘时坡度大(<5英尺)坡度7°5°3°1211坡度变化幅度大(<100英尺)坡度14°10°6°1311未建立下滑道(<1400英尺)(仅作为记录信息)1312航迹高(1200英尺)航迹角3.95°3.7°3.4°1313航迹低(1200英尺)航迹角2.2°2.4°2.6°1314航迹高(800英尺)航迹角3.95°3.7°3.4°1315航迹低(800英尺)航迹角2.2°2.4°2.6°1316航迹高(400英尺)航迹角3.95°3.7°3.4°1317航迹低(400英尺)航迹角2.2°2.4°2.6°1400下降陡(从下降到10000英尺,T≥30秒)航迹角-9°-7°-6°1401进近时下降率大(>2000英尺,T≥3秒)下降率-3000英尺/分-2500英尺/分-2000英尺/分1402进近时下降率大(2000-1000英尺,T≥3秒)下降率-1800英尺/分-1500英尺/分-1200英尺/分1403进近时下降率大(1000-500英尺,T≥3秒)下降率-1500英尺/分-1300英尺/分-1100英尺/分1404进近时下降率大(500-50英尺,T≥3秒)下降率-1300英尺/分-1100英尺/分-1000英尺/分1405下降率大(<50英尺,T≥2秒)下降率-900英尺/分-800英尺/分-700英尺/分1406下降率大(10000-3000英尺,T ≥60秒)下降率-3500英尺/分-3000英尺/分-2500英尺/分1407起飞后爬升率低(T≥5秒)爬升率500英尺/分750英尺/分1000英尺/分1500抬轮时垂直加速度大垂直加速度1.45g1.4g1.35g1501飞行中垂直加速度大垂直加速度≤0.3g或≥1.8g1504接地时垂直加速度大垂直加速度1.75g1.6g1.5g1600起飞后收襟/缝翼早高度700英尺800英尺1601着陆襟翼设置晚高度1000英尺编号事件名称参数三级事件标准二级事件标准一级事件标准1602着陆时构型错误构型CONF≤1+FCONF2CONF31605复飞时构型异常构型CONFFULL,起落架放出,T≥20秒CONFFULL,起落架收上,T≥20秒CONF3,起落架放出,T≥10秒1606五边进近中使用减速板使用1607巡航时自动驾驶仪断开时间30分15分3分1609收起落架晚高度500英尺300英尺1611反推使用晚时间<50节接地后10秒接地后5秒1613推力大时,使用减速板时间60秒40秒20秒1619反推使用过度(仍使用全反推)地速30节55节65节1701短五边中推力小(A319)推力损失19%15%11%短五边中推力小(A320)19%15%11%短五边中推力小(A321)12%10%8%1702起飞或复飞时EGT超限(T≥2秒)EGT950℃940℃935℃1703着陆时减推力晚(油门位置)油门位置地面在CLB或接地2秒后不在IDLE3英尺时在CLB或地面不在IDLE10英尺时在CLB或3英尺时不在IDLE1705进近中推力不对称(EPR差值>0.05)时间60秒30秒10秒1706反推推力不对称(EPR差值>0.05)时间15秒10秒5秒1708地面滑行中推力大(N1值)N170%65%60%1800起飞中航向变化大(从100节到离地,T≥2秒)航向角5°3°1801低于下滑道(>1000英尺,T≥3秒)下滑道1.510.51802高于下滑道(>1000英尺,T≥3秒)下滑道-1.5-1-0.51803偏离航向道(>1000英尺,T≥3秒)航向道1.510.51804低于下滑道(<1000英尺,T≥3秒)下滑道1.510.51805高于下滑道(<1000英尺,T≥3秒)下滑道-1.5-1-0.51806偏离航向道(<1000英尺,T≥3秒)航向道1.510.51807着陆后航向变化大(>60节,T≥2秒)航向角5°3°1808平飘长(从30英尺到接地)时间14秒12秒10秒1812进跑道端口时高度低高度25英尺30英尺35英尺编号事件名称参数三级事件标准二级事件标准一级事件标准1813进跑道端口时高度高高度80英尺70英尺60英尺1814航向变化大(<500英尺)航向角25°20°15°1815着陆时航向变化大航向角6°5°4°1817从跑道端口到接地距离短距离250米350米450米1818从跑道端口到接地距离长距离1050米900米750米1819平飘短时间3秒4秒5秒1820平飘晚下降率1901超襟翼限制高度(T≥10秒)高度20000英尺1902超飞行限制高度(T≥3秒)高度39100英尺1903风切变警告(<1500英尺)警告1904复飞高度<200英尺>200英尺1906着陆弹跳下降率400英尺/分,且着陆弹跳200英尺/分,且着陆弹跳着陆弹跳1907着陆后复飞次数1次>1次1909阿尔法平台警告1910备用法则警告1911直接法则警告1915双操纵(来自于副驾驶位的干预)操纵量>15°≤15°<6°1916双操纵(来自于机长位的干预)操纵量>15°≤15°<6°1917双操纵1918TCAS RA警告警告1920GPWS警告(>1000英尺)警告1921GPWS警告(1000-500英尺)警告1922GPWS警告(<500英尺)警告1924起落架未锁定高度<1000英尺1932发动机空中停车(T≥20秒)N2,EGTN2<12%且EGT<300℃。

MHRA关于OOS的指南常见问题的QAOut of specification (OOS).超标(OOS)常见问答.1. Has the MHRA produced any guidance?Out of specificationinvestigations (194Kb).1. MHRA有相关指南吗?答:见Out of specification investigations(194Kb)2. Why is there a need to conduct an investigation of an OOS test resultif the decision has been taken to reject the batch?Aphase 1 investigation should always be conducted in order to try and establishan assignable cause and determine whether any other batches may be affected. Indetermining the assignable and root cause of the problem appropriate correctiveand preventative actions can be undertaken.2. 如果已决定拒绝该批了为什么还需要进行OOS调查?答:为了尝试和确定一个明确的原因并决定是否有其他批次受到影响,阶段1调查总应进行。
在确定了问题明确的和根本的原因后应进行纠错和预防措施。
)3. Who should investigate OOS?Boththe manufacturers and the laboratories should be involved in the investigation.3. 谁应调查OOS?答:制造商和实验室应参与调查。
Linux提供了大量的命令,利用它可以有效地完成大量的工作,如磁盘操作、文件存取、目录操作、进程管理、文件权限设定等。
所以,在Linux系统上工作离不开使用系统提供的命令。
要想真正理解Linux系统,就必须从Linux命令学起,通过基础的命令学习可以进一步理解Linux系统。
不同Linux发行版的命令数量不一样,但Linux发行版本最少的命令也有200多个。
这里笔者把比较重要和使用频率最多的命令,按照它们在系统中的作用分成下面六个部分一一介绍。
◆ 安装和登录命令:login、shutdown、halt、reboot、install、mount、umount、chsh、exit、last;◆ 文件处理命令:file、mkdir、grep、dd、find、mv、ls、diff、cat、ln;◆ 系统管理相关命令:df、top、free、quota、at、lp、adduser、groupadd、kill、crontab;◆ 网络操作命令:ifconfig、ip、ping、netstat、telnet、ftp、route、rlogin、rcp、finger、mail、 nslookup;◆ 系统安全相关命令:passwd、su、umask、chgrp、chmod、chown、chattr、sudo ps、who;◆ 其它命令:tar、unzip、gunzip、unarj、mtools、man、unendcode、uudecode。
本文以Mandrake Linux 9.1(Kenrel 2.4.21)为例,介绍Linux下的安装和登录命令。
login1.作用login的作用是登录系统,它的使用权限是所有用户。
2.格式login [name][-p ][-h 主机名称]-p:通知login保持现在的环境参数。
-h:用来向远程登录的之间传输用户名。
如果选择用命令行模式登录Linux的话,那么看到的第一个Linux命令就是login:。
“recurdyn柔体碰撞接触参数大小”是一个在工程领域中非常重要的主题。
在机械设计、仿真分析和工艺优化中,recurdyn软件的柔体碰撞接触参数大小直接影响着模拟结果的准确性和可靠性。
本文将深入探讨recurdyn柔体碰撞接触参数大小的影响及其重要性,为了更好的探讨这一主题,我们将从以下几个方面展开讨论:1. 什么是recurdyn柔体碰撞接触参数大小?recurdyn是一款专业的多体动力学仿真软件,其柔体碰撞接触参数大小指的是在仿真模型中对于柔性结构的碰撞接触参数的设定。
这些参数包括柔性结构的材料特性、几何形状、碰撞系数、接触刚度等,它们将直接影响着模拟结果的真实性和可靠性。
2. recurdyn柔体碰撞接触参数大小的影响recurdyn柔体碰撞接触参数大小的设置将对仿真结果产生重要影响。
参数设置过大或者过小都会导致模拟结果的偏差,甚至影响到仿真的稳定性。
在实际工程应用中,合理设置柔体碰撞接触参数大小对于模拟结果的准确性至关重要。
3. 如何合理设定recurdyn柔体碰撞接触参数大小合理设定recurdyn柔体碰撞接触参数大小是一个复杂而又关键的工程问题。
对象的材料性质、碰撞速度、接触角度、表面粗糙度等都需要综合考虑。
在实际应用中,通常需要结合理论分析、实验验证和仿真优化等手段来确保参数设置的准确性和可靠性。
4. 我对recurdyn柔体碰撞接触参数大小的个人观点和理解作为一个经验丰富的工程师,我深知recurdyn柔体碰撞接触参数大小在工程仿真中的重要性。
合理设定柔体碰撞接触参数大小不仅能够确保仿真结果的准确性,也能够提高工程设计的效率和可靠性。
我认为在工程实践中应当高度重视recurdyn柔体碰撞接触参数大小的合理设置。
总结回顾recurdyn柔体碰撞接触参数大小是工程仿真中一个至关重要的主题。
合理设定这些参数对于确保模拟结果的真实性和可靠性至关重要。
在实际应用中,我们需要综合考虑材料特性、几何形状、碰撞系数和接触刚度等因素,采用理论分析、实验验证和仿真优化等手段来确保参数设置的准确性和可靠性。
标题:飞机QAR 监控标准一、飞行安全1. 遵守国际民航组织(ICAO)和相关国家的航空安全法规和标准。
2. 实施飞行前安全检查,确保飞机机械状况良好,符合飞行安全要求。
3. 定期进行飞行训练,保持机组人员的技能和资质符合要求。
4. 制定应急预案,定期进行模拟演练,提高应对紧急情况的能力。
二、机械维护1. 建立完善的机械维护程序,包括定期检查、保养、维修和大修等。
2. 对飞机机械部件进行详细检查,及时发现和修复潜在的安全隐患。
3. 实施预防性维护,提前发现和解决可能导致机械故障的问题。
4. 建立机械故障报告和分析制度,对故障进行归类、分析,采取改进措施。
三、航空器检查1. 按照相关法规和标准,定期对飞机进行详细检查,确保其适航性。
2. 对飞机的重要系统和部件进行重点检查,如起飞、降落、导航等系统。
3. 对检查中发现的问题及时进行维修和更换,确保飞机安全运行。
4. 对维修记录进行详细记录和分析,为航空器的适航性提供可靠依据。
四、飞行员操作1. 制定飞行员操作规范,明确飞行任务和程序,确保飞行员正确执行任务。
2. 进行飞行员培训,提高飞行员的技能和应对紧急情况的能力。
3. 对飞行员的操作进行监控和评估,及时发现不规范或不安全的行为。
4. 对飞行员进行定期考核和评估,确保其技能和资质符合要求。
五、空中交通管制1. 遵守空中交通管制规定,与空中交通管制中心保持密切联系。
2. 了解并遵循空域使用规定,确保飞行安全。
3. 对空中交通管制的指令和要求及时响应和处理。
4. 对空中交通管制系统的使用和维护进行规范和管理。
六、天气监测1. 建立完善的天气监测系统,及时获取飞行区域的天气信息。
2. 对天气状况进行实时监测和分析,特别是对可能影响飞行安全的天气现象如雷暴、冰雹等。
3. 对天气状况进行预测和评估,提前采取应对措施。
4. 向机组人员及时通报天气状况和建议的飞行路径或措施。
七、安全记录1. 建立完善的安全记录制度,包括事故报告、事故调查和分析等。
【转】RecurDyn经验帮助RecurDyn, 经验1.force 就是力,也就是 F. 在RecurDyn 中力可以用公式或者方程来表示。
force 中有各种各样的力,例如spring ,bushing等Joint 就是约束,限制物体的自由度。
contact 是力的一种。
物体接触时候产生的力。
例如小球掉到地面上。
force 和 Joint 在一些极端的条件下可以等价的。
例如,绞结,你就可以用bushing 来代替,把绞结相应的钢都定义的非常大就可以了。
例如球绞结,他限制了物体连接处的x,y,z 三个方向不能运动。
如果用bushing 来代替,你可以把bushing 的X,Y,Z 的刚度都定义到很大(10E9),这样,物体在x,y,z 方向的位移非常小了-〉0 。
相当于把x,y,z都给限制住了。
这些方法可以解决一些过约束问题。
详细的你可以看一看各种力的刚度矩阵。
以及contact的力的方程。
2.怎么为FFLEX添加转动副?答:可以的,在柔性体上施加一个mpc or fdr, mpc 的master node 上施加铰接就可以了。
施加铰接的时候,选择点的时候就选择这个节点就可以。
不对NODE自由度进行拘束时,也可以用一般拘束方式(JOINTS/ Bushing)#但是要注意一点,记得把FFLEX BODY的connecting parameters内的user force connectore关闭,否则会有求解问题。
原文说明如下:Use Force Connector : It determines the connector type. If you check option, it means that you want to use a force connector. On the other hand, un-checking means that you want to use a fixed joint as a connector.3.关于柔性体,建议用R-Flex. 采用模态综合法建立柔性体。
RecurDyn常见问题及解答目录安装和帮助 (2)概念理解 (3)Recurdyn导入和导出 (4)基本操作 (6)技术问题 (8)约束和接触 (8)柔性体 (8)履带 (9)链 (9)带 (10)分析计算 (10)其他 (11)安装和帮助:Q:RecurdynV7R2正式版和试用版的安装讲解?A:参考我们的安装文件。
Q:我可以获得哪方面的技术支持?A:使用版和正式版得到的技术支持不同。
根据购买技术服务与否,分别可以获得简单问题咨询、复杂问题咨询、模型调试、客户化定制等不同等级的技术支持。
Q:帮助文档有中文版的吗?A:目前只有英文的帮助文档,中文帮助文档正在进行中,将来会有。
Q:练习模型在哪个文件夹?A:C:\Program Files\FunctionBay, Inc\RecurDyn V7R2\Help\Manual\Tutorials\Basic TutorialQ:Tut1_Crank Slider 3D文件夹怎么没有任何模型?A:模型都是自己按照Tut1_Crank Slider建立的,文件夹里没有CAD模型。
概念理解:Q:SYSFNC的第2,3个参数是什么意思?A:第2个参数指坐标信息,第3个参数指坐标数量。
比如DX,DX有I,J坐标系也可以是I,J,K坐标系。
Q:rotational spring force中spring coefficient 和damping coefficient两个参数各自对扭矩的影响是什么?A:前者是弹簧刚度,乘上变形角度得到扭矩;后者是阻尼,乘上旋转速度得到扭矩。
Q:ExtendedSurfaceToSurface参数在实际运用中的对分析结果的影响A:法向力可表示为-k*(abs(delt))^m1-c*((abs(delt))^m3)*(dot(delt))^m2其中m1对应刚度指数;m2对应阻尼指数;m3对应渗透指数。
各量取值的多少,要看你定义的是线性或非线性。
Q:用F-Flex导入recurdyn中的柔性体的各向同性材料属性中的阻尼率是什么意思?A:Damping Ratioζ:Structural damping ratio of the element and the damping matrix of is C computed from the following equation.C=ζ* K它是振动力学中一个重要的系数,是阻尼与刚度的比值Q:YAW,PITCH,ROLL是姿态角度吗?A:yaw,pitch,roll分别返回坐标系marker1相对于参考坐标系marker2按照321旋转序列的第1,2,3个转角。
Q:313 Euler angle 是个啥意思?和321是怎么区别的呢?A:先绕z轴旋转,再绕x轴旋转,再绕z轴旋转。
Q:请问仿真环境中End Time,Step,Plot Multiplier Step Factor 的定义和设置大小的区别?A:end time :最终仿真时间;step: 步数;最后一个参数乘以步数就是后期plot中点的数目。
Q:仿真完成后plot对话框中的参数定义A:Vel _TM, 速度大小,标量;Vel _TX, X方向的速度;Vel _TY, Y方向的速度;Vel _TZ, Z方向的速度;ACC_RM 角加速度大的大小,标量;ACC_RX X方向的角加速度;ACC_RY Y方向的角加速度;ACC_RZ Z方向的角加速度;Q:join,contact,force的区别?A:force 就是力,也就是 F。
在RecurDyn 中力可以用公式或者方程来表示。
force 中有各种各样的力,例如spring ,bushing等。
Joint 就是约束,限制物体的自由度。
contact 是力的一种。
物体接触时候产生的力。
例如小球掉到地面上。
force 和 Joint 在一些极端的条件下可以等价的。
例如,绞结,你就可以用bushing 来代替,把绞结相应的刚度定义的非常大就可以了。
例如球绞结,他限制了物体连接处的 x,y,z 三个方向不能运动。
如果用bushing 来代替,你可以把bushing 的X,Y,Z 的刚度都定义到很大(10E9),这样,物体在x,y,z 方向的位移非常小了-〉0 。
相当于把x,y,z 都给限制住了。
Recurdyn导入和导出:Q:我可否直接导入用别的软件建立的实体模型?recurdyn导出的文件,别的仿真软件能用吗?A:可以直接导入UG,CATIA,Pro/E等建立的实体模型。
或者用x_t,STEP。
Recurdyn导出的CAD模型也可以在别的仿真软件使用。
Q:如何把ug的模型导入RECURDYN?A:Pro/E保存为STEP或者IGES格式的文件,直接导入Recurdyn。
Q:RecurDyn做的皮带模型能导入到ADAMS中去吗?A:应该不能,几何模型可以导过去,但是约束关系,contact 和force 等无法导过去。
因为在RecurDyn 中关于皮带,RecurDyn 有相应的算法,这些是adams没有的。
Q:如何实现RecurDyn与ADAMS两软件之间的数据转换?A:RecurDyn 中可以导入adams 的 adm 文件。
Q:从Ansys导入Adams的柔性体,需要建立interface nodes和刚性区域,导入RecurDyn 是否需要同样的处理?A:如果使用模态综合法,是一样的。
使用F-Flex,也可以在RecurDyn中建立多点约束。
Q:我模型分析完后 ,怎么把图表调出来放进word 里?A:可以导出图象的。
另外,也可以把数据导出,然后用origin或tecplot处理数据图。
Q:RFLEX导入ANSYS时,要求提供.rst .emat .cm .mp文件,如何生成?A:rst文件是计算后生成的结果文件;emat可以用ematwrite,yes命令计算后生成;mp文件可以用MPWRITE命令生成;cm用cmwrite命令生成。
网格划好后,建名为INTERFACE的COMPONENT,设NMODES的值,再执行RECURDYN带的MAC文件。
4个文件全有了。
Q:sdk文件为什么无法导入到一个已经存在的文件中?A:你试着导入*.rdsb子系统文件,链节就可以和子系统的任意部件用Connector连接了。
Q:如何把Ansys文件导入到RecurDYN的FFLEX模块中去?A:在前处理的Archive Model 下有个Write可以在这里输出你要的格式Q:NX Motion 的模型如何导入到 RecurDynA:从RD 7版本开始,NX MOTION的case,可以通过SDK 格式直接导入到RD。
Q: 在ANSYS中建立的模型,划分后有SHELL和BEAM,为什么导入RECURDYN后发现梁不见了?并且,壳体的几阶模态的振动形变都非常大?A:“发现梁不见”可能是没有选择对应的ANSYS单元类型,“模态的振动形变都非常大”请检查柔性体的单位制是否与希望的一致。
Q:在ansys里面模态分析之后导进recurdyn可以分析但是不能显示应力和应变,只能显示出来位移变化是怎么回事?A:模态文件里没包含应力模态和应变模态。
Q:我用ug导入后想把实体合成一个应该怎么操作?A:Tools->merge body。
如果不是合并成一个,要分成个部件,可以先用wireframe,在Database window单击时能清楚看到各个零件,选出你想要的组合体,这样做能节省组合的时间。
Q:曲线数据保存后发现没有时间数据?A:可能用的是export curve data,不是export data,所以没有。
帮助文档中有详述,将时间添加即可。
Q:在ansys中做过模态分析,导到Recurdyn中如何和其他刚体固定?A:(1) joint;(2) bushing (it's better)Q:RecurDyn可以和proe实现无缝集成吗?A:似乎没有无缝集成,要格式转化。
UG可以实现。
基本操作:Q:recurdyn运动分析中乱七八糟的连接线如何关闭?A:将view\icon size中的数值改小一些或将view\icon on/off中选项全部不选。
Q:应力图怎么显示?A:在 contour option 中设置。
Q:如何将导入的实体合并为一个?A:在TOOLs/Merge bodiesQ:怎么合并\隐藏和显示指定的part?A:隐藏操作:改变显示模式为Render Each object, 再右键body,选择Hide,就可以隐藏。
合并操作:使用Tools下的Merge Body。
再次显示就再右键body,选择其它的,或者换掉显示模式。
设置图层是最方便的,在右上角,不需要时把图层隐掉即可。
Q:recurdyn 中可以把两次或多次仿真后不同数据在一张plot中用曲线表示出来吗?A:在后处理中执file——>import——>你所要比较的文件*.rpltQ:怎么才能对多个相同元件进行独立设置参数?A:把要设置的参数前面的框框勾选去掉试试,应该是SPV的影响。
Q:recurdyn能将时域响应曲线转化为频域响应曲线吗?A:可以,在后处理对时域响应曲线进行FFT变换成频域响应曲线Q:为什么我的recurdyn中没有Boolean toolkit呢?A:Boolean toolkit是在body模式下才有的,如你建立一link,双击进入就有了Q:在RD中如何修改质心的位置?A: RD本身自带的材料库不能修改质心,但当你选择自定义的时候,先在对话框中选择“应用”,再选择“CM”,这时可以修改质心了。
Q:如何在RD的后处理中绘制自定义的MARKER的位移曲线呢?A:在model状态就可以看到Marker 点的位移曲线Q:怎么利用surface建立shell?A:用 Spline surface。
Q:RecurDyn中的Solid and Marker toolkit在哪里?A:路径为body>general>Solid and MarkerQ:请问我的界面左侧怎么没有gear选项啊?A:点左侧界面中的subsystem---Gear,进入子系统就有了Q:Recurdyn模型质心的确定?A:Tools | measure |mass propertyQ:怎样在recurdyn中精确移动物体A:可以点击工具栏中间中的Object Control按钮或者在菜单栏中Edit->Object Control->Basic,就可以实现精确的三维平移和转动Q:为什么我每次打开一个recurdyn文件,关闭后都会生成一个相同的文件,文件名为原来的文件名_autobackup?A:在settings---->programme settings 里面设置Q:请问在RECURDYN中如何将更改模型单位,改了几次都变回去了A:使用新的单位开一个新的模型,把老的模型复制一下,然后再拷贝到新的模型中,就可以了。