机器人学导论第六章
- 格式:ppt
- 大小:1.17 MB
- 文档页数:44
第六章 机器人运动学及动力学6.1 引论到现在为止我们对操作机的研究集中在仅考虑动力学上。
我们研究了静力位置、静力和速度,但我们从未考虑过产生运动所需的力。
本章中我们考虑操作机的运动方程式——由于促动器所施加的扭矩或作用在机械手上的外力所产生的操作机的运动之情况。
机构动力学是一个已经写出很多专著的领域。
的确,人们可以花费以年计的时间来研究这个领域。
显然,我们不可能包括它所应有的完整的内容。
但是,某种动力学问题的方程式似乎特别适合于操作机的应用。
特别是,那种能利用操作机的串联链性质的方法是我们研究的天然候选者。
有两个与操作机动力学有关的问题我们打算去解决。
向前的动力学问题是计算在施加一组关节扭矩时机构将怎样运动。
也就是,已知扭矩矢量τ,计算产生的操作机的运动Θ、Θ和Θ。
这个对操作机仿真有用,在逆运动学问题中,我们已知轨迹点Θ、Θ和Θ,我们欲求出所需要的关节扭矩矢量τ。
这种形式的动力学对操作机的控制问题有用。
6.2 刚体的加速度现在我们把对刚体运动的分析推广到加速度的情况。
在任一瞬时,线速度矢量和角速度矢量的导数分别称为线加速度和角加速度。
即BB Q Q BBQ Q 0V ()V ()d V V lim dt t t t t t∆→+∆-==∆ (6-1)和AA Q Q AAQ Q 0()()d lim dt t t t t t∆→Ω+∆-ΩΩ=Ω=∆ (6-2)正如速度的情况一样,当求导的参坐标架被理解为某个宇宙标架{}U 时我们将用下面的记号U A AORG V V = (6-3)和U A A ω=Ω (6-4)6.2.1 线加速度我们从描述当原点重合时从坐标架{}A 看到的矢量BQ 的速度AA B A A Q B Q B B V V BR R Q =+Ω⨯ (6-5)这个方程的左手边描述AQ 如何随时间而变化。
所以,因为原点是重合的,我们可以重写(6-5)为A AB A A B B Q B B d ()V dtB B R Q R R Q =+Ω⨯ (6-6) 这种形式的方程式当推导对应的加速度方程时特别有用。
(人工智能)人工智能机器人学导论人工智能机器人学导论1简介:1作者简介2机器人控制器和程序设计3简介:3机器人制作入门篇6简介:6作者简介6机器人智能控制工程8简介:8人工智能机器人学导论作者:Ricky文章来源:本站原创更新时间:2006年05月03日打印此文浏览数:2370 SlidesforSecondEdition(Beta)Chapter1:WhatareRobots?.pptslidesandthepdfversion(goodaquicklook) Chapter2:Telesystems.thepdfversionChapter3:BiologicalFoundationsoftheReactiveParadigm.pptslidesandpdfversion Chapter5:TheReactiveParadigmChapter6:SelectingandCombiningBehaviorsChapter7:CommonSensorsandSensingTechniquesChapter8:DesigningaBehavior-BasedImplementationChapter9:Multi-AgentsChapter10:NavigationandtheHybridParadigmChapter11:TopologicalPathPlanningChapter12:MetricPathPlanningChapter13:LocalizationandMappingChapter14:AffectiveRobotsChapter15:Human-RobotInteractionChapter16:WhatCanRobotDoandWhatWillTheyBeAbletoDo?简介:本书系统地介绍了人工智能机器人于感知、导航、路径规划、不确定导航等领域的主要内容。
全书共分俩大部分。

机器人学导论作业答案作业一一、问答题1.答:机器人的主要应用场合有:(1) 恶劣的工作环境和危险工作;(2) 在特殊作业场合进行极限作业;(3) 自动化生产领域;(4) 农业生产;(5) 军事应用。
2.答:工业机器人(英语:industrial robot。
简称IR)是广泛适用的能够自主动作,且多轴联动的机械设备。
它们在必要情况下配备有传感器,其动作步骤包括灵活的转动都是可编程控制的(即在工作过程中,无需任何外力的干预)。
它们通常配备有机械手、刀具或其他可装配的的加工工具,以及能够执行搬运操作与加工制造的任务。
数控机床是数字控制机床的简称,是一种装有程序控制系统的自动化机床。
该控制系统能够逻辑地处理具有控制编码或其他符号指令规定的程序,并将其译码,从而使机床动作并加工零件。
3.答:科幻作家阿西莫夫机器人三原则:(1) 不伤害人类;(2) 在原则下服从人给出的命令;(3) 在与上两个原则不矛盾的前提下保护自身。
我国科学家对机器人的定义是:“机器人是一种自动化的机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器。
4.答:机器人研究的基础内容有以下几方面:(1) 空间机构学;(2) 机器人运动学;(3) 机器人静力学;(4) 机器人动力学;(5) 机器人控制技术;(6) 机器人传感器;(7) 机器人语言。
5.答:按几何结构分:(1) 直角坐标式机器人;(2) 圆柱坐标式机器人;(3) 球面坐标式机器人;(4) 关节式球面坐标机器人。
6.答:通常由四个相互作用的部分组成:执行机构、驱动单元、控制系统、智能系统。
7.答:一共需要5个:定位3个,放平稳2个。
8.答:机器人的主要特点有通用性、适应性。
决定通用性有两方面因素:机器人自由度;末端执行器的结构和操作能力。
9.答:工业机器人的手部是用来握持工件或工具的部件。
大部分的手部结构都是根据特定的工件要求而专门设计的。
第一章绪论1.机器人三守则:1)机器人必须不危害人类,也不允许它眼看人将受害而袖手旁观;2)机器人必须绝对服从于人类,除非这种服从有害于人类;3)机器人必须保护自身不受伤害,除非为了保护人类或是为人类做出牺牲。
2.机器人的定义共同处:1)像人或人的上肢,并能模仿人的动作;2)具有智力或感觉与识别能力;3)是人造的机器或机械电子装置。
3.机器人的主要特点:①通用性:机器人的通用性取决于其几何特性和机械能力。
通用性指的是执行不同的功能和完成多样的简单任务的实际能力。
通用性也意味着,机器人具有可变的几何结构。
②适应性:机器人的适应性是指其对环境的自适应能力,即所设计的机器人能够自我执行未经完全指定的任务,而不管任务执行过程中所发生的没有预计到的环境变化。
这一能力要求机器人认识其环境,即具有人工知觉。
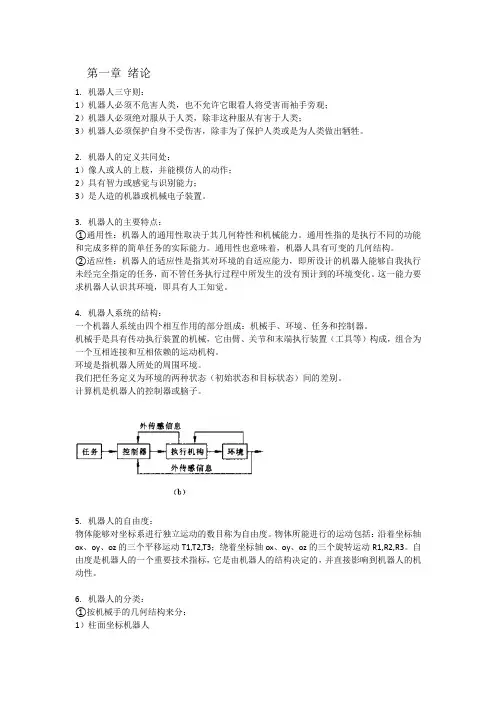
4.机器人系统的结构:一个机器人系统由四个相互作用的部分组成:机械手、环境、任务和控制器。
机械手是具有传动执行装置的机械,它由臂、关节和末端执行装置(工具等)构成,组合为一个互相连接和互相依赖的运动机构。
环境是指机器人所处的周围环境。
我们把任务定义为环境的两种状态(初始状态和目标状态)间的差别。
计算机是机器人的控制器或脑子。
5.机器人的自由度:物体能够对坐标系进行独立运动的数目称为自由度。
物体所能进行的运动包括:沿着坐标轴ox、oy、oz的三个平移运动T1,T2,T3;绕着坐标轴ox、oy、oz的三个旋转运动R1,R2,R3。
自由度是机器人的一个重要技术指标,它是由机器人的结构决定的,并直接影响到机器人的机动性。
6.机器人的分类:①按机械手的几何结构来分:1)柱面坐标机器人2)球面坐标机器人3)关节式球面坐标机器人②按机器人的控制方式分:1)非伺服机器人:工作能力有限,按照预先编好的程序顺序工作2)伺服控制机器人:有更强的工作能力,反馈控制系统③按机器人的智能程度分:1)一般机器人,不具有智能,只具有一般编程能力和操作功能2)智能机器人,具有不同程度的智能,又可分为传感型机器人、交互型机器人、自立型机器人。
机器人学导论chapter6Manipulator DynamicsOutlineIntroduction运动学控制Why do we need to study the dynamics 4Given a set of force or torques applied the manipulator, try to calculate how the manipulator Given a desired trajectory, try to find out the desired torque inputs to cause this motion. E.g.: ControlContents of Dynamics:5RobotTwo methods for formulating dynamics model :OutlineAcceleration of a Rigid Bodycalled linear acceleration /angular acceleration :Vectors of linear acceleration / angular acceleration can be described in different reference frame1.Linear acceleration of rigid body:9frame {A} and frame {B} have coincident origins, the velocity This form of the equation will be useful when deriving the corresponding acceleration equation.1.Linear acceleration of rigid body:10By differentiating1.Linear acceleration of rigid body:11origins are not coincident, we add one term which gives the origin of {B}:The above equation will be utilized to calculate thelinear acceleration of a manipulator (both revolute joint and prismatic joint). 2.Angular acceleration of rigid body: Consider that frame {B} rotate with respect to frame {A} with and frame {C} rotate with respect to frame {B} with , we can obtain:By differentiating:Applying equation (6.6):This equation will be utilized to calculate the angularacceleration of the links of a manipulator.Outline Mass DistributionMass Distributionexpressed in the following matrix form:whereMass moments of inertia Mass products of inertia Mass Distribution16As note, the inertia tensor is a functionof the location and orientation of thereference frame.{C}Where {C} is located at the center ofmass of the body.Mass Distributionwhereparallel-axis theorem:If the reference frame {C}(body frame) are selected such that theproducts of inertia being set to zero, the axes of this reference frameare called “principal axes(主轴)”, and the mass moment arenoted as “principal moments of inertia(主惯性矩)”.Outline1. Newton-Euler Dynamic Formulation 19rate of change of the linearmomentum is equal to theapplied forceLinear Momentum (动量) 1. Newton-Euler Dynamic Formulation 20Angular Momentum (角动量)Inertia Tensor1. Newton-Euler Dynamic Formulation where m is the mass of a rigid body, represent inertia tensor , F C is the external force on the center of gravity, N is the torque on the rigid body, v C represent the translational velocity , while ω is the angular velocity .2. Iterative (递推)Newton-Euler Dynamic Formulation 2.1 Compute velocities and accelerations Angular velocity from link to link:By differentiating:When joint i +1 is prismatic:2. Iterative (递推)Newton-Euler Dynamic Formulation The linear velocity of each link-frame origin:By differentiating: When joint i +1 is prismatic:The linear acceleration of the center of mass of each link:2. Iterative (递推)Newton-Euler Dynamic Formulation2. Iterative (递推)Newton-Euler Dynamic Formulation The torque-balance relationship for link i :2. Iterative (递推)Newton-Euler Dynamic Formulation 26Rearrange the force and torque equations:These equations are evaluated link by link, starting from linkn and working inward toward the base of the robot (inward force iterations ).2. Iterative (递推)Newton-Euler Dynamic Formulation As in the static case, the required joint torque are Found by taking the component of the torque Applied by one link on its neighbor: prismatic:2. Iterative (递推)Newton-Euler Dynamic Formulation 28Outward iterations: i: 0→n292. Iterative (递推)Newton-Euler Dynamic Formulation 2. Iterative (递推)Newton-Euler Dynamic Formulation Inward iterations: i: n →1移动关节转动关节2. Iterative (递推)Newton-Euler Dynamic Formulation32Newton-Euler Formulation of Manipulator Dynamics All mass exists as a point mass : The vectors that locate the Center of mass for each link:The inertia tensor for each link:33Newton-Euler Formulation of Manipulator Dynamics : There are no force acting on the end-effector:The base of the robot is not rotating:To include gravity force, we will use:34Newton-Euler Formulation of Manipulator Dynamics : The rotation between successive 35Newton-Euler Formulation of Manipulator Dynamics iteration for link 1:36Newton-Euler Formulation of Manipulator Dynamics iteration for37Newton-Euler Formulation of Manipulator Dynamics iteration for 38Newton-Euler Formulation of Manipulator Dynamics : The outward iteration for 39Newton-Euler Formulation of Manipulator Dynamics Example:Step 4: The outward iteration for link 2:40Newton-Euler Formulation of Manipulator Dynamics : The outward iteration for link 2:41Newton-Euler Formulation of Manipulator Dynamics : The inward iteration for 42Newton-Euler Formulation of Manipulator DynamicsNewton-Euler Formulation of Manipulator Dynamics 44Newton-Euler Formulation of Manipulator Dynamics torque: Written in Matrices Form:Newton-Euler Formulation of Manipulator Dynamics Example:有效惯量(effective inertial):关节i 的加速度在关节i 上产生的惯性力Newton-Euler Formulation of Manipulator Dynamics 耦合惯量(coupled inertial):关节i,j 的加速度在关节j ,i 上产生的惯性力Newton-Euler Formulation of Manipulator Dynamics 向心加速度(acceleration centripetal)系数关节i,j 的速度在关节j ,i 上产生的向心力Newton-Euler Formulation of Manipulator Dynamics 哥氏加速度(Coriolis accelaration)系数:关节j,k 的速度引起的在关节i 上产生的哥氏力(Coriolis force)Newton-Euler Formulation of Manipulator Dynamics 重力项(gravity):关节i,j 处的重力OutlineLagrangian Formulation of Manipulator Dynamics 51Lagrangian Formulation of Manipulator Dynamics522-links manipulatorand Potential Energy Lagrangian Formulation of Manipulator Dynamics 53Example:2-links manipulatorKinetic Energy K 2 and Potential Energy P 2 of link 2:where Lagrangian Formulation of Manipulator Dynamics542-links manipulatorLagrangian Formulation of Manipulator Dynamics55OutlineFormulation Manipulator Dynamics in Cartesian Space The above dynamic equations is developed interms of the manipulator joint angles (jointspace).We could use the serial-link nature ofmechanism to advantage in deriving theequations.Sometimes, it might be desirable to express thedynamics with respect to Cartesian variablesform.57Formulation Manipulator Dynamics in Cartesian Space58 whereSummarySummarize steps to form Lagrangian Equation of n-link。