机器人学导论第5章1
- 格式:ppt
- 大小:597.00 KB
- 文档页数:45
机器人学导论第4版课后答案第五章在机械传动的系统中,摩擦是必不可少的。
利用这种摩擦进行制动器运动和驱动传动,可使机械传动系统中的齿轮保持不变。
此外,通过磨擦还可产生机械震动和压力。
如果使驱动元件和传动件在轴上接触而摩擦时产生了热量,则会引起零部件上的油质过氧化,同时因摩擦带来的热量也会被传递到空气中去,这就是所谓的油氧化反应。
油氧化反应发生时产生各种化学作用和物理效应,如:油脂氧化、氧自由基分解以及其他一些化学反应。
为了降低能源消耗,人们就利用电磁铁等辅助设备进行电机和直流电弧的电磁场传播及热能的传递。
同时使用电动机带动机械装置实现制动与转动(用滚动轴承代替齿轮驱动机械装置)、滑动变速等过程。
(1)润滑在机械传动系统中的作用润滑是机械传动系统得以正常运行和保证精度的重要保证,也是重要的节能措施。
在机械传动系统中,一般可分为两种类型:①摩擦式:利用轴承上的油脂润滑滚动轴承运转的方法;②滑动式:利用滑动轴承外圈与滚珠之间的摩擦力来驱动运转。
摩擦式与滑动轴承摩擦力大,但传动精度高。
滑动式以滑动轴承为轴心轴向进行传动,由于摩擦产生的热量可传递到空气中去。
滑动式利用液体润滑元件代替了滚动轴承;滑动式同时也由润滑元件代替了滑动轴承和滚珠轴承。
(2)根据润滑与传热的关系,将滑动变速法分为()。
A.摩擦-传热:利用润滑系统中摩擦材料不产生热量,仅在零件表面形成均匀温润的油膜以增加润滑强度。
B.电弧摩擦:利用电弧来能量传递。
C.电磁力摩擦:利用电磁力来改变电动机的转速使其不停转动(转)。
D.机械滑动变速法:利用机械滑动来改变电动机和负载之间的转速。
【答案】 B 【解析】根据润滑与传热关系,将滑动变速法分为摩擦-传热-滚动-制动-滑动变速法)。
故本题选 B.。
本题中轴承润滑与传热均起到传热传质等作用,因此不属于滑动变速法。
(3)下面我们来具体介绍一下摩擦原理中的摩擦现象是怎样发展来的:早在18世纪,英国天文学家便发现了太阳系的中心——日心在东偏南方向上移动得很快的现象,这被认为是太阳系诞生时一个重要的物理现象。
(人工智能)人工智能机器人学导论人工智能机器人学导论1简介:1作者简介2机器人控制器和程序设计3简介:3机器人制作入门篇6简介:6作者简介6机器人智能控制工程8简介:8人工智能机器人学导论作者:Ricky文章来源:本站原创更新时间:2006年05月03日打印此文浏览数:2370 SlidesforSecondEdition(Beta)Chapter1:WhatareRobots?.pptslidesandthepdfversion(goodaquicklook) Chapter2:Telesystems.thepdfversionChapter3:BiologicalFoundationsoftheReactiveParadigm.pptslidesandpdfversion Chapter5:TheReactiveParadigmChapter6:SelectingandCombiningBehaviorsChapter7:CommonSensorsandSensingTechniquesChapter8:DesigningaBehavior-BasedImplementationChapter9:Multi-AgentsChapter10:NavigationandtheHybridParadigmChapter11:TopologicalPathPlanningChapter12:MetricPathPlanningChapter13:LocalizationandMappingChapter14:AffectiveRobotsChapter15:Human-RobotInteractionChapter16:WhatCanRobotDoandWhatWillTheyBeAbletoDo?简介:本书系统地介绍了人工智能机器人于感知、导航、路径规划、不确定导航等领域的主要内容。
全书共分俩大部分。


第一章绪论1.机器人三守则:1)机器人必须不危害人类,也不允许它眼看人将受害而袖手旁观;2)机器人必须绝对服从于人类,除非这种服从有害于人类;3)机器人必须保护自身不受伤害,除非为了保护人类或是为人类做出牺牲。
2.机器人的定义共同处:1)像人或人的上肢,并能模仿人的动作;2)具有智力或感觉与识别能力;3)是人造的机器或机械电子装置。
3.机器人的主要特点:①通用性:机器人的通用性取决于其几何特性和机械能力。
通用性指的是执行不同的功能和完成多样的简单任务的实际能力。
通用性也意味着,机器人具有可变的几何结构。
②适应性:机器人的适应性是指其对环境的自适应能力,即所设计的机器人能够自我执行未经完全指定的任务,而不管任务执行过程中所发生的没有预计到的环境变化。
这一能力要求机器人认识其环境,即具有人工知觉。
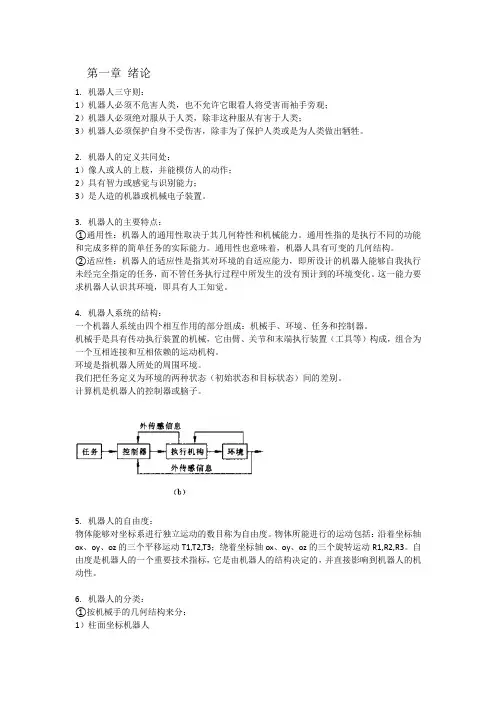
4.机器人系统的结构:一个机器人系统由四个相互作用的部分组成:机械手、环境、任务和控制器。
机械手是具有传动执行装置的机械,它由臂、关节和末端执行装置(工具等)构成,组合为一个互相连接和互相依赖的运动机构。
环境是指机器人所处的周围环境。
我们把任务定义为环境的两种状态(初始状态和目标状态)间的差别。
计算机是机器人的控制器或脑子。
5.机器人的自由度:物体能够对坐标系进行独立运动的数目称为自由度。
物体所能进行的运动包括:沿着坐标轴ox、oy、oz的三个平移运动T1,T2,T3;绕着坐标轴ox、oy、oz的三个旋转运动R1,R2,R3。
自由度是机器人的一个重要技术指标,它是由机器人的结构决定的,并直接影响到机器人的机动性。
6.机器人的分类:①按机械手的几何结构来分:1)柱面坐标机器人2)球面坐标机器人3)关节式球面坐标机器人②按机器人的控制方式分:1)非伺服机器人:工作能力有限,按照预先编好的程序顺序工作2)伺服控制机器人:有更强的工作能力,反馈控制系统③按机器人的智能程度分:1)一般机器人,不具有智能,只具有一般编程能力和操作功能2)智能机器人,具有不同程度的智能,又可分为传感型机器人、交互型机器人、自立型机器人。