第二章 机电传动系统的动力学基础分析
- 格式:ppt
- 大小:1.59 MB
- 文档页数:28
习题与思考题第二章机电传动系统的动力学基础说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是由电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。
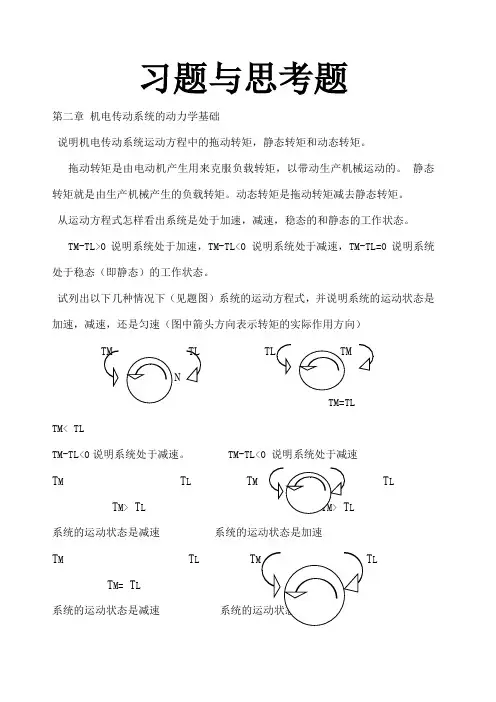
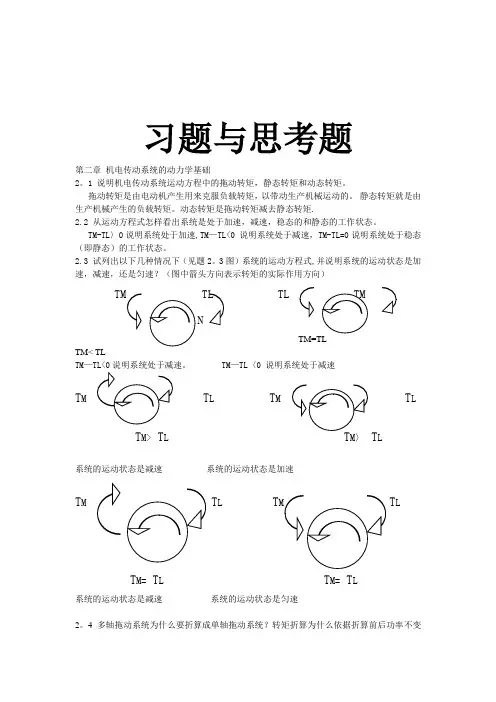
试列出以下几种情况下(见题图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速(图中箭头方向表示转矩的实际作用方向)TM< TLTM-TL<0说明系统处于减速。
TM-TL<0 说明系统处于减速T M T L T M T LT M> T L系统的运动状态是减速系统的运动状态是加速T M T L T T L T M= T系统的运动状态是减速多轴拖动系统为什么要折算成单轴拖动系统转矩折算为什么依据折算前后功率不变的原则转动惯量折算为什么依据折算前后动能不变的原则因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω, p 不变。
转动惯量折算前后动能不变原则是能量守恒MV=ω2为什么低速轴转矩大,高速轴转矩小因为P= Tω,P不变ω越小T越大,ω越大T 越小。
为什么机电传动系统中低速轴的GD2比高速轴的GD2大得多因为P=Tω,T=GD2/375. P=ωGD2/375. ,P不变转速越小GD2越大,转速越大GD2越小。
如图(a)所示,电动机轴上的转动惯量J M=, 转速n M=900r/min; 中间传动轴的转动惯量J L=16kgm2,转速n L=60r/min。
习题与思考题第二章机电传动系统的动力学基础2。
1 说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是由电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩.2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL〉0说明系统处于加速,TM—TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。
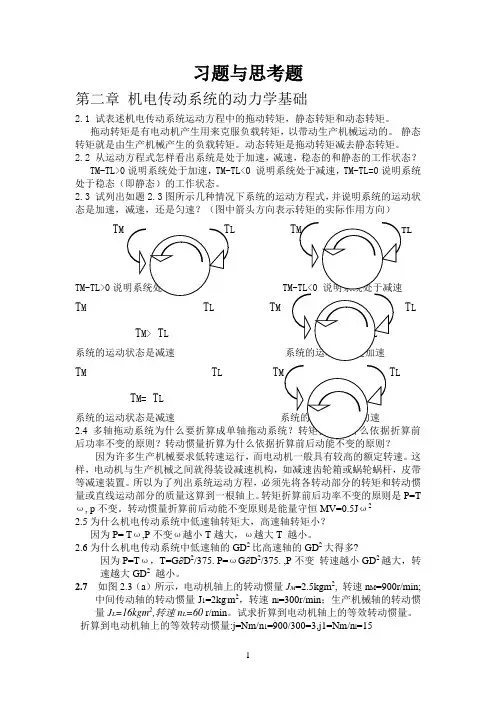
2.3 试列出以下几种情况下(见题2。
3图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头方向表示转矩的实际作用方向)TM=TLTM< TLTM—TL<0说明系统处于减速。
TM—TL〈0 说明系统处于减速T M T L T M T LT M> T L M〉L系统的运动状态是减速系统的运动状态是加速T M T L T T LT M= T L T M= T L系统的运动状态是减速系统的运动状态是匀速2。
4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速.这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置.所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω,p不变.转动惯量折算前后动能不变原则是能量守恒MV=0。
5Jω22.5为什么低速轴转矩大,高速轴转矩小?因为P= Tω,P不变ω越小T越大,ω越大T 越小.2.6为什么机电传动系统中低速轴的GD2比高速轴的GD2大得多?因为P=Tω,T=G∂D2/375. P=ωG∂D2/375. ,P不变转速越小GD2越大,转速越大GD2越小。
习题与思考题第二章机电传动系统的动力学基础2.1 试表述机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是有电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态?TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。
2.3 试列出如题2.3图所示几种情况下系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头方向表示转矩的实际作用方向)T M TTM-TL>0T M T L T M T LT M> T系统的运动状态是减速T M T L T T L T M= T系统的运动状态是减速2.4因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω, p不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω22.5为什么机电传动系统中低速轴转矩大,高速轴转矩小?因为P= Tω,P不变ω越小T越大,ω越大T 越小。
2.6为什么机电传动系统中低速轴的GD2比高速轴的GD2大得多?因为P=Tω,T=G∂D2/375. P=ωG∂D2/375. ,P不变转速越小GD2越大,转速越大GD2越小。
2.7 如图2.3(a)所示,电动机轴上的转动惯量J M=2.5kgm2, 转速n M=900r/min;中间传动轴的转动惯量J1=2kg.m2,转速n l=300r/min;生产机械轴的转动惯量J L=16kgm2,转速n L=60 r/min。
第二章 机电传动系统的动力学基础
2—1 试列出如图所示几种情况下系统的运动方程式,并说明系统的运行状态是加减速还是匀速?(图中箭头方向表示转矩的实际作用方向)
提示:根据转矩正方向的约定, dt
dn GD T T L M 3752=-中T M 、T L 的符号可正可负。
2—2 为什么在一个机电传动系统中低速轴的转矩大?高速轴的转矩小? 提示:依据系统传递功率不变的原则进行分析。
2—3 如图所示,电动机轴上的转动惯量J M =2.5kg ·m 2,转速n M =900r /mim ;中间传动轴的转动惯量J 1=2kg ·m 2,转速n 1=300r /min ;生产机械轴的转动惯量五J L =16kg ﹒m 2,转速n L =60r /min 。
试求折算到电动机轴上的等效转动惯量。
2—4 如图所示为提升机构传动系统,电动机转速n M =950r /mim ,齿轮减速箱的传动比j 1=j 2=4,卷筒直径D=0.24m ,滑轮的减速比j 3=2,起重负载力F=100N ,
电动机的飞轮转矩2205.1m N GD M ∙=,齿轮、滑轮和卷筒总的传动效率为0.83。
试求提升速度v 和折算到电动机轴上的静态转矩T L 以及折算到电动机轴上整个
拖动系统的等效飞轮惯量2Z GD 。
2—5 在下图中,曲线1和2分别为电动机和负载的机械特性,试判断哪些是系统的稳定平衡点?哪些不是?。
机电传动控制课后习题答案Standardization of sany group #QS8QHH-HHGX8Q8-GNHHJ8-HHMHGN#习题与思考题第二章机电传动系统的动力学基础说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是有电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。
试列出以下几种情况下(见题图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速(图中箭头方向表示转矩的实际作用方向)TM-TL>0TM= TL TM= TL系统的运动状态是减速系统的运动状态是匀速如图(a)所示,电动机轴上的转动惯量J M=, 转速n M,转速n L=60 r/min。
试求折算到电动机轴上的等效专惯量。
折算到电动机轴上的等效转动惯量J=JM+J1/j2+ JL/j12=+2/9+16/225=.如图(b)所示,电动机转速n M=950 r/min,齿轮减速箱的传动比J1= J2=4,卷筒直径D=,滑轮的减速比J3=2,起重负荷力 F=100N,电动机的费轮转距GD2M= m2, 齿轮,滑轮和卷筒总的传动效率为。
试球体胜速度v和折算到电动机轴上的静态转矩T L以及折算到电动机轴上整个拖动系统的飞轮惯量GD2z.。
ωM=*2n/60= rad/s.提升重物的轴上的角速度ω=ωM/j1j2j3=4*4*2=sv=ωD/2=2*=sT L=ηC n M=*100**950=GD2Z=δGD M2+ GD L2/j L2=*+100*322=在题图中,曲线1和2分别为电动机和负载的机械特性,试判断哪些是系统的稳定平衡点哪些不是交点是系统的稳定平衡点. 交点是系统的平衡点交点是系统的平衡交点不是系统的平衡点交点是系统的平衡点第三章一台他励直流电动机的技术数据如下:P N=,U N=220V, I N=, n N=1500r/min, R a =Ω,试计算出此电动机的如下特性:①固有机械特性;②电枢服加电阻分别为3Ω和5Ω时的人为机械特性;③电枢电压为U N/2时的人为机械特性;④磁通φ=φN时的人为机械特性;并绘出上述特性的图形。
习题与思考题第二章机电传动系统的动力学基础2.1 说明机电传动系统运动方程中的拖动转矩,静态转矩和动态转矩。
拖动转矩是有电动机产生用来克服负载转矩,以带动生产机械运动的。
静态转矩就是由生产机械产生的负载转矩。
动态转矩是拖动转矩减去静态转矩。
2.2 从运动方程式怎样看出系统是处于加速,减速,稳态的和静态的工作状态。
TM-TL>0说明系统处于加速,TM-TL<0 说明系统处于减速,TM-TL=0说明系统处于稳态(即静态)的工作状态。
2.3 试列出以下几种情况下(见题2.3图)系统的运动方程式,并说明系统的运动状态是加速,减速,还是匀速?(图中箭头方向表示转矩的实际作用方向)TM TL TM TLNTM=TL TM< TLTM-TL>0说明系统处于加速。
TM-TL<0 说明系统处于减速TM TL TM TLTM> TL TM> TL系统的运动状态是减速系统的运动状态是加速TM TL TM TL TM= TL TM= TL系统的运动状态是减速系统的运动状态是匀速2.4 多轴拖动系统为什么要折算成单轴拖动系统?转矩折算为什么依据折算前后功率不变的原则?转动惯量折算为什么依据折算前后动能不变的原则?因为许多生产机械要求低转速运行,而电动机一般具有较高的额定转速。
这样,电动机与生产机械之间就得装设减速机构,如减速齿轮箱或蜗轮蜗杆,皮带等减速装置。
所以为了列出系统运动方程,必须先将各转动部分的转矩和转动惯量或直线运动部分的质量这算到一根轴上。
转矩折算前后功率不变的原则是P=Tω, p不变。
转动惯量折算前后动能不变原则是能量守恒MV=0.5Jω22.5为什么低速轴转矩大,高速轴转矩小?因为P= Tω,P不变ω越小T越大,ω越大T 越小。
2.6为什么机电传动系统中低速轴的GD2逼高速轴的GD2大得多?因为P=Tω,T=G∂D2/375. P=ωG∂D2/375. ,P不变转速越小GD2越大,转速越大GD2越小。