RaceKing技术报告
- 格式:pdf
- 大小:878.59 KB
- 文档页数:45

STEM超级跑鞋技术流程设计报告英文回答:Ladies and Gentlemen of the esteemed design review board, please allow me to unveil the intricate technical process that underpins our revolutionary STEM Supercar shoe.1. Concept Ideation and Research:Embarking on an extensive research journey, we meticulously analyzed biomechanics, material science, and aerodynamic principles.Through rigorous simulations and prototyping, werefined our design to maximize performance and aesthetics.2. Material Selection and Optimization:Our shoe boasts a cutting-edge composite sole crafted from a proprietary blend of carbon fiber and thermoplasticpolyurethane (TPU).This lightweight and durable material provides exceptional energy return, minimizing fatigue during extended runs.3. Smart Sensor Integration:To enhance performance monitoring and personalization, we seamlessly integrated advanced sensors into the shoe.These sensors monitor vital metrics such as stride length, cadence, and plantar pressure, enabling runners to track progress and fine-tune their technique.4. Aerodynamic Design:Inspired by the sleek lines of high-performance vehicles, we optimized the shoe's aerodynamic profile.Meticulously engineered vents and channels reduce drag and enhance breathability, allowing for effortless strides.5. Comfort and Durability:We prioritize runner comfort with a breathable mesh upper and an ergonomically designed footbed.Reinforcements in key areas ensure durability without compromising flexibility, extending the lifespan of our shoes.6. Customization and Personalization:Recognizing the unique needs of every runner, we offer a range of customization options.Customizable lacing systems, interchangeable insoles, and personalized color schemes empower runners to create a shoe that perfectly aligns with their preferences.7. Manufacturing Excellence:Our shoes are meticulously crafted using state-of-the-art manufacturing techniques.Precision molding and advanced materials manipulation ensure the highest level of quality and consistency.8. User Experience and Testing:Before releasing our shoes to the market, we engage in rigorous testing with elite athletes and everyday runners.Their feedback helps us refine the design, optimize performance, and deliver an unparalleled running experience.9. Continuous Innovation:Our commitment to innovation does not end with the launch of the STEM Supercar shoe.We continuously explore new technologies and materialsto push the boundaries of running footwear.Conclusion:The STEM Supercar shoe represents the pinnacle of engineering and innovation in the running industry. Its meticulously designed features empower runners to unleash their full potential and achieve their running goals with unprecedented efficiency, comfort, and style. We are confident that this shoe will revolutionize the way we experience the joy of running.中文回答:各位尊敬的设计评审委员会成员,请允许我揭晓我们突破性STEM 跑鞋背后错综复杂的工艺流程。
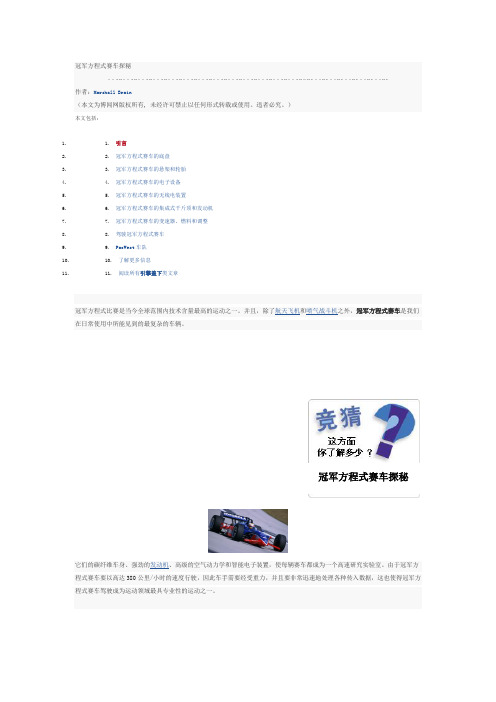
冠军方程式赛车探秘作者:Marshall Brain(本文为博闻网版权所有, 未经许可禁止以任何形式转载或使用。
违者必究。
)本文包括: 1.1. 引言2.2. 冠军方程式赛车的底盘3.3. 冠军方程式赛车的悬架和轮胎4.4. 冠军方程式赛车的电子设备5.5. 冠军方程式赛车的无线电装置6.6. 冠军方程式赛车的集成式千斤顶和发动机7.7. 冠军方程式赛车的变速器、燃料和调整 8. 8. 驾驶冠军方程式赛车 9.9. PacWest 车队 10.10. 了解更多信息 11. 11. 阅读所有引擎盖下类文章它们的碳纤维车身、强劲的发动机、高级的空气动力学和智能电子装置,使每辆赛车都成为一个高速研究实验室。
由于冠军方程式赛车要以高达380公里/小时的速度行驶,因此车手需要经受重力,并且要非常迅速地处理各种传入数据,这也使得冠军方程式赛车驾驶成为运动领域最具专业性的运动之一。
冠军方程式赛车探秘您是否曾经想过走进幕后去了解真实的冠军方程式比赛。
这些不可思议的赛车和发动机来自哪里?车手是如何成为车手的,以及他们是如何为每场比赛进行训练的?车队中都有那些成员,以及在每次比赛之前和比赛期间都由谁来操作这些赛车?比赛当天加油站又会发生什么情况?为了回答类似的这些问题,并真正了解一个完整的冠军方程式车队是如何工作的,我们将介绍赛车、车手以及摩托罗拉PacWest 车队的组成成员。
本文中,您将以摩托罗拉PacWest车队的视角去了解使冠军方程式赛车工作的所有方面。
冠军方程式比赛是一项独特的运动。
它是在美国和全球范围内举行的新奇、高速并采用开放式车轮的赛车比赛。
CART计划融合了一级方程式比赛风格和椭圆赛道的特点,在四种迥异的赛道上进行比赛:短椭圆赛道——总长度不足3.2公里的椭圆赛道超级赛场——总长度不低于3.2公里的椭圆赛道街道赛道——在城市街道设置的赛道公路赛道——有街道赛道的感觉(许多急转弯和短直道),但在专门封闭的赛道而非城市街道上行驶赛道类型随每场比赛变化——冠军方程式比赛是一项非常复杂多变的运动。

弹球王实验报告一、引言弹球王是一种以进球为目标的游戏,它能够锻炼人们的反应能力、手眼协调能力和判断能力。
本实验旨在通过设计和实现一个弹球王游戏,评估玩家的表现并探讨游戏规则与玩家表现之间的关系。
二、实验设计2.1 实验目标本实验的主要目标是评估玩家在弹球王游戏中的表现指标,包括进球数、击中率和游戏得分。
通过这些指标的分析,可以了解玩家在不同条件下的表现情况,进一步研究游戏规则对玩家表现的影响。
2.2 实验步骤1.设计弹球王游戏界面和规则2.编写程序实现弹球王游戏3.招募测试参与者并进行实验4.记录测试参与者的表现指标数据5.分析数据并得出结论2.3 实验材料和设备•电脑•编程软件•实验记录表•测试参与者招募广告三、实验结果与分析3.1 参与者表现指标数据以下是10名测试参与者的表现指标数据:参与者编号进球数击中率 (%) 得分1 20 80 5002 15 60 4003 25 100 6004 18 72 4505 22 88 5506 19 76 4807 21 84 5208 17 68 4309 23 92 57010 16 64 4103.2 数据分析根据实验结果,在弹球王游戏中,参与者的进球数集中在15到25之间,平均进球数为19.5。
击中率平均值为77%,得分平均值为490。
通过对数据进行进一步分析,可以发现参与者编号3和9在进球数、击中率和得分三个指标上表现最好,其次是参与者5和7;而参与者2和10在三个指标上表现最差。
3.3 结论根据实验结果的分析,可以得出以下结论: 1. 弹球王游戏具有一定的难度,参与者的表现指标具有一定的差异。
2. 进球数、击中率和得分是评估参与者表现的重要指标。
3. 参与者的表现与其个人能力和游戏规则之间存在一定的关系。
四、结论与展望本实验通过设计和实现了一个弹球王游戏,并对测试参与者的表现进行了评估和分析。
实验结果显示,参与者在进球数、击中率和得分等指标上表现出一定的差异。

第三届全国大学生“飞思卡尔”杯智能汽车竞赛获奖名单1 组织贡献奖东北赛区承办学校东北大学华北赛区承办学校天津大学华东赛区承办学校合肥工业大学华南赛区承办学校武汉科技大学总决赛承办学校东北大学2 优秀论文奖3 第三届全国大学生“飞思卡尔”杯智能汽车竞赛特等奖共计6支队伍摄像头组特等奖名次学校名称队伍名称比赛成绩指导教师学生1 东北大学猎豹18.388 张云洲师恩义俞雪婷白秋石2 北京科技大学北京科技大学CCD一队18.464 刘立马飞张鹏任亚楠徐怡3 上海交通大学SpeedStar 19.367 杨明王春香褚利文杜浩张宇腾光电组特等奖名次学校名称队伍名称比赛成绩指导教师学生1 武汉科技大学首安一队24.597 程磊祝愿博陈攀周顺平2 北京科技大学北京科技大学光电一队24.904 张文明杨珏刘雪伟张永康赵鑫鑫3 东北大学猎鹰队25.331 张云洲陈述平王学亮侯俊李远超一等奖共33支队伍摄像头组一等奖17支队伍名次学校名称队伍名称比赛成绩指导教师学生1 湖北汽车工业学院湖北汽车工业学院鹰眼1号19.903 石振东汤德强柯超闫琪吴汉2 上海大学S.U.L.挑战者队20.873 陈万米黄慎之蔡庆楠潘锦洲蔡兴旺3 华南理工大学疾风队21.038 陈安冯培聪张国泽何银强4 天津大学天大一队21.173 孟庆浩李铭泽刘锋宋晓喆5 上海交通大学CyberSmart 21.307 杨明王春香韩飞陈放戴春博6 吉林大学爱德三队21.435 李静曹子健陆辉田小彦7 吉林大学东北虎队21.787 刘富李静禹科林霄吴向畅8 天津大学天大二队21.92 孟庆浩杨卫星刘邈郭兴华9 西北工业大学翱翔队22.161 曲仕茹熊波马文佳张飞10 华南理工大学飞华队22.276 陈安林焕新苏文友陈易厅11 武汉科技大学首安二队22.642 章政曹赢范君涛公维军12 东南大学SEU东南大学四队22.913 周怡君谈英姿于鹏朱超鲍婧13 清华大学清华大学三角洲CCD队23.247 李立国贺凡波葛凯麟王新攀刘诚哲14 北京航空航天大学神舟一队23.562 陈博何勇灵唐振宇李仕柏于佳晨15 辽宁工程技术大学靖远一队23.769 张国军郭凤仪刘丹张强张凤龙16 武汉大学风之影25.183 陈正裘有斌严金辉张星17 重庆大学速29.86 盛朝强白颖杰彭琴袁景明光电组一等奖16支队伍名次学校名称队伍名称比赛成绩指导教师学生1 北京航空航天大学神箭一队25.657 陈博何勇灵陈妮亚范成家郑敏2 湖北汽车工业学院光电二号26.304 雷钧柴旺兴葛焕九张贤勇赵玉林3 南京邮电大学乐乐26.716 曹科才,江兵何勇勇卓盛龙陈哲4 电子科技大学成电掠影26.716 石玉,漆强赵裔陈国贞周立文5 山东大学F1 26.885 杨西侠田滨田崇翼孙庆轩6 桂林电子科技大学桂电3队27.7 张纪元,刘杰刘海波王目舜张诚7 长春理工大学光机1号28.689 孙俊喜,陈广秋韩红瑞王瑞陈钦湛8 上海电力学院电自二队29.11 杨宁,徐耀良尹洁查章其朱剑9 乐山师范学院凯越08 29.779 张自友,张九华杨维国胡遇春廖艺苑10 合肥工业大学HF_Drift 30.026 史久根,张阳孙勇张参参周仕娥11 乐山师范学院飞度08 30.207 张九华,张自友朱平郑素仙李兆明12 同济大学RaceKing 30.591 孙泽昌,罗峰刘矗殷辰佳孙东元13 南京邮电大学冲浪者32.242 高翔,杜鹏黄韶宇席义立周云城14 东北大学秦皇岛分校东秦4队33.346 赵一丁,汪晋宽蔡文舟栗韦叶徐静15 南京航空航天大学Snail 33.402 刘剑慰,孙永荣史经奎郑昕昕尹亮亮16 东北大学秦皇岛分校东秦3队34.556 马淑华,顾德英郑毅赵青贺姚芳二等奖共62支队伍摄像头组二等奖共30支队伍序号学校名称队伍名称指导教师学生1 南京师范大学电自1队陈敏沈世斌刘志明刘逸然郑启文2 山东大学霹雳2008 孙同景李振华黄晓雷梅高青肖保臣3 中南民族大学火箭陈勉程立戴伦学谭源庆钟小帆4 电子科技大学梦想号漆强张钜黄志安陈远祥陈全金5 北京科技大学天津学院头文字D 罗富臣许学东陈红生崔晋宇刘小龙6 成都信息工程学院快车王国江马尚昌甘威李小剑刘文7 浙江大学城市学院黑马一号江皓陈琢汪红良董晓周涛8 哈尔滨工程大学极品飞车1号管凤旭张爱筠孟恭王璐齐昭9 东北师范大学东师电子王连明张欢欢宋翠芳余安富10 浙江大学浙江大学1队EE-fly 姚维高锋俞斌翁华华文11 同济大学同舟队朱劲程莉周艳敏朱陈文赵阳12 中国人民解放军军事交通学院军交一队徐友春万剑王肖刘俊杰13 国防科技大学红旗I队安向京张辉谌彤童周力张文超14 东华大学DirectSpeed 曾培峰唐莉萍张乐欧阳文斌赵祖云15 大连理工大学天鹰吴振宇孙涛张元庆程敏王宝财16 河南理工大学闪电谢贝贝胡治国张晓东伏煦郭海金17 大连民族学院民院4队陈兴文李敏韦作凯高岩石廷亮18 中国民航大学航大三队罗云林丁芳刘宇夏阳王海库19 广东工业大学信之风申柏华徐杜陈候进雷石堂麦家錡20 天津科技大学绝对零度段英宏陈玲强李洲强丁根明21 烟台大学神州10号刘殿通杨世勇苗艳强董建军关东亮22 深圳大学追梦队邱建郭小勤杨华良程传顺王恩23 合肥工业大学OnTheWay 张阳史久根舒迎飞李楠楠赵立东24 杭州电子科技大学杭电疾风二队高明煜曾毓唐小进应宏健俞翔25 扬州大学赛格门张正华郭志波陈亮陈涛朱柏城26 华东理工大学超音速2队杜红彬俞敏王雯珊曹炜27 湖南大学湖南大学1队黎福海孙炜向永嘉李强陈嘉玲28 三江学院三江摄像头2队杨正理孙书芳邢小强汤佩和金寅锋29 长安大学长大4队韩毅李登峰赵轩陈李军秦绪鑫30 新疆大学新大二队程志江陈志军杨勇储钧李明光电组二等奖共32支队伍序号学校名称队伍名称指导教师学生1 中国地质大学地大1队叶敦范,吴涛庞建东邹国雄欧阳才校2 天津工业大学疾速漂移熊慧,徐国伟陈海彬罗强曾宝莹3 西北工业大学枭龙队曲仕茹曹阳万辉杨文骏4 东南大学SEU东南大学一队谈英姿,周怡君阚明建侯吉祥黄招彬5 中南民族大学零点六一八张俊敏胡国正柳杲华何宝灿6 北京科技大学天津学院急速奇侠李光耀,柯瑜贺翔左浩雷郭文慧7 西南交通大学西南交大一队蒋朝根吴仙华王维廖宗兵8 沈阳理工大学骑着蜗牛看世界王玲,伍彩云许天罡徐春利佟海川9 东北师范大学东师快车夏彬,王连明于安宁于鹏马英明10 杭州电子科技大学杭电极光一队曾毓,高明煜龚成龙张青刘伟11 浙江大学浙江大学2队(FreeWheel) 高锋,姚维徐碧文郑丹丹姚伟锋12 中国人民解放军军事交通学院军交三队彭永胜,章永进李华郭灿朱建坤13 武汉大学光之影郑贵林赵瑞祥庄洁玉卢开瑞14 广东技术师范学院绝影祁伟,肖蕾陈伟俊胡嘉文张显钐15 河海大学常州校区河海之翼张金波张文超程林邓晖16 清华大学三角洲光电队陆耿,郝杰成宇张晓伟陈宋17 北京理工大学北理傲雄车队张幽彤,冬雷刘鑫杨磊韩立博18 哈尔滨工程大学极品飞车2号张爱筠,管凤旭刘建旭谭吉来高晗19 上海电力学院计信一队袁三男,王绍徐唐明轩张会芳姬旭东20 河北大学工商学院飞凌车队白晓亮,李欢张伟杨磊刘乐21 中国民航大学航大一队丁芳,孙毅刚贾翔宇李科伟杨明22 广东工业大学Firefly 王日明,陈辉王利荣詹松彬曾滔23 北京理工大学Transfer 冬雷,张幽彤涂海峰万超贾振超24 青岛大学青大一队迟洁茹张彦欣刘宏领安卡25 东华大学东华大学一队郑建立,孙培德董宗祥何晴孙佳新26 重庆大学重大星火王永东辛淼余征华王玉瑾27 天津工业大学天津工业大学三队熊慧,毕云晴陈东旭冉荣杨雪28 长安大学长大一队汪贵平,韩毅鲁盼欧意文王换换29 上海大学疯狂老鼠队陈万米,黄慎之邹恒超袁文王昆30 上海第二工业大学光电B队杨冠群黄俊奇卑力钧毕成林31 河海大学河海光电李东新,刘久付郭光陈东严史团委32 大连理工大学Hyper-Eye 吴振宇,潘学军赵亮李胜铭余洋优秀奖共2支队伍组别学校名称队伍名称指导教师学生LED 西安交通大学西安交通大学一队昝鑫,刘小勇石坤蒲昊陈逸奇CCD 河北工程大学先驱音速董克俭贺洪江王强王伟黄有焱特邀竞速表演奖学校名称队伍名称指导教师学生上海大学Racer X队陈万米李嵩奚嘉敏钱荔中南大学黑影狂飙3代王击肖晓明谢良之何信华冯义北京科技大学北京科技大学特邀队陈树新孟宇孔守斌罗新强王茜茜特邀创意表演奖学校名称队伍名称指导教师学生东北大学东北大学特邀队李晶皎王爱侠王光勇王亮李庆宇上海交通大学上海交通大学特邀队杨明张善伟彭新荣徐磊。

STEM超级跑鞋技术流程设计报告英文回答:STEM Supercar Running Shoe: A Technological Process Design Report。
I am excited to present my STEM Supercar Running Shoe: A Technological Process Design Report. This report will provide insights into the technological advancements and processes involved in designing and manufacturing this innovative footwear.Design Concept。
The STEM Supercar Running Shoe is a revolutionary design concept that aims to enhance running performance and overall comfort. The shoe's design is inspired by the aerodynamic curves and sleek engineering of supercars. The goal is to create a shoe that not only looks stunning but also provides an unparalleled running experience.Material Selection。
The choice of materials is critical in ensuring the shoe's durability, functionality, and aesthetic appeal. The upper is crafted from a lightweight and breathable mesh fabric that provides exceptional breathability and flexibility. The midsole is constructed from a high-performance foam material that offers superior cushioning and energy return. The outsole is made of a durable rubber compound that provides excellent traction and grip on various surfaces.Manufacturing Process。

race实验原理摘要:一、实验背景1.实验目的2.实验意义二、实验原理1.实验基本流程2.实验核心方法3.实验关键参数三、实验应用1.实验领域2.实验实例3.实验成果四、实验展望1.实验局限性2.实验改进方向3.实验未来前景正文:一、实验背景随着科技的快速发展,人工智能、大数据等领域的研究日益深入。
在这些领域中,有一种名为“race”的实验,它旨在通过模拟人类认知过程,探究人类思维的奥秘。
本文将为您详细介绍race 实验的原理。
二、实验原理1.实验基本流程race 实验是一种基于认知神经科学、计算机科学等多个学科的实验方法。
实验过程中,参与者需要完成一系列与认知能力相关的任务,如记忆、决策等。
通过记录参与者在实验中的脑电波、眼动等生理信号,研究者可以分析人类认知过程的神经机制。
2.实验核心方法实验核心方法为脑电波信号的分析。
脑电波信号可以反映大脑神经活动的实时状态,通过分析这些信号,研究者可以了解参与者在进行不同认知任务时的神经活动特点。
此外,眼动信号的分析也是实验的重要部分,它可以反映参与者的注意力和视觉搜索策略。
3.实验关键参数实验关键参数包括实验任务的设计、实验环境的设置以及实验数据的分析方法。
任务设计需要充分考虑人类认知过程的特点,以保证实验的有效性;实验环境的设置要尽量模拟现实场景,以减少外部因素对实验结果的影响;数据分析方法需要结合实验目的,选择合适的统计和建模技术。
三、实验应用1.实验领域race 实验广泛应用于心理学、神经科学、人工智能等领域,为研究人类认知过程提供了有力的工具。
2.实验实例以心理学为例,研究者可以通过race 实验探究人类记忆、决策等认知过程的神经机制。
在神经科学领域,实验可以帮助研究者了解大脑不同区域的功能和相互联系。
在人工智能领域,实验可以为机器学习、自然语言处理等领域的研究提供启示。
3.实验成果通过race 实验,研究者们取得了一系列重要成果,如揭示了人类认知过程的神经机制、提出了新的学习算法等。

haiyamaill.Of.System目录0.1 文档目的.......................................................................................................................0.2 文档范围.......................................................................................................................0.3 读者对象与职责............................................................................................................0.4 参考文档.......................................................................................................................0.5 术语与缩写解释............................................................................................................错误!未定义书签。
33333提前发现并解决开辟过程中将会遇到的技术障碍描述海雅缤纷 mall 开辟设计前的技术难点与需求难点。
项目经理或者技术负责人识别项目中的技术难题,指定技术预研人员攻克该问题电信短信网关相关文献《广东电信短信接入API 使用手册(C#接口).pdf 》《广东电信短信接入API 使用手册(JAVA 接口).pdf 》今匡助开辟人员更好地进行需求开辟、系统设计和程序设计。

蹦铁研究报告1. 引言蹦铁是一种新兴的运动方式,其起源于极限运动和健身领域。
本研究报告旨在探讨蹦铁的定义、历史、技术和健康益处,以及对未来的展望。
2. 定义蹦铁是一种结合了轮滑、极限运动和健身元素的活动,参与者使用特制的弹簧鞋完成各种动作,如弹跳、旋转和滑行。
蹦铁运动通过利用弹簧鞋的反弹力量,使参与者能够在地面上进行极限动作和技巧。
3. 历史蹦铁最早起源于20世纪80年代的美国,最初作为一种极限运动而存在。
随着技术的不断改进和推广,蹦铁逐渐发展为一种受欢迎的健身运动,并在全球范围内拥有了一大批热情的参与者。
4. 技术4.1 弹跳技巧蹦铁的核心技术是弹跳,参与者利用弹簧鞋的反弹力量进行高度跳跃。
在弹跳过程中,参与者需要掌握身体的平衡和控制,以避免摔倒或受伤。
4.2 旋转技巧除了弹跳,蹦铁还包括各种旋转技巧,如360度旋转、后空翻等。
这些技术要求参与者具备良好的身体协调能力和空间感。
4.3 滑行技巧蹦铁不仅可以进行弹跳和旋转,还可以通过利用弹簧鞋的滑行特性,在地面上进行滑行。
这种技术要求参与者熟练掌握滑行姿势和转向技巧。
5. 健康益处蹦铁作为一种全身性的运动方式,对身体健康有着很多益处。
首先,蹦铁可以增强肌肉力量和耐力。
在参与蹦铁运动时,各种动作和技巧需要身体各个部位的肌肉协同工作,从而使肌肉得到锻炼和增强。
其次,蹦铁有助于提高平衡和协调能力。
在弹跳、旋转和滑行过程中,参与者需要保持身体的平衡,同时控制各种动作和技巧,这对平衡和协调能力的提升非常有益。
此外,蹦铁还可以帮助改善心肺功能。
由于蹦铁是一项高强度的运动,参与者在进行各种动作和技巧时,需要消耗大量的能量,从而促进心血管系统的运作,提高心肺功能。
6. 展望蹦铁作为一种新兴的运动方式,目前还处于发展初期。
随着科技的进步和技术的不断提升,蹦铁可能还会有更多的发展空间和创新。
未来,蹦铁的技术和装备可能会更加先进和安全,从而吸引更多的人参与。
同时,蹦铁作为一种健身运动,可能会引起更多健身爱好者的兴趣,并在健身行业中得到更多的认可和推广。

百度文库-东北师范大学
2009年第四届全国大学生“飞思卡尔”杯智能汽车竞赛
获奖名单
一、组织贡献奖
全国总决赛承办学校北京科技大学
东北赛区承办学校吉林大学
华北赛区承办学校北京科技大学
华东赛区承办学校杭州电子科技大学
华南赛区承办学校华南理工大学
西部赛区承办学校西北工业大学
二、优秀论文奖(共26篇)
北京科技大学北京科技大学CCD2队北京科技大学天津学院雷霆二队
北京科技大学中冶一队
清华大学三角洲队光电队
天津工业大学天津工业大学一队
长安大学长大二队
电子科技大学成电飞扬
西安交通大学绝尘队
西北工业大学翱翔队
西北师范大学瞬之队
华中科技大学华中科技大学一队
武汉科技大学首安四队
中南民族大学AE86队
湖北汽车工业学院惠捷二号
华南理工大学疾速队
东北大学龙腾队
东北大学猎豹
东北师范大学东师电子一队
吉林大学爱德队
东北大学秦皇岛分校东秦3队
杭州电子科技大学钱江1号
上海交通大学SmartStar
同济大学Raceking
南京师范大学先驱者
安徽大学风行者
杭电科技大信息工程学院超越者队
六、优秀奖(共15支队伍)
七、创意组。

STEM超级跑鞋技术流程设计报告自查报告。
为了确保STEM超级跑鞋技术的流程设计符合公司的标准和要求,我们进行了自查。
以下是我们的自查报告:
1. 设计流程的完整性,我们审查了设计流程的完整性,包括从
概念设计到原型制作再到最终产品的生产流程。
我们确认每个步骤
都有明确的目标和可衡量的指标,以确保流程的连贯性和高效性。
2. 技术可行性,我们评估了设计流程中所采用的技术的可行性,包括材料选择、制造工艺和产品测试。
我们确认所采用的技术能够
满足产品的性能要求,并且具有可持续性和可靠性。
3. 资源管理,我们审查了设计流程中所需的资源,包括人力、
物力和财力。
我们确认我们有足够的资源来支持设计流程,并且能
够及时调整资源分配以应对可能出现的问题。
4. 质量控制,我们检查了设计流程中的质量控制措施,包括设
计评审、原材料检验和产品测试。
我们确认每个环节都有严格的质
量控制标准,并且能够及时发现和解决质量问题。
5. 风险管理,我们评估了设计流程中可能出现的风险,并制定了相应的风险管理计划。
我们确认我们能够在设计流程中及时应对各种风险,以确保产品的顺利推进。
综上所述,我们的自查结果显示,STEM超级跑鞋技术的流程设计符合公司的标准和要求,并且能够支持产品的高质量生产。
我们将继续监控和改进设计流程,以确保产品的持续成功。

联合测试成就赛道王者
佚名
【期刊名称】《汽车制造业》
【年(卷),期】2016(000)016
【摘要】为了纪念福特GT40赛车在勒芒24h耐力赛首次夺冠50周年,福特集团在2015年宣布启动新一代福特GT计划。
2016年,经过赛事级强化的新一代福特GT跑车踏上了世界耐力锦标赛的征程WEC,并于2016年6月19日再次称雄勒芒24h耐力赛(LMGTEPro组别)。
成功的背后,这款传奇赛车的开发和测试过程是通过一种三方合作的方式完成的。
【总页数】1页(P30-30)
【正文语种】中文
【中图分类】U469.1
【相关文献】
1.赛道王者—2010款雪佛兰克尔维特Grand Sport [J], 无
2.华晨中华V7高海拔征战量产车性能大赛王者出击续写赛道传奇 [J],
3.10年50台徐工金,成就"矿山王者" [J], 吴尤
4.王者归位五羊-本田车队称霸上海天马山赛道 [J], 陈飞
5.成就赛道梦想隆鑫无极300RR [J], 景章
因版权原因,仅展示原文概要,查看原文内容请购买。


遥控小赛车设计报告单引言遥控小赛车是一项基于遥控技术的娱乐项目,通过遥控器可以远程操控小赛车在各种地形上自由行驶。
本报告将对设计过程进行详细说明,包括设计目标、设计原理、硬件设计、软件设计等方面的内容。
设计目标本设计的目标是制作一款具备较高灵活性和可靠性的遥控小赛车。
具体目标如下:1. 灵活性:小赛车可以在各种地形上自如行驶,包括平地、坡地、不平整地形等。
2. 可靠性:小赛车具备较好的抗摔能力,可以应对意外情况,如撞击、碰撞等。
3. 操控性:遥控器操控小赛车需要简单方便,操控信号响应快速准确,提供良好的操控体验。
设计原理遥控小赛车的设计原理分为两个主要部分:遥控器与小赛车的通信模块,以及小赛车的运动控制模块。
1. 通信模块:遥控器与小赛车之间通过射频通信进行信息传输,包括操控指令、状态信息等。
2. 运动控制模块:小赛车内部通过电机控制模块、传感器模块等实现运动控制,包括前进、后退、转向等。
硬件设计遥控器遥控器硬件包括以下几个主要组成部分:1. 微控制器:通过微控制器实现遥控指令的解码和编码,同时负责与小赛车的通信连接。
2. 控制按键:遥控器上设置前进、后退、转向等按键,通过按键操作发送相应操控指令。
3. 射频模块:将遥控指令通过射频信号发送给小赛车的接收模块。
小赛车小赛车硬件包括以下几个主要组成部分:1. 接收模块:接收从遥控器发送的射频信号,并解码得到操控指令。
2. 电机控制模块:控制小赛车电机的转速和方向,实现小赛车的前进、后退、转向等功能。
3. 传感器模块:通过传感器模块获取小赛车的运动状态,如速度、位置等。
软件设计遥控器遥控器的软件设计主要包括以下几个方面:1. 按键扫描:通过循环扫描按键状态,实时检测按键的输入情况。
2. 指令编码:根据按键状态生成相应的指令码,通过射频模块发送给小赛车。
3. 通信连接:建立与小赛车的通信连接,实现数据的双向传输。
小赛车小赛车的软件设计主要包括以下几个方面:1. 射频信号接收:通过接收模块接收遥控器发送的射频信号,并进行解码得到指令码。

STEM超级跑鞋技术流程设计报告自查报告。
在设计STEM超级跑鞋技术的流程中,我们进行了全面的自查,以确保产品的质量和性能达到最佳水平。
以下是我们进行的自查内容和结果汇报。
1. 技术研发。
我们的技术团队进行了多轮的研发工作,确保了超级跑鞋的设计和材料选择符合最新的科学技术标准。
我们对鞋底材料、缓震系统、鞋面透气性等方面进行了详细的测试和验证,确保产品的技术指标达到预期要求。
2. 生产工艺。
我们与生产工厂进行了密切的合作,确保生产工艺符合设计要求。
我们对生产线进行了多次现场检查,并对关键工艺节点进行了重点监控,以确保产品的生产质量。
3. 质量控制。
我们建立了严格的质量控制流程,包括原材料检验、生产过程
监控和成品检测。
我们对每一双超级跑鞋都进行了全面的检测,确
保产品的质量稳定和可靠。
4. 用户体验。
我们邀请了一批专业运动员和普通消费者进行了产品体验测试,收集了他们的反馈意见,并对产品进行了改进优化。
我们致力于提
供最佳的用户体验,确保超级跑鞋在实际运动中能够发挥最佳性能。
5. 安全标准。
我们遵循了国际安全标准,对产品的安全性进行了全面评估。
我们确保产品的使用过程中不会对用户造成任何安全隐患,并对产
品进行了相关认证和检测。
通过以上自查工作,我们对STEM超级跑鞋技术的流程设计进行
了全面的确认和验证,确保产品的质量和性能达到了最高标准。
我
们将继续致力于技术创新和产品优化,为用户提供更好的运动体验。

小学科技模型大赛飙车王竞速赛规则一、竞赛项目:飙车王竞速赛,学生自行安装调试参加区原装车竞速赛。
原装车竞速赛:采用北碚区青少年科技模型大赛竞赛器材飙车王套材,不得随意升级改装。
二、制作要求1、运动员自备竞赛套材1-2套模型,赛前安装调试完成,所用材料不得借用、共用,违者不能进场参赛。
2、参赛运动员按编号参加比赛,不得高声喧哗。
否则作弃权处理。
二、竞赛器材要求1、车轮必须装有轮胎,不允许仅靠轮毂直接接触跑道。
2、限用两节 5号电池,电池任选自备。
3、每一部赛车只能供一名参赛者使用,但允许参赛者准备一辆备用车,所有参赛车辆必须于赛前进行审验登记,否则不能用于比赛。
三、跑道及有关规定:比赛必须在专用跑道上进行,跑道形式和规格由组委会赛前统一规定。
四、车况审核:所有参赛者的赛车须在裁判员处进行审核编号,只有检查合格的赛车才能参加比赛。
裁判员在比赛中还将进行抽审,凡发现有不合格,将取消该运动员的该轮比赛成绩。
五、竞速赛规定:1、每轮比赛均须点名,点名后一分钟不到者,以弃权论。
2、比赛进行两轮,以两轮成绩之和为个人最终比赛成绩,团体成绩以参赛的两名队员、两轮成绩之和为最终比赛成绩。
3、每轮比赛开始时有1分钟的准备时间,比赛开始时裁判员发出“预备”口令,选手应立即打开电源开关,单手持车在出发预备区(出发线以外)的上方等待(车轮空转),当裁判员发出“放”的起跑口令后,选手垂直向下释放赛车,不得向前助力推动。
发生抢跑、助推和压线等犯规行为,将酌情给予增加1秒以上的处罚。
起跑口令发出后3秒,仍未放出赛车者判为0分。
4、赛车出发后选手不得以任何方式触及赛车,比赛中如发生停车、飞车、翻车、倒行和窜道等情况,即使车辆仍在正常行驶,该轮成绩亦为0分。
出现上述情况,选手应立即收回自己的赛车退出本轮比赛。
5、比赛中车体主要部分(包括车壳、车轮、轮胎、导轮等)发生散落、解体,该轮成绩为0分。
6、采用人工同时计时,以赛车通过起始线开始计时,至赛车跑完规定的线路到达终点时停止计时。


最新赛车技术的突破赛车作为一项受欢迎的运动和娱乐活动,在全球范围内拥有广泛的追随者。
无论是F1赛车、拉力赛还是卡丁车比赛,都需要先进的技术和创新来推动运动发展。
在最近几年中,赛车技术取得了一系列突破,这些突破不仅提升了赛车的速度和性能,同时也改善了运动员的安全性。
本文将介绍几个最新赛车技术的突破。
1. 空气动力学设计在赛车领域,空气动力学一直是一个重要的研究方向。
通过改进赛车的空气动力学设计,可以减少空气阻力,提高速度和操控性能。
最新的突破之一是通过使用CFD(计算流体力学)软件来模拟赛车在不同速度下的空气动力学行为,从而优化车身设计。
这些软件可以帮助工程师在设计阶段进行快速迭代和优化,以获得最佳的空气动力学性能。
2. 高性能材料的运用另一个最新的赛车技术突破是在赛车中使用高性能材料。
传统的赛车材料如铝合金和钢铁可能会限制赛车的重量和性能。
然而,通过使用碳纤维复合材料等高性能材料,可以在保持强度的同时减轻赛车的重量。
这些材料具有出色的抗拉强度和刚性,可以提高赛车的加速度和操控性。
3. 智能驾驶辅助系统随着人工智能技术的发展,智能驾驶辅助系统在赛车中得到了广泛应用。
这些系统使用传感器和算法来监测赛车的状态,并提供实时的反馈和建议给驾驶员。
例如,智能刹车控制系统可以通过监测赛车的速度和刹车力度,自动调整刹车压力,以避免滑动和翻车。
智能驾驶辅助系统不仅提高了赛车的安全性,还可以帮助驾驶员更好地掌握赛道和操控赛车。
4. 能源回收技术在减少环境影响方面,能源回收技术是一个重要的突破。
通过将制动能量转化为可再生能源,赛车可以在不降低性能的情况下减少燃料消耗和排放量。
这种技术被广泛应用于混合动力和电动赛车中。
能源回收技术不仅使赛车更环保,还提供了额外的动力供应,从而提高了赛车的性能。
5. 虚拟现实模拟虚拟现实技术已经成为赛车训练和模拟的重要工具。
通过使用虚拟现实设备,驾驶员可以在真实的赛车场景中进行练习和模拟。

w e e n g i n e e r y o u r p r o g r e s sTable of Contents1 Product Details .....................................................................................................................................................................................2 1.1 Application ............................................................................................................................................................................................. 2 1.2 Recommended Installation .................................................................................................................................................................... 2 2 Function ................................................................................................................................................................................................ 2 2.1 Features ................................................................................................................................................................................................. 23 Technical Data ...................................................................................................................................................................................... 34 Ordering Information ........................................................................................................................................................................... 3 4.1 Type Code ............................................................................................................................................................................................. 3 4.2Versions currently available (3)5 Description of Characterisics in Accordance with Type Code ........................................................................................................ 4 5.1 Characteristic 1: Variant DSU ................................................................................................................................................................ 4 5.2 Characteristic 2: Port / Case: Variant CA - Cartridge ............................................................................................................................. 4 5.3 Characteristic 3: input flow rate .............................................................................................................................................................. 4 5.4 Characteristic 4: Max.permissible pressure ........................................................................................................................................... 4 5.5 Characteristic 5: Activation / Setting ...................................................................................................................................................... 4 5.6 Characteristic 6: Stepped cavity 8.00239 (corresponds to Bucher UVP- 4) ......................................................................................... 4 Das vorgesteuerte Druckbegrenzungsventil ist ein Cartridgebauteil und wird in eine Stufenbohrung entsprechend nebenstehender Zeichnung eingeschraubt. ..................................................................................................................................................................................................... 4 5.7 Characteristic 7: Seal ............................................................................................................................................................................. 4 6 Installation ............................................................................................................................................................................................ 5 6.1 General information ............................................................................................................................................................................... 5 6.2 Connection Recommendations .............................................................................................................................................................. 5 6.3 Installation - installation space ............................................................................................................................................................... 5 7 Notes, Standards and Safety Instructions ......................................................................................................................................... 5 7.1 General Instructions ............................................................................................................................................................................... 5 7.2 Standards ............................................................................................................................................................................................... 58 Zubehör .................................................................................................................................................................................................5w e e n g i n e e r y o u r p r o g r e s s1The pressure valve is designed as cartridge valve. It is a direct operated valve for flow rates up to 10 l / min, which can be adjusted manually. The adjustment can be protected by a cap. The components are designed robust. The valve can be charged up to 500 bar and is delivered at a certain pressure.1.1 ApplicationThe pressure valve is used to protect high volume lift cylinders in truck cranes. It should avoid excessive pressure increase in unmoving cylin-ders due to warming (“sushine valve”).1.2 Recommended Installation2 FunctionThe pressure valve operates as a direct acting seat valve. The pressure can be set using an adjusting screw. The screw is locked after adjustment with a backup sealing nut and can be protected by a cap.2.1 Features▪ Cartridge type▪ Small installation space ▪ Robust construction▪Stepped cavity (corresponds to Bucher UVP-4) ▪Seat valve, leakage freeP – protected port T - tankw e e n g i n e e r y o u r p r o g r e s s3 Technical Data4 4.1 Type CodeXXX – fest vorgegebene Merkmale XXX – vom Kunden wählbare Merkmale4.2 Versions currently availableThe versions listed below are available as standard. Further versions as part of the options given on the type code can be configured upon request.designationtype codepart nr.PRV –DSU –CA -10LPM -500BAR –MAN230BAR –239 -NBR PRV –DSU –CA -10 -500 –MAN230 –239 -N 412.072.451.9 PRV –DSU –CA -10LPM -500BAR –MAN235BAR –239 -NBR PRV –DSU –CA -10 -500 –MAN235 –239 -N 412.072.430.9 PRV –DSU –CA -10LPM -500BAR –MAN290BAR –239 -NBR PRV –DSU –CA -10 -500 –MAN290 –239 -N 412.072.433.9 PRV –DSU –CA -10LPM -500BAR –MAN340BAR –239 -NBR PRV –DSU –CA -10 -500 –MAN340 –239 -N 412.072.431.9 PRV –DSU –CA -10LPM -500BAR –MAN420BAR –239 -NBR PRV –DSU –CA -10 -500 –MAN420 –239 -N 412.072.432.9CriteriaUnit Value Installation position any Weightkg 0,1Surface protectiveZinc coated Maximum input pressure (P) bar 550Adjustable pressurebar 100 - 500 Maximum Tankpressure (T) bar 8 Maximum input flow rate (P) l/min 10Hydraulic fluidMineral oil (HL, HLP) conforming with DIN 51524, other fluids upon re-Hydraulic fluid pressure range °C -25 bis +80 Ambient temperature °C < +50 Viscosity rangemm2/s 2,8 - 500Contamination gradeFiltering conforming with NAS 1638, class 9, with minimum retentionPRVDSUCA10500239N000102030405060700 Product group Pressure relief valves PRV 01 Variant manual adjustable DSU 02 Port / Case Cartridgeventil CA 03 Input flow rate Qmax.10 l/min 1004 Max.permissible pressure Pmax.. 500bar50005 Activation Man ually adjustable 100-500barMAN100 06 Stepped cavity WESSEL-Patrone 8.00239 (stepped cavity) 239 07 Seal NBR, temperatur range -25°C bis +80°CNw e e n g i n e e r y o u r p r o g r e s s5 5.1 Characteristic 1: Variant DSUAdjustable pressure relief valve5.2 Characteristic 2: Port / Case: Variant CA - CartridgeAs variant CA, the valve is delivered as a cartridge valve. The Cavity has to be designed according to characteristic 6 (stepped cavity)5.3 Characteristic 3: input flow rateRecommended maximum flow rate of 10 l/min.5.4 Characteristic 4: Max.permissible pressureMaximum permissible pressure is 500bar (adjustable range100 - 500bar)5.5 Characteristic 5: Activation / SettingThe valve can be adjusted with a set screw. For this purpose, the protective cap must be removed and the counter nut undone.5.6 Characteristic 6: Stepped cavity 8.00239 (corresponds to Bucher UVP- 4)Das vorgesteuerte Druckbegrenzungsventil ist ein Cartridgebauteilund wird in eine Stufenbohrung entsprechend nebenstehender Zeichnung eingeschraubt.5.7 Characteristic 7: SealNBR, temperature range -25°C bis +80°Cw e e n g i n e e r y o u r p r o g r e s s6 Installation6.1 General information▪ Observe all installation and safety information of the construction machine / attachment tools manufacturer. ▪ Only technically permitted changes are to be made on the construction machine. ▪ The user has to ensure that the device is suitable for the respective application. ▪ Application exclusively for the range of application specified by the manufacturer. ▪ Before installation or de-installation, the hydraulic system is to be depressurized. ▪ Settings are to be made by qualified personnel only.▪ Opening is only to be performed with the approval of the manufacturer, otherwise the warranty is invalidated.6.2 Connection RecommendationsNOTE : Enclosed proposed resolution is not always guaranteed. The functionality and the technical details of the construction ma-chine must be checked.5.3 Montage – BauraumObserve connection names.Do not damage seals and flange surface. Its hydraulic system must be ventedEnsure sufficient free space for setting and installation work6.3 Installation - installation space▪ Observe connection names.▪ Do not damage seals and flange surface. ▪ Its hydraulic system must be vented▪ Ensure sufficient free space for setting and installation workCAUTION: Hydraulic hoses must not touch the pressure relief valve, otherwise they are subject to thermal damaging. Tightening torques must be observed. Torque wrench needed.77.1 General Instructions▪The views in drawings are shown in accordance with the European normal projection variant▪ A comma ( , ) is used as a decimal point in drawings ▪All dimensions are given in mm7.2 StandardsThe following standards must be observed when installing and operating the valve:▪ DIN EN ISO 13732-1:2008-12, Temperatures on accessible surfaces8 ZubehörSafety cap: 275.066.000.6。
第三届全国大学生“飞思卡尔”杯智能汽车竞赛技术报告学校:同济大学队伍名称:RaceKing参赛队员:刘矗殷辰佳孙东元带队教师:罗峰关于技术报告和研究论文使用授权的说明本人完全了解第三届全国大学生“飞思卡尔”杯智能汽车竞赛关保留、使用技术报告和研究论文的规定,即:参赛作品著作权归参赛者本人,比赛组委会和飞思卡尔半导体公司可以在相关主页上收录并公开参赛作品的设计方案、技术报告以及参赛模型车的视频、图像资料,并将相关内容编纂收录在组委会出版论文集中。
参赛队员签名:带队教师签名:日期:目录第一章引言 (1)第二章电方案概述 (2)2.1光电道路识别方案分析 (2)2.1.1 韩国透镜方案 (2)2.1.2 连续式传感器方案 (4)2.1.3 脉冲大电流前瞻方案 (5)2.2 道路识别方案概述 (6)第三章机械改装 (8)3.1车模重心的调整: (8)3.2齿轮啮合间隙的调整 (8)3.3 舵机安装方式的调整 (9)3.4 差速机构的调整 (9)3.5 主悬架的调整 (9)3.6 主销倾角的调整: (10)3.6.1 主销后倾角 (10)3.6.2主销内倾角 (10)3.6.3车轮外倾角 (10)3.6.4 车轮前束 (11)3.6.5 后轮的外倾角 (11)第四章电路设计 (12)4.1 核心控制器模块 (13)4.1.1 MC9S08QE128功能概述 (13)4.1.2 双芯片功能分配 (15)4.1.3 最小系统电路设计 (16)4.2 电能分配模块 (17)4.2.1 各模块用电情况分析 (18)4.2.2 LM2596-5.0开关稳压电路 (19)4.2.3 LM1117三端稳压电路 (20)4.2.4 MC34063DC-DC升压电路 (20)第五章控制算法 (23)5.1 传感器主动跟随算法 (23)5.2 转向算法 (25)5.3 电机速度控制算法 (27)第六章调试工具 (32)6.1 监控调试平台 (33)6.2 无线监控接口 (34)6.3 三维仿真调试模块的实现 (36)第七章结论 (40)第一章引言本论文按照第三届“飞思卡尔”全国大学生智能汽车大赛光电组比赛要求,在充分分析了上两届比赛论文和大赛情况并详细分析光电组传统方案后,本队进行创新设计并成功解决困扰已久的传感器探测距离和探测精度的问题,使本队赛车达到前瞻距离50cm(传感器路面探测点距赛车转向轮的距离)和精度0.5cm(路面黑线横向探测间距)的探测性能,同时还有着极高的稳定性和抗干扰能力。
而且,本队不仅在传感器方面较之其他传统光电车队有了质的飞跃,在控制器方面也有很大的改进。
采用飞思卡尔公司2007年的最佳8位处理器MC9S08QE128作为核心控制器。
此芯片不仅功能丰富,性能强大,而且规则规定可以使用两片8位芯片,可以同时进行信号处理和电机控制,在算法设计上也有了更大的空间和更灵活的方案。
在整个比赛的准备过程中,本队还开发了相应的上位机调试平台,可以通过无线收发器接收赛车实时信息,在电脑上位机中直观地了解赛车目前行驶情况和存在的问题。
另外此软件还可以进行赛车控制算法仿真,通过电脑模拟算法运行结果对算法可能产生的效果进行定性评价,大大提高的算法开发的效率。
在接下来的技术报告中,主要从机械,电路,算法和调试四方面对本队的技术方案作较为具体的介绍。
首先在第二章的方案概述中先分析了光电车的特性和主要问题,然后介绍应对的方案并给出本队的解决方案同时再赛车系统整体做定性介绍,然后在第三章机械改装,第四章电路设计和第五章控制算法中对本方案的各个细节进行介绍。
接着在第六章调试工具中详细就介绍了本队自主开发的上位机平台。
第二章电方案概述由于本次比赛中对于执行机构不能有任何改动,所以方案设计主要集中在道路识别方案和控制系统上。
在道路识别方面,本队使用随动舵机控制前瞻光电开关对赛道黑线主动跟随,转向舵机通过随动比控制进行转向,使得前瞻距离可以加长而不用担心盲区问题,在任意情况都可以较好的循线。
在控制芯片方面使用了两片MC9S08QE128CLK,将信号分析和电机控制分开运行,进一步减小控制时间提高控制精度。
由于对于智能车系统来说,最主要的是道路识别系统,其识别能力的优劣将直接影响赛车的行驶性能,所以接下来主要分析道路识别方案,而其他部分将分散在其他章节逐个介绍。
2.1光电道路识别方案分析2.1.1 韩国透镜方案在本届大赛规则中对于光电组别的划分是这样规定的:“在车模中使用透镜成像进行道路检测方法属于摄像头赛题组,除此之外则属于光电赛题组。
”,可见实际上大赛对于光电组组使用什么方式进行道路识别是非常宽松的,透镜一样也可以使用,只要不是用来成像就可以。
正如韩国2007年的二等奖车队KEM4328便是使用透镜来增加探测距离提前探测弯道,在透镜内部只有两个接收管,对于道路信息的提取是以点的方式进行,而不是图像,所以并不违反比赛规则,这点也已经向大赛组委会确认过了。
如下图所示便是韩国透镜车:第三届全国大学生智能汽车邀请赛技术报告图2.1但是透镜方案制作复杂而且体积庞大,往也无法前伸过多,以免造成整车质量前移而产生车体前倾不利于整车稳定性,同时车重增加导致惯性过大也会极大影响赛车的加减速性能,所以在韩国的透镜方案中也有车队为了将车身重量匹配好而把电池后移并且作了整车轻量化改造的情况,比如下图的2006年的冠军Nalssen车队便是如此:图2.2第二章光电方案概述不过此类方案虽然在一定程度上提高了探测距离,但在探测精度方面并没有很大改善,仍取决于传感器的布置方式,当然也可以通过一些手段提高探测精度,比如接下来要提到的清华大学的连续式传感器使得纵向探测精度达到了1mm的水平。
总之,由于韩国智能车大赛的赛道很长只能跑一圈而且提前公布赛道形状,和中国赛事情况不同,所以对于他们车队来说,稳定性是最重要的,速度反倒是其次,所以其对探测距离的要求不如我们这么大。
2.1.2 连续式传感器方案这是在飞思卡尔技术社区中清华大学三角洲工作室spanner上传的技术报告中提到的方案,使用模拟器件然后通过实验拟合出每个传感器的电压-距离曲线来提高纵向探测精度,如下图为其传感器特性和拟合曲线图:图2.3第三届全国大学生智能汽车邀请赛技术报告可见,理论曲线和拟合曲线还是非常接近的,而且各个传感器的一致性也相当好。
这一方面取决于在传感器选择上使用了较为合适的产品,另一方面也是其归一化处理和拟合方法比较得当所致。
通过这种软件方法就可以有效地提高传感器的一致性,并且大大提高了纵向探测精度。
不过前提是要有较好的归一化处理算法和曲线拟合测试保证,对于算法的编写和实验能力有一定的要求。
2.1.3 脉冲大电流前瞻方案同样也是出自清华大学得方案,主要思想就是通过加大发光管上的电流来提高传感器探测距离,但是传感器长时间通大电流会造成器件损坏,所以就使用脉冲发射的方式进行,如此一来便可以有效地增加探测距离。
不过这样做会造成一定的干扰性,虽然通过滤波或者其他技术可以解决,但对于模拟电路调试方面就有比较高的要求了。
下图是其前瞻传感器图片:图2.4 图2.5如此一来,理论上就解决了光电传感器前瞻距离的问题,可以说只要电路参数调得好,达到40cm甚至50cm的前瞻距离都是有可能的。
不过,在spanner上传的另一篇文章(《基于Plastid1仿真平台的智能车硬件有话设计》)中也指出理论上存在一个最佳的前瞻距离,文章认为在光电传感器一字排列时,最佳前瞻距离与车速第二章电方案概述有关,3m/s时选30cm左右为佳,同时也认为如果“不考虑机械设计和光电设计的难度的情况下,应当使前瞻距离随实际车速而变化”。
总之,在前瞻距离问题能够解决的情况下,并不是越远越好,至少对已一字排列传感器而言存在一个最佳前瞻距离的问题。
2.2 道路识别方案概述在之前的方案分析中可以发现,对于光电组来说,传感器的探测距离和探测精度非常重要,也是上届比赛中所有光电车队面前的最大障碍。
这两个问题虽然目前都有一些解决方案,无论是距离或者精度都可以大幅度提高,但是毕竟受限于信息量,使得道路识别的综合效果无法得到有效的提高。
由于光电传感器有数量上的限制,对于赛道的探测势必受限于信息量,无论精度多高,也只能是布置了传感器的这一块区域内的精度较高,在赛道上没有布置传感器的地方就是盲区。
所以探测距离越远,盲区也就越大。
精度无论多高,看不见赛道就无法正确控制,势必速度就无法提高,这也是为何一字型布局会有最佳前瞻距离的原因。
同样的,任何单排的固定布局方式都一定会存在这个最佳前瞻距离,也就是前瞻极限。
所以,接下来要做的就是如何增加这个前瞻极限使得赛车可以获得更大的前瞻距离同时又不会有过多的盲区产生。
于是,便得出了本队的大前瞻随动控制方案。
如下图所示:第三届全国大学生智能汽车邀请赛技术报告图2.6这个方案是将大前瞻传感器安装在伺服电机(随动舵机)上,前置并悬伸出车体前端,将前瞻距离用到前排传感器(随动光电组)所能达到的最大距离,大约50cm 左右。
然后控制随动舵机使其跟踪黑线并始终将黑线置于随动光电组的中间位置,犹如导弹跟踪一般。
接着在控制算法中通过随动比调节转向舵机的转角,使其配合随动舵机进行转向,如此便能达到赛车系统的超前调节和路径优化等目的。
具体的控制算法见后文第五章控制算法部分。
第三章机械改装对于模型赛车而言,底盘质量对赛车性能有举足轻重的影响。
但是本次比赛中赛车的底盘部分偏软,做工粗糙,悬架系统性能较差而且还不是四轮驱动,平心而论并不适合做这类电动平路赛的比赛用车。
但是由于大赛对于底盘改造规则相当严格,所以对所有车队而言也非常公平,那么接下来如何合理调整相应参数使得赛车性能提高,将是所有车队面临的问题和挑战。
3.1车模重心的调整:在赛车各部分零部件大体完成的时候,我们通过移动车上零部件的位置,对其重心进行了调整,通过大量的对比实验后发现:不论使重心偏左还是偏右,赛车在弯道较多的赛道上都会出现不同程度的滑移和转向不足。
因此,重心应当尽量处在相对车模左右对称的中心平面内。
另外,通过实验发现:当赛车重心偏后时,虽然增大了后轮与地面间的摩擦,提高了车子的抓地力,使得起步较快。
但是,由于前轮上所分配的载荷较轻,使赛车转向时前轮滑移,造成过弯时间变长。
当赛车重心偏后的时候,虽然使得转向更平稳,但后轮的附着力不足,导致赛车动力不足,起步变慢。
因此,综上考虑,根据赛车的实际情况调整车体重心,使其处于中心偏后优化其稳定性。
3.2齿轮啮合间隙的调整赛车驱动为主办方提供的RS-380SH-4045电机,做后轴驱动。
电机传动轴和赛车后轴之间采用齿轮啮合传动,传动比为9:38。
另外,光编码器和后轴之间同样采用齿轮啮合。
齿轮啮合性能的好坏,直接影响电机的驱动效率。